
An Order Reduction Design Framework for Higher-Order Binary Markov Random Fields

Abstract
:1. Introduction
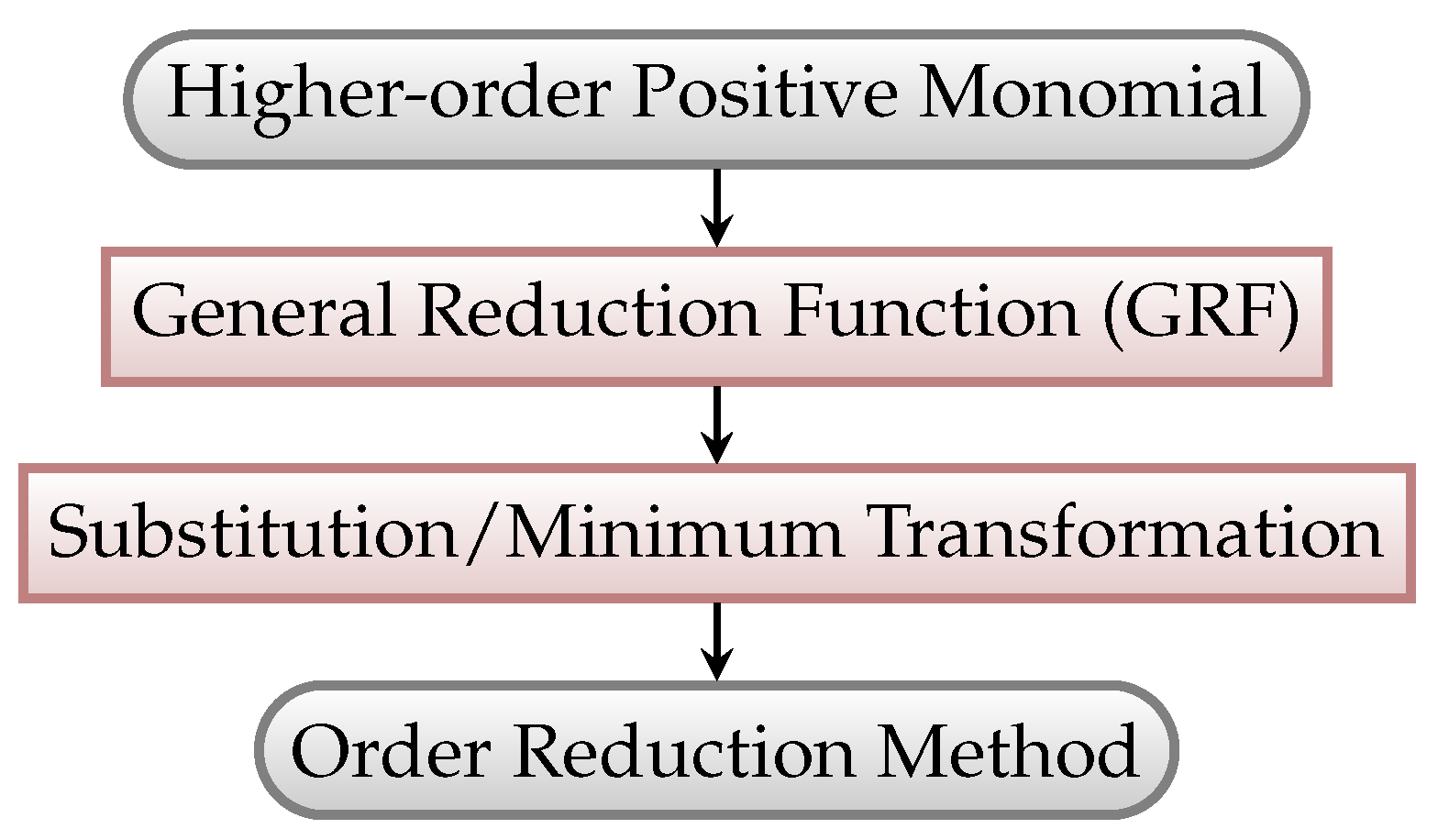
- We propose an order reduction design framework that divides the complex design of order reduction methods into two simpler processes. Compared with existing works, our framework significantly decreases the design difficulty for order reduction methods.
- A novel GRF is developed to generalize previous order reduction methods. Unlike the previous methods with multiple binary auxiliary variables, GRF utilizes an integral auxiliary variable. Some valuable properties of GRF are also rigorously proved.
- Two sets of substitution and minimum transformations are developed to produce more order reduction methods. A variety of 14 order reduction methods are produced to enable applications in different fields to choose their most suitable method. Moreover, four state-of-the-art order reduction methods can be easily derived from our work.
2. Notation and Related Work
2.1. Higher-Order Binary Markov Random Field
2.2. Related Works of Order Reduction Methods
3. The First Process of the Proposed Framework: General Reduction Function (GRF)
3.1. General Reduction Function (GRF)
- Let . Then, the general reduction type-1 (GR-1) method iswhere is the 2-norm, is a large number and the indicator function .
- Let . Then, the general reduction type-2 (GR-2) method is
- Let . Then, the general reduction type-3 (GR-3) method is
3.2. Properties of GRF
- 1.
