
From Nonlinear Dominant System to Linear Dominant System: Virtual Equivalent System Approach for Multiple Variable Self-Tuning Control System Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
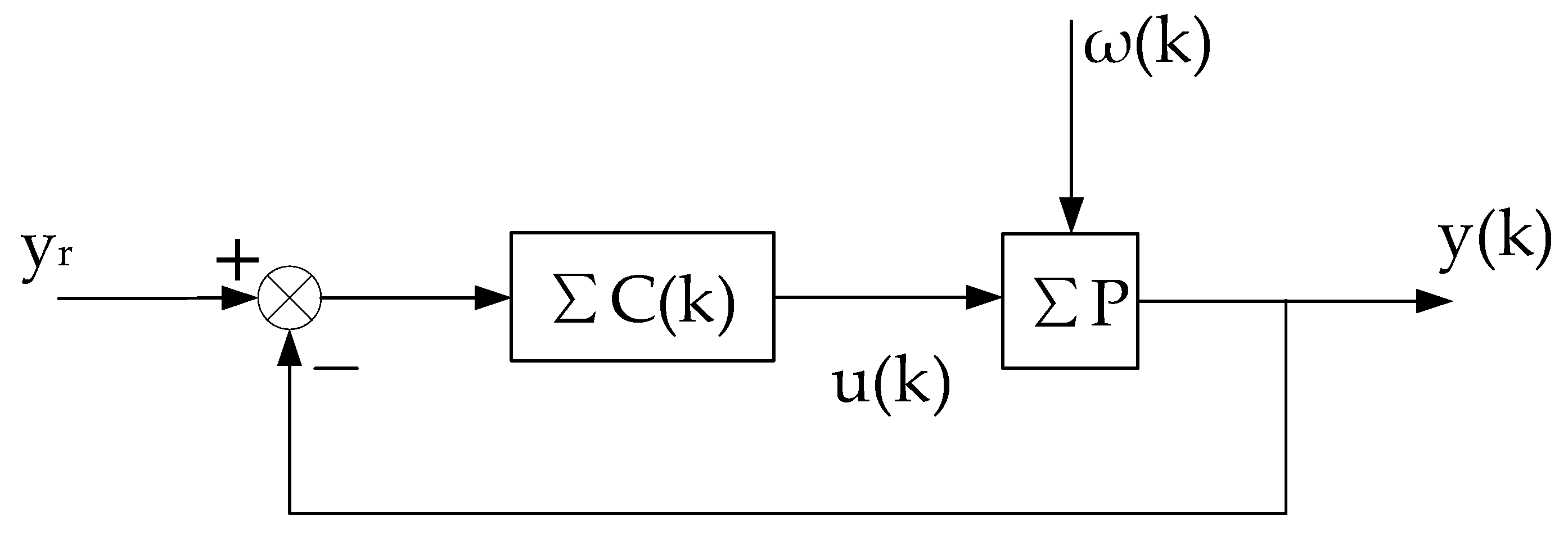
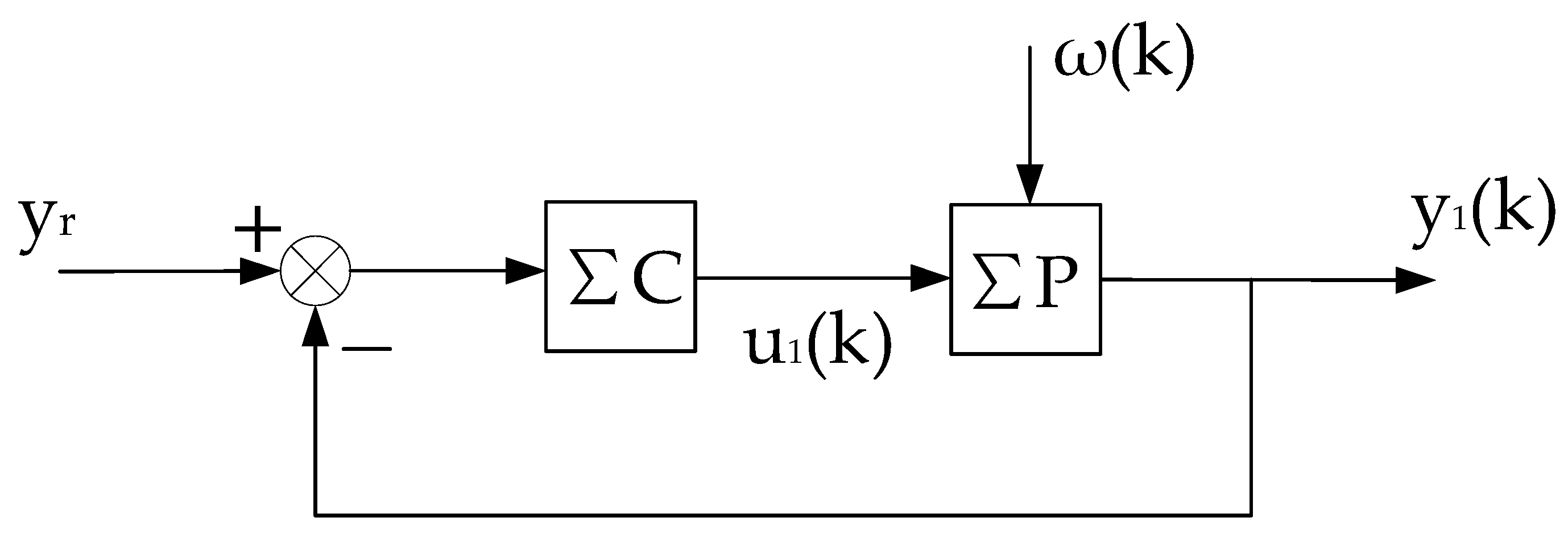
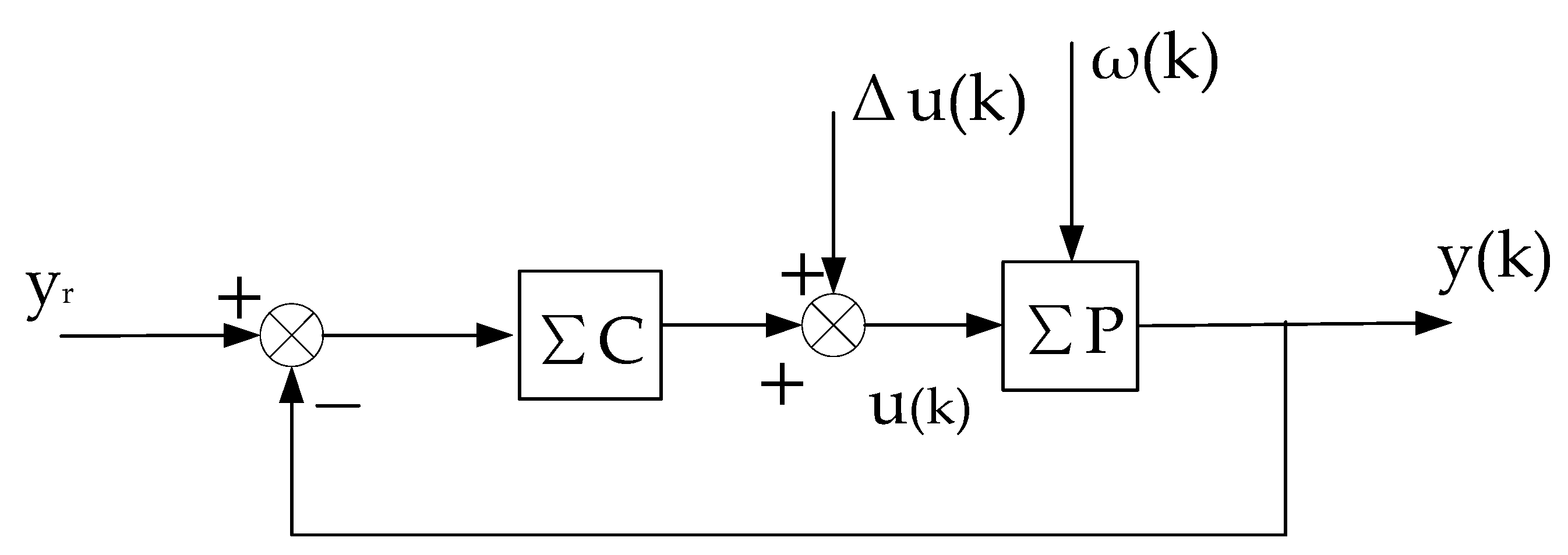
