

Reviving the Dynamics of Attacked Reservoir Computers

Abstract
:1. Introduction
2. Method
2.1. Standard Reservoir Computer
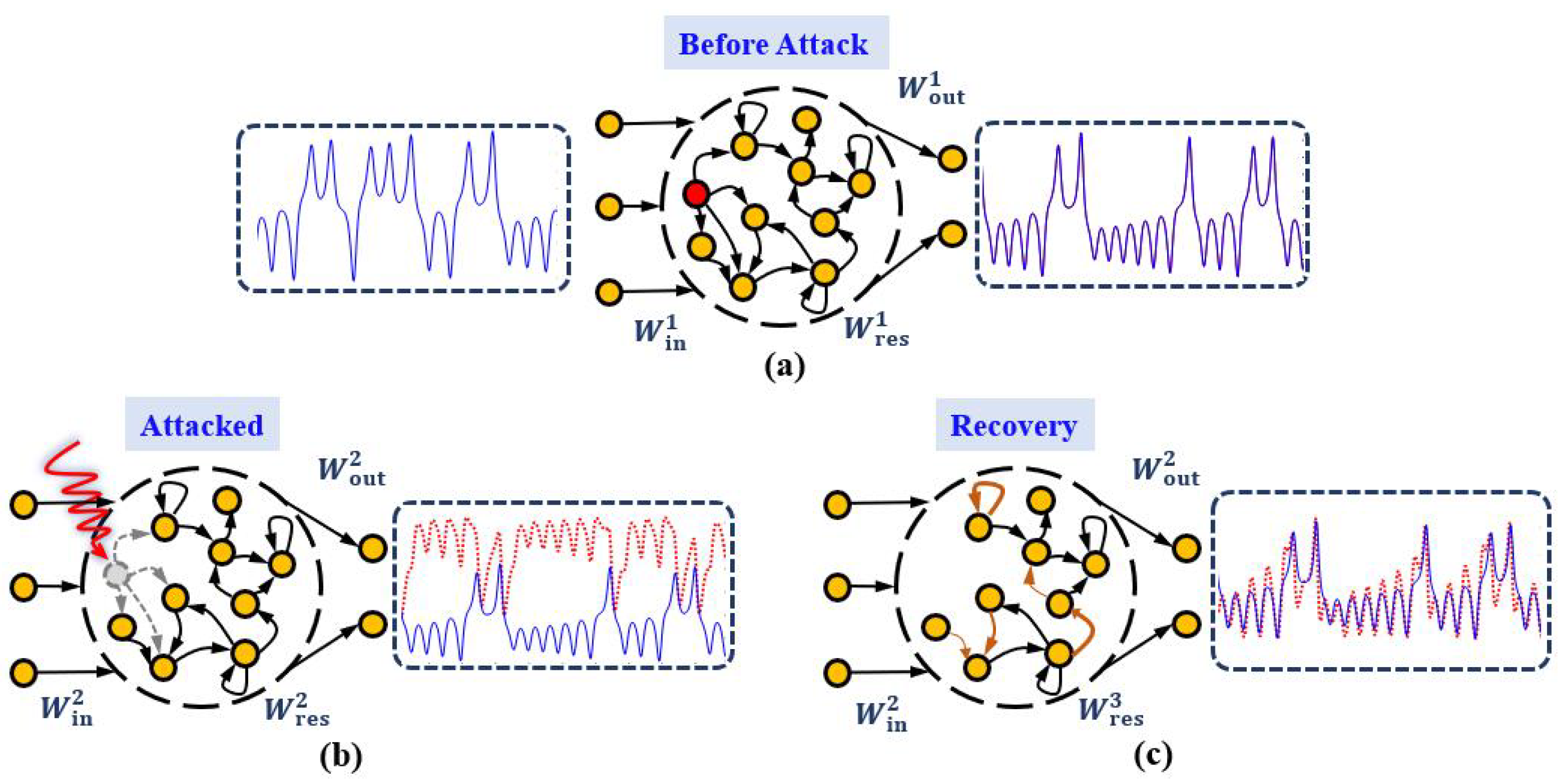
2.2. Reservoir-Attack Mechanisms
2.3. Rc-Revive Strategies
| Algorithm 1 Simulated Annealing-based recovery of RC |
| Input: , is a set of edges in allowing adjusting depending on strategies, is the maximum iterations, N is the number of edges perturbed each time during SA Output: MSE = MSE() for do Perturb N edges randomly from by adding to obtain if then else end if if then end if end for |
3. Result
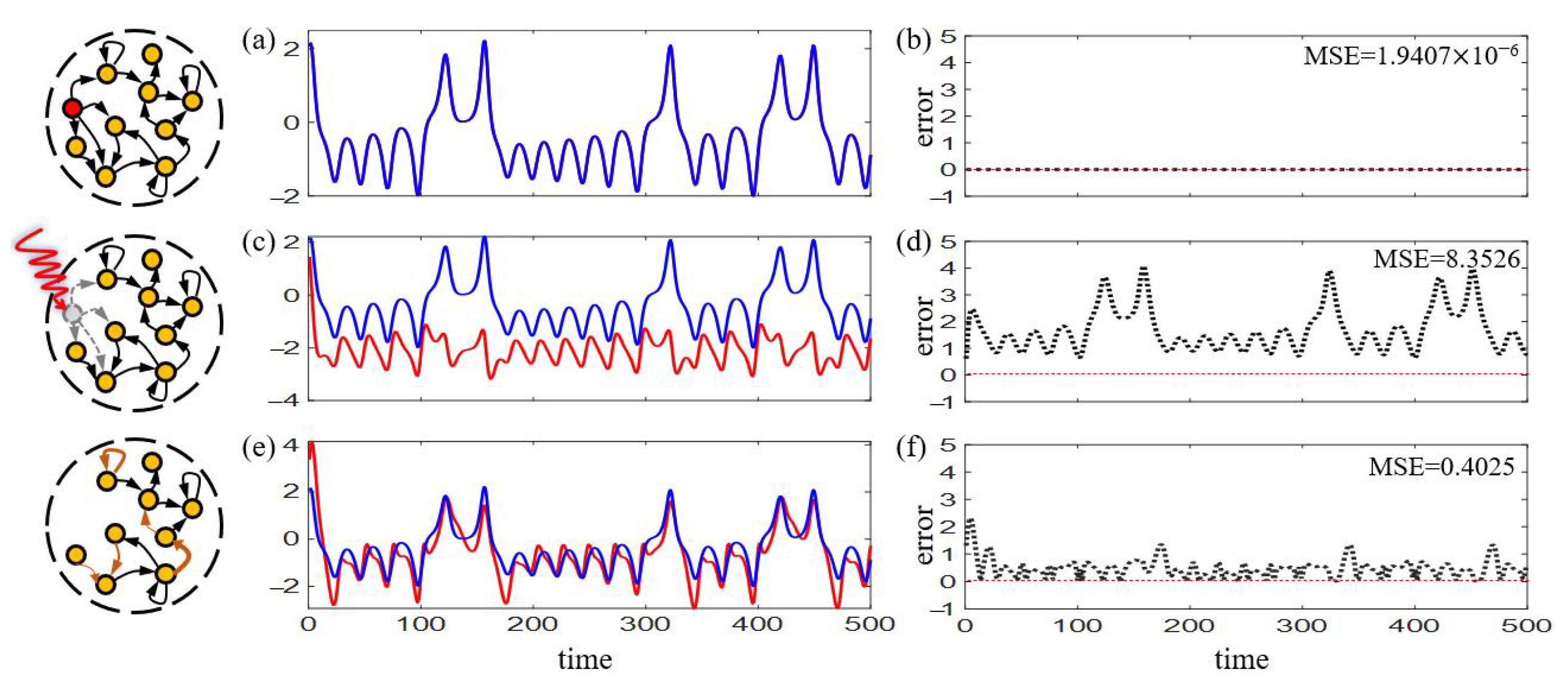
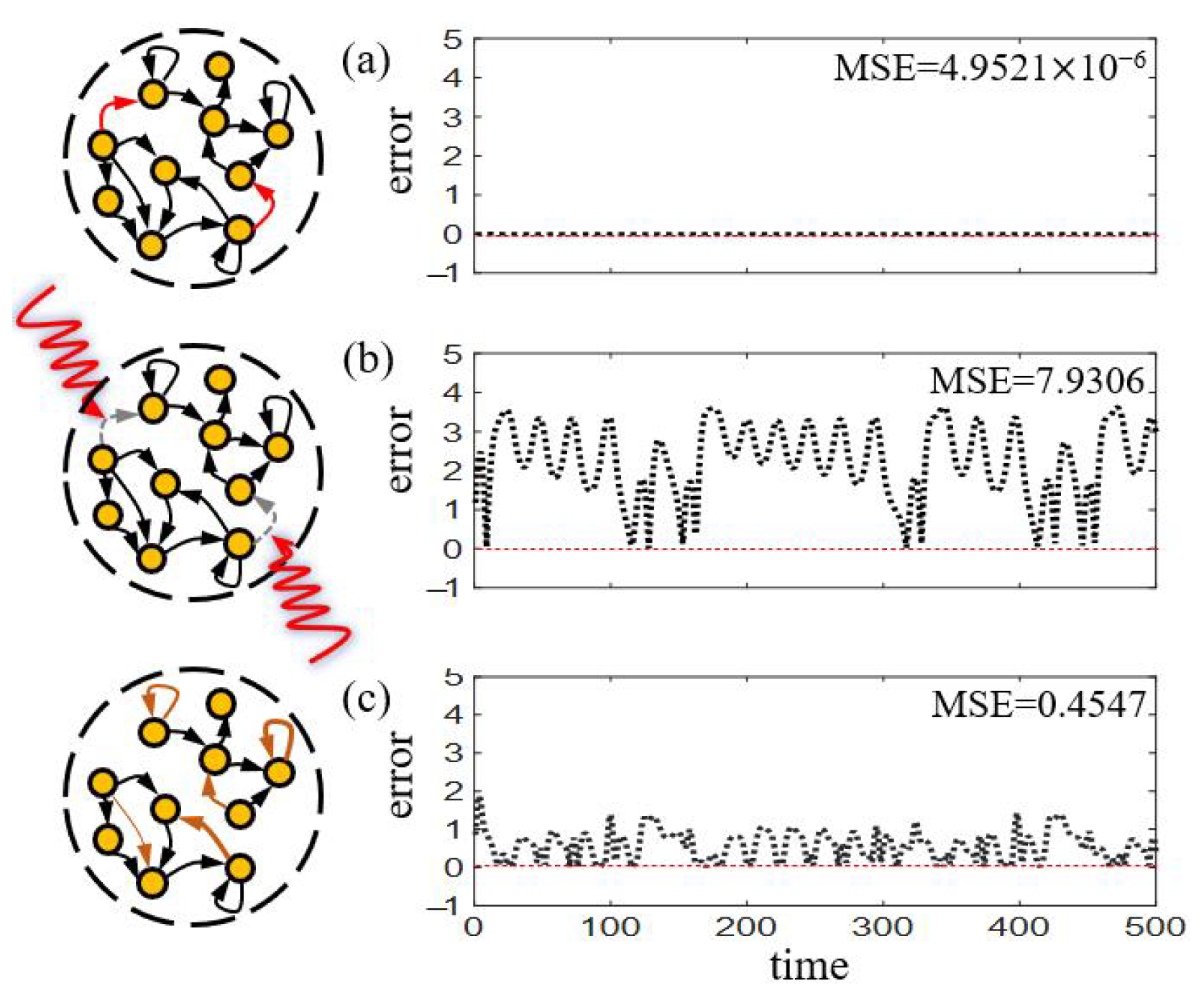
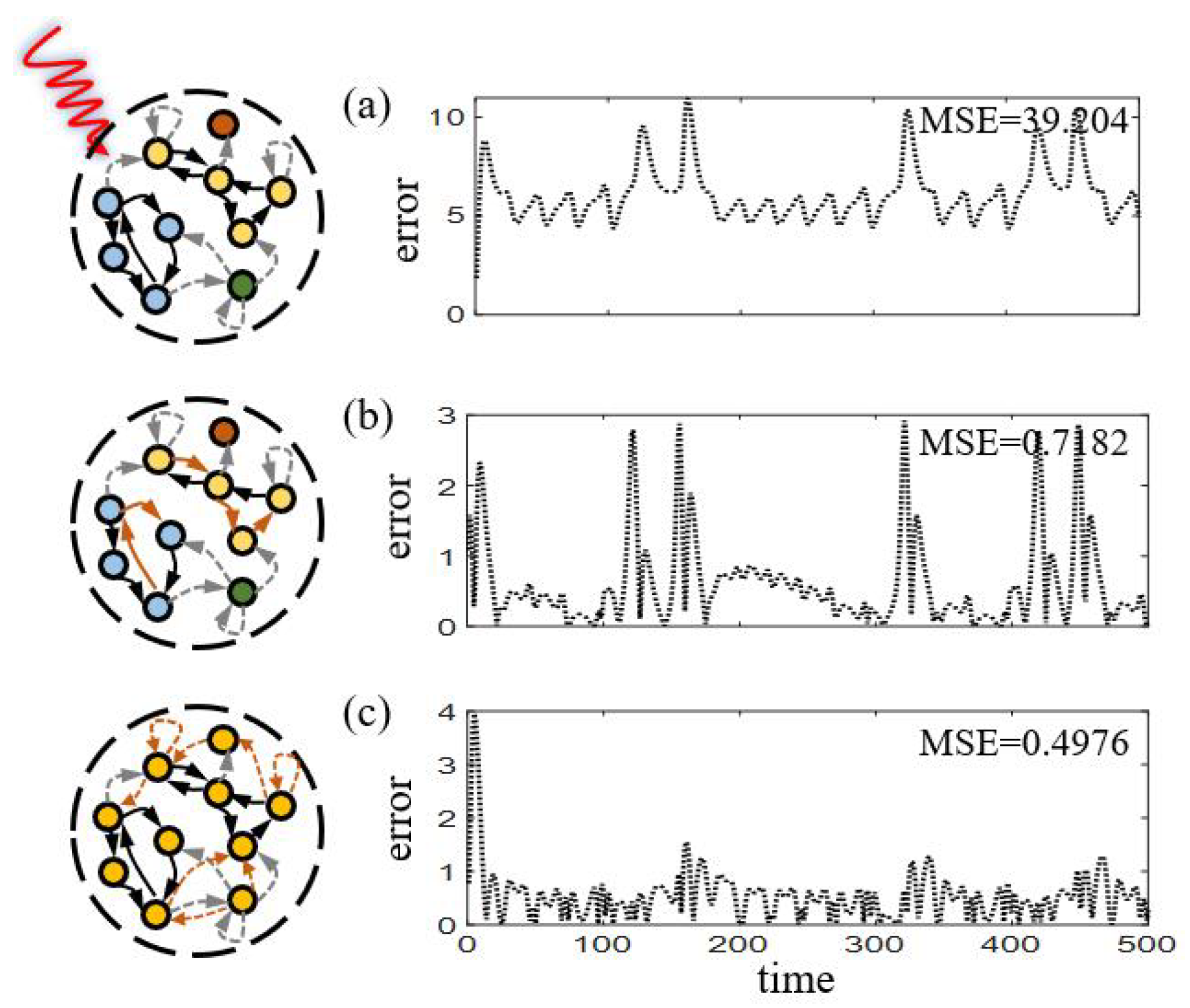
3.1. Node-Attack and Recovery
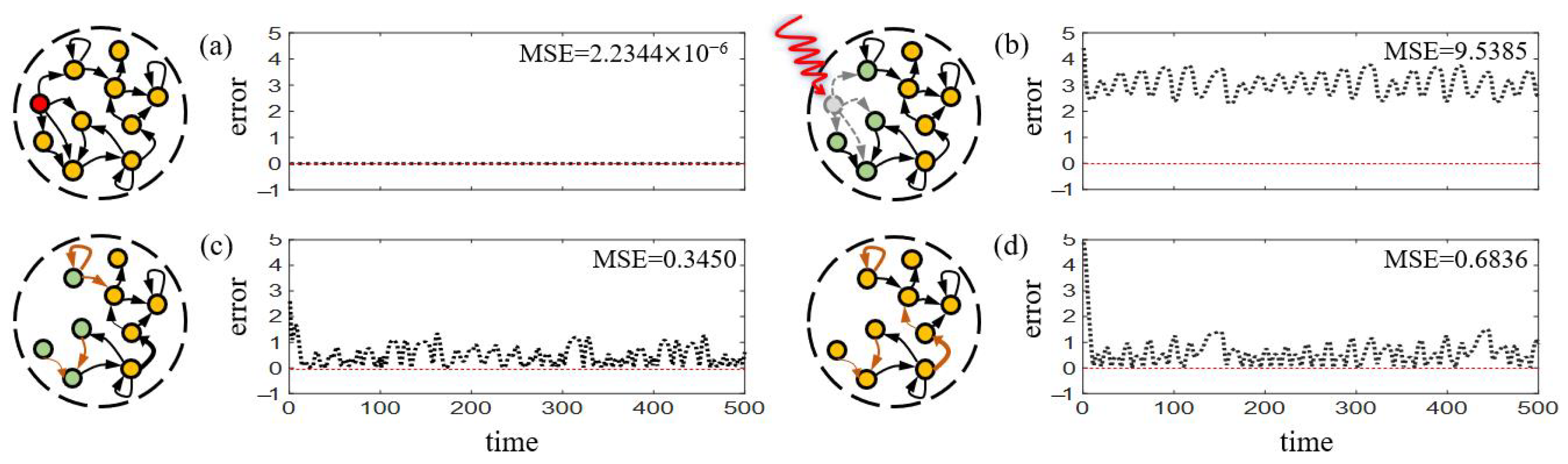
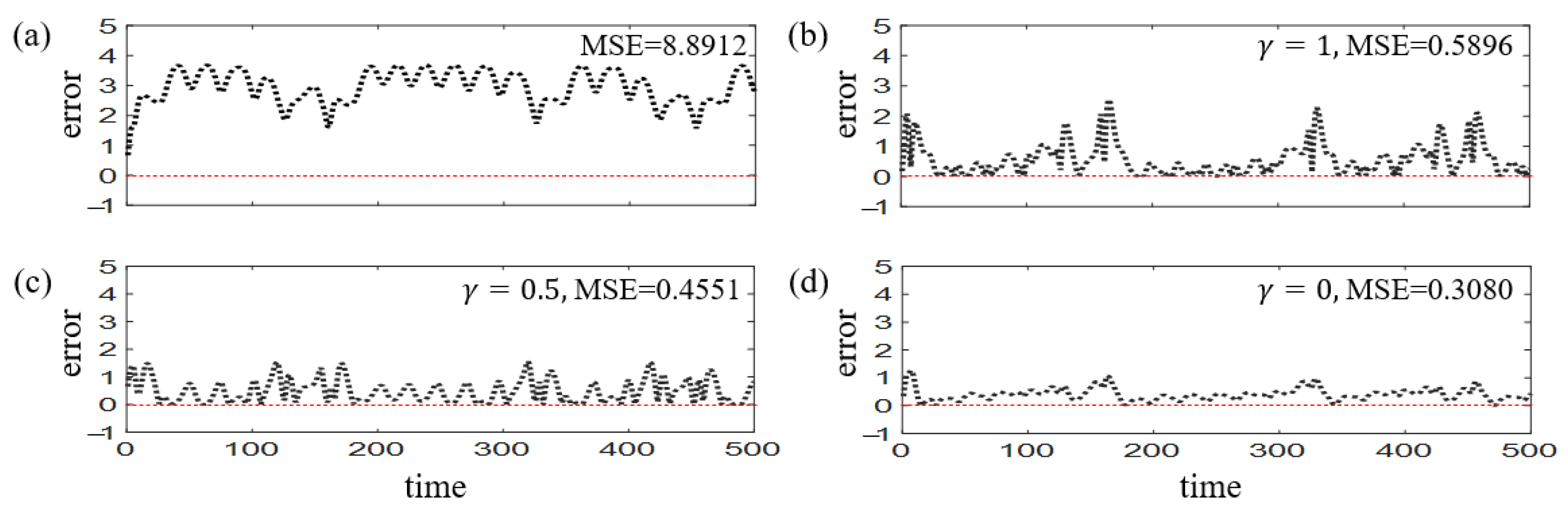
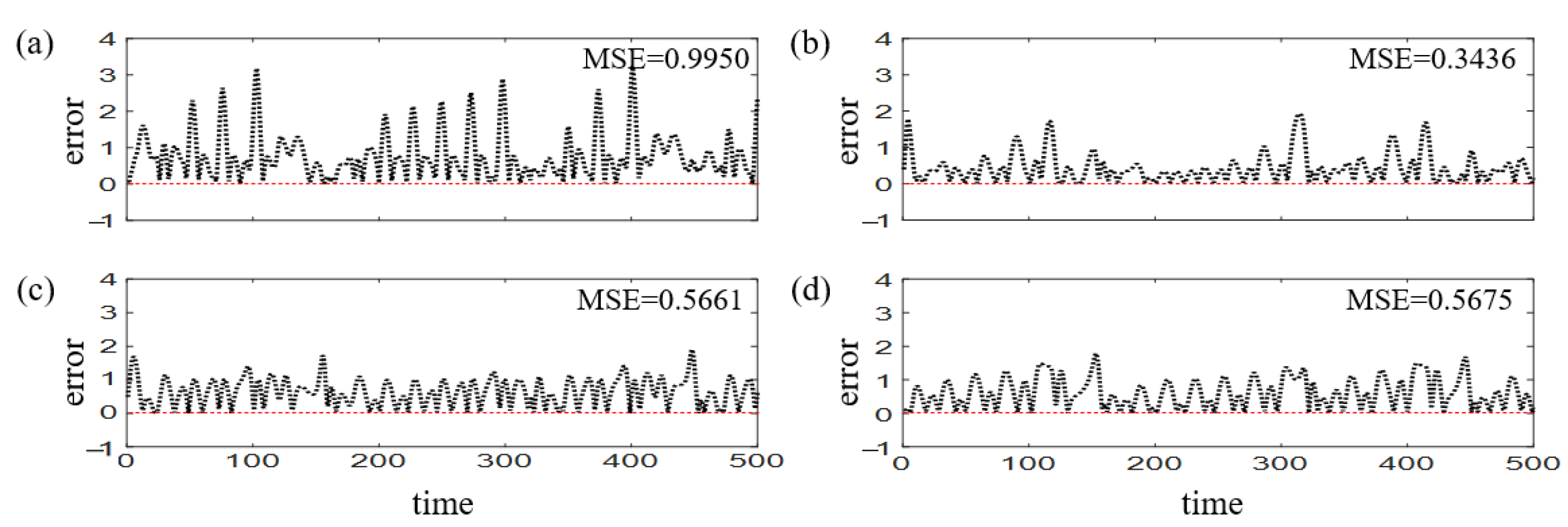
3.2. Edge-Attack and Recovery
4. Discussion
4.1. Ineffectiveness of Precaution to Reservoir
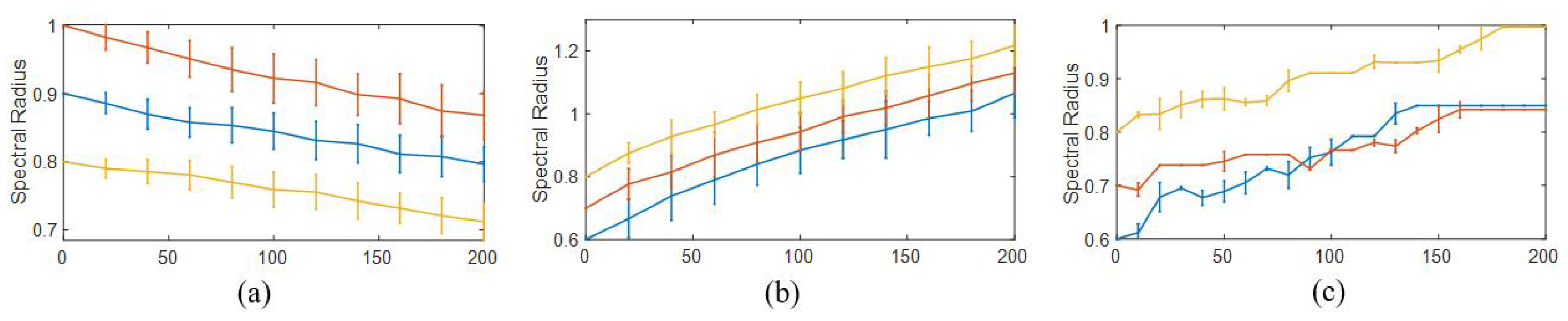
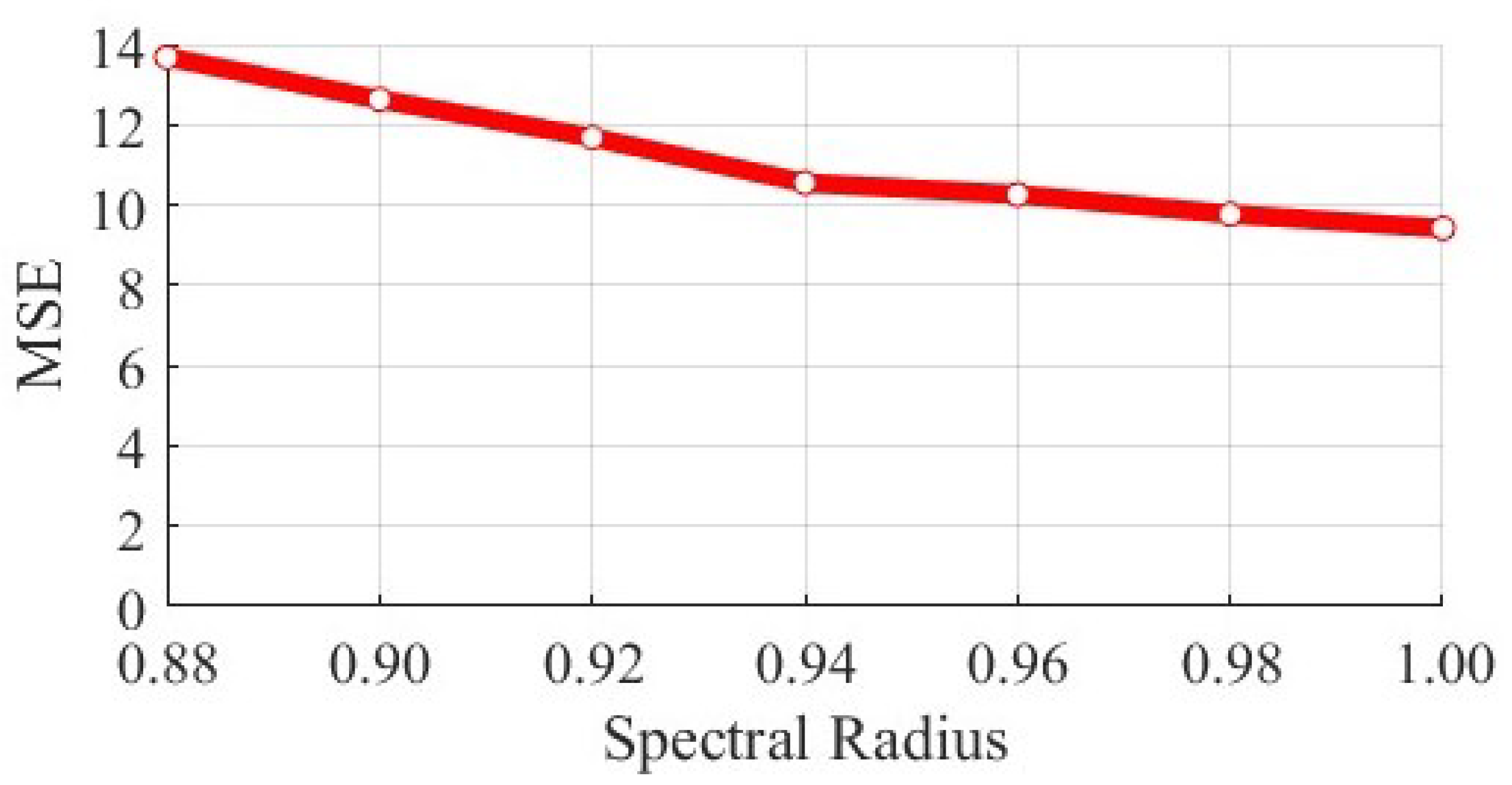
4.2. Echo State Property vs. Attack and Recovery
4.3. How to Choose Recovery Strategies
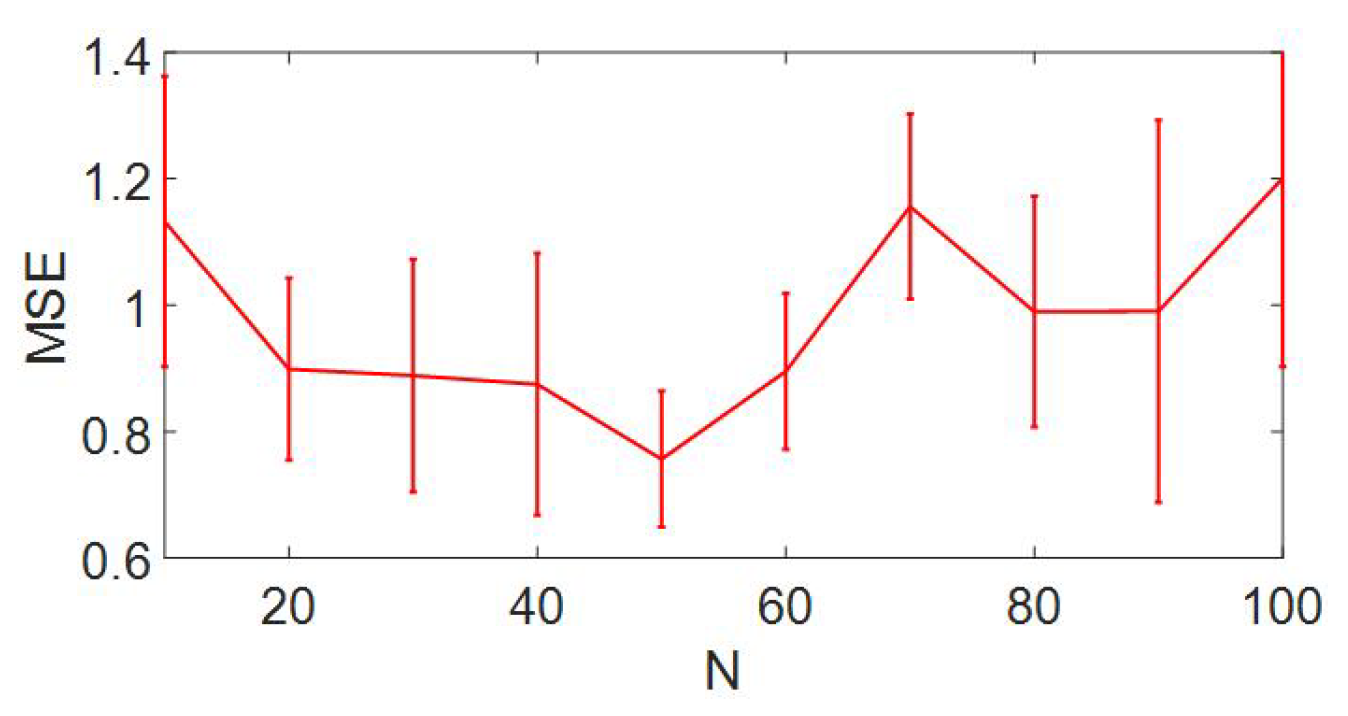
4.4. Minor Adjusting Is Sufficient for Recovery
4.5. Attack and Recovery in Other Neural Networks
5. Conclusions
- (1)
- Adjusting adjacent neurons/synapses is more effective than distant ones;
- (2)
- Enriching the reservoir network is more effective than adjusting existing edges;
- (3)
- Reservoir connectedness and attacked edge betweenness centrality are crucial criteria in choosing optimal recovery strategies; and
- (4)