- and ;
- 2.
- ;
- 3.
- .
- 1.
- Prove that . Based on the definition of , . If , then . According to Equation (13), . Thus, .
- 2.
- Prove that . Since , if , then . According to Equation (13), . Suppose an integral such thatSimilarly, if , then . When , we haveAccording to Equation (13), the above inequality isSince , and , the above inequality is transformed as
- 3.
- Prove that . We prove this case by contradiction. Suppose such that and . We discuss it in two cases according to the value of k.
- (a)
- If , then . According to Equation (13), we havewhere . Since and , then , contradicting the assumption that .
- (b)
- If , then . Suppose such thatDirectly from the definition of , we can writeSince , , and , we havewhich contradicts the fact that . Therefore, .
- 4.
- Prove that . We prove this case by contradiction. Suppose that . Based on the definition of and Equation (13), there exists such thatIn other words,If , it contradicts the fact that ; if , then that cannot be equal to , contradicting the definition of . Thus, .
4. The Second Process of the Proposed Framework: Transformation from GRF to RF
4.1. Substitution Transformation
4.2. Minimum Transformation
5. Experiments and Discussions
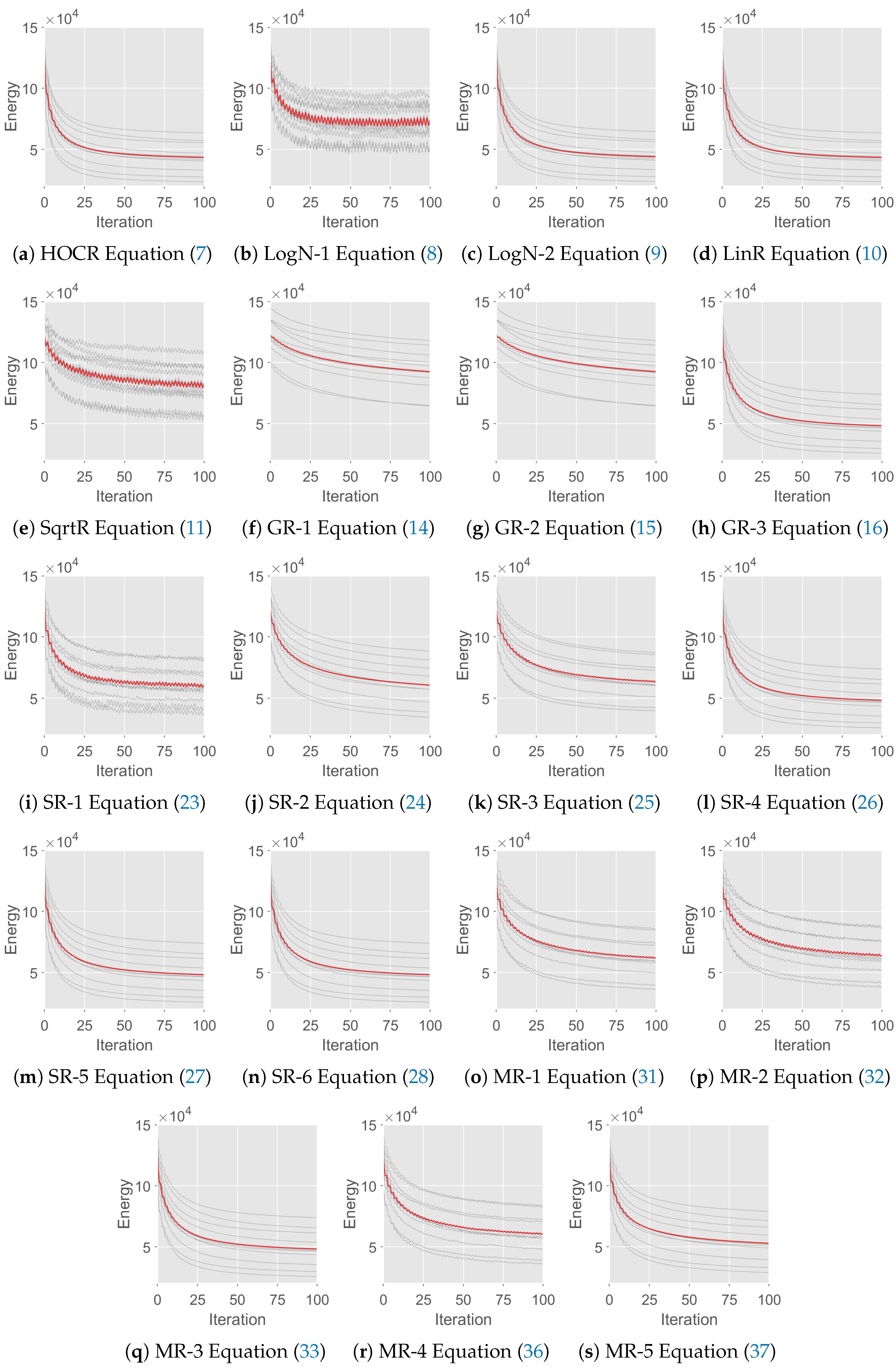
5.1. Synthetic Data Experiments
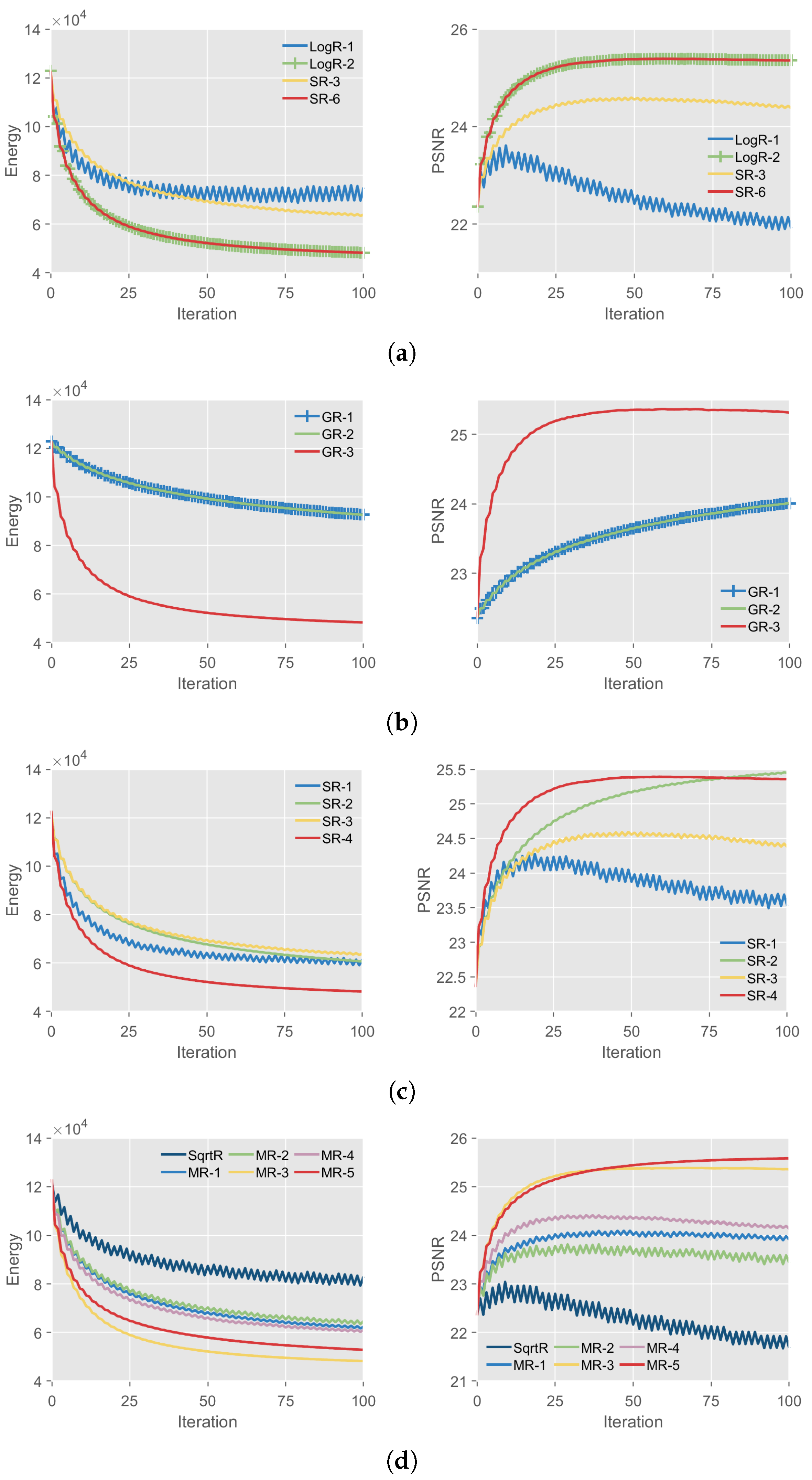
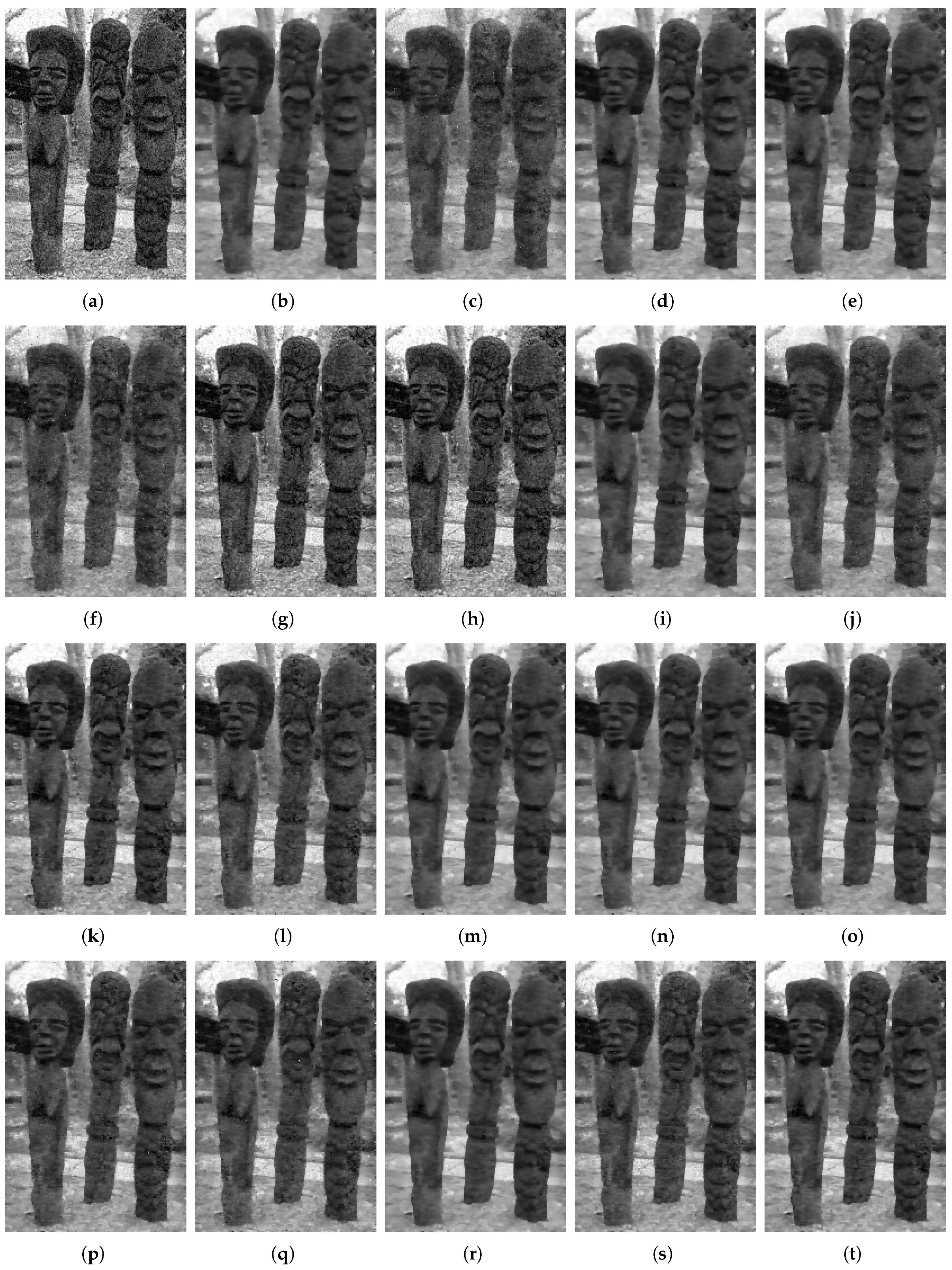
5.2. Image Denoising
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Ishikawa, H. Higher-order clique reduction in binary graph cut. In Proceedings of the CVPR, Miami, FL, USA, 20–25 June 2009; pp. 2993–3000. [Google Scholar]
- Ishikawa, H. Transformation of general binary MRF minimization to the first-order case. IEEE TPAMI 2011, 33, 1234–1249. [Google Scholar] [CrossRef] [Green Version]
- Fix, A.; Gruber, A.; Boros, E.; Zabih, R. A graph cut algorithm for higher-order Markov Random Fields. In Proceedings of the ICCV, Barcelona, Spain, 6–13 November 2011; pp. 1020–1027. [Google Scholar]
- Fix, A.; Gruber, A.; Boros, E.; Zabih, R. A Hypergraph-Based Reduction for Higher-Order Binary Markov Random Fields. IEEE TPAMI 2015, 37, 1387–1395. [Google Scholar] [CrossRef]
- Shen, J.; Peng, J.; Dong, X.; Shao, L.; Porikli, F. Higher Order Energies for Image Segmentation. IEEE TIP 2017, 26, 4911–4922. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Messaoud, S.; Kumar, M.; Schwing, A.G. Can We Learn Heuristics for Graphical Model Inference Using Reinforcement Learning? In Proceedings of the CVPR, Seattle, WA, USA, 14–19 June 2020; pp. 7586–7596. [Google Scholar]