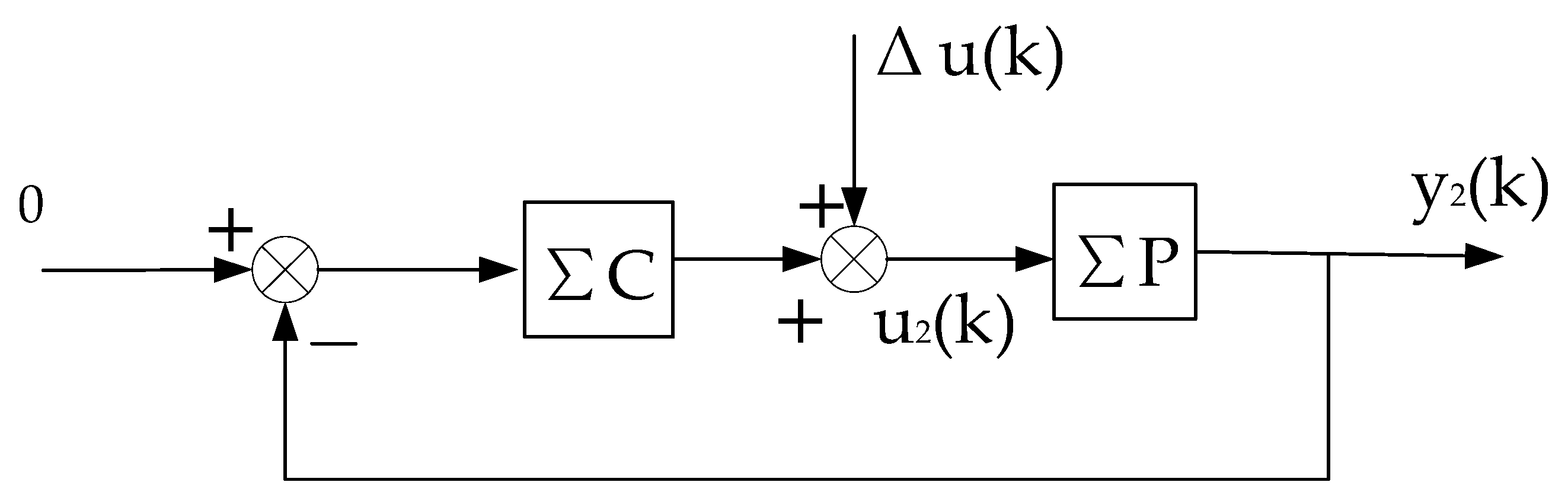
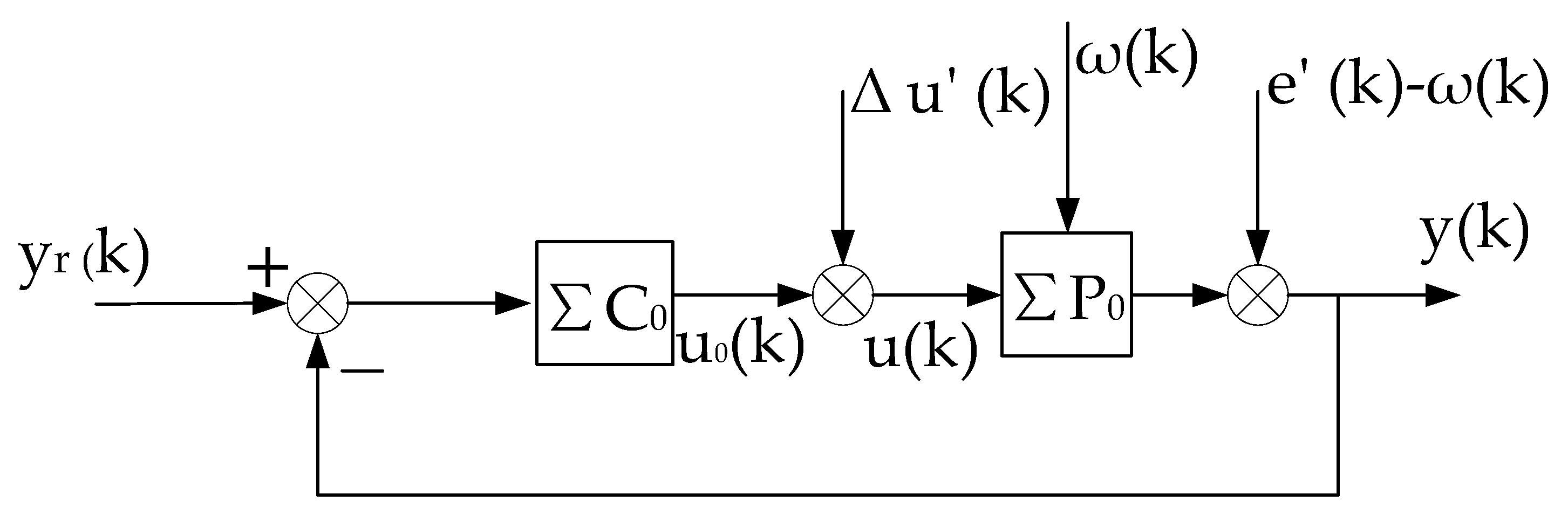
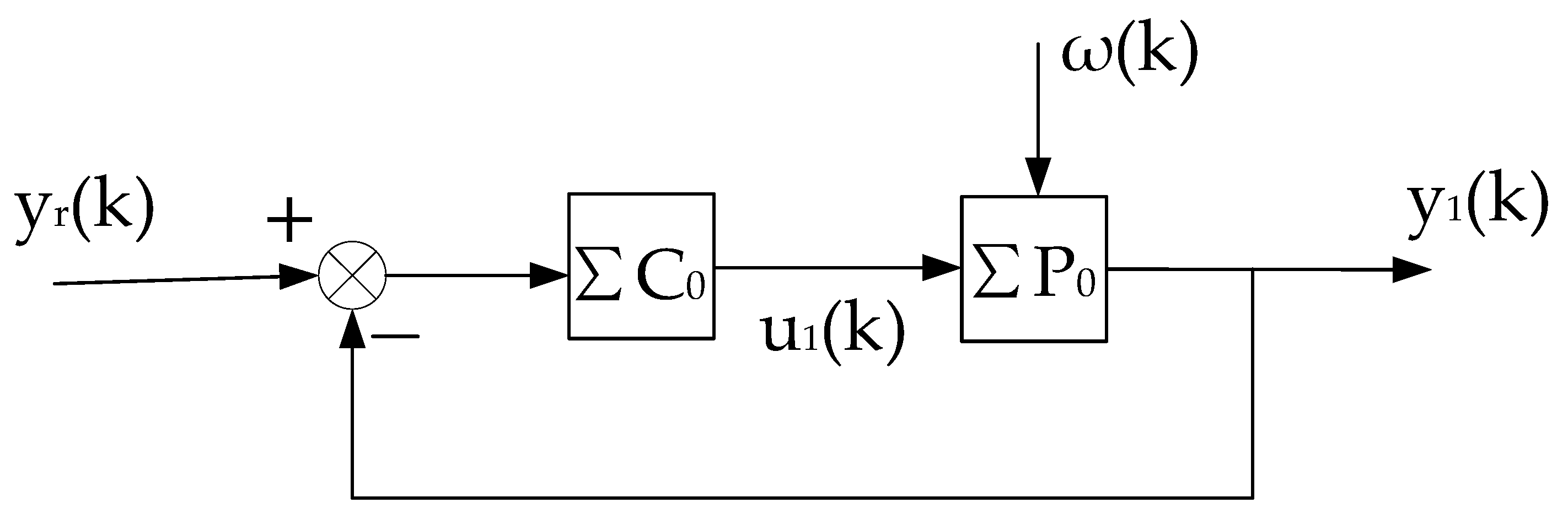
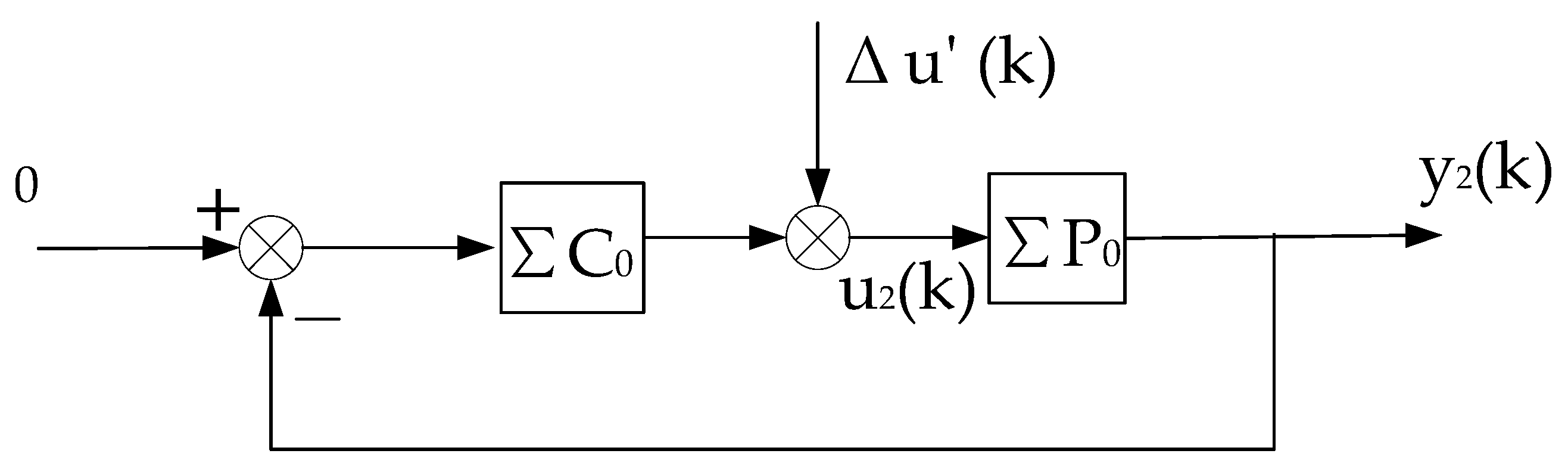
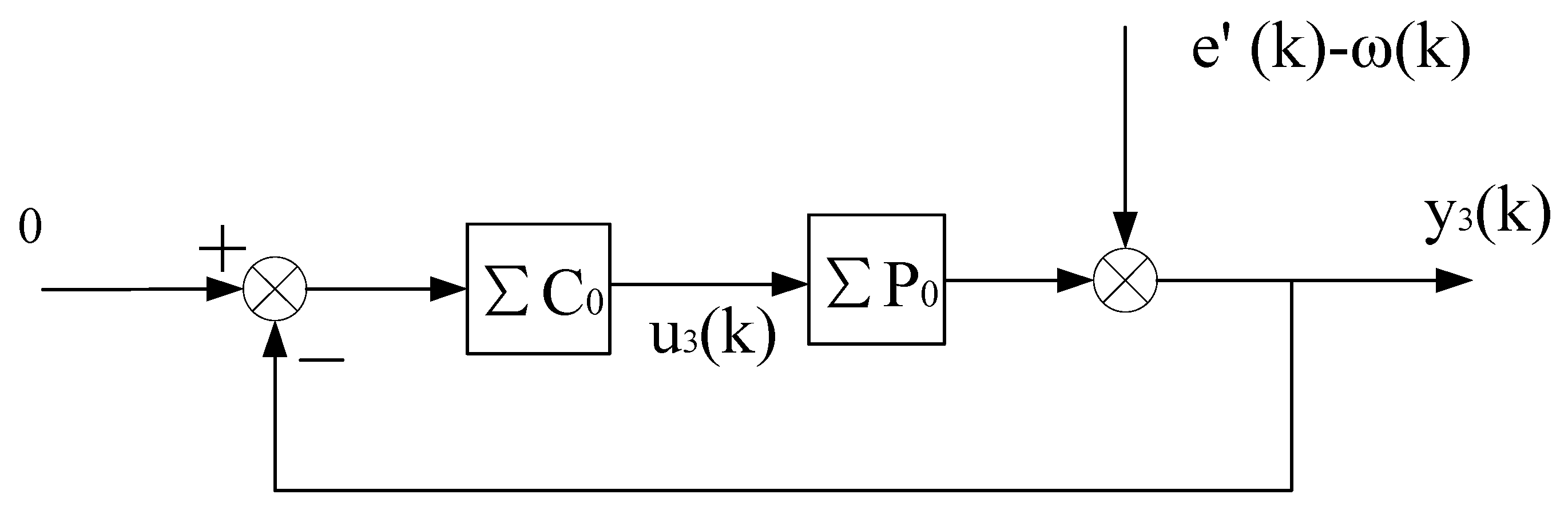
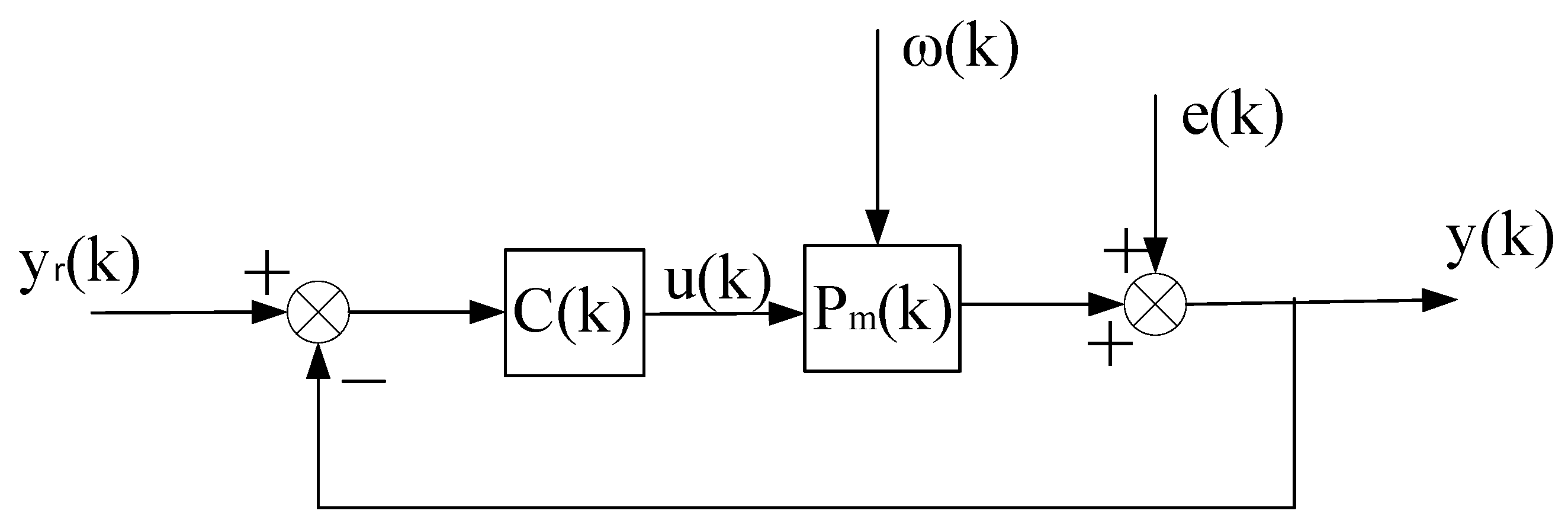
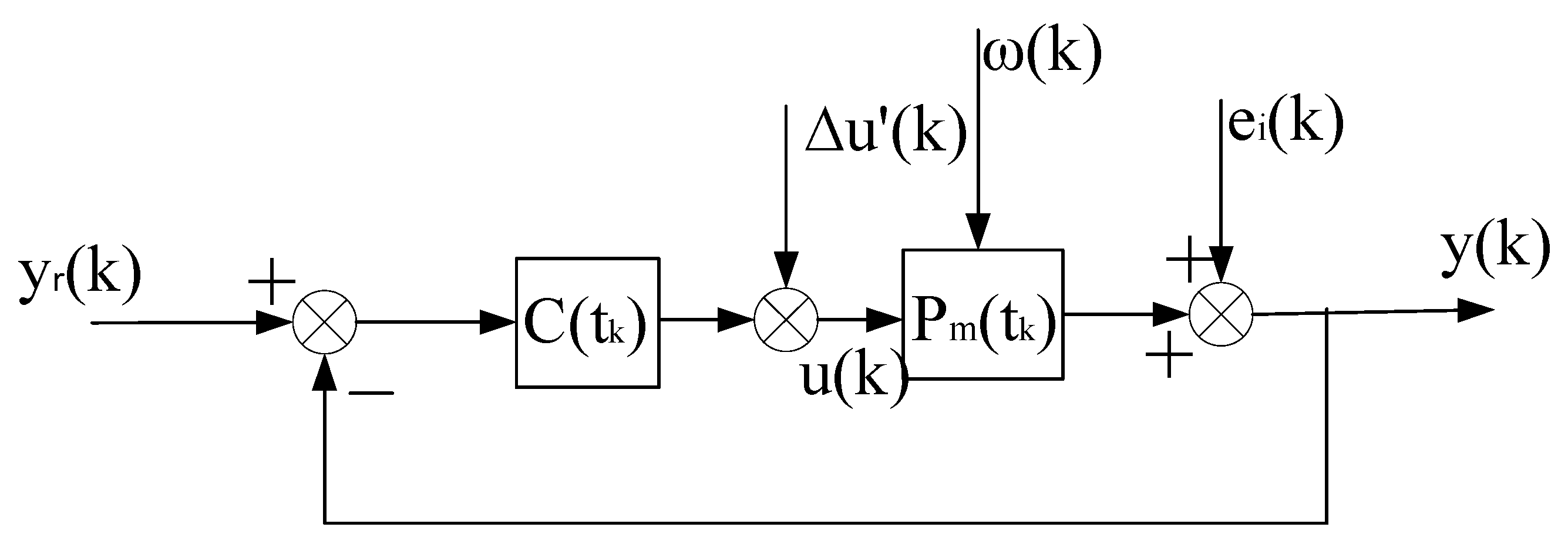
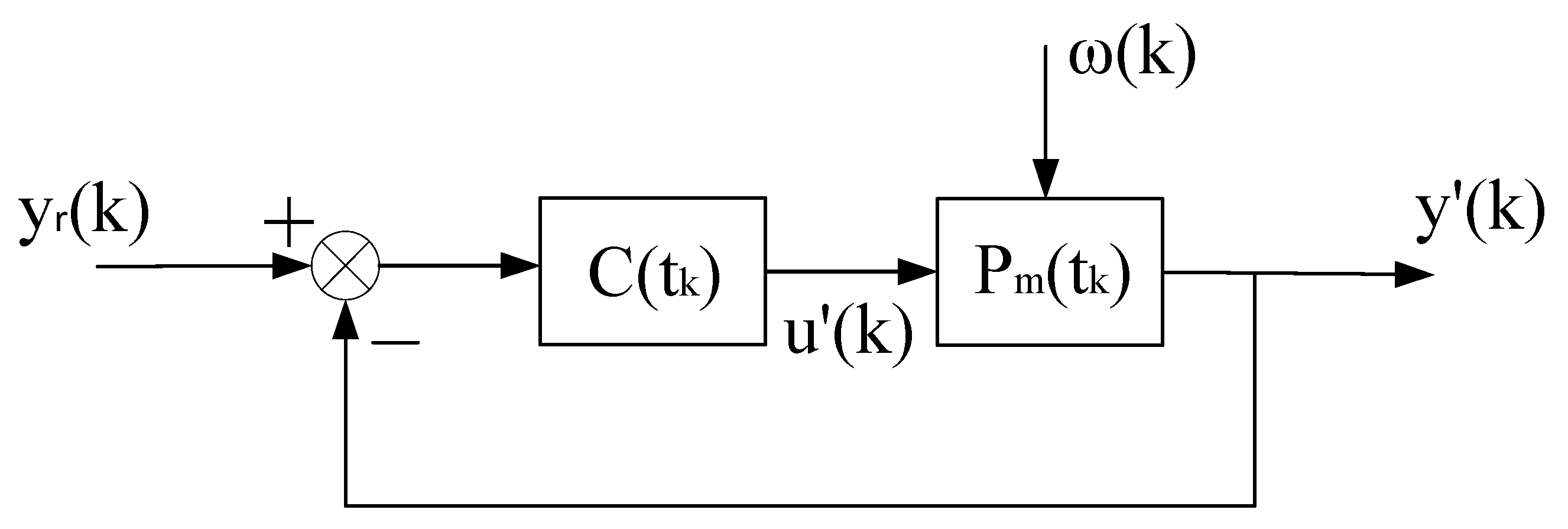