- Minor adjustments are sufficient for recovery.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, F.; Qin, Z.; Liu, C.; Zhao, L.; Wang, Y.; Chen, X. Interpreting and Evaluating Neural Network Robustness. In Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, IJCAI-19, International Joint Conferences on Artificial Intelligence Organization, Macao, China, 10–16 August 2019; pp. 4199–4205. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Kroening, D.; Ruan, W.; Sharp, J.; Sun, Y.; Thamo, E.; Wu, M.; Yi, X. A survey of safety and trustworthiness of deep neural networks: Verification, testing, adversarial attack and defence, and interpretability. Comput. Sci. Rev. 2020, 37, 100270. [Google Scholar] [CrossRef]
- Su, J.; Vargas, D.V.; Sakurai, K. One Pixel Attack for Fooling Deep Neural Networks. IEEE Trans. Evol. Comput. 2019, 23, 828–841. [Google Scholar] [CrossRef] [Green Version]
- Draghici, S. Neural networks in analog hardware—Design and implementation issues. Int. J. Neural Syst. 2000, 10, 19–42. [Google Scholar] [CrossRef] [PubMed]
- Fawaz, H.I.; Forestier, G.; Weber, J.; Idoumghar, L.; Muller, P.A. Adversarial attacks on deep neural networks for time series classification. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Karim, F.; Majumdar, S.; Darabi, H. Adversarial attacks on time series. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 3309–3320. [Google Scholar] [CrossRef] [Green Version]
- Jin, W.; Li, Y.; Xu, H.; Wang, Y.; Ji, S.; Aggarwal, C.; Tang, J. Adversarial attacks and defenses on graphs. ACM SIGKDD Explor. Newsl. 2021, 22, 19–34. [Google Scholar] [CrossRef]
- Cohen, R.; Erez, K.; Ben-Avraham, D.; Havlin, S. Breakdown of the internet under intentional attack. Phys. Rev. Lett. 2001, 86, 3682. [Google Scholar] [CrossRef] [Green Version]
- Bellingeri, M.; Cassi, D.; Vincenzi, S. Efficiency of attack strategies on complex model and real-world networks. Phys. A Stat. Mech. Its Appl. 2014, 414, 174–180. [Google Scholar] [CrossRef] [Green Version]
