



A Cartesian-Based Trajectory Optimization with Jerk Constraints for a Robot
 ,
,
Abstract
:1. Introduction
1.1. Related Works
1.2. Motivations and Contributions
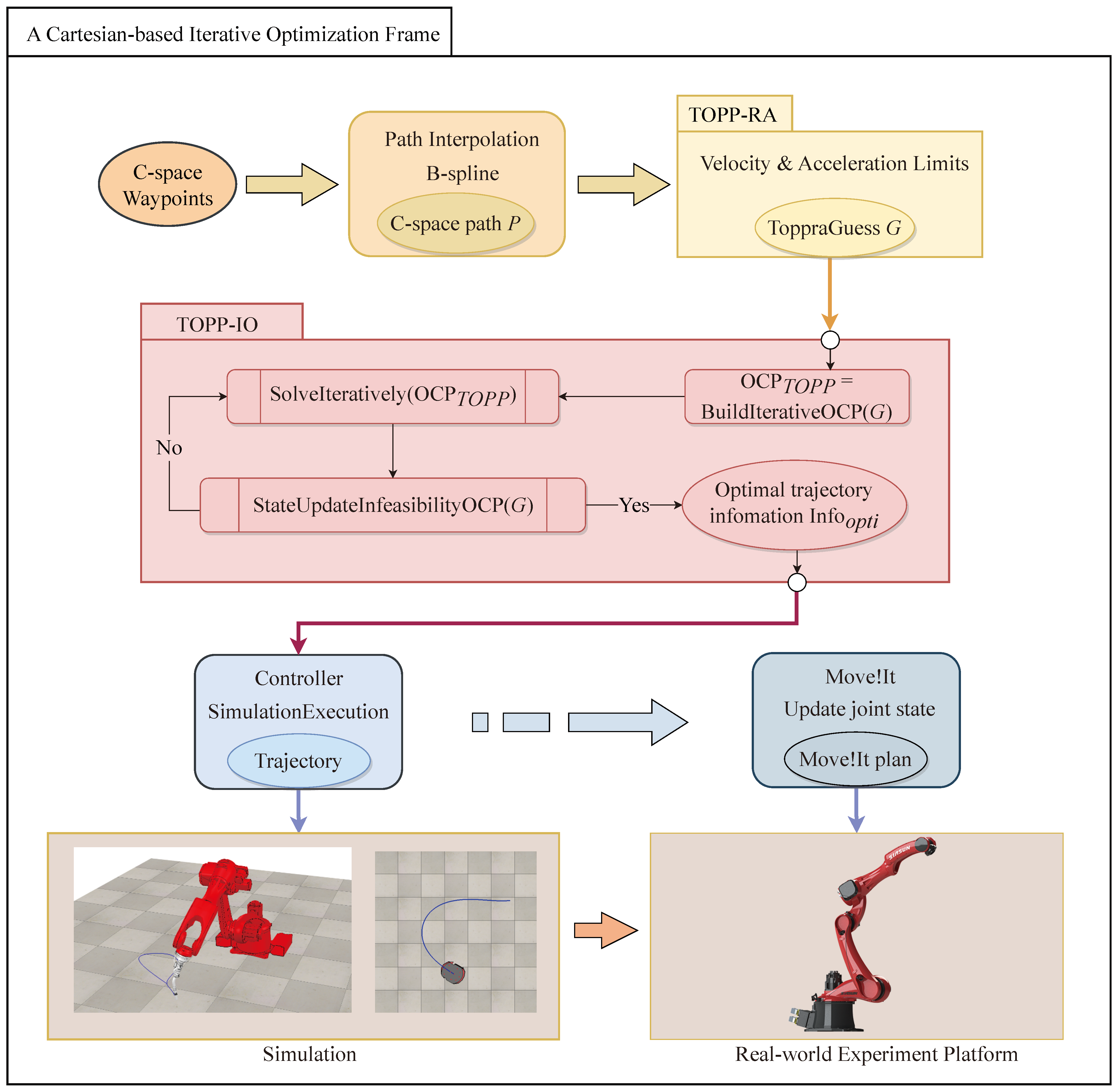
- A comprehensive and effective framework for iterative optimization is presented to establish the OCP formulation of the TOTP problem, which is described by the path parameter s;
- Given an efficient computational solution for computing the nonlinear TOPP in Cartesian space while satisfying third-order constraints in joint space;
- Experiments have demonstrated that the proposed method can effectively generate smoother trajectories that satisfy jerk constraints on a wide range of robot systems.