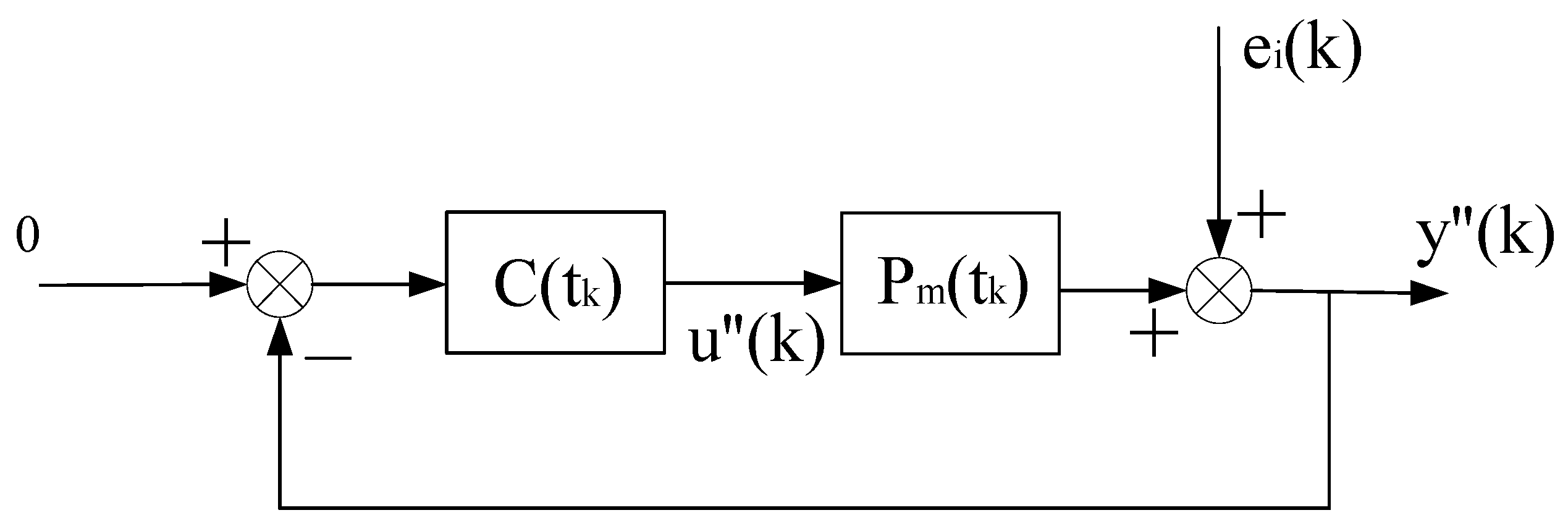
2. Virtual Equivalent System of Stochastic Self-Tuning Control System
3. Main Results
3.1. Parameter Estimation Converges to the True Value
3.2. Parameter Estimation Converges to Non-True Value
- (1)
- The parameter estimate converges to , the estimated model is consistently controllable,
- (2)
- The control strategy satisfies the stability requirements for the known objects of the parameters;
- (3)
- The mappingis continuous at.Then, the self-tuning control system is stable and convergent.
3.3. Parameter Estimation May Not Converge
- (1)
- is Hurwitz stable polynomial, and.
- (2)
- Control strategyexists.
- (3)
- Parameter estimation satisfies.,is a non-zero constant.The self-tuning control system is then stable and convergent.
- (1)
- is a Hurwitz stable polynomial, and.
- (2)
- Control lawexists.
- (3)
- The parameter estimation error is bounded; that is,, then the self-tuning control system is stable.
- (1)
- ,,is a finite value.
- (2)
- ,is a non-zero constant.
- (3)
- The control strategy satisfies the stability requirements for the known parameters and tracks the reference signal
- (4)
- The controller parameter is a continuous function of the parameter estimates; that is,is a continuous function of.
- If the above conditions are met, the self-tuning control system is stable and convergent.
- (1)
- , , is a finite value.
- (2)
- .
- (3)
- The control strategy satisfies the stability requirements for the known objects of the parameters and tracks the reference.
- (4)
- The controller parameter is a continuous function of the parameter estimate; that is,is a continuous function of.