- Marder, E.; Goaillard, J.M. Variability, compensation and homeostasis in neuron and network function. Nat. Rev. Neurosci. 2006, 7, 563–574. [Google Scholar] [CrossRef]
- Gehring, W.J.; Goss, B.; Coles, M.G.; Meyer, D.E.; Donchin, E. A neural system for error detection and compensation. Psychol. Sci. 1993, 4, 385–390. [Google Scholar] [CrossRef]
- Song, J.; Birn, R.M.; Boly, M.; Meier, T.B.; Nair, V.A.; Meyerand, M.E.; Prabhakaran, V. Age-related reorganizational changes in modularity and functional connectivity of human brain networks. Brain Connect. 2014, 4, 662–676. [Google Scholar] [CrossRef]
- Biou, E.; Cassoudesalle, H.; Cogné, M.; Sibon, I.; De Gabory, I.; Dehail, P.; Aupy, J.; Glize, B. Transcranial direct current stimulation in post-stroke aphasia rehabilitation: A systematic review. Ann. Phys. Rehabil. Med. 2019, 62, 104–121. [Google Scholar] [CrossRef]
- Pelletier, S.J.; Cicchetti, F. Cellular and molecular mechanisms of action of transcranial direct current stimulation: Evidence from in vitro and in vivo models. Int. J. Neuropsychopharmacol. 2015, 18, pyu047. [Google Scholar] [CrossRef]
- DaSilva, A.F.; Volz, M.S.; Bikson, M.; Fregni, F. Electrode positioning and montage in transcranial direct current stimulation. JoVE 2011, 51, e2744. [Google Scholar] [CrossRef] [Green Version]
- Mancini, M.; Brignani, D.; Conforto, S.; Mauri, P.; Miniussi, C.; Pellicciari, M.C. Assessing cortical synchronization during transcranial direct current stimulation: A graph-theoretical analysis. NeuroImage 2016, 140, 57–65. [Google Scholar] [CrossRef]
- Brunoni, A.R.; Nitsche, M.A.; Bolognini, N.; Bikson, M.; Wagner, T.; Merabet, L.; Edwards, D.J.; Valero-Cabre, A.; Rotenberg, A.; Pascual-Leone, A.; et al. Clinical research with transcranial direct current stimulation (tDCS): Challenges and future directions. Brain Stimul. 2012, 5, 175–195. [Google Scholar] [CrossRef] [Green Version]