2. Problem Statement
2.1. General Description
2.2. Objective Function
2.3. Constraints
2.3.1. Status-Update Constraints
2.3.2. States/Control Profiles Constraints
2.3.3. Boundary Constraints
3. TOPP by Iterative Optimization (TOPP-IO)
3.1. Cartesian-Based TOPP-RA Method
3.1.1. Backward Pass
3.1.2. Forward Pass
3.2. Principle of the Proposed TOPP-IO Method
| Algorithm 1: An Iterative Optimal Method for TOPP |
Input: Geometric path in Cartesian space Output: Optimal trajectory information  |
3.3. Properties Discussion of Algorithm 1
4. Simulation and Real-World Experiment Results
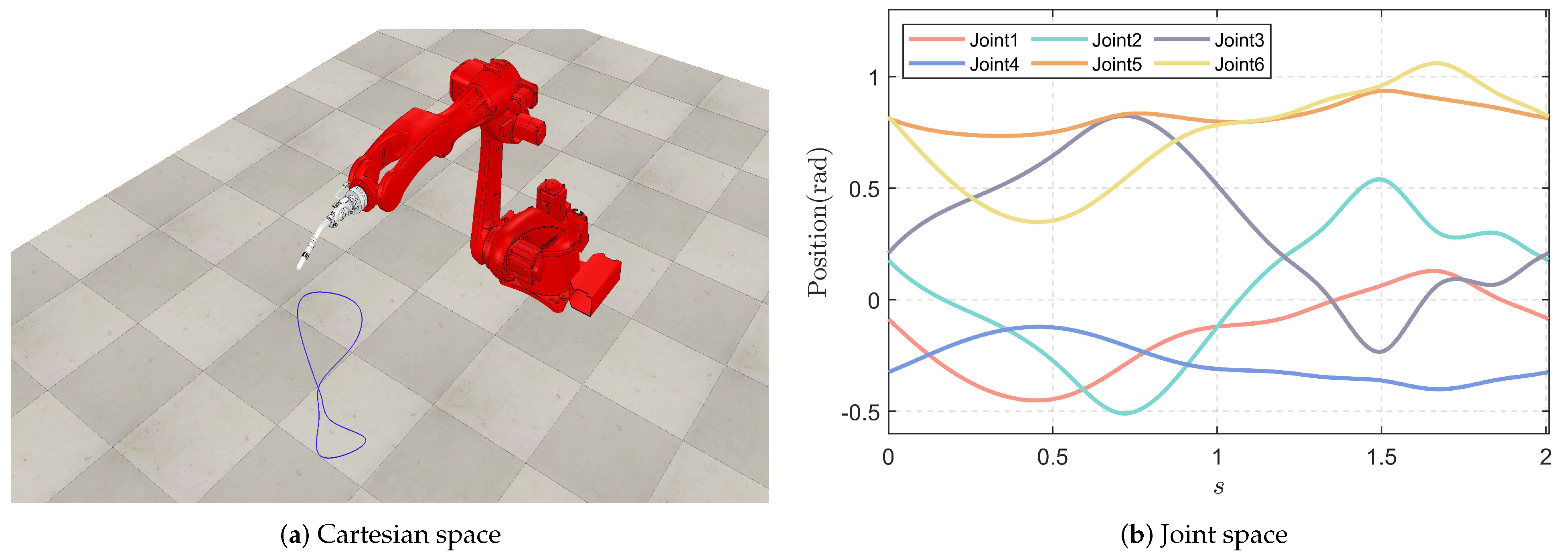
4.1. Experiment Settings
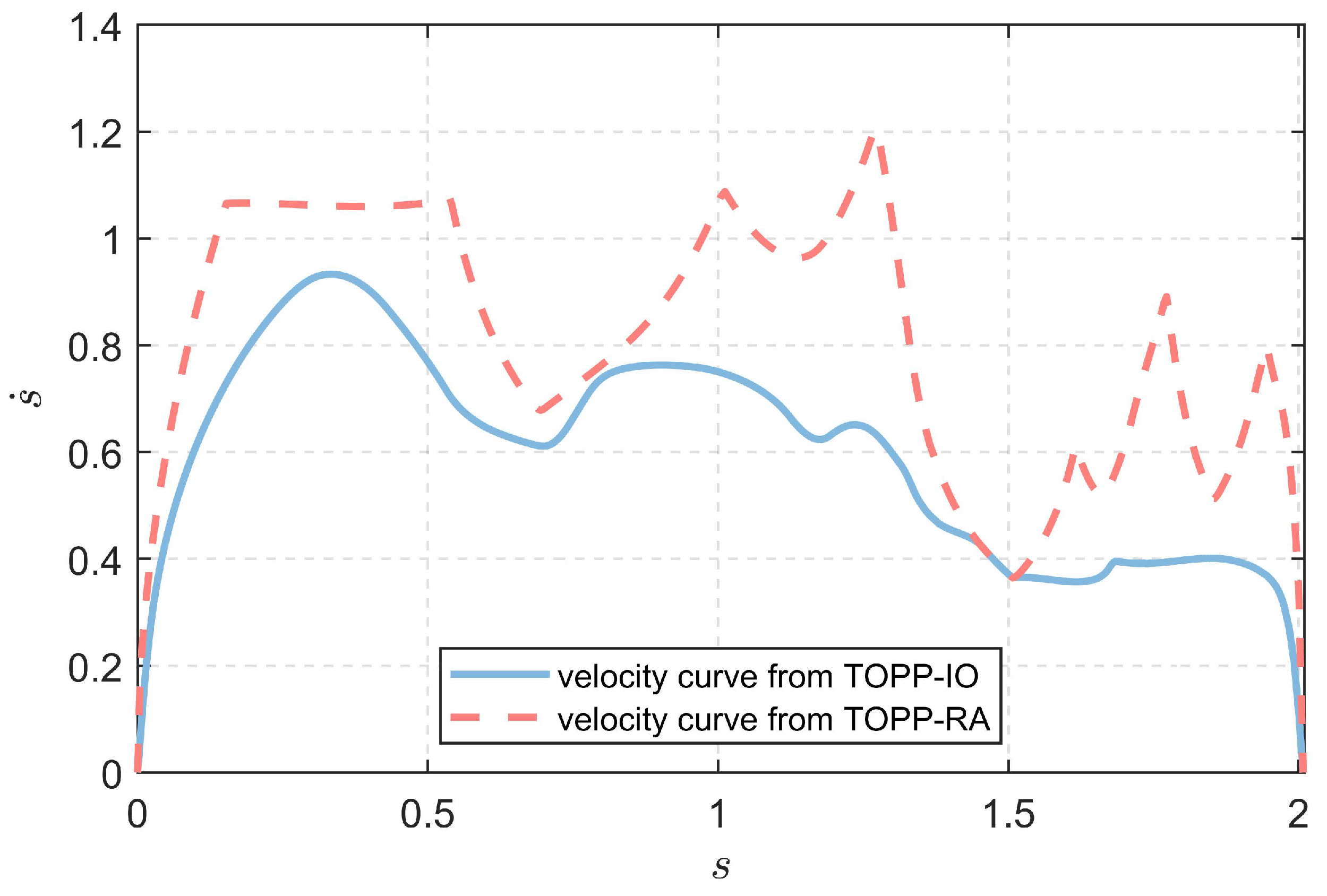
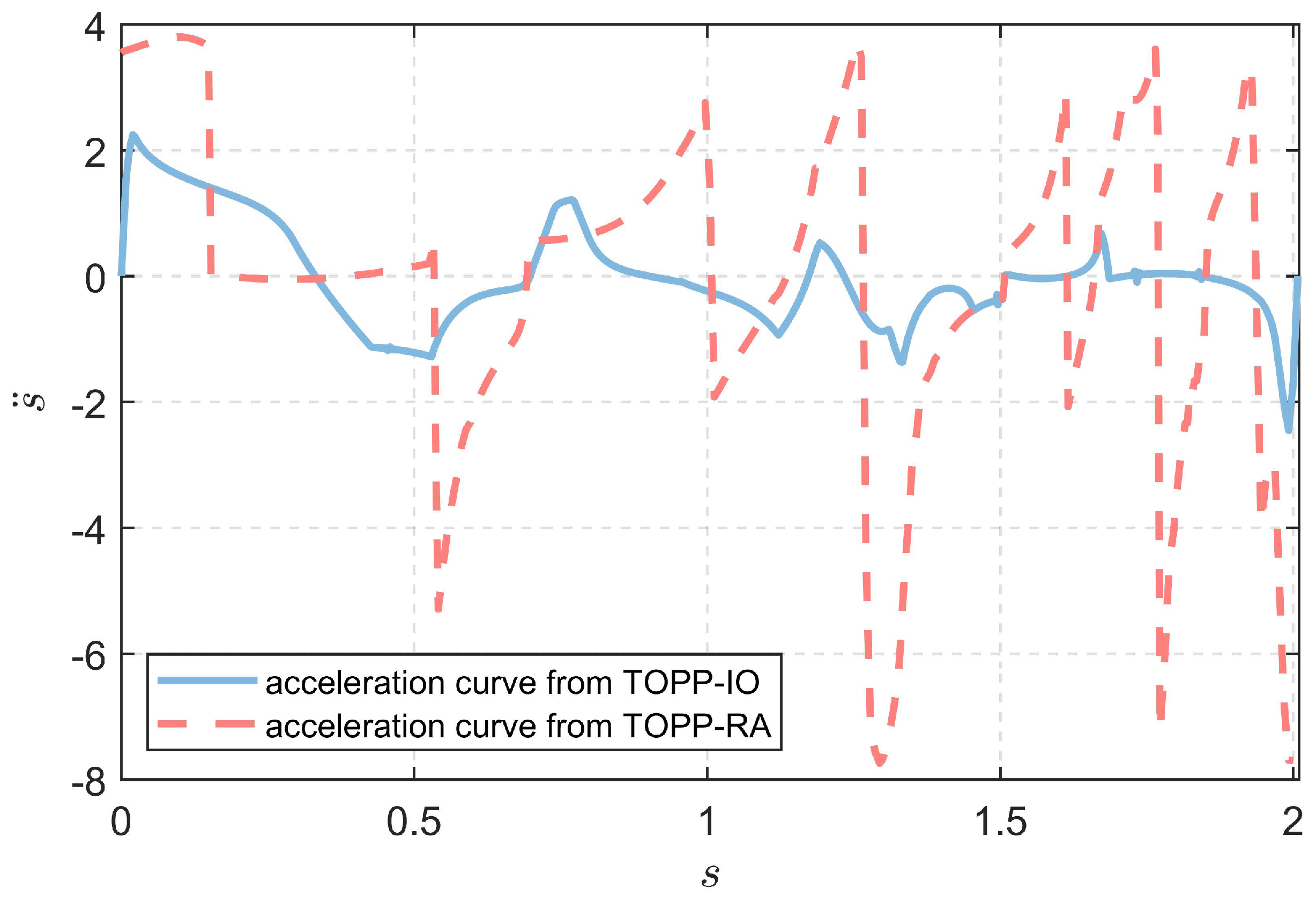
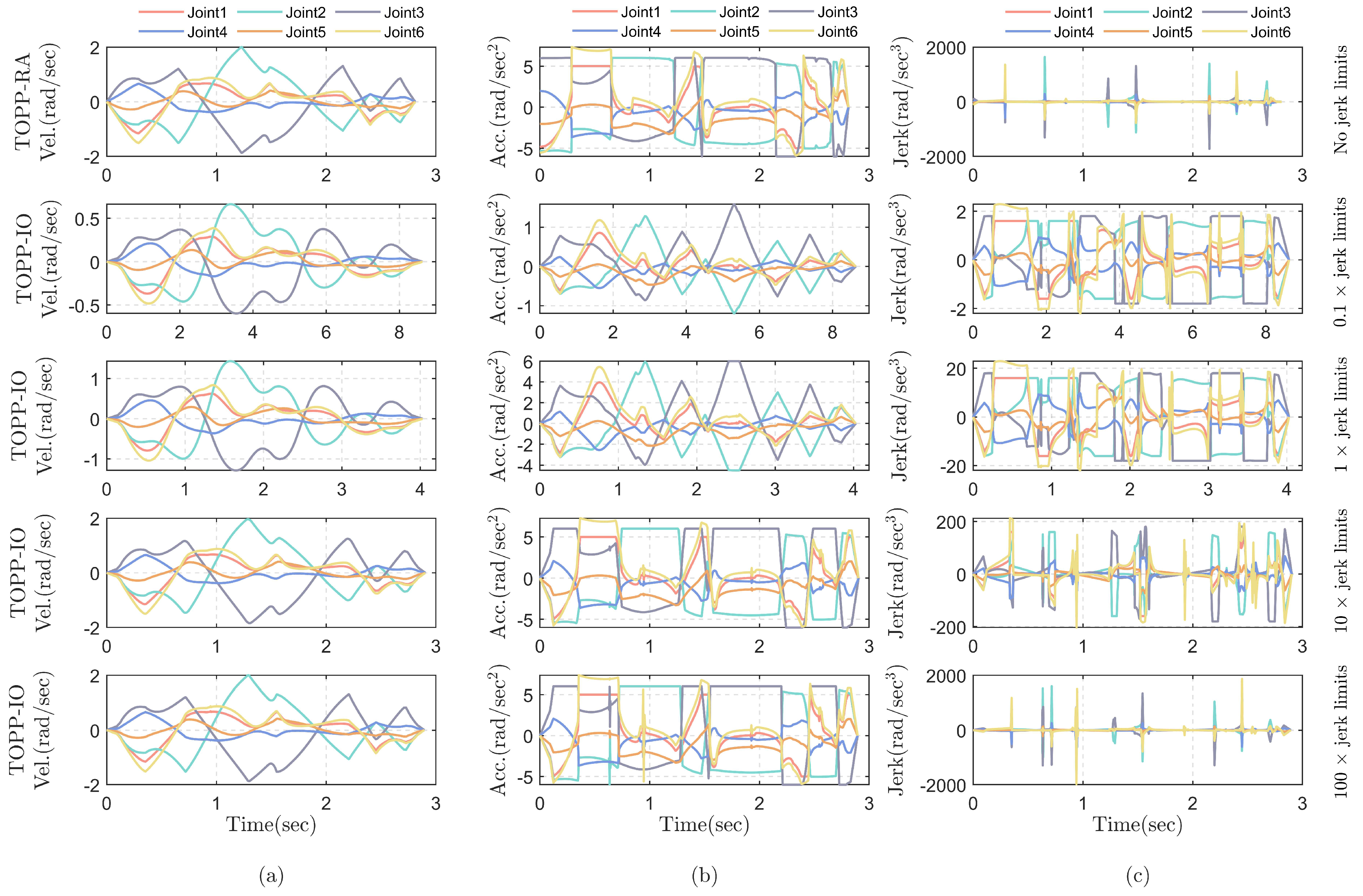
4.2. Comparison with TOPP-RA Method
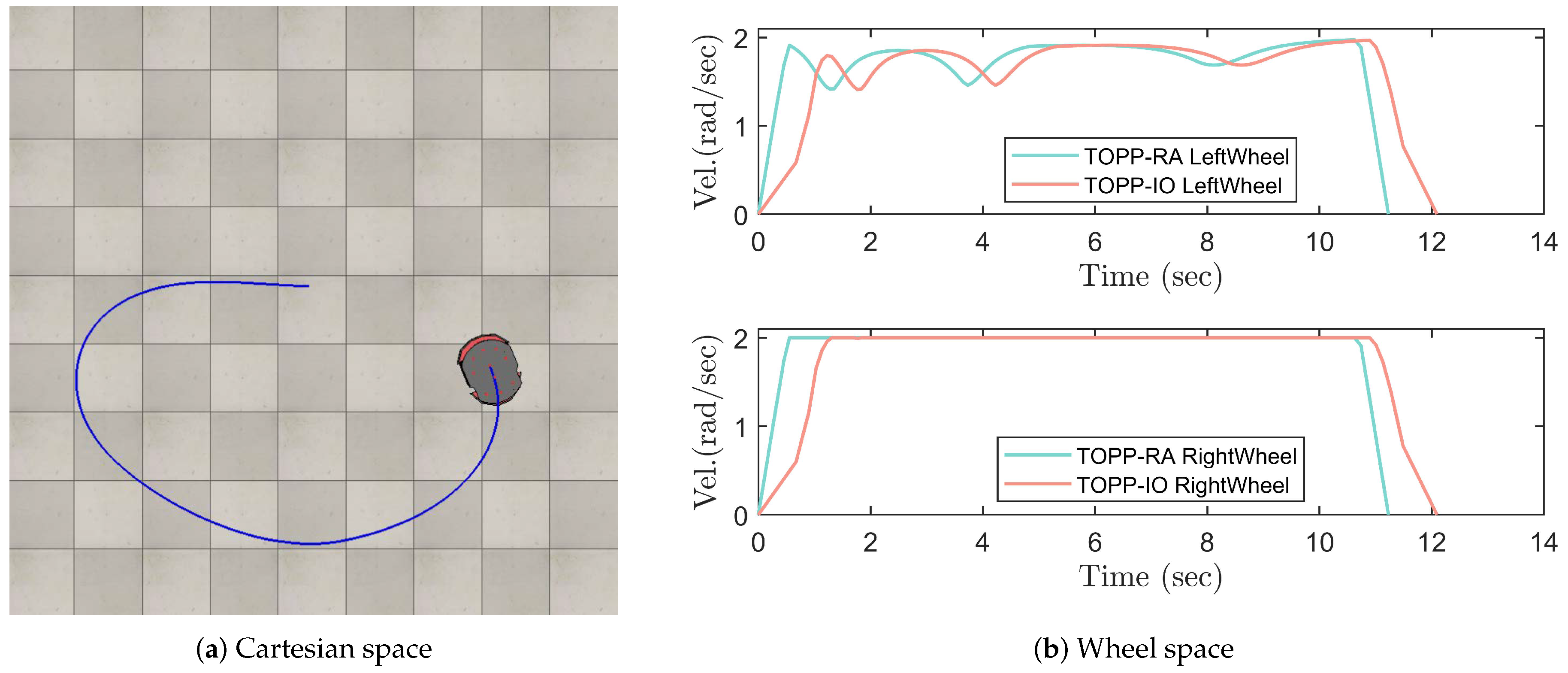
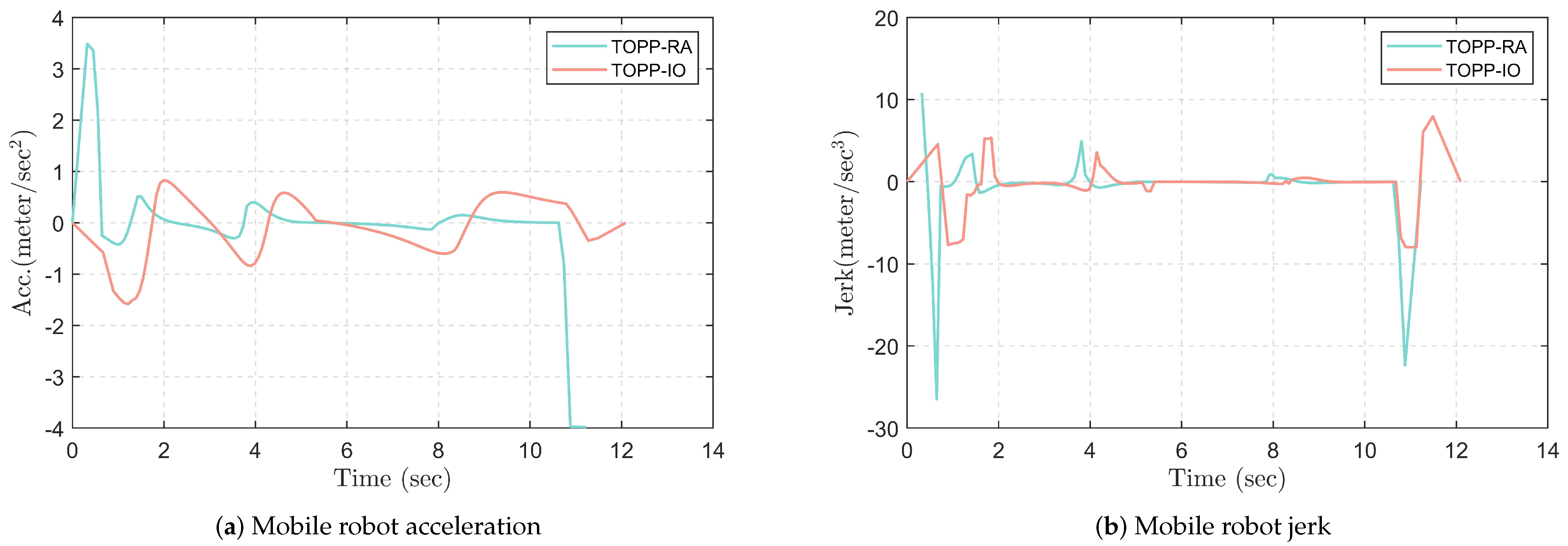
4.3. Application on Mobile Robot
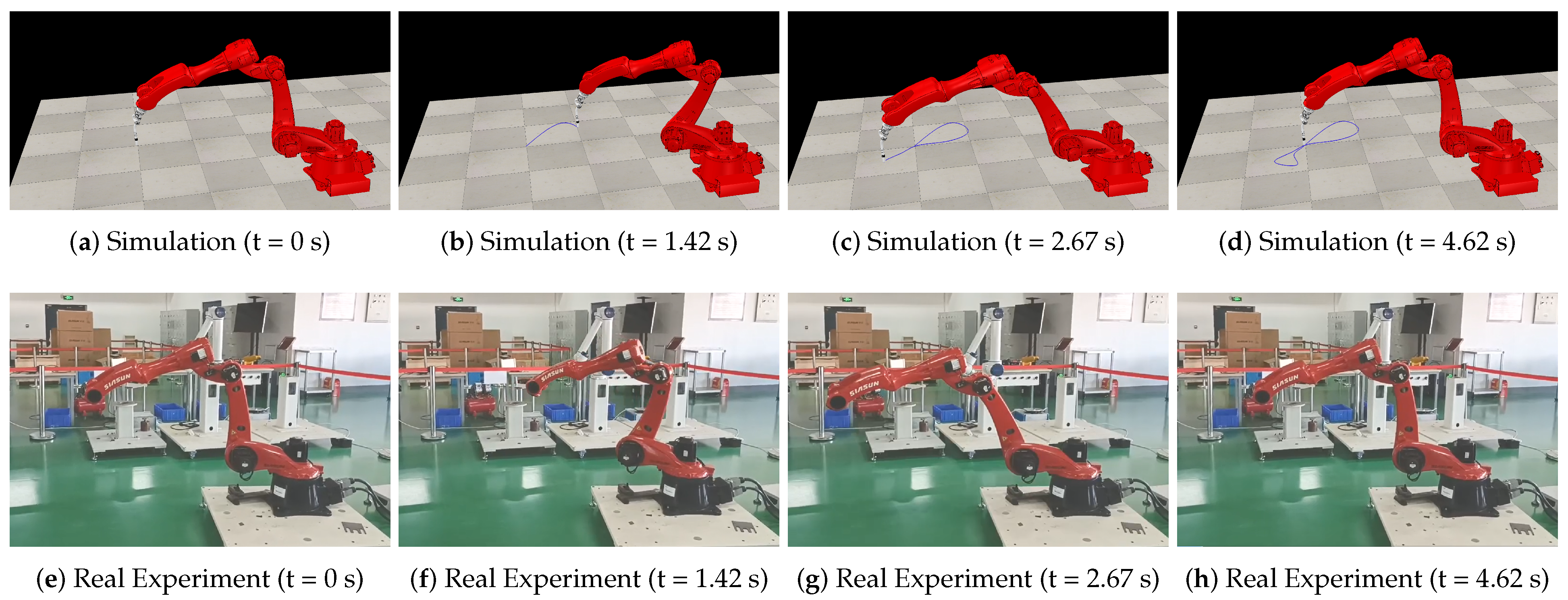
4.4. Real-World Experiments
5. Conclusions
- The framework is constructed from the bottom up in the Cartesian coordinate system and can be applied to both manipulator and mobile robots;
- Our study has identified two main challenges in the framework: how to consistently represent the TOTP problem in the Cartesian space using the phase plane, while imposing third-order kinematic constraints on each joint, and how to devise an efficient computational solution strategy that uses a constraint relaxation approach to simplify nonconvex constraints without violating them;
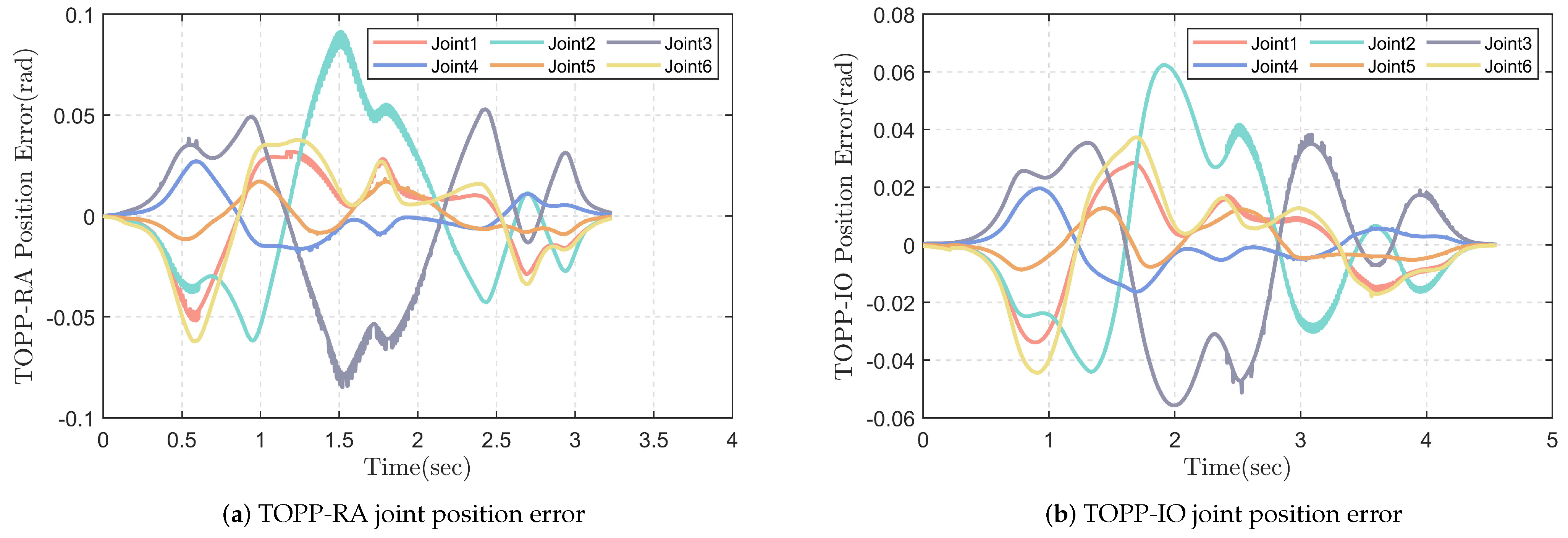
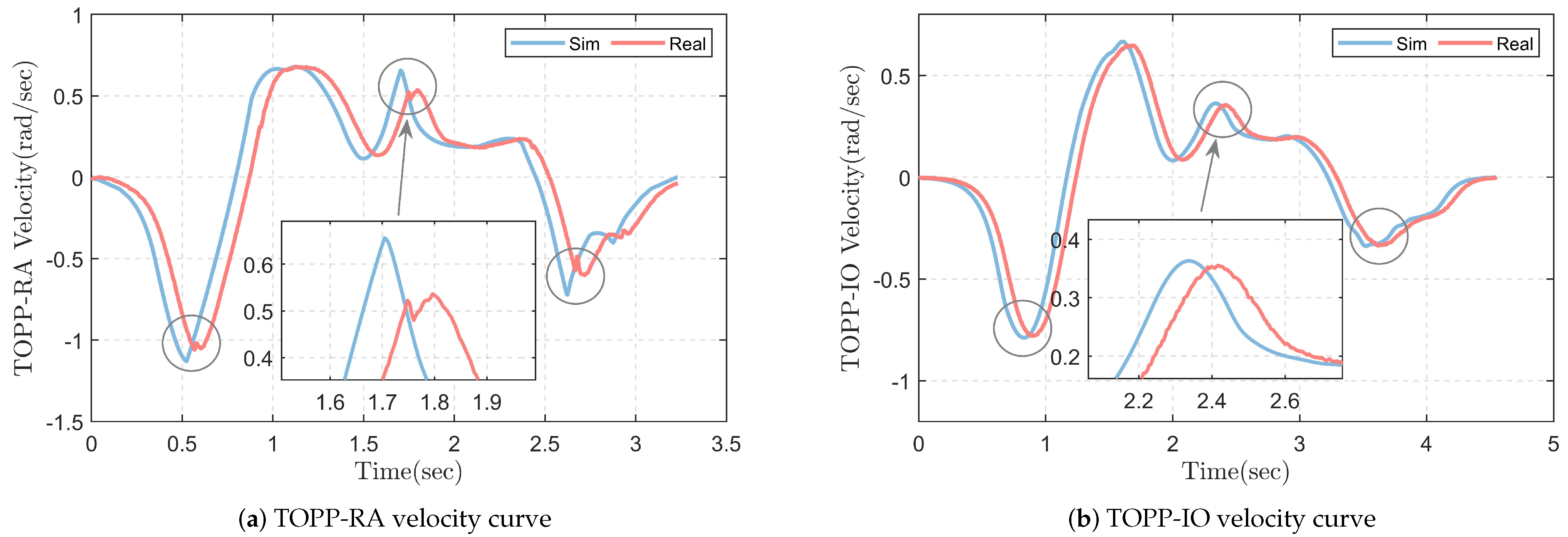
- We demonstrated the effectiveness of our proposed framework through both simulation and physical experiments. Compared to the TOPP-RA method, our approach effectively reduced the maximum absolute values of the robot’s jerk and the average absolute values of the position error over 60% and 29%, respectively. These are critical factors in ensuring smooth robotic velocity tracking and reducing impact during operation.
