
A Modified Shielding and Rapid Transition DDES Model for Separated Flows

Abstract
:1. Introduction
1.1. Modeled Stress Depletion
1.2. RANS-to-LES Transition (RLT) Problem
1.3. Coupling of the MSD and RLT Problems
2. Proposed Approaches
2.1. Alternative Grid Length Scales
2.1.1. Max Length Scale
2.1.2. Shear Layer Adapted Length Scale
2.2. Modifications of the Shielding Function
2.2.1. Standard Shielding Function
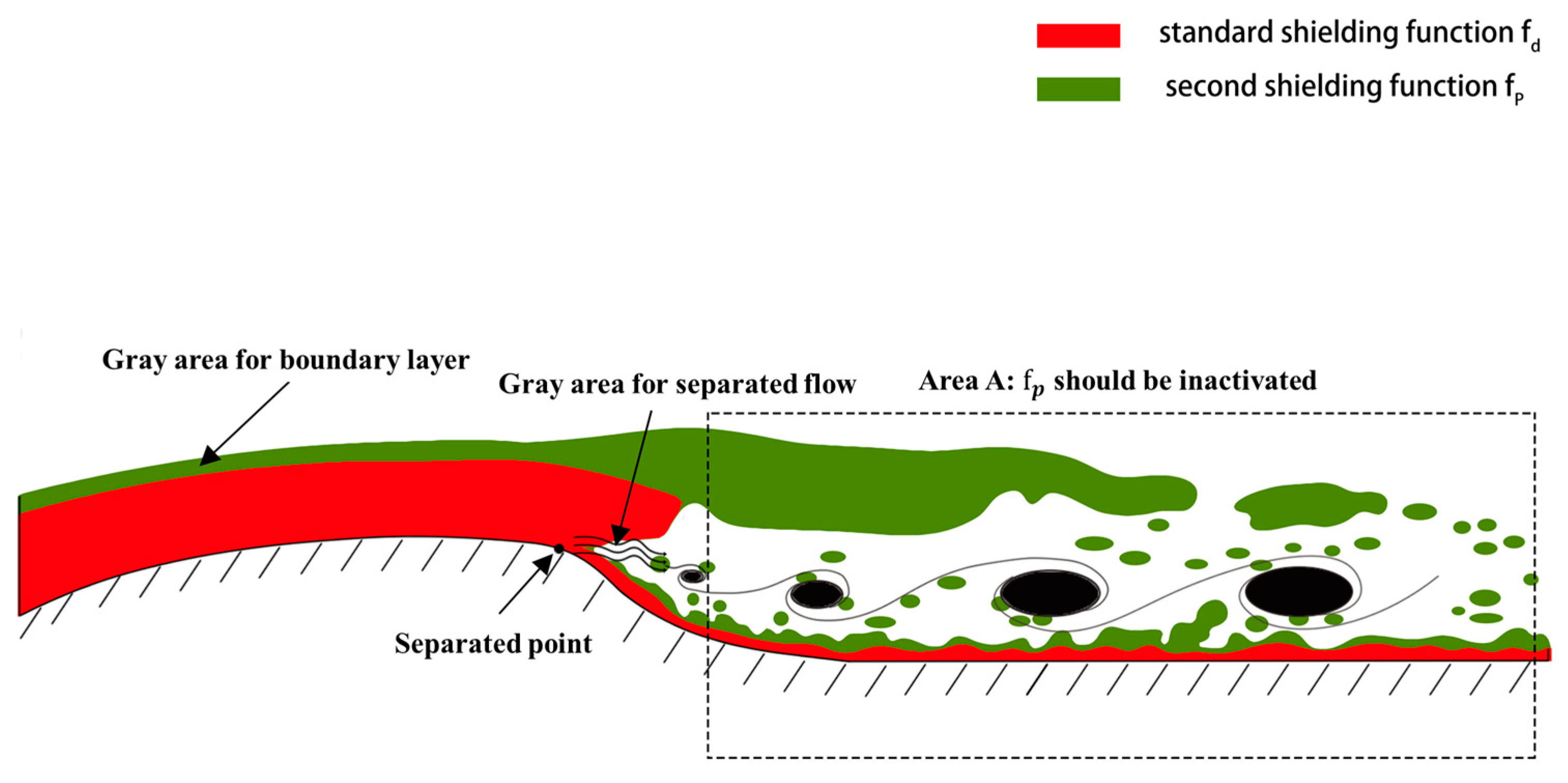
2.2.2. Second Shielding Function
2.2.3. Modified Shielding Function
3. Results
3.1. Numerical Methodology
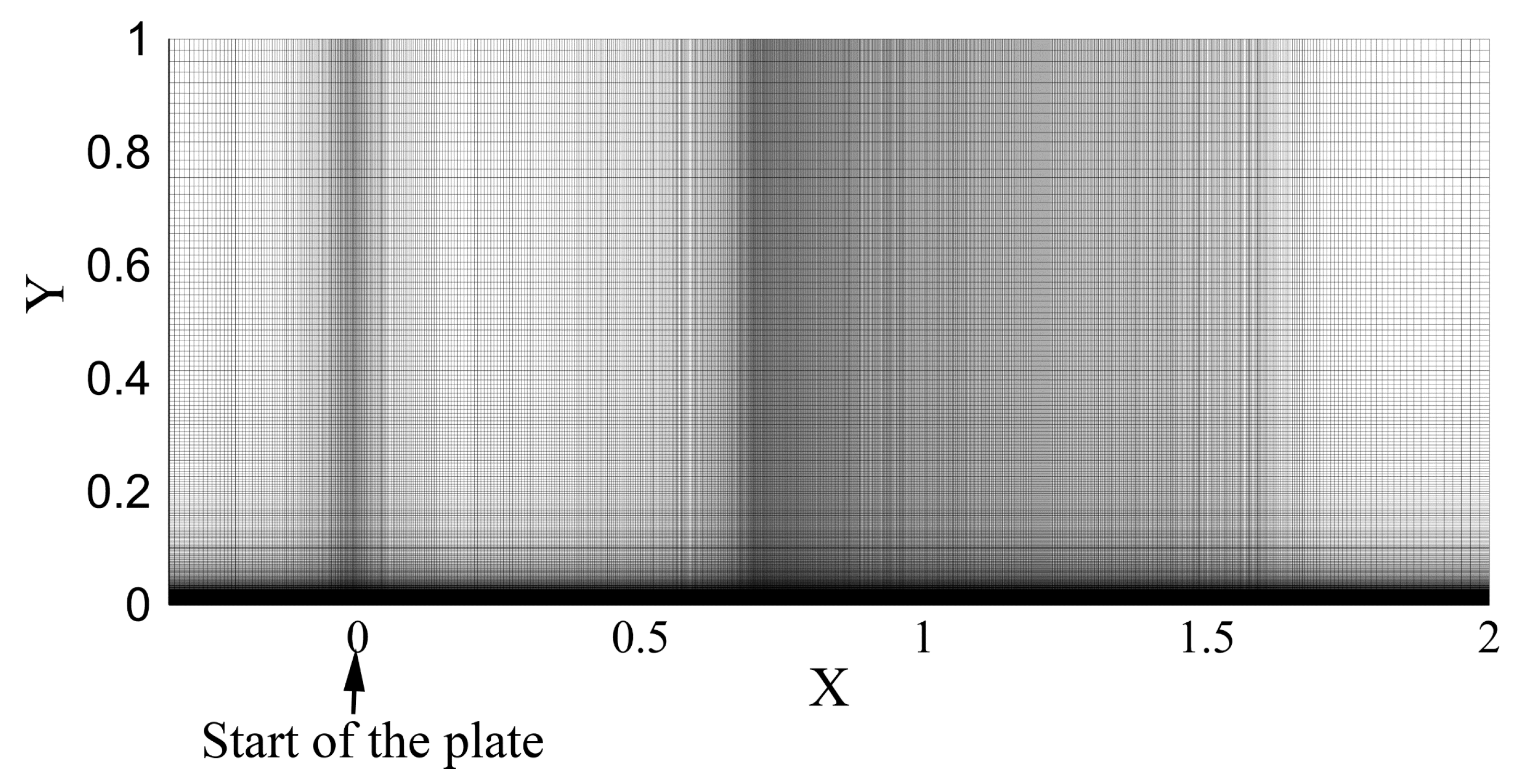
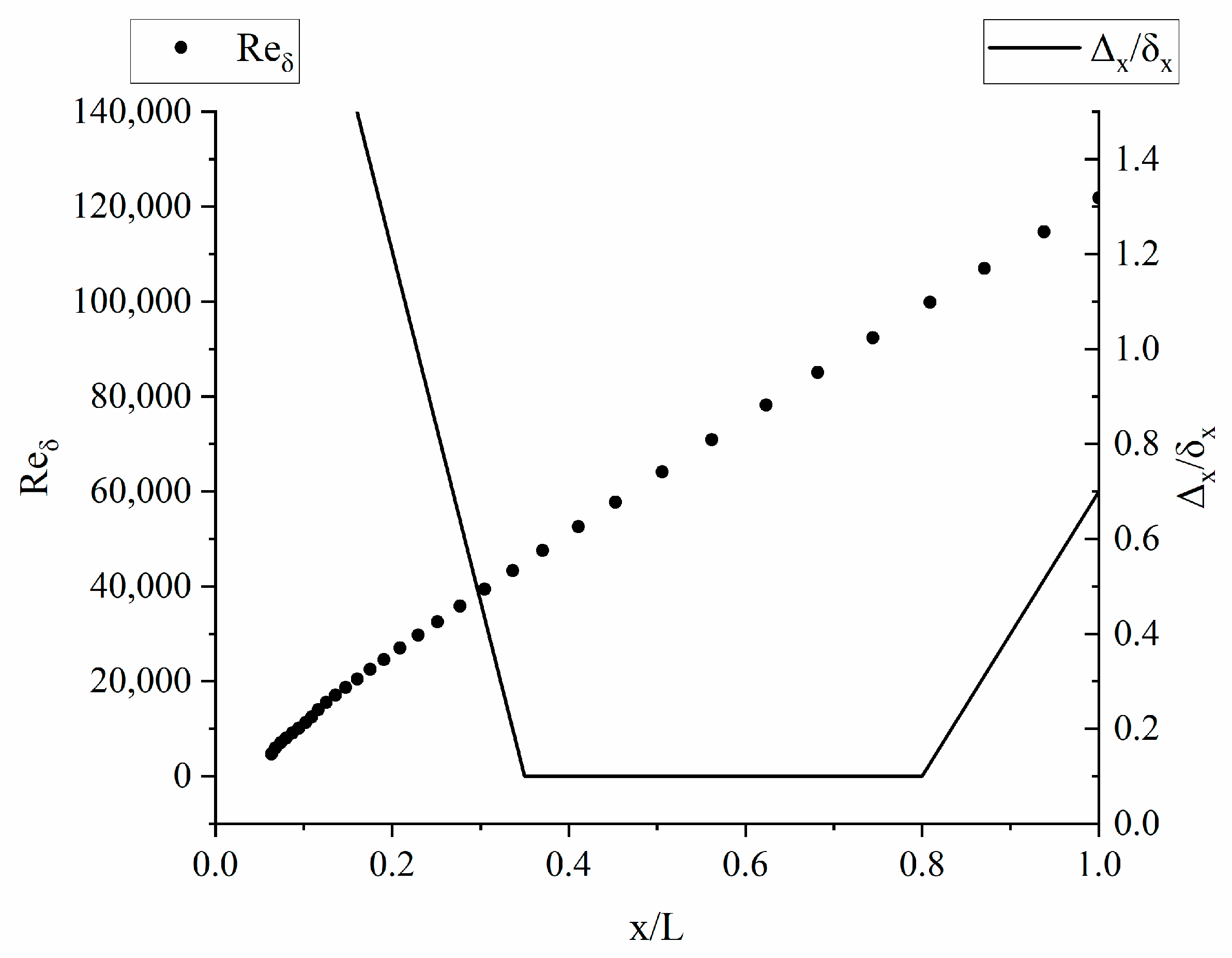
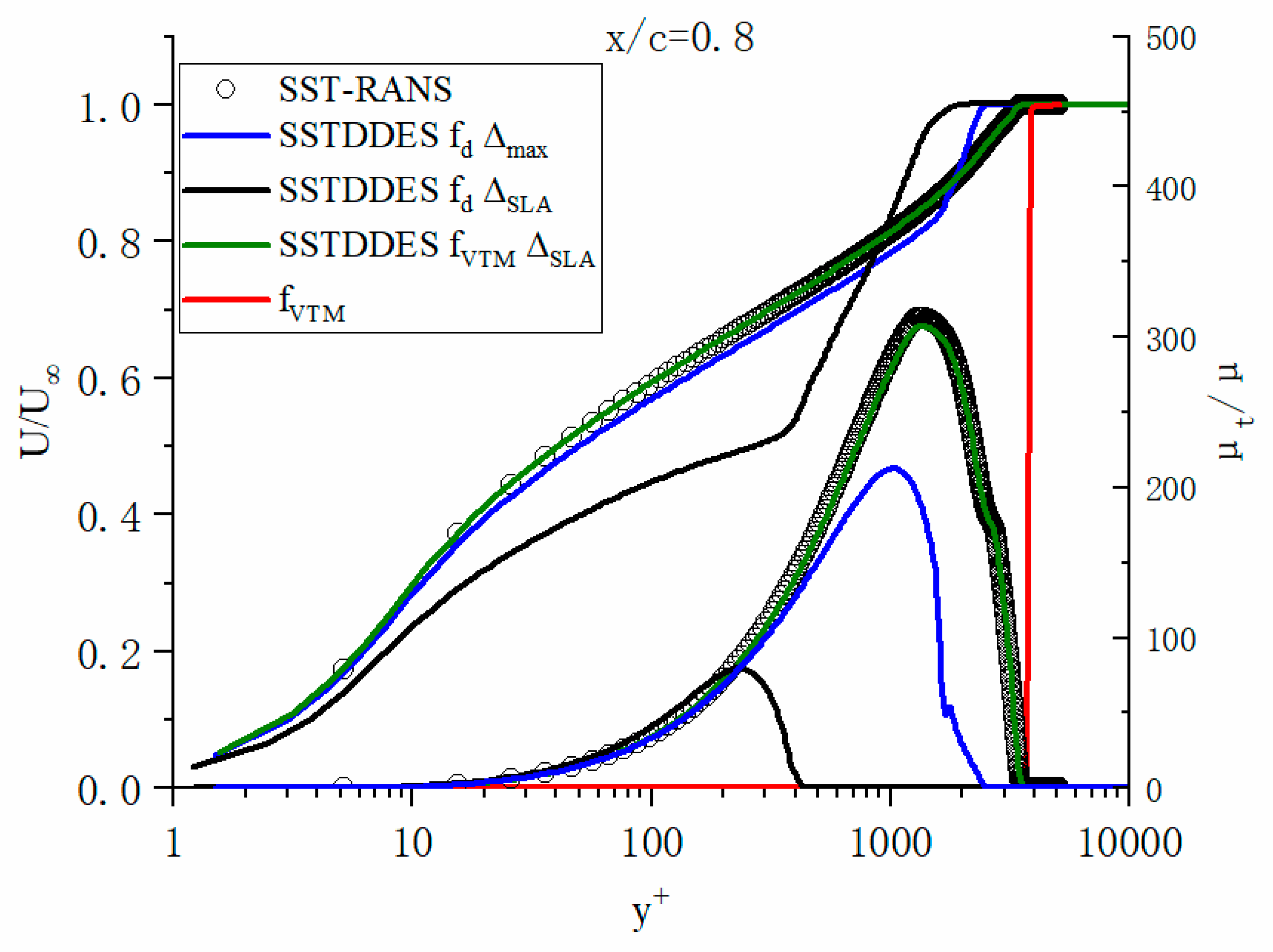
3.2. Flat-Plate Boundary-Layer Case
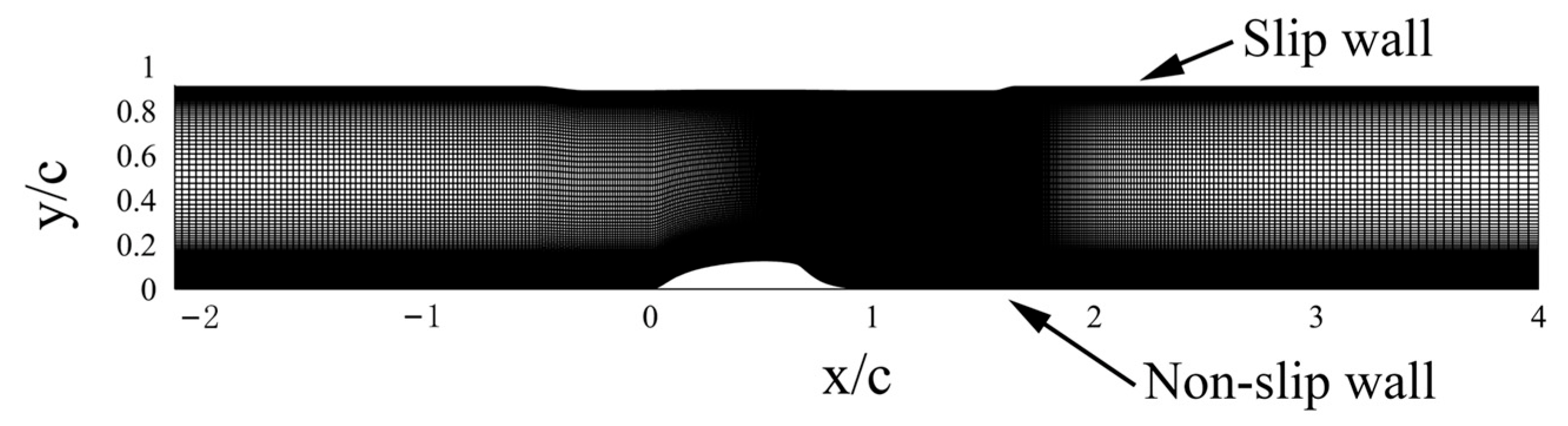