- Nitsche, M.A.; Boggio, P.S.; Fregni, F.; Pascual-Leone, A. Treatment of depression with transcranial direct current stimulation (tDCS): A review. Exp. Neurol. 2009, 219, 14–19. [Google Scholar] [CrossRef]
- Albert, R.; Jeong, H.; Barabási, A.L. Error and attack tolerance of complex networks. Nature 2000, 406, 378–382. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.; Pham, H.D.; Cassi, D.; Bellingeri, M. Conditional attack strategy for real-world complex networks. Phys. A Stat. Mech. Its Appl. 2019, 530, 121561. [Google Scholar] [CrossRef]
- Khunasaraphan, C.; Vanapipat, K.; Lursinsap, C. Weight shifting techniques for self-recovery neural networks. IEEE Trans. Neural Netw. 1994, 5, 651–658. [Google Scholar] [CrossRef]
- Xu, Z.; Lin, M.; Liu, J.; Chen, J.; Shao, L.; Gao, Y.; Tian, Y.; Ji, R. Recu: Reviving the dead weights in binary neural networks. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 5198–5208. [Google Scholar] [CrossRef]
- Sanhedrai, H.; Gao, J.; Bashan, A.; Schwartz, M.; Havlin, S.; Barzel, B. Reviving a failed network through microscopic interventions. Nat. Phys. 2022, 18, 338–349. [Google Scholar] [CrossRef]
- Lukoševičius, M.; Jaeger, H. Reservoir computing approaches to recurrent neural network training. Comput. Sci. Rev. 2009, 3, 127–149. [Google Scholar] [CrossRef]
- Maass, W.; Natschläger, T.; Markram, H. A model for real-time computation in generic neural microcircuits. Adv. Neural Inf. Process. Syst. 2002, 15. [Google Scholar]
- Hadaeghi, F.; He, X.; Jaeger, H. Unconventional Information Processing Systems, Novel Hardware: A Tour D’Horizon; IRC-Library, Information Resource Center der Jacobs University Bremen: Bremen, Germany, 2017. [Google Scholar] [CrossRef]