- Shen, R.; Tang, B.; Lodi, A.; Tramontani, A.; Ayed, I.B. An ILP Model for Multi-Label MRFs With Connectivity Constraints. IEEE TIP 2020, 29, 6909–6917. [Google Scholar] [CrossRef]
- Cofré, R.; Maldonado, C. Information Entropy Production of Maximum Entropy Markov Chains from Spike Trains. Entropy 2018, 20, 34. [Google Scholar] [CrossRef] [Green Version]
- Auzina, I.A.; Tomczak, J.M. Approximate Bayesian Computation for Discrete Spaces. Entropy 2021, 23, 312. [Google Scholar] [CrossRef]
- Romanov, E.; Ordentlich, O. On Compressed Sensing of Binary Signals for the Unsourced Random Access Channel. Entropy 2021, 23, 605. [Google Scholar] [CrossRef]
- Sioofy Khoojine, A.; Shadabfar, M.; Edrisi Tabriz, Y. A Mutual Information-Based Network Autoregressive Model for Crude Oil Price Forecasting Using Open-High-Low-Close Prices. Mathematics 2022, 10, 3172. [Google Scholar] [CrossRef]
- Yarkoni, S.; Raponi, E.; Bäck, T.; Schmitt, S. Quantum Annealing for Industry Applications: Introduction and Review. Rep. Prog. Phys. 2022, 85, 104001. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Wang, X.; Dong, B. Quantum computing for future real-time building HVAC controls. Appl. Energy 2023, 334, 120621. [Google Scholar] [CrossRef]
- Calude, C.S.; Heidari, S.; Sifakis, J. What perceptron neural networks are (not) good for? Inf. Sci. 2023, 621, 844–857. [Google Scholar] [CrossRef]
- Freedman, D.; Drineas, P. Energy minimization via graph cuts: Settling what is possible. In Proceedings of the CVPR, San Diego, CA, USA, 20–26 June 2005; Volume 2, pp. 939–946. [Google Scholar]
- Gruber, A. Algorithmic and Complexity Results for Boolean and Pseudo-Boolean Functions. Ph.D. Thesis, New Brunswick Rutgers, The State University of New Jersey, New Brunswick, NJ, USA, 2015. [Google Scholar]
- Anthony, M.; Boros, E.; Crama, Y.; Gruber, A. Quadratization of symmetric pseudo-Boolean functions. Discret. Appl. Math. 2016, 203, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Anthony, M.; Boros, E.; Crama, Y.; Gruber, A. Quadratic reformulations of nonlinear binary optimization problems. Math. Program. 2017, 162, 115–144. [Google Scholar] [CrossRef] [Green Version]
- Boros, E.; Hammer, P.L. Pseudo-boolean optimization. Discret. Appl. Math. 2002, 123, 155–225. [Google Scholar] [CrossRef] [Green Version]
- Yip, K.W.; Xu, H.; Koenig, S.; Kumar, T.K.S. Quadratic Reformulation of Nonlinear Pseudo-Boolean Functions via the Constraint Composite Graph. In Integration of Constraint Programming, Artificial Intelligence, and Operations Research: 16th International Conference, CPAIOR 2019, Proceedings 16, Thessaloniki, Greece, 4–7 June 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 643–660. [Google Scholar]