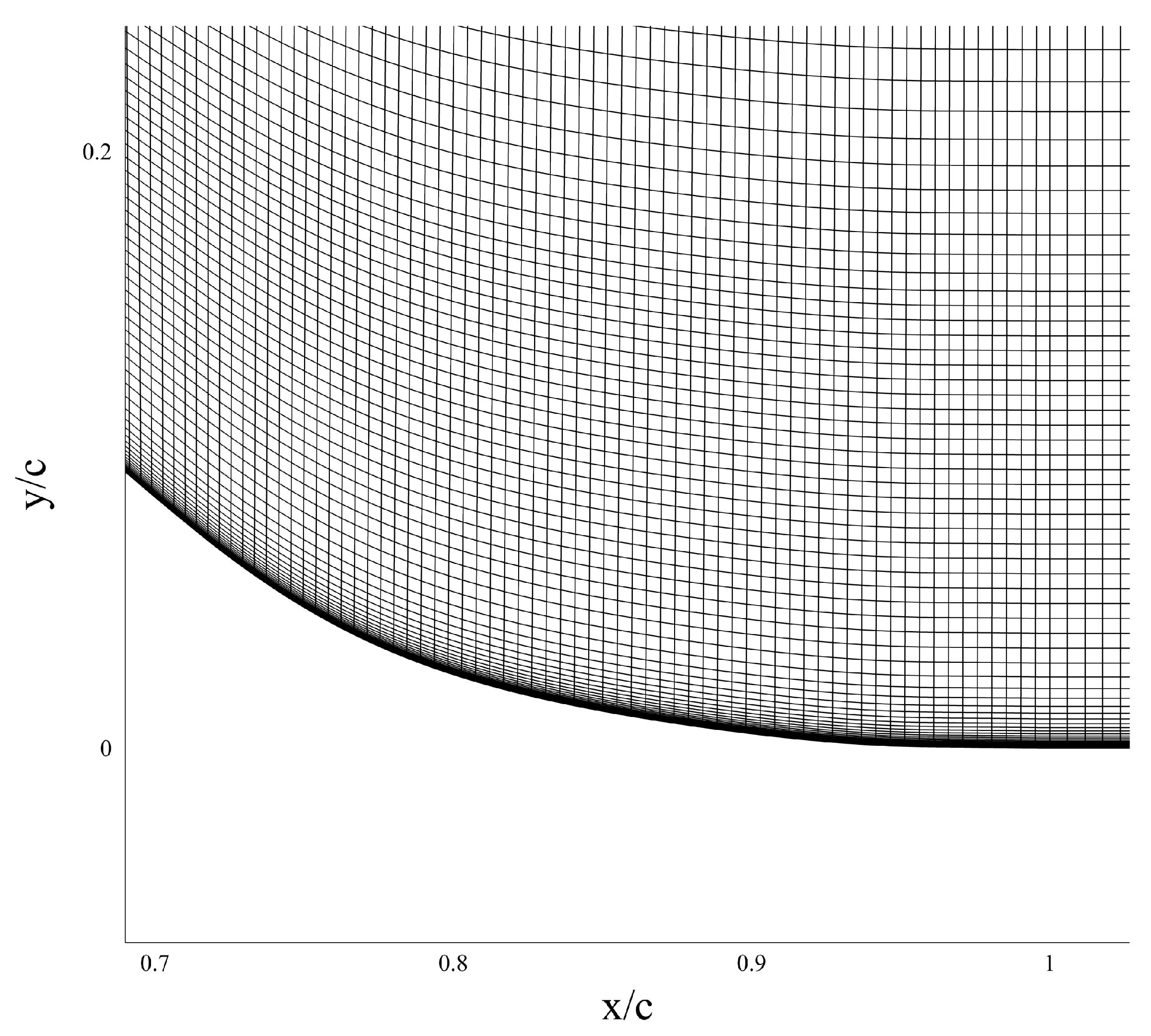
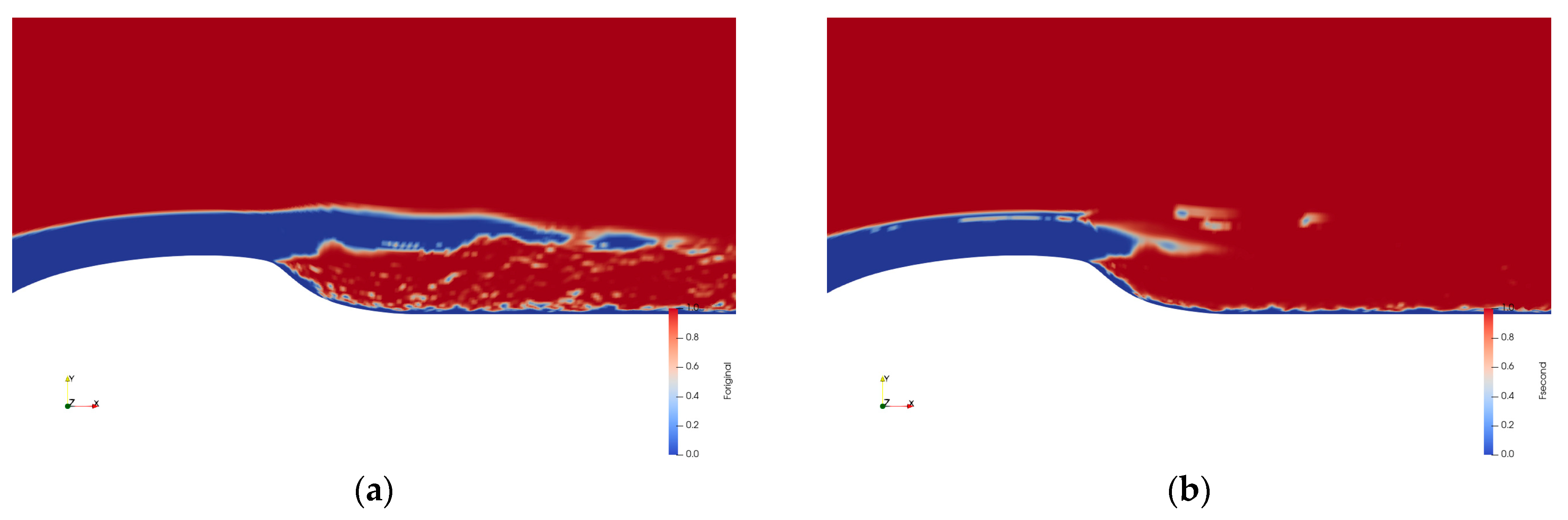
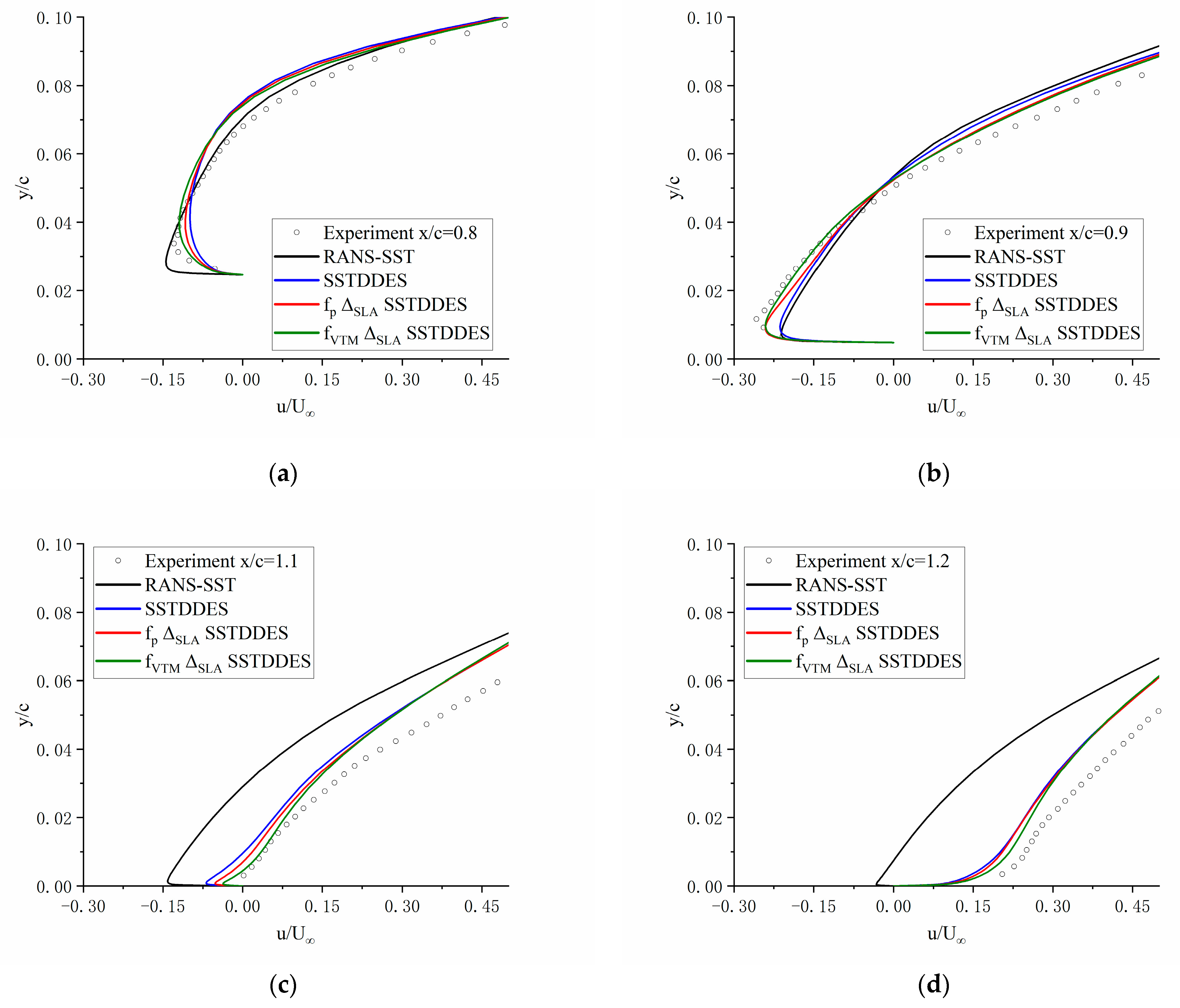
3.3. Flow over the Hump
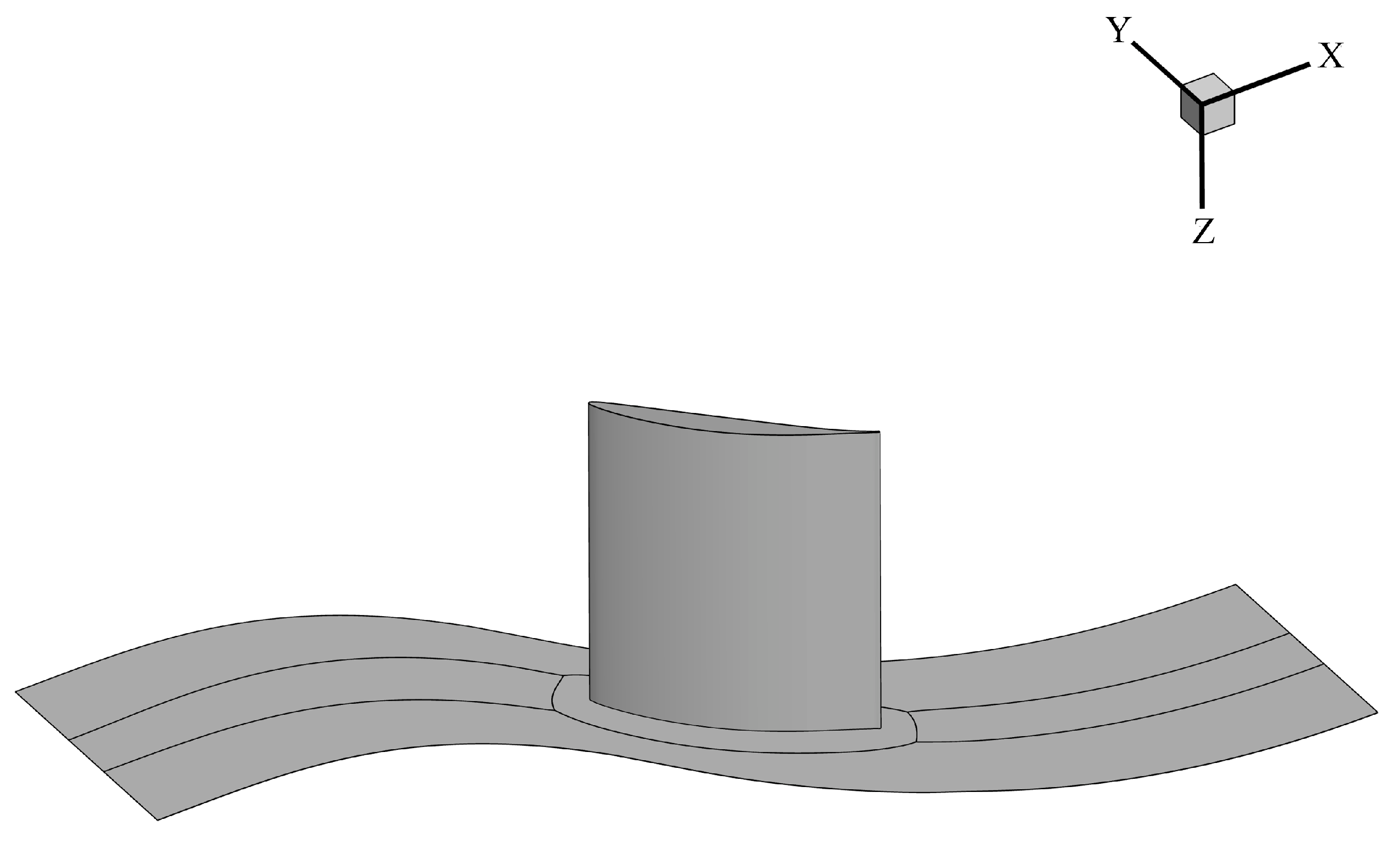
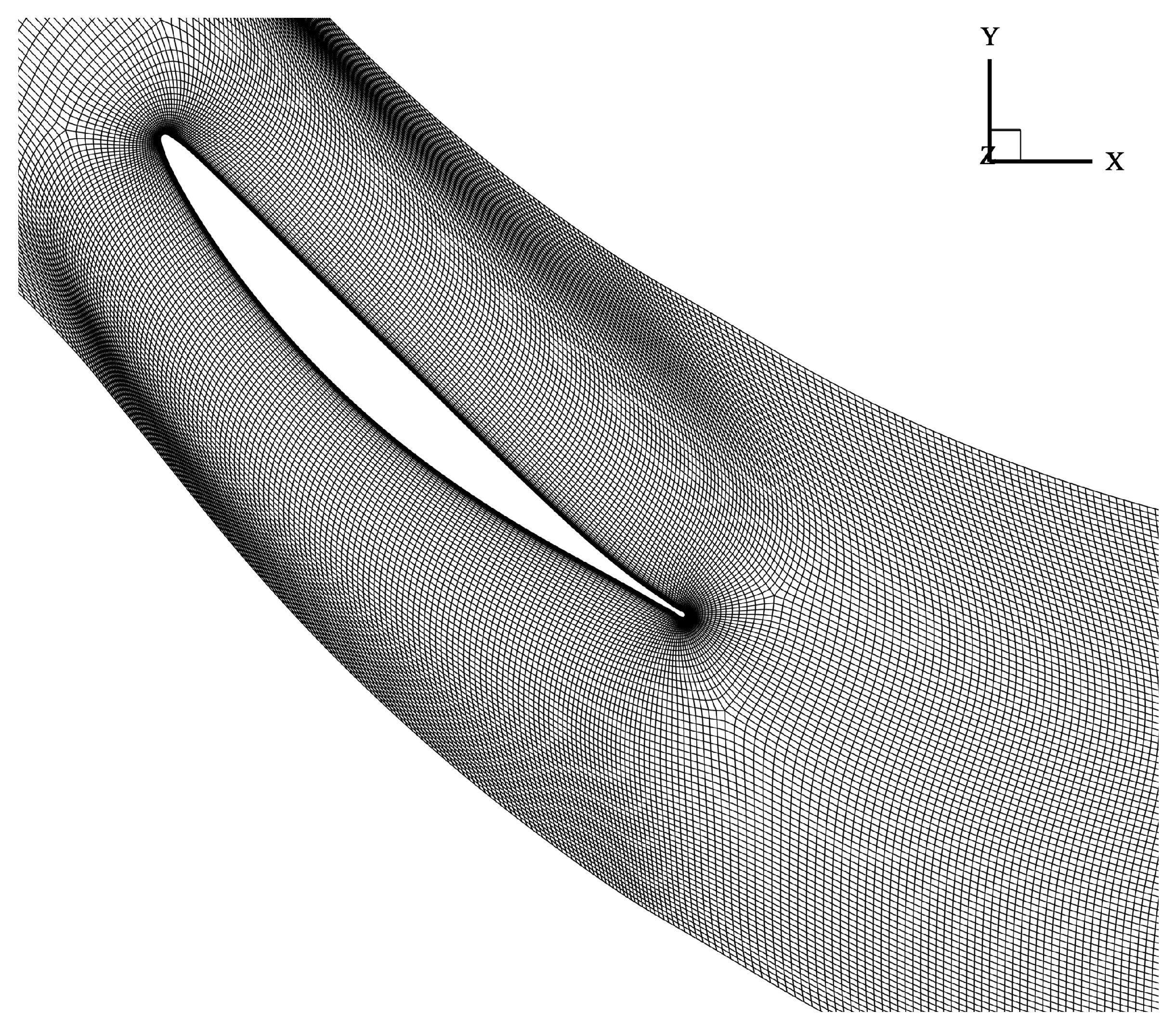
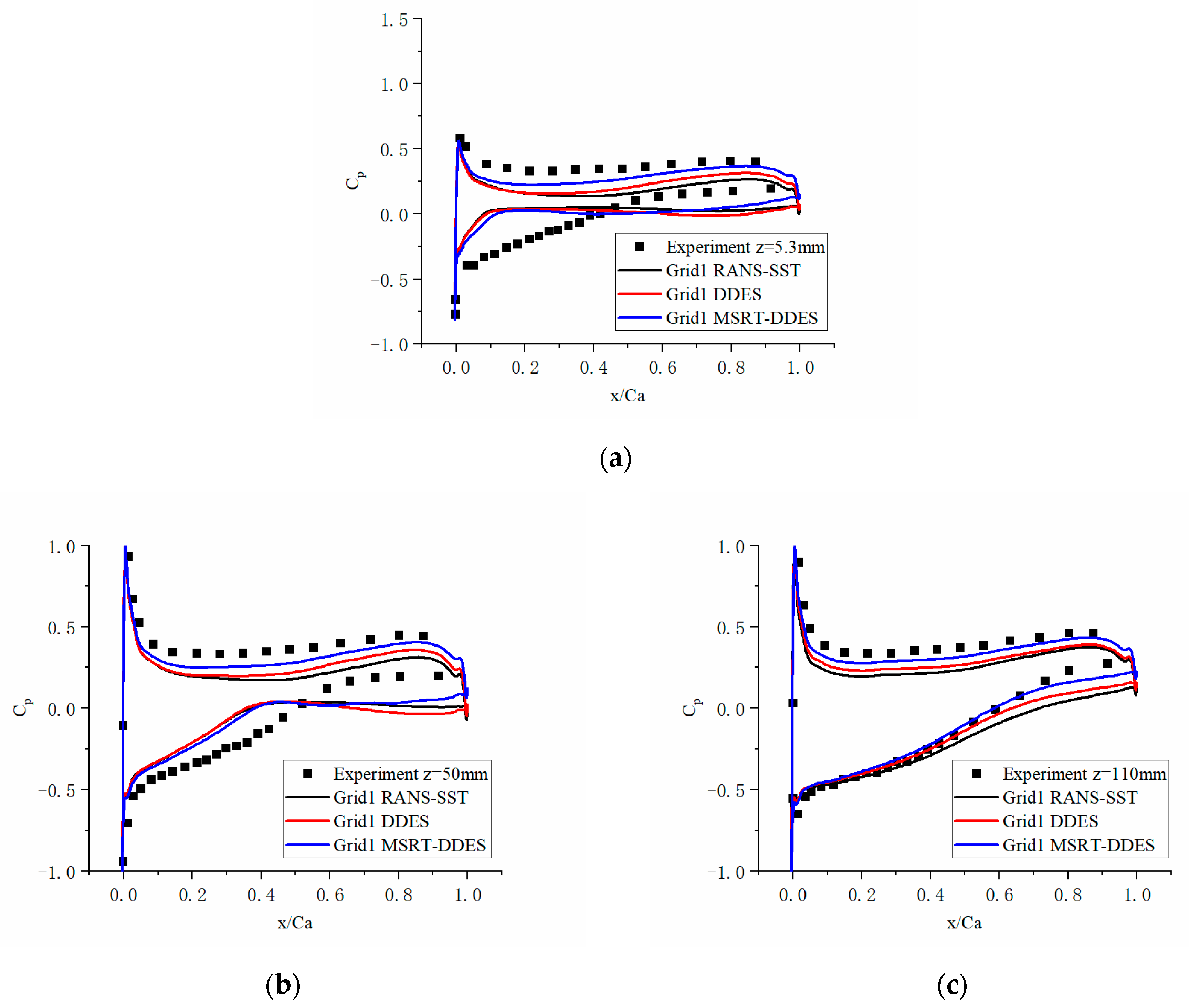
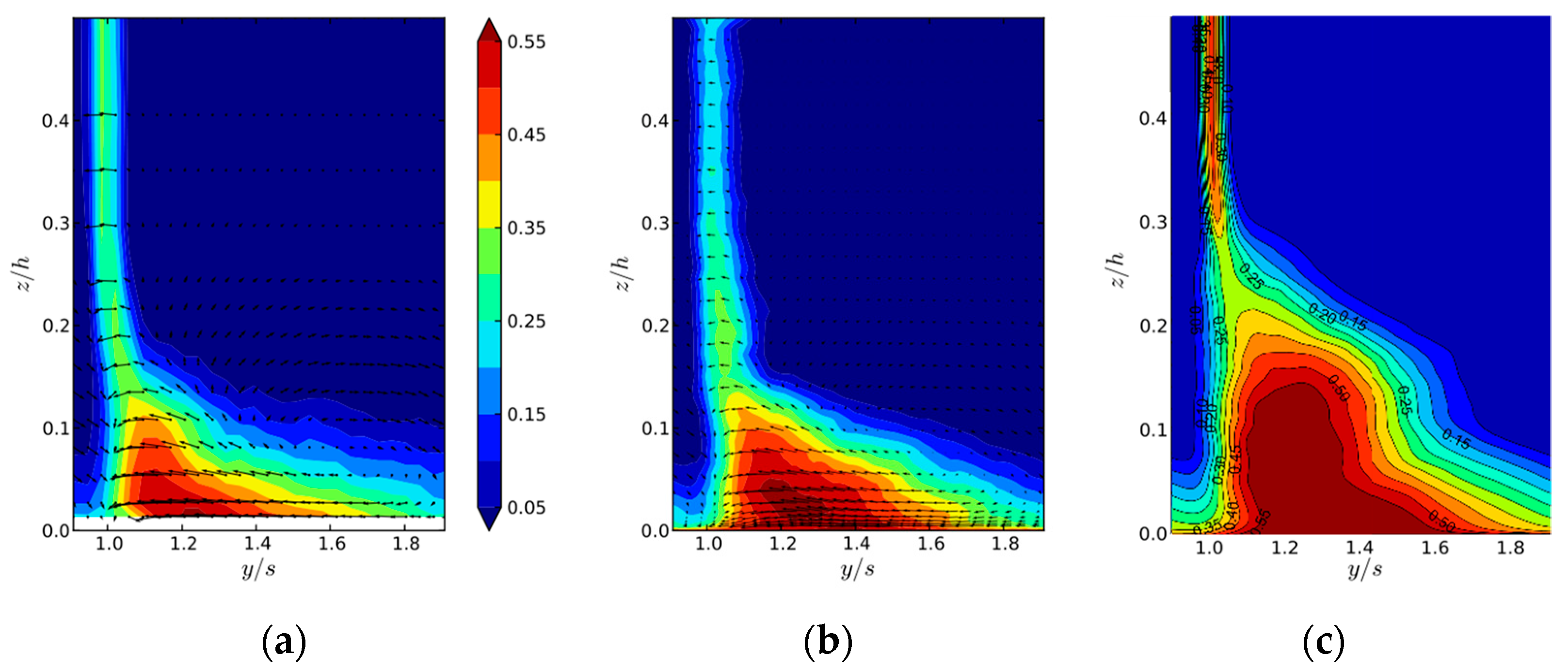
4. Corner Separation in the Linear Compressor Cascade
5. Conclusions
- The provided practical remedies to the RANS-LES transition problem and maintained normal LES behavior in the developed 3D turbulence. Reutilization of the VTM made the increase of computational consumption acceptable.
- The modified shielding function was successful in solving the MSD problem, which could be exacerbated by mesh refinement and the utilization of .
- The original second shielding function was found to make DDES abnormally switch to RANS behavior when resolved turbulence was present in separated and reattached flow near the wall, which was ameliorated by the introduction of the new inhibition function . The utilization of led to a moderate improvement with respect to separated–reattached flows.