- Buonomano, D.V.; Maass, W. State-dependent computations: Spatiotemporal processing in cortical networks. Nat. Rev. Neurosci. 2009, 10, 113–125. [Google Scholar] [CrossRef] [PubMed]
- Ren, B.; Ma, H. Global optimization of hyper-parameters in reservoir computing. Electron. Res. Arch. 2022, 30, 2719–2729. [Google Scholar] [CrossRef]
- Zhong, Y.; Tang, J.; Li, X.; Liang, X.; Liu, Z.; Li, Y.; Xi, Y.; Yao, P.; Hao, Z.; Gao, B.; et al. A memristor-based analogue reservoir computing system for real-time and power-efficient signal processing. Nat. Electron. 2022, 5, 672–681. [Google Scholar] [CrossRef]
- Leng, S.; Aihara, K. Common stochastic inputs induce neuronal transient synchronization with partial reset. Neural Netw. 2020, 128, 13–21. [Google Scholar] [CrossRef]
- Hart, A.; Hook, J.; Dawes, J. Embedding and approximation theorems for echo state networks. Neural Netw. 2020, 128, 234–247. [Google Scholar] [CrossRef]
- Jaeger, H.; Lukoševičius, M.; Popovici, D.; Siewert, U. Optimization and applications of echo state networks with leaky-integrator neurons. Neural Netw. 2007, 20, 335–352. [Google Scholar] [CrossRef]
- Verstraeten, D.; Schrauwen, B.; Stroobandt, D. Reservoir-based techniques for speech recognition. In Proceedings of the 2006 IEEE International Joint Conference on Neural Network Proceedings, Vancouver, BC, Canada, 16–21 July 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1050–1053. [Google Scholar] [CrossRef]
- Vlachas, P.R.; Pathak, J.; Hunt, B.R.; Sapsis, T.P.; Girvan, M.; Ott, E.; Koumoutsakos, P. Backpropagation algorithms and reservoir computing in recurrent neural networks for the forecasting of complex spatiotemporal dynamics. Neural Netw. 2020, 126, 191–217. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Han, S.; Pool, J.; Tran, J.; Dally, W. Learning both weights and connections for efficient neural network. Adv. Neural Inf. Process. Syst. 2015, 28. [Google Scholar] [CrossRef]