- Boros, E.; Crama, Y.; Rodríguez-Heck, E. Quadratizations of symmetric pseudo-Boolean functions: Sub-linear bounds on the number of auxiliary variables. In Proceedings of the International Symposium on Artificial Intelligence and Mathematics, Fort Lauderdale, FL, USA, 3–5 January 2018. [Google Scholar]
- Boros, E.; Crama, Y.; Rodríguez-Heck, E. Compact quadratizations for pseudo-Boolean functions. J. Comb. Optim. 2020, 39, 687–707. [Google Scholar] [CrossRef]
- Boykov, Y.; Veksler, O.; Zabih, R. Fast approximate energy minimization via graph cuts. IEEE TPAMI 2001, 23, 1222–1239. [Google Scholar] [CrossRef] [Green Version]
- Lempitsky, V.; Rother, C.; Blake, A. LogCut—Efficient Graph Cut Optimization for Markov Random Fields. In Proceedings of the ICCV, Rio De Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Lempitsky, V.S.; Rother, C.; Roth, S.; Blake, A. Fusion Moves for Markov Random Field Optimization. IEEE TPAMI 2010, 32, 1392–1405. [Google Scholar] [CrossRef]
- Schlesinger, D.; FLACH, B. Transforming an Arbitrary Minsum Problem into a Binary One; Technical Report TUD-FI06-01; Dresden University of Technology: Dresden, Germany, 2006. [Google Scholar]
- Verma, A.; Lewis, M. Optimal quadratic reformulations of fourth degree Pseudo-Boolean functions. Optim. Lett. 2020, 14, 1557–1569. [Google Scholar] [CrossRef]
- Kolmogorov, V.; Zabin, R. What energy functions can be minimized via graph cuts. IEEE TPAMI 2004, 26, 147–159. [Google Scholar] [CrossRef] [Green Version]
- Rosenberg, I.G. Reduction of bivalent maximization to the quadratic case. Cah. Cent. Tudes Rech. OpéR 1975, 17, 71–74. [Google Scholar]
- Bardet, M. On the Complexity of a Grobner Basis Algorithm. In Proceedings of the Algorithms Seminar, Le Chesnay-Rocquencourt, France, 25 November 2002; pp. 85–92. [Google Scholar]
- Ishikawa, H. Higher-Order Clique Reduction without Auxiliary Variables. In Proceedings of the CVPR, Columbus, OH, USA, 23–28 June 2014; pp. 1362–1369. [Google Scholar]
- Tanburn, R.; Lunt, O.; Dattani, N.S. Crushing runtimes in adiabatic quantum computation with Energy Landscape Manipulation (ELM): Application to Quantum Factoring. arXiv 2015, arXiv:1510.07420. [Google Scholar]
- Tanburn, R.; Okada, E.; Dattani, N. Reducing multi-qubit interactions in adiabatic quantum computation without adding auxiliary qubits. Part 1: The ’deduc-reduc’ method and its application to quantum factorization of numbers. arXiv 2015, arXiv:1508.04816. [Google Scholar]