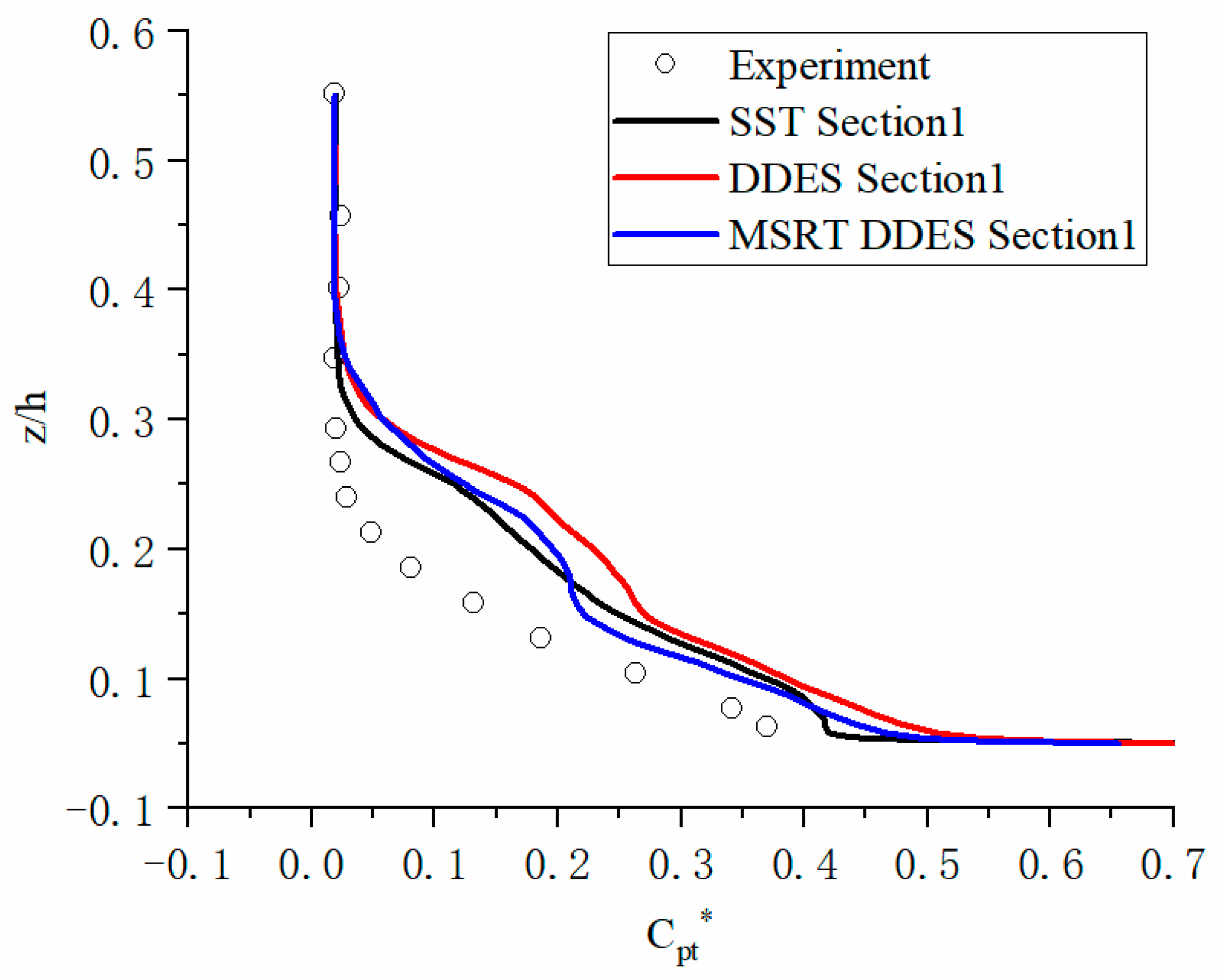
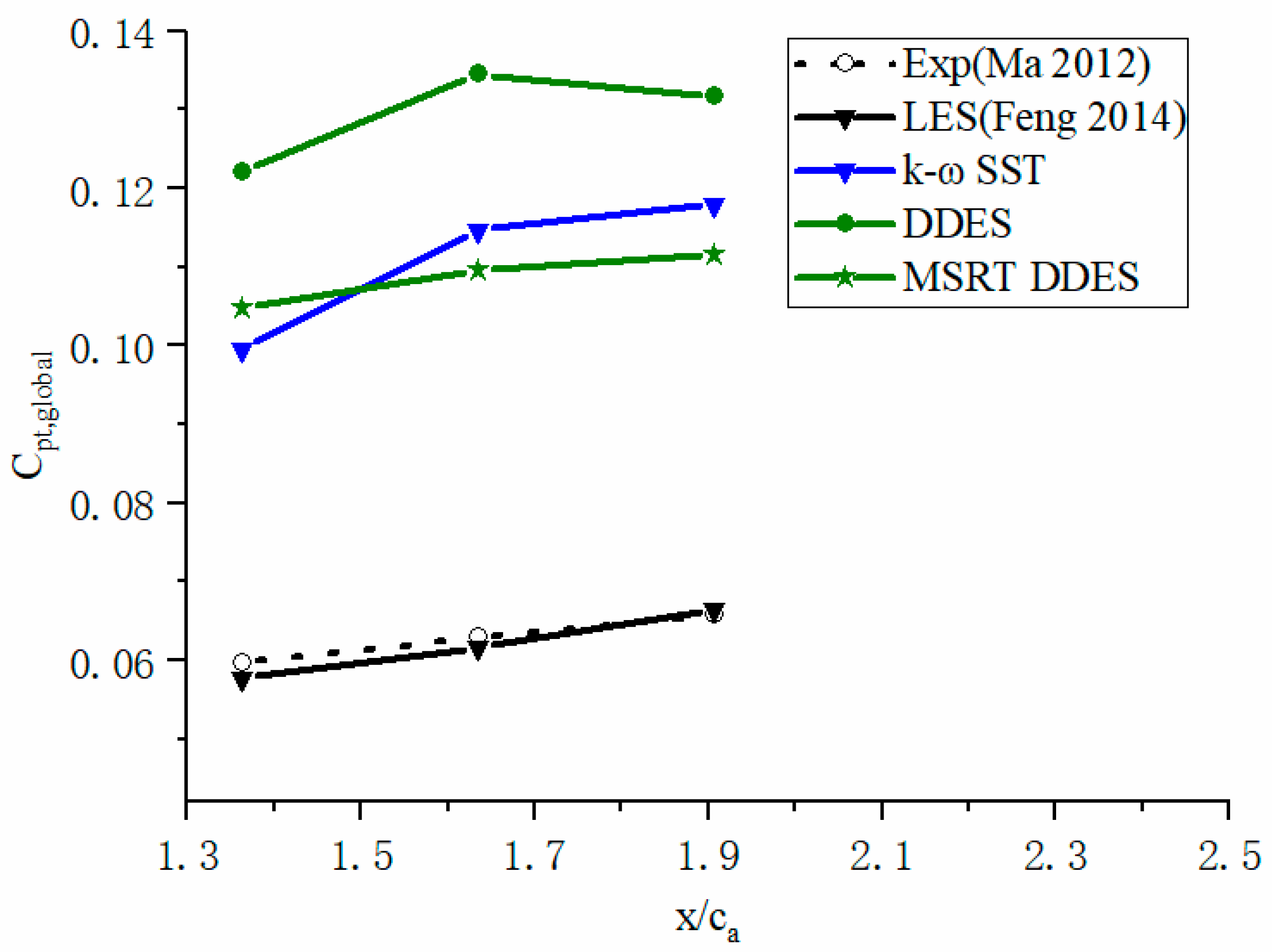
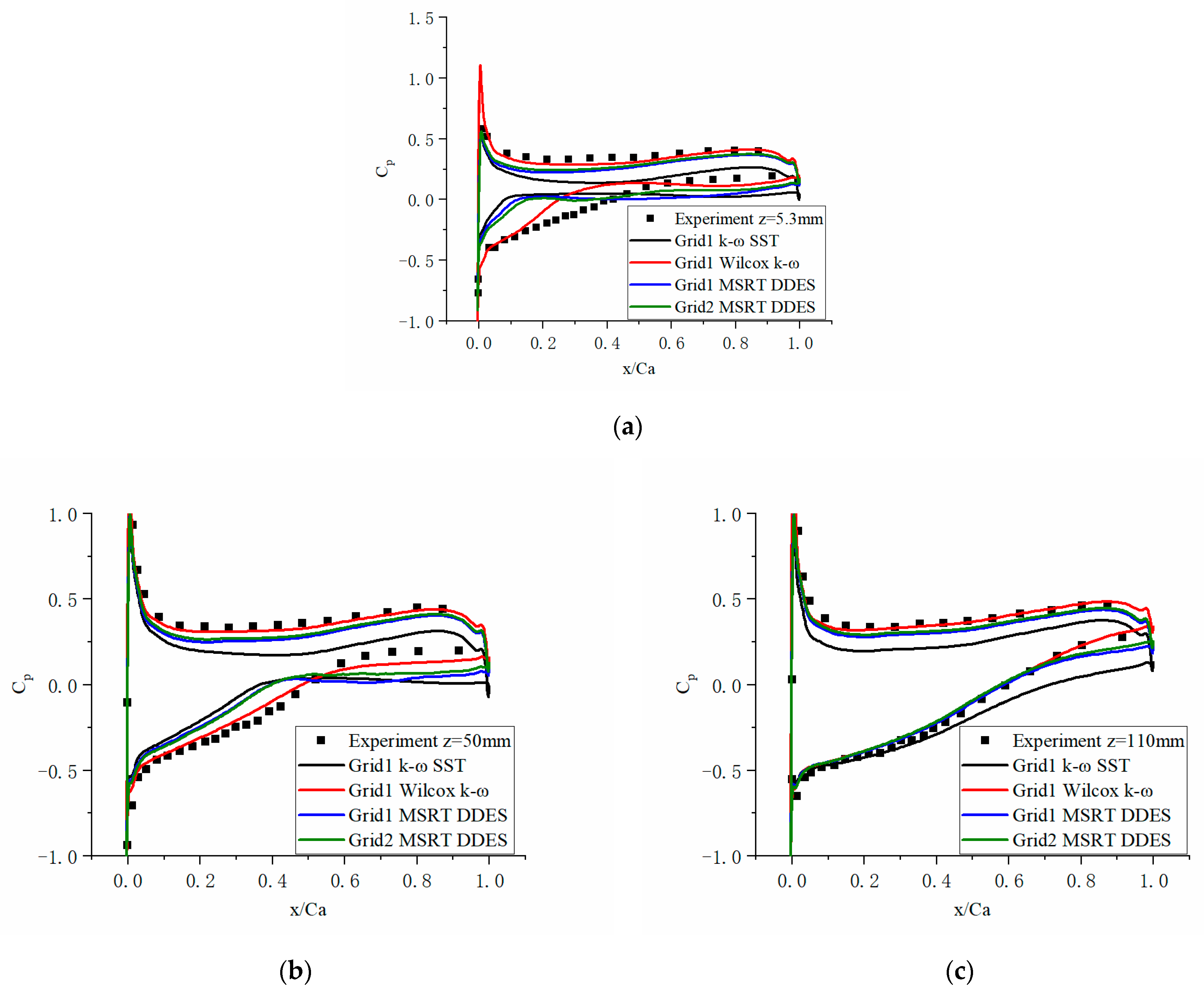
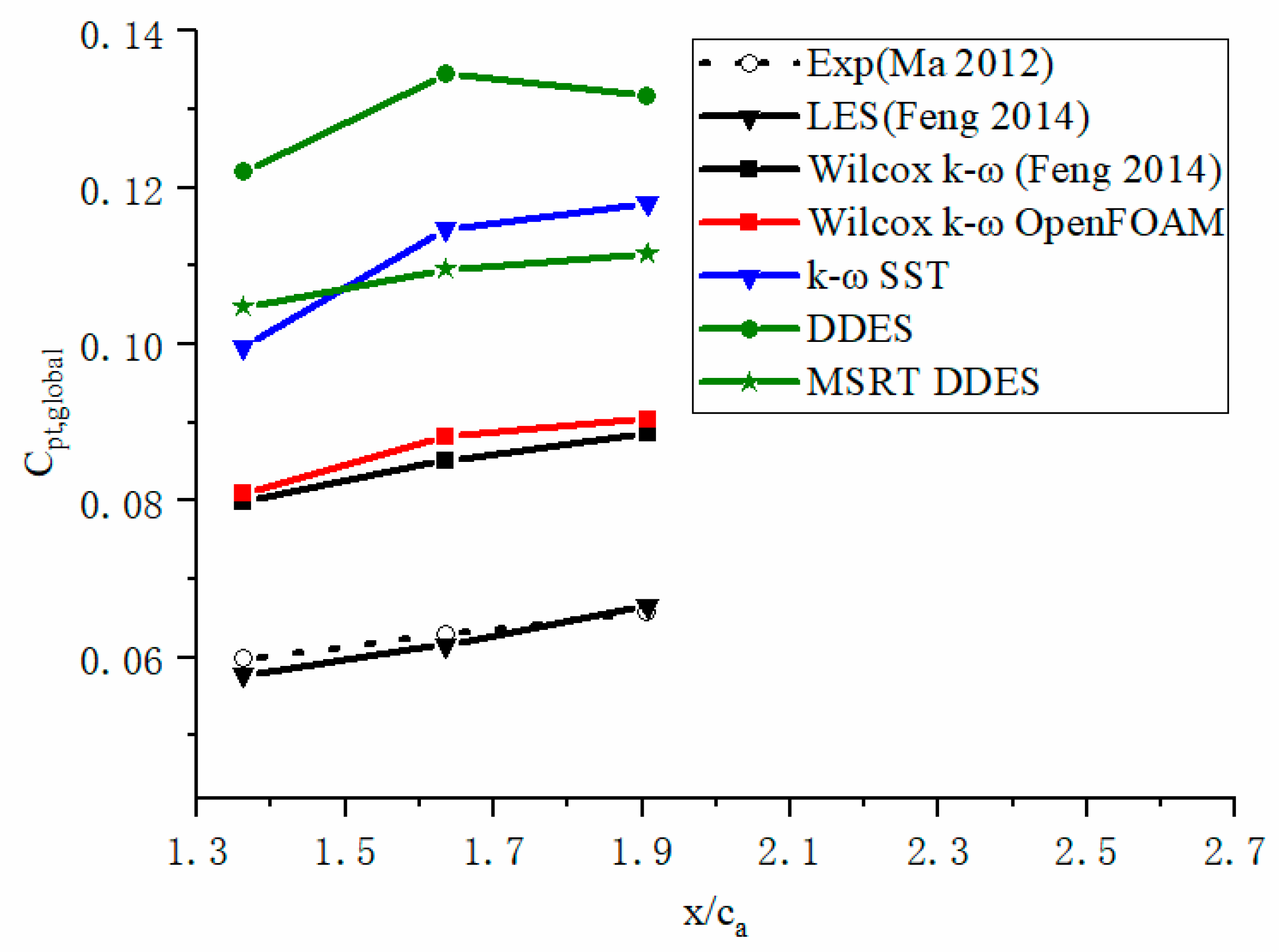
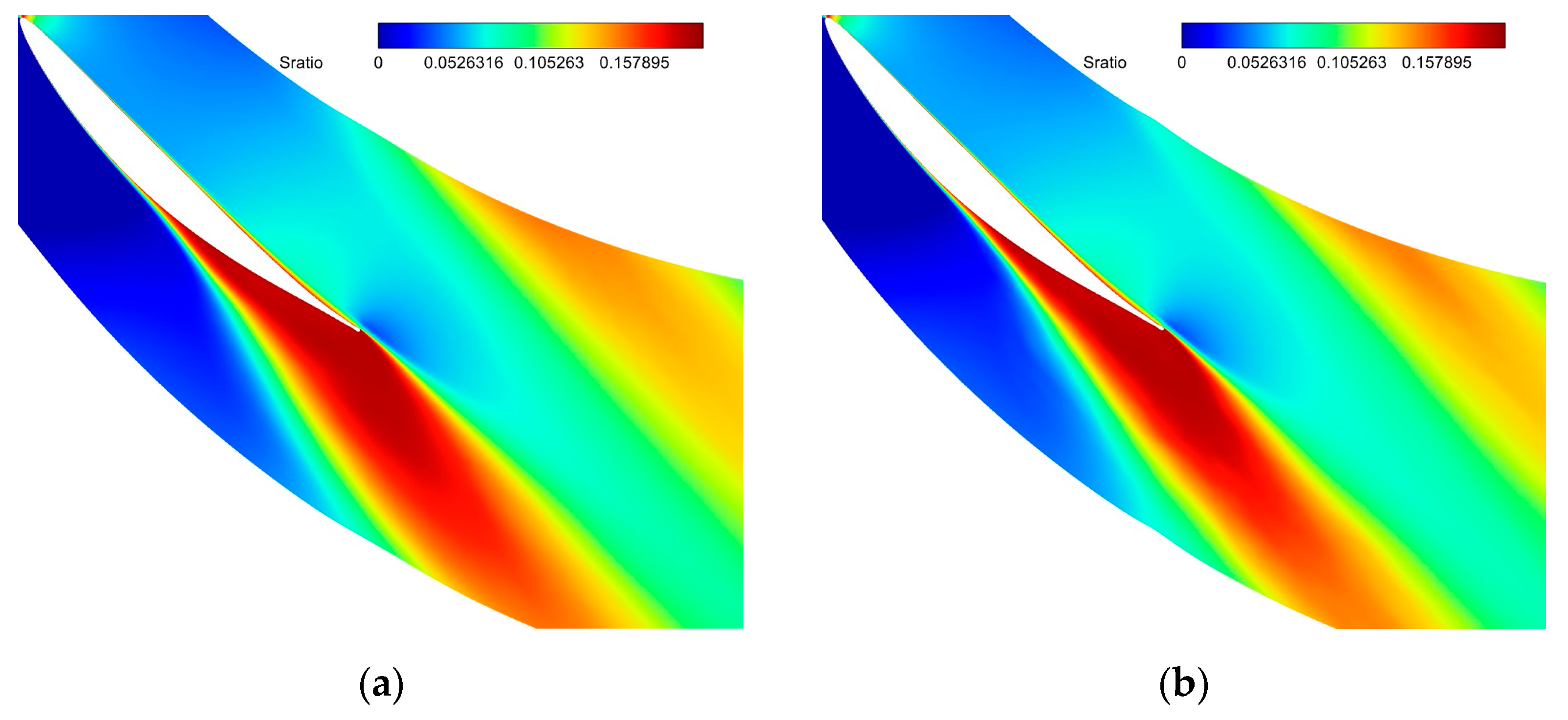
- The behavior of the MSRT DDES was more reliable than the standard DDES for a three-dimensional separation flow. By conducting a detailed analysis of physical quantities such as entropy increment ratio and total pressure-loss coefficients, the loss result of the MSRT DDES was almost equal to that of the corresponding RANS, which is proof of success when considering that the point of separation and the extension of the separation zone were mostly determined by the RANS part of the modeling in this case. The performance of the MSRT DDES could be further improved by the proper selection of the RANS base, e.g., the Wilcox k–ω-based MSRT DDES. This will be developed and evaluated in future work.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Spalart, P. Detached-eddy simulation. Annu. Rev. Fluid Mech. 2009, 41, 181–202. [Google Scholar] [CrossRef]
- Spalart, P.; Jou, W.; Strelets, M.; Allmaras, S. Comments on the feasibility of LES for winds, and on a hybrid RANS/LES approach. In Proceedings of the 1st AFOSR International Conference on DNS/LES, Ruston, LA, USA, 4–8 August 1997. [Google Scholar]
- Deck, S.; Renard, N. Towards an enhanced protection of attached boundary layers in hybrid RANS/LES methods. J. Comput. Phys. 2020, 400, 108970. [Google Scholar] [CrossRef]
- Spalart, P.; Deck, S.; Shur, M.; Squires, K.; Strelets, M.; Travin, A. A new version of detached-eddy simulation, resistant to ambiguous grid densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Ashton, N. Recalibrating delayed detached-eddy simulation to eliminate modelled-stress depletion. In Proceedings of the 23rd AIAA Computational Fluid Dynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Probst, A.; Radespiel, R.; Wolf, C.; Knopp, T.; Schwamborn, D. A comparison of detached-eddy simulation and Reynolds-stress modeling applied to the flow over a backward-facing step and an airfoil at stall. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010. [Google Scholar]
- Jain, N.; Baeder, J. Assessment of shielding parameters in conventional DDES method under the presence of alternative turbulence length scales. In Proceedings of the 23rd AIAA Computational Fluid Dynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Deck, S.; Renard, N.; Laraufie, R.; Sagaut, P. Zonal detached eddy simulation (ZDES) of a spatially developing flat plate turbulent boundary layer over the Reynolds number range 3150 ⩽ Re θ⩽ 14,000. Phys. Fluids 2014, 26, 025116. [Google Scholar] [CrossRef]
- De Vanna, F.; Baldan, G.; Picano, F.; Benini, E. Effect of convective schemes in wall-resolved and wall-modeled LES of compressible wall turbulence. Comput. Fluids. 2023, 250, 105710. [Google Scholar] [CrossRef]
- Deck, S. Recent improvements in the zonal detached eddy simulation (ZDES) formulation. Theor. Comput. Fluid Dyn. 2012, 26, 523–550. [Google Scholar] [CrossRef]
- Mockett, C.; Fuchs, M.; Thiele, F.; Wallin, S.; Peng, S.; Deck, S.; Travin, A. Non-zonal approaches for grey area mitigation. In Go4Hybrid: Grey Area Mitigation for Hybrid RANS-LES Methods; Springer: Cham, Switzerland, 2018; pp. 17–50. [Google Scholar]