- Liu, K.; Dang, B.; Zhang, T.; Yang, Z.; Bao, L.; Xu, L.; Cheng, C.; Huang, R.; Yang, Y. Multilayer Reservoir Computing Based on Ferroelectric α-In2Se3 for Hierarchical Information Processing. Adv. Mater. 2022, 34, 2108826. [Google Scholar] [CrossRef]
- Liang, X.; Zhong, Y.; Tang, J.; Liu, Z.; Yao, P.; Sun, K.; Zhang, Q.; Gao, B.; Heidari, H.; Qian, H.; et al. Rotating neurons for all-analog implementation of cyclic reservoir computing. Nat. Commun. 2022, 13, 1549. [Google Scholar] [CrossRef]
- Fan, H.; Jiang, J.; Zhang, C.; Wang, X.; Lai, Y.C. Long-term prediction of chaotic systems with machine learning. Phys. Rev. Res. 2020, 2, 012080. [Google Scholar] [CrossRef] [Green Version]
- Ma, H.; Leng, S.; Aihara, K.; Lin, W.; Chen, L. Randomly distributed embedding making short-term high-dimensional data predictable. Proc. Natl. Acad. Sci. USA 2018, 115, E9994–E10002. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Liu, R.; Aihara, K.; Chen, L. Autoreservoir computing for multistep ahead prediction based on the spatiotemporal information transformation. Nat. Commun. 2020, 11, 4568. [Google Scholar] [CrossRef]
- Yildiz, I.B.; Jaeger, H.; Kiebel, S.J. Re-visiting the echo state property. Neural Netw. 2012, 35, 1–9. [Google Scholar] [CrossRef]
- Van Laarhoven, P.J.; Aarts, E.H. Simulated annealing. In Simulated Annealing: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 1987; pp. 7–15. [Google Scholar] [CrossRef]
- Lao, J.; Yan, M.; Tian, B.; Jiang, C.; Luo, C.; Xie, Z.; Zhu, Q.; Bao, Z.; Zhong, N.; Tang, X.; et al. Ultralow-Power Machine Vision with Self-Powered Sensor Reservoir. Adv. Sci. 2022, 9, 2106092. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Estrada, E.; Rodriguez-Velazquez, J.A. Subgraph centrality in complex networks. Phys. Rev. E 2005, 71, 056103. [Google Scholar] [CrossRef] [Green Version]