- Okada, E.; Tanburn, R.; Dattani, N.S. Reducing multi-qubit interactions in adiabatic quantum computation without adding auxiliary qubits. Part 2: The ’split-reduc’ method and its application to quantum determination of Ramsey numbers. arXiv 2015, arXiv:1508.07190. [Google Scholar]
- Andres, B.; Di Gregorio, S.; Irmai, J.; Lange, J.H. A polyhedral study of lifted multicuts. Discret. Optim. 2023, 47, 100757. [Google Scholar] [CrossRef]
- Arora, C.; Banerjee, S.; Kalra, P.; Maheshwari, S.N. Generic Cuts: An Efficient Algorithm for Optimal Inference in Higher Order MRF-MAP. In Proceedings of the ECCV, Florence, Italy, 7–13 October 2012; pp. 17–30. [Google Scholar]
- Arora, C.; Banerjee, S.; Kalra, P.K.; Maheshwari, S. Generalized Flows for Optimal Inference in Higher Order MRF-MAP. IEEE TPAMI 2015, 37, 1323–1335. [Google Scholar] [CrossRef] [PubMed]
- Shanu, I.; Arora, C.; Maheshwari, S. Inference in Higher Order MRF-MAP Problems with Small and Large Cliques. In Proceedings of the CVPR, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7883–7891. [Google Scholar]
- Shanu, I.; Bharti, S.; Arora, C.; Maheshwari, S.N. An Inference Algorithm for Multi-label MRF-MAP Problems with Clique Size 100. In Proceedings of the ECCV, Glasgow, UK, 23–28 August 2020; pp. 257–274. [Google Scholar]
- Kahl, F.; Strandmark, P. Generalized roof duality for pseudo-boolean optimization. In Proceedings of the ICCV, Barcelona, Spain, 6–13 November 2011; pp. 255–262. [Google Scholar]
- Kannan, H.; Komodakis, N.; Paragios, N. Newton-Type Methods for Inference in Higher-Order Markov Random Fields. In Proceedings of the CVPR, Honolulu, HI, USA, 21–26 July 2017; pp. 7224–7233. [Google Scholar]
- Ke, C.; Honorio, J. Exact Inference in High-order Structured Prediction. arXiv 2023, arXiv:2302.03236. [Google Scholar]
- Elloumi, S.; Lambert, A.; Lazare, A. Solving unconstrained 0-1 polynomial programs through quadratic convex reformulation. J. Glob. Optim. 2021, 80, 231–248. [Google Scholar] [CrossRef]
- Kolmogorov, V. Convergent tree-reweighted message passing for energy minimization. IEEE TPAMI 2006, 28, 1568–1583. [Google Scholar] [CrossRef] [PubMed]
- Kolmogorov, V. A New Look at Reweighted Message Passing. IEEE TPAMI 2015, 37, 919–930. [Google Scholar] [CrossRef] [Green Version]
- Gallagher, A.C.; Batra, D.; Parikh, D. Inference for order reduction in Markov random fields. In Proceedings of the CVPR, Colorado Springs, CO, USA, 20–25 June 2011; pp. 1857–1864. [Google Scholar]