- First, we aim to extend our framework to handle both path planning and speed planning simultaneously, which will enable our method to generate feasible solutions more efficiently;
- Second, we plan to explore the potential of the constraint relaxation approaches and achieve real-time performance. Moreover, handling dynamic environments is a challenging and interesting area for future research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TOTP | time-optimal trajectory planning |
| TOPP | time-optimal path parameterization |
| NI | Numerical Integration |
| CO | Convex Optimization |
| DP | Dynamic Programming |
| DC | difference of convex |
| SCP | sequential convex programming |
| TOPP-RA | TOPP approach based on reachability analysis |
| TOPP-IO | TOPP approach based on iterative optimization |
| LP | linear programming |
| BA | bisection algorithm |
| NLP | nonlinear programming |
Appendix A. From Configuration Space to Cartesian Space
Appendix A.1. Forward and Inverse Kinematics
Appendix A.2. Explicit Expressions of High-Order Jacobian Derivatives
- (1)
- First-order path parameter derivative : The first-order derivative of Jacobian matrix with respect to the path parameter s is as following:The matrices and depend on the path parameter s, while is a function of the joint values , which can be obtained by forward and inverse kinematics. Each column of can be represented as an adjoint matrix, given by:According to the chain rule of differentiation, the first-order derivative of the geometric Jacobian matrix with respect to the path parameter s, denoted as , and its i-th column, denoted as , can be expressed as:In combination with the literature [35], can be calculated using as follows:
- (2)
- Second-order path parameter derivative : The second-order derivative of the Jacobian matrix with respect to the path parameter s is given by:According to the chain rule, the second-order path parameter derivative, , and its i-th column, , can be denoted as:whereand
References