- Bolland, J.M. Sorting out centrality: An analysis of the performance of four centrality models in real and simulated networks. Soc. Netw. 1988, 10, 233–253. [Google Scholar] [CrossRef]
- Opsahl, T.; Agneessens, F.; Skvoretz, J. Node centrality in weighted networks: Generalizing degree and shortest paths. Soc. Netw. 2010, 32, 245–251. [Google Scholar] [CrossRef]
- Barthelemy, M. Betweenness centrality in large complex networks. Eur. Phys. J. B 2004, 38, 163–168. [Google Scholar] [CrossRef]
- Xing, W.; Ghorbani, A. Weighted pagerank algorithm. In Proceedings of the Second Annual Conference on Communication Networks and Services Research, Bhopal, India, 14–16 November 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 305–314. [Google Scholar] [CrossRef]
- Verstraeten, D.; Dambre, J.; Dutoit, X.; Schrauwen, B. Memory versus non-linearity in reservoirs. In Proceedings of the 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Berman, A.; Zhang, X.D. On the spectral radius of graphs with cut vertices. J. Comb. Theory Ser. B 2001, 83, 233–240. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, B.; Xia, Y.; Wang, C.; Ye, Q.; Yan, Z.; Tang, Q. Quantifying importance of edges in networks. IEEE Trans. Circuits Syst. Express Briefs 2018, 65, 1244–1248. [Google Scholar] [CrossRef]
- Girvan, M.; Newman, M.E. Community structure in social and biological networks. Proc. Natl. Acad. Sci. USA 2002, 99, 7821–7826. [Google Scholar] [CrossRef] [Green Version]
- Bompard, E.; Wu, D.; Xue, F. Structural vulnerability of power systems: A topological approach. Electr. Power Syst. Res. 2011, 81, 1334–1340. [Google Scholar] [CrossRef]
- Wu, T.; Wang, X.; Qiao, S.; Xian, X.; Liu, Y.; Zhang, L. Small perturbations are enough: Adversarial attacks on time series prediction. Inf. Sci. 2022, 587, 794–812. [Google Scholar] [CrossRef]