- Roth, S.; Black, M.J. Fields of Experts: A framework for learning image priors. In Proceedings of the CVPR, San Diego, CA, USA, 20–26 June 2005; Volume 2, pp. 860–867. [Google Scholar]
- Roth, S.; Black, M.J. Fields of Experts. IJCV 2009, 82, 205–229. [Google Scholar] [CrossRef]
- Arbelaez, P.A.; Maire, M.; Fowlkes, C.C.; Malik, J. Contour Detection and Hierarchical Image Segmentation. IEEE TPAMI 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | GRF | Transformation | Number of Auxiliary Variables | Type of Auxiliary Variables |
|---|---|---|---|---|
| GR-1 Equation (14) | (14) | None | Integral | |
| GR-2 Equation (15) | (15) | None | Integral | |
| GR-3 Equation (16) | (16) | None | Integral | |
| SR-1 Equation (23) | (15) | (20) | Binary | |
| SR-2 Equation (24) | (15) | (21) | Binary | |
| SR-3 Equation (25) | (15) | (22) | Binary | |
| SR-4 Equation (26) | (16) | (20) | Binary | |
| SR-5 Equation (27) | (16) | (21) | Binary | |
| SR-6 Equation (28) | (16) | (22) | Binary | |
| MR-1 Equation (31) | (14) | (30) | Binary | |
| MR-2 Equation (32) | (15) | (30) | Binary | |
| MR-3 Equation (33) | (16) | (30) | Binary | |
| MR-4 Equation (36) | (15) | (34) | Binary | |
| MR-5 Equation (37) | (16) | (34) | Binary |
| Methods | 3rd-Order | 4th-Order | 5th-Order | 6th-Order | 7th-Order |
|---|---|---|---|---|---|
| HOCR Equation (7) | −9.98 | −10.03 | −13.04 | −15.72 | −19.22 |
| LogR-1 Equation (8) | −6.22 | −3.72 | −3.21 | −6.53 | −7.49 |
| LogR-2 Equation (9) | −8.82 | −10.03 | −10.12 | −8.98 | −9.99 |
| LinR Equation (10) | −9.98 | −10.03 | −10.10 | −10.30 | −11.89 |
| SqrtR Equation (11) | −2.89 | −3.46 | −5.08 | −6.82 | −8.45 |
| GR-1 Equation (14) | −0.59 | −0.16 | −0.06 | −0.02 | −0.01 |
| GR-2 Equation (15) | −0.59 | −0.16 | −0.06 | −0.02 | −0.01 |
| GR-3 Equation (16) | −7.92 | −10.21 | −10.99 | −15.41 | −17.17 |
| SR-1 Equation (23) | −6.19 | −5.38 | −6.16 | −6.73 | −7.56 |
| SR-2 Equation (24) | −4.86 | −4.85 | −5.76 | −7.15 | −6.94 |
| SR-3 Equation (25) | −4.19 | −3.72 | −7.91 | −8.30 | −8.68 |
| SR-4 Equation (26) | −8.82 | −10.03 | −7.72 | −10.3 | −7.95 |
| SR-5 Equation (27) | −8.82 | −10.03 | −10.02 | −14.35 | −11.79 |
| SR-6 Equation (28) | −8.82 | −10.03 | −6.73 | −10.22 | −9.99 |
| MR-1 Equation (31) | −6.01 | −6.35 | −8.89 | −12.18 | −14.56 |
| MR-2 Equation (32) | −5.95 | −6.53 | −8.97 | −11.75 | −14.46 |
| MR-3 Equation (33) | −9.98 | −10.03 | −13.04 | −15.72 | −19.22 |