- Mikolajczyk, T. Manufacturing Using Robot. Adv. Mater. Res. 2012, 463, 1643–1646. In Proceedings of the Advanced Materials Research II; Trans Tech Publications Ltd.: Baech, Switzerland, 2012. [Google Scholar] [CrossRef]
- Oztemel, E.; Gursev, S. Literature review of Industry 4.0 and related technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- Chiurazzi, M.; Alcaide, J.O.; Diodato, A.; Menciassi, A.; Ciuti, G. Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments. Sensors 2023, 23, 677. [Google Scholar] [CrossRef] [PubMed]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Trajectory Planning in Robotics. Math. Comput. Sci. 2012, 6, 269–279. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, M.; Zou, Y. Time-optimal and Smooth Trajectory Planning for Robot Manipulators. Int. J. Control. Autom. Syst. 2021, 19, 521–531. [Google Scholar] [CrossRef]
- Pham, H.; Pham, Q.-C. A New Approach to Time-Optimal Path Parameterization Based on Reachability Analysis. IEEE Trans. Robot. 2018, 34, 645–659. [Google Scholar] [CrossRef] [Green Version]
- Bobrow, J.E.; Dubowsky, S.; Gibson, J.S. Time-Optimal Control of Robotic Manipulators Along Specified Paths. Int. J. Robot. Res. 1985, 4, 3–17. [Google Scholar] [CrossRef]
- Kunz, T.; Stilman, M. Time-optimal trajectory generation for path following with bounded acceleration and velocity. In Robotics: Science and Systems VIII; The MIT Press: Cambridge, MA, USA; London, UK, 2012; pp. 1–8. [Google Scholar]
- Pham, Q.C. A General, Fast, and Robust Implementation of the Time-Optimal Path Parameterization Algorithm. IEEE Trans. Robot. 2014, 30, 1533–1540. [Google Scholar] [CrossRef] [Green Version]
- Pham, H.; Pham, Q.C. On the structure of the time-optimal path parameterization problem with third-order constraints. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 679–686. [Google Scholar] [CrossRef] [Green Version]
- Shen, P.; Zhang, X.; Fang, Y. Essential Properties of Numerical Integration for Time-Optimal Path-Constrained Trajectory Planning. IEEE Robot. Autom. Lett. 2017, 2, 888–895. [Google Scholar] [CrossRef] [Green Version]