- Zügner, D.; Akbarnejad, A.; Günnemann, S. Adversarial attacks on neural networks for graph data. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 2847–2856. [Google Scholar] [CrossRef] [Green Version]
- Nirkin, Y.; Masi, I.; Tuan, A.T.; Hassner, T.; Medioni, G. On face segmentation, face swapping, and face perception. In Proceedings of the 2018 13th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2018), Xi’an, China, 15–19 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 98–105. [Google Scholar] [CrossRef] [Green Version]
- Hussain, S.; Neekhara, P.; Jere, M.; Koushanfar, F.; McAuley, J. Adversarial deepfakes: Evaluating vulnerability of deepfake detectors to adversarial examples. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Virtual, 5–9 January 2021; pp. 3348–3357. [Google Scholar] [CrossRef]
- Li, L.; Bao, J.; Yang, H.; Chen, D.; Wen, F. Faceshifter: Towards high fidelity and occlusion aware face swapping. arXiv 2019, arXiv:1912.13457. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Importance Measurement | a | -Score |
|---|---|---|
| Degree Centrality | 0.03 | |
| Node Strength | 0.06 | |
| Betweenness Centrality | 0.12 | |
| PageRank | 0.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, R.; Guan, C.; Gan, Z.; Leng, S. Reviving the Dynamics of Attacked Reservoir Computers. Entropy 2023, 25, 515. https://doi.org/10.3390/e25030515
Cao R, Guan C, Gan Z, Leng S. Reviving the Dynamics of Attacked Reservoir Computers. Entropy. 2023; 25(3):515. https://doi.org/10.3390/e25030515
Chicago/Turabian StyleCao, Ruizhi, Chun Guan, Zhongxue Gan, and Siyang Leng. 2023. "Reviving the Dynamics of Attacked Reservoir Computers" Entropy 25, no. 3: 515. https://doi.org/10.3390/e25030515