| MR-4 Equation (36) | −5.19 | −4.22 | −7.84 | −9.34 | −8.49 |
| MR-5 Equation (37) | −6.68 | −8.93 | −9.08 | −11.59 | −12.01 |
| Methods | 3rd-Order | 4th-Order | 5th-Order | 6th-Order | 7th-Order |
|---|---|---|---|---|---|
| HOCR Equation (7) | −4.11 | −4.00 | −4.86 | −5.74 | −6.88 |
| LogR-1 Equation (8) | −2.61 | −1.44 | −1.28 | −2.68 | −3.28 |
| LogR-2 Equation (9) | −3.52 | −4.00 | −4.18 | −3.69 | −4.10 |
| LinR Equation (10) | −4.11 | −4.00 | −3.81 | −3.75 | −4.37 |
| SqrtR Equation (11) | −1.12 | −1.39 | −2.20 | −3.09 | −3.96 |
| GR-1 Equation (14) | −0.18 | −0.05 | −0.01 | −0.01 | 0.00 |
| GR-2 Equation (15) | −0.18 | −0.05 | −0.01 | −0.01 | 0.00 |
| GR-3 Equation (16) | −3.24 | −4.05 | −4.13 | −5.52 | −6.15 |
| SR-1 Equation (23) | −2.57 | −2.11 | −2.22 | −2.24 | −2.36 |
| SR-2 Equation (24) | −1.91 | −1.86 | −2.21 | −2.67 | −2.66 |
| SR-3 Equation (25) | −1.67 | −1.44 | −3.26 | −3.55 | −3.78 |
| SR-4 Equation (26) | −3.52 | −4.00 | −2.76 | −3.75 | −2.51 |
| SR-5 Equation (27) | −3.52 | −4.00 | −4.07 | −5.41 | −4.82 |
| SR-6 Equation (28) | −3.52 | −4.00 | −2.46 | −3.81 | −4.11 |
| MR-1 Equation (31) | −2.36 | −2.36 | −3.24 | −4.14 | −5.21 |
| MR-2 Equation (32) | −2.34 | −2.41 | −3.21 | −4.00 | −5.00 |
| MR-3 Equation (33) | −4.11 | −4.00 | −4.86 | −5.74 | −6.88 |
| MR-4 Equation (36) | −2.10 | −1.62 | −3.30 | −3.86 | −3.47 |
| MR-5 Equation (37) | −2.75 | −3.54 | −3.69 | −4.64 | −5.05 |
| Methods | 3rd-Order | 4th-Order | 5th-Order | 6th-Order | 7th-Order |
|---|---|---|---|---|---|
| HOCR Equation (7) | −1.97 | −1.92 | −2.21 | −2.66 | −3.15 |
| LogR-1 Equation (8) | −1.25 | −0.66 | −0.60 | −1.30 | −1.60 |
| LogR-2 Equation (9) | −1.65 | −1.92 | −2.02 | −1.72 | −1.86 |
| LinR Equation (10) | −1.97 | −1.92 | −1.80 | −1.64 | −1.95 |
| SqrtR Equation (11) | −0.51 | −0.64 | −1.01 | −1.40 | −1.84 |
| GR-1 Equation (14) | −0.07 | −0.02 | −0.01 | 0.00 | 0.00 |
| GR-2 Equation (15) | −0.07 | −0.02 | −0.01 | 0.00 | 0.00 |
| GR-3 Equation (16) | −1.57 | −1.94 | −2.00 | −2.57 | −2.91 |
| SR-1 Equation (23) | −1.22 | −0.97 | −0.96 | −0.99 | −0.93 |
| SR-2 Equation (24) | −0.86 | −0.85 | −1.06 | −1.27 | −1.21 |
| SR-3 Equation (25) | −0.74 | −0.66 | −1.61 | −1.72 | −1.85 |
| SR-4 Equation (26) | −1.65 | −1.92 | −1.29 | −1.64 | −1.01 |
| SR-5 Equation (27) | −1.65 | −1.92 | −1.99 | −2.54 | −2.30 |
| SR-6 Equation (28) | −1.65 | −1.92 | −1.12 | −1.75 | −1.86 |
| MR-1 Equation (31) | −1.09 | −1.08 | −1.45 | −1.82 | −2.20 |
| MR-2 Equation (32) | −1.09 | −1.06 | −1.45 | −1.79 | −2.17 |