- Shen, P.; Zhang, X.; Fang, Y. Complete and Time-Optimal Path-Constrained Trajectory Planning With Torque and Velocity Constraints: Theory and Applications. IEEE/ASME Trans. Mechatronics 2018, 23, 735–746. [Google Scholar] [CrossRef]
- Lu, L.; Zhang, J.; Fuh, J.Y.H.; Han, J.; Wang, H. Time-optimal tool motion planning with tool-tip kinematic constraints for robotic machining of sculptured surfaces. Robot.-Comput.-Integr. Manuf. 2020, 65, 101969. [Google Scholar] [CrossRef]
- Verscheure, D.; Demeulenäre, B.; Swevers, J.; De Schutter, J.; Diehl, M. Practical time-optimal trajectory planning for robots: A convex optimization approach. IEEE Trans. Autom. Control. 2008, 53, 1–10. [Google Scholar]
- Xiao, Y.; Dong, W.; Du, Z. A time-optimal trajectory planning approach based on calculation cost consideration. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1845–1850. [Google Scholar] [CrossRef]
- Debrouwere, F.; Van Loock, W.; Pipeleers, G.; Dinh, Q.T.; Diehl, M.; De Schutter, J.; Swevers, J. Time-Optimal Path Following for Robots With Convex-Concave Constraints Using Sequential Convex Programming. IEEE Trans. Robot. 2013, 29, 1485–1495. [Google Scholar] [CrossRef]
- Nagy, Á.; Vajk, I. Sequential Time-Optimal Path-Tracking Algorithm for Robots. IEEE Trans. Robot. 2019, 35, 1253–1259. [Google Scholar] [CrossRef]
- Ma, J.-w.; Gao, S.; Yan, H.-t.; Lv, Q.; Hu, G.-q. A new approach to time-optimal trajectory planning with torque and jerk limits for robot. Robot. Auton. Syst. 2021, 140, 103744. [Google Scholar] [CrossRef]
- Shin, K.; McKay, N. A dynamic programming approach to trajectory planning of robotic manipulators. IEEE Trans. Autom. Control. 1986, 31, 491–500. [Google Scholar] [CrossRef] [Green Version]
- Kaserer, D.; Gattringer, H.; Müller, A. Nearly Optimal Path Following with Jerk and Torque Rate Limits Using Dynamic Programming. IEEE Trans. Robot. 2019, 35, 521–528. [Google Scholar] [CrossRef]