- Poletto, R.; Revell, A.; Craft, T.; Jarrin, N. Divergence free synthetic eddy method for embedded LES inflow boundary conditions. In Proceedings of the 7th International Symposium on Turbulence and Shear Flow Phenomena, Ottawa, ON, Canada, 28–31 July 2011. [Google Scholar]
- Shur, M.; Strelets, M.; Travin, A.; Probst, A.; Probst, S.; Schwamborn, D.; Revell, A. Improved embedded approaches. In Go4Hybrid: Grey Area Mitigation for Hybrid RANS-LES Methods; Springer: Cham, Switzerland, 2018; pp. 51–87. [Google Scholar]
- Mockett, C.; Fuchs, M.; Garbaruk, A.; Shur, M.; Spalart, P.; Strelets, M.; Travin, A. Two non-zonal approaches to accelerate RANS to LES transition of free shear layers in DES. In Progress in Hybrid RANS-LES Modelling; Springer: Cham, Switzerland, 2015; pp. 187–201. [Google Scholar]
- Nicoud, F.; Ducros, F. Subgrid-scale stress modelling based on the square of the velocity gradient tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]
- Nicoud, F.; Toda, H.; Cabrit, O.; Bose, S.; Lee, J. Using singular values to build a subgrid-scale model for large eddy simulations. Phys. Fluids 2011, 23, 085106. [Google Scholar] [CrossRef] [Green Version]
- Chauvet, N.; Deck, S.; Jacquin, L. Zonal detached eddy simulation of a controlled propulsive jet. AIAA J. 2007, 45, 2458–2473. [Google Scholar] [CrossRef]
- Shur, M.; Spalart, P.; Strelets, M.; Travin, A. An enhanced version of DES with rapid transition from RANS to LES in separated flows. Flow Turbul. Combust. 2015, 95, 709–737. [Google Scholar] [CrossRef]
- He, X.; Zhao, F.; Vahdati, M. Detached eddy simulation: Recent development and application to compressor tip leakage flow. J. Turbomach. 2022, 144, 011009. [Google Scholar] [CrossRef]
- Xia, G.; Yin, Z.; Medic, G. Application of SST-based SLA-DDES formulation to turbomachinery flows. In Progress in Hybrid RANS-LES Modelling; Springer: Cham, Switzerland, 2020; pp. 335–346. [Google Scholar]
- Shur, M.; Spalart, P.; Strelets, M.; Travin, A. A hybrid RANS-LES approach with delayed-DES and wall-modelled LES capabilities. Int. J. Heat Fluid Flow 2008, 29, 1638–1649. [Google Scholar] [CrossRef]
- De Vanna, F.; Bernardini, M.; Picano, F.; Benini, E. Wall-modeled LES of shock-wave/boundary layer interaction. Int. J. Heat Fluid Flow 2022, 98, 109071. [Google Scholar] [CrossRef]
- Gritskevich, M.; Garbaruk, A.; Schütze, J.; Menter, F. Development of DDES and IDDES formulations for the k-ω shear stress transport model. Flow Turbul. Combust. 2012, 88, 431–449. [Google Scholar] [CrossRef]
- Reddy, K.R.; Ryon, J.A.; Durbin, P.A. A DDES model with a Smagorinsky-type eddy viscosity formulation and log-layer mismatch correction. Int. J. Heat Fluid Flow 2014, 50, 103–113. [Google Scholar] [CrossRef]
- Issa, R.I. Solution of the Implicitly Discretised Fluid Flow Equations by Operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Zhiyin, Y. Large-eddy simulation: Past, present and the future. Chin. J. Aeronaut. 2015, 28, 11–24. [Google Scholar] [CrossRef] [Green Version]
- Travin, A.; Shur, M.; Strelets, M.; Spalart, P. Physical and numerical upgrades in the detached-eddy simulation of complex turbulent flows. In Advances in LES of Complex Flows; Springer: Dordrecht, The Netherlands, 2002; pp. 239–254. [Google Scholar]