| MR-3 Equation (33) | −1.97 | −1.92 | −2.21 | −2.66 | −3.15 |
| MR-4 Equation (36) | −0.97 | −0.73 | −1.53 | −1.80 | −1.46 |
| MR-5 Equation (37) | −1.29 | −1.66 | −1.78 | −2.24 | −2.44 |
| Methods | Energy () | PSNR | Time ( s) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| HOCR Equation (7) | 5.24 | 4.74 | 4.45 | 27.02 | 25.18 | 24.05 | 3.51 | 3.76 | 3.62 |
| LogR-1 Equation (8) | 7.36 | 7.77 | 7.02 | 25.52 | 21.91 | 22.17 | 5.47 | 5.69 | 5.41 |
| LogR-2 Equation (9) | 5.27 | 4.83 | 4.16 | 27.09 | 25.36 | 24.30 | 3.52 | 3.74 | 3.63 |
| LinR Equation (10) | 5.24 | 4.74 | 4.45 | 27.02 | 25.18 | 24.05 | 3.51 | 3.78 | 3.62 |
| SqrtR Equation (11) | 8.08 | 8.31 | 8.62 | 25.20 | 21.68 | 21.35 | 9.08 | 9.02 | 8.66 |
| GR-1 Equation (14) | 8.13 | 9.26 | 10.55 | 26.18 | 24.01 | 22.24 | 4.09 | 4.35 | 4.19 |
| GR-2 Equation (15) | 8.13 | 9.26 | 10.55 | 26.18 | 24.01 | 22.24 | 4.08 | 4.35 | 4.18 |
| GR-3 Equation (16) | 5.28 | 4.83 | 4.59 | 27.08 | 25.31 | 24.28 | 5.59 | 5.63 | 5.61 |
| SR-1 Equation (23) | 6.28 | 6.16 | 5.82 | 26.05 | 23.53 | 23.04 | 5.92 | 5.76 | 5.84 |
| SR-2 Equation (24) | 6.03 | 6.07 | 6.38 | 27.10 | 25.45 | 24.16 | 3.89 | 3.82 | 3.90 |
| SR-3 Equation (25) | 6.57 | 6.39 | 6.46 | 26.20 | 24.38 | 23.42 | 5.57 | 5.41 | 5.48 |
| SR-4 Equation (26) | 5.27 | 4.83 | 4.58 | 27.09 | 25.36 | 24.30 | 3.47 | 3.48 | 3.56 |
| SR-5 Equation (27) | 5.27 | 4.83 | 4.58 | 27.09 | 25.36 | 24.30 | 3.47 | 3.47 | 3.55 |
| SR-6 Equation (28) | 5.27 | 4.83 | 4.58 | 27.09 | 25.36 | 24.30 | 3.47 | 3.47 | 3.55 |
| MR-1 Equation (31) | 6.31 | 6.24 | 6.30 | 25.94 | 23.92 | 22.88 | 6.63 | 6.65 | 6.77 |
| MR-2 Equation (32) | 6.51 | 6.50 | 6.47 | 25.70 | 23.44 | 22.53 | 5.27 | 5.36 | 5.39 |
| MR-3 Equation (33) | 5.27 | 4.82 | 4.58 | 27.09 | 25.35 | 24.30 | 3.46 | 3.45 | 3.53 |
| MR-4 Equation (36) | 6.29 | 6.11 | 6.04 | 26.17 | 24.14 | 23.21 | 7.59 | 7.69 | 7.61 |
| MR-5 Equation (37) | 5.58 | 5.29 | 5.25 | 27.17 | 25.58 | 24.48 | 7.60 | 7.72 | 7.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Yang, H.; Liu, Y. An Order Reduction Design Framework for Higher-Order Binary Markov Random Fields. Entropy 2023, 25, 535. https://doi.org/10.3390/e25030535
Chen Z, Yang H, Liu Y. An Order Reduction Design Framework for Higher-Order Binary Markov Random Fields. Entropy. 2023; 25(3):535. https://doi.org/10.3390/e25030535
Chicago/Turabian StyleChen, Zhuo, Hongyu Yang, and Yanli Liu. 2023. "An Order Reduction Design Framework for Higher-Order Binary Markov Random Fields" Entropy 25, no. 3: 535. https://doi.org/10.3390/e25030535