- Kaserer, D.; Gattringer, H.; Müller, A. Time Optimal Motion Planning and Admittance Control for Cooperative Grasping. IEEE Robot. Autom. Lett. 2020, 5, 2216–2223. [Google Scholar] [CrossRef]
- Barnett, E.; Gosselin, C. A Bisection Algorithm for Time-Optimal Trajectory Planning Along Fully Specified Paths. IEEE Trans. Robot. 2021, 37, 131–145. [Google Scholar] [CrossRef]
- Faulwasser, T.; Findeisen, R. Nonlinear Model Predictive Control for Constrained Output Path Following. IEEE Trans. Autom. Control. 2016, 61, 1026–1039. [Google Scholar] [CrossRef] [Green Version]
- Consolini, L.; Locatelli, M.; Minari, A.; Piazzi, A. An optimal complexity algorithm for minimum-time velocity planning. Syst. Control. Lett. 2017, 103, 50–57. [Google Scholar] [CrossRef]
- Steinhauser, A.; Swevers, J. An Efficient Iterative Learning Approach to Time-Optimal Path Tracking for Industrial Robots. IEEE Trans. Ind. Inform. 2018, 14, 5200–5207. [Google Scholar] [CrossRef]
- Consolini, L.; Locatelli, M.; Minari, A. A Sequential Algorithm for Jerk Limited Speed Planning. IEEE Trans. Autom. Sci. Eng. 2022, 19, 3192–3209. [Google Scholar] [CrossRef]
- Petrone, V.; Ferrentino, E.; Chiacchio, P. Time-Optimal Trajectory Planning With Interaction With the Environment. IEEE Robot. Autom. Lett. 2022, 7, 10399–10405. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, H.z.; Li, S.h.; Zhang, L.l.; Yao, X.m. Time-optimal trajectory optimization of serial robotic manipulator with kinematic and dynamic limits based on improved particle swarm optimization. Int. J. Adv. Manuf. Technol. 2022, 120, 1253–1264. [Google Scholar] [CrossRef]
- Singh, S.; Leu, M.C. Optimal Trajectory Generation for Robotic Manipulators Using Dynamic Programming. J. Dyn. Syst. Meas. Control. 1987, 109, 88–96. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Yang, H.S. Improving the Efficiency of Time-Optimal Path-Following Algorithms. In Proceedings of the 1988 American Control Conference, Atlanta, GA, USA, 15–17 June 1988; pp. 2129–2134. [Google Scholar] [CrossRef]