- Greenblatt, D.; Paschal, K.; Yao, C.; Harris, J. Experimental investigation of separation control part 2: Zero mass-flux oscillatory blowing. AIAA J. 2006, 44, 2831–2845. [Google Scholar] [CrossRef]
- Gbadebo, S.; Cumpsty, N.; Hynes, T. Three-dimensional separations in axial compressors. J. Turbomach. 2005, 127, 331–339. [Google Scholar] [CrossRef]
- Ma, W.; Ottavy, X.; Lu, L.; Leboeuf, F.; Gao, F. Experimental study of corner stall in a linear compressor cascade. Chin. J. Aeronaut. 2011, 24, 235–242. [Google Scholar] [CrossRef]
- Ma, W.; Ottavy, X.; Lu, L.; Leboeuf, F.; Gao, F. Experimental investigations of corner stall in a linear compressor cascade. In Proceedings of the ASME 2011 Turbo Expo: Turbine Technical Conference and Exposition, Vancouver, BC, Canada, 6–10 June 2011. [Google Scholar]
- Gao, F.; Ma, W.; Boudet, J.; Ottavy, X.; Lu, L.; Leboeuf, F. Numerical analysis of three-dimensional corner separation in a linear compressor cascade. In Proceedings of the ASME Turbo Expo 2013: Turbine Technical Conference and Exposition, San Antonio, TX, USA, 3–7 June 2013. [Google Scholar]
- Gao, F. Advanced Numerical Simulation of Corner Separation in a Linear Compressor Cascade. Ph.D. Thesis, Ecole Centrale de Lyon, Écully, France, 2014. [Google Scholar]
- Gao, F.; Ma, W.; Sun, J.; Boudet, J.; Ottavy, X.; Liu, Y.; Shao, L. Parameter study on numerical simulation of corner separation in LMFA-NACA65 linear compressor cascade. Chin. J. Aeronaut. 2017, 30, 15–30. [Google Scholar] [CrossRef]
- Xia, G.; Medic, G.; Praisner, T. Hybrid RANS/LES simulation of corner stall in a linear compressor cascade. J. Turbomach. 2018, 140, 081004. [Google Scholar] [CrossRef]
- Yin, Z. Adaptive detached eddy simulation of end-wall flow in a linear compressor cascade. In Proceedings of the ASME Turbo Expo 2020: Turbomachinery Technical Conference and Exposition, Virtual, 21–25 September 2020. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: Mumbai, India, 2006. [Google Scholar]
- Zhao, R.; Yan, C.; Li, X.; Kong, W. Towards an entropy-based detached-eddy simulation. Sci. China Phys. Mech. Astron. 2013, 56, 1970–1980. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Length Scale | Quasi-2D Flow Regions | Developed 3D Turbulence |
|---|---|---|
| [23] | ||
| [24] | ||
| [18] | ||
| [18] |
| Name | Magnitude |
|---|---|
| Chord () | 0.150 m |
| Pitch/spacing () | 0.134 m |
| Blade span () | 0.370 m |
| Stagger angle () | 42.70° |
| Camber angle () | 23.22° |
| Incidence angle () | 4° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, D.; Yang, H.; Zheng, Y.; Gao, Q.; Jin, X. A Modified Shielding and Rapid Transition DDES Model for Separated Flows. Entropy 2023, 25, 613. https://doi.org/10.3390/e25040613
Lei D, Yang H, Zheng Y, Gao Q, Jin X. A Modified Shielding and Rapid Transition DDES Model for Separated Flows. Entropy. 2023; 25(4):613. https://doi.org/10.3390/e25040613
Chicago/Turabian StyleLei, Da, Hui Yang, Yun Zheng, Qingzhe Gao, and Xiubo Jin. 2023. "A Modified Shielding and Rapid Transition DDES Model for Separated Flows" Entropy 25, no. 4: 613. https://doi.org/10.3390/e25040613