- Consolini, L.; Locatelli, M.; Minari, A.; Nagy, Á.; Vajk, I. Optimal Time-Complexity Speed Planning for Robot Manipulators. IEEE Trans. Robot. 2019, 35, 790–797. [Google Scholar] [CrossRef]
- Li, B.; Ouyang, Y.; Li, L.; Zhang, Y. Autonomous Driving on Curvy Roads Without Reliance on Frenet Frame: A Cartesian-Based Trajectory Planning Method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15729–15741. [Google Scholar] [CrossRef]
- Guarino Lo Bianco, C.; Faroni, M.; Beschi, M.; Visioli, A. A Predictive Technique for the Real-Time Trajectory Scaling Under High-Order Constraints. IEEE/ASME Trans. Mechatronics 2022, 27, 315–326. [Google Scholar] [CrossRef]
- Andersson, J.A.E.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi—A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Fu, Z.; Spyrakos-Papastavridis, E.; Lin, Y.-H.; Dai, J.S. Analytical Expressions of Serial Manipulator Jacobians and their High-Order Derivatives based on Lie Theory. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 7095–7100. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Calculate Switch Points | Optimization Objectives (Simple, Multiple) | Achieve Optimal Point | Planning Space | Constraint Order (Second-Order, Third-Order) | |
|---|---|---|---|---|---|---|
| NI-based | [7,11,12] | Need | Simple | Yes | Joint/Cartesian | Second-order |
| [8,9] | Need | Simple | Yes | Joint | Second-order | |
| [10,13] | Need | Simple | Yes | Joint | Third-order | |
| CO-based | [6,17] | Not need | Simple | Yes | Joint | Third-order |
| [14,15] | Not need | Multiple | Yes | Joint/Cartesian | Second-order | |
| [16] | Not need | Multiple | Yes | Joint/Cartesian | Third-order (Limit) | |
| [18] | Need | Simple | Yes | Joint | Third-order (Limit) | |
| DP-based | [19,20] | Not need | Multiple | No | Joint | Third-order |
| [21] | Not need | Multiple | No | Joint/Cartesian | Third-order | |
| [22] | Not need | Multiple | No | Joint | Second-order | |
| Ours | Not need | Multiple | Yes | Joint/Cartesian | Third-order |
| Hyperparameter | Description | Value |
|---|---|---|
| Maximum iteration number | 5 | |
| initial value | 10 | |
| Multiplier to enlarge | 10 | |
| Softened constraints tolerance | 16 |
| Limits | Joint1 | Joint2 | Joint3 | Joint4 | Joint5 | Joint6 |
|---|---|---|---|---|---|---|
| Vel. (rad/s) | 2 | 2 | 2 | 4 | 4 | 4 |
| Acc. (rad/s) | 5 | 6 | 6 | 12 | 12 | 12 |
| Jerk (rad/s) | 16 | 16 | 18 | 20 | 28 | 28 |
| Method | TOPP-RA | TOPP-IO | |||
|---|---|---|---|---|---|
| Jerk Limits (rad/s) | - | 100× | 10× | 1× | 0.1× |
| t (s) | 2.81067 | 2.89393 | 2.90326 | 4.02941 | 8.63447 |
| Limits | Wheel1 | Wheel2 |
|---|---|---|
| Vel. (rad/s) | 2 | 2 |
| Acc. (rad/s) | 4 | 4 |
| Jerk (rad/s) | 8 | 8 |
| Acceleration (m/s2) | Jerk (m/s3) | |
|---|---|---|
| TOPP-RA | 3.98086 | 26.4858 |
| TOPP-IO | 1.58118 | 7.9937 |
| Degree of decline | 60.28% | 69.82% |
| Joint1 | Joint2 | Joint3 | Joint4 | Joint5 | Joint6 | ||
|---|---|---|---|---|---|---|---|
| Average position error | TOPP-RA (rad) | 0.0160 | 0.0296 | 0.0293 | 0.0075 | 0.0066 | 0.0192 |
| TOPP-IO (rad) | 0.0112 | 0.0205 | 0.0206 | 0.0053 | 0.0047 | 0.0135 | |
| Degree of decline | 30.13% | 30.67% | 29.81% | 29.60% | 29.65% | 29.46% | |
| Maximum position error | TOPP-RA (rad) | 0.0518 | 0.0911 | 0.0849 | 0.0270 | 0.0183 | 0.0621 |
| TOPP-IO (rad) | 0.0339 | 0.0624 | 0.0557 | 0.0196 | 0.0127 | 0.0444 | |
| Degree of decline | 34.63% | 31.54% | 34.36% | 27.62% | 30.36% | 28.47% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Z.; Jia, K.; Zhang, L.; Zou, F.; Du, Z.; Liu, M.; Cao, Y.; Zhang, Q. A Cartesian-Based Trajectory Optimization with Jerk Constraints for a Robot. Entropy 2023, 25, 610. https://doi.org/10.3390/e25040610
Fan Z, Jia K, Zhang L, Zou F, Du Z, Liu M, Cao Y, Zhang Q. A Cartesian-Based Trajectory Optimization with Jerk Constraints for a Robot. Entropy. 2023; 25(4):610. https://doi.org/10.3390/e25040610
Chicago/Turabian StyleFan, Zhiwei, Kai Jia, Lei Zhang, Fengshan Zou, Zhenjun Du, Mingmin Liu, Yuting Cao, and Qiang Zhang. 2023. "A Cartesian-Based Trajectory Optimization with Jerk Constraints for a Robot" Entropy 25, no. 4: 610. https://doi.org/10.3390/e25040610