4. Extended Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Goodwin, G.C.; Sin, K.S. Adaptive Filtering, Prediction and Control; Prentice Hall: Englewood, IL, USA, 1984. [Google Scholar]
- Goodwin, G.C.; Ramadge, P.J.; Caines, P.E. Discrete time adaptive control. SIAM J. Control Optim. 1981, 19, 829–853. [Google Scholar] [CrossRef]
- Bidikli, B.; Bayrak, A. A self-tuning robust full-state feedback control design for the magnetic levitation system. Control Eng. Pract. 2018, 78, 175–185. [Google Scholar] [CrossRef]
- Zou, Z.; Zhao, D.; Liu, X.; Guo, Y.; Guan, C.; Feng, W.; Guo, N. Pole-placement self-tuning control of nonlinear Hammerstein system and its application to pH process control. Chin. J. Chem. Eng. 2015, 23, 1364–1368. [Google Scholar] [CrossRef]
- Guo, L.; Chen, H.F. Stability and Optimality of Self-tuning Regulator. Sci. China (Ser. A) 1991, 9, 905–913. [Google Scholar]
- Guo, L.; Chen, H.F. The Astrom-Wittenmark self-tuning regulator revisited and ELS-based adaptive trackers. IEEE Trans. Autom. Control 1991, 36, 802–812. [Google Scholar]
- Guo, L. Self-convergence of weighted least-squares with applications to stochastic adaptive control. IEEE Trans. Autom. Control 1996, 41, 79–89. [Google Scholar]
- Nassiri-Toussi, K.; Ren, W. Indirect adaptive pole-placement control of MIMO stochastic systems: Self-tuning results. IEEE Trans. Autom. Control 1997, 42, 38–52. [Google Scholar] [CrossRef]
- Yagmur, O. Clonal selection algorithm based control for two-wheeled self-balancing mobile robot. Simul. Model. Pract. Theory 2022, 118, 102552. [Google Scholar]
- Dario, R. Pole-zero assignment by the receptance method: Multi-input active vibration control. Mech. Syst. Signal Process. 2022, 172, 108976. [Google Scholar]
- Anderson, B.D.O.; Johnstone, R.M.G. Global adaptive pole positioning. IEEE Trans. Autom. Control 1985, 30, 11–22. [Google Scholar] [CrossRef]
- Elliott, H.; Cristi, R.; Das, M. Global stability of adaptive pole placement algorithms. IEEE Trans. Autom. Control 1985, 30, 348–356. [Google Scholar] [CrossRef]
- Lozano, R.; Zhao, X.H. Adaptive pole placement without excitation probing signals. IEEE Trans. Autom. Control 1994, 39, 47–58. [Google Scholar] [CrossRef]
- Chan, C.Y.; Sirisena, H.R. Convergence of adaptive pole-zero placement controller for stable non-minimum phase systems. Int. J. Control 1989, 50, 743–754. [Google Scholar] [CrossRef]
- Lai, T.L.; Wei, C.Z. Extended least squares and their applications to adaptive control and prediction in linear systems. IEEE Trans. Autom. Control 1986, 31, 898–906. [Google Scholar]
- Chen, H.F.; Guo, L. Asymptotically optimal adaptive control with consistent parameter estimates. SIAM J. Control. Optim. 1987, 25, 558–575. [Google Scholar] [CrossRef]
- Wittenmark, B.; Middleton, R.H.; Goodwin, G.C. Adaptive decoupling of multivariable systems. Int. J. Control 1987, 46, 1993–2009. [Google Scholar] [CrossRef]
- Chai, T.Y. The global convergence analysis of a multivariable decoupling self-tuning controller. Acta Autom. Sin. 1989, 15, 432–436. [Google Scholar]
- Chai, T.Y. Direct adaptive decoupling control for general stochastic multivariable systems. Int. J. Control 1990, 51, 885–909. [Google Scholar] [CrossRef]
- Chai, T.Y.; Wang, G. Globally convergent multivariable adaptive decoupling controller and its application to a binarydistillation column. Int. J. Control 1992, 55, 415–429. [Google Scholar] [CrossRef]
- Patete, A.; Furuta, K.; Tomizuka, M. Stability of self-tuning control based on Lyapunov function. Int. J. Adapt. Control. Signal Process. 2008, 22, 795–810. [Google Scholar] [CrossRef]
- Zhang, W. On the stability and convergence of self-tuning control–virtual equivalent system approach. Int. J. Control 2010, 83, 879–896. [Google Scholar] [CrossRef]
- Fekri, S.; Athans, M.; Pascoal, A. Issues, progress and new results in robust adaptive control. Int. J. Adapt. Control. Signal Process. 2006, 20, 519–579. [Google Scholar] [CrossRef]
- Wang, Y.; Li, P.; Tang, J. MPPT control of photovoltaic power generation system based on fuzzy parameter self-tuning PID method. Electr. Power Autom. Equip. 2008, 28, 4. [Google Scholar]
- Tang, L.; Xu, Z. The Control Technology of Self-correction for Intelligent AC Contactors. Proc. CSEE 2015, 35, 1516–1523. [Google Scholar]
- Chen, S.; Wu, J.; Yang, B.; Ma, J. A Self-Tuning Control Method for Simulation Turntable Based on Precise Identification of Model Parameters. CN Patent 201710271289.4, 18 February 2020. [Google Scholar]
- Shao, K.; Zheng, J.; Wang, H.; Wang, X.; Lu, R.; Man, Z. Tracking Control of a Linear Motor Positioner Based on Barrier Function Adaptive Sliding Mode. IEEE Trans. Ind. Inform. 2021, 17, 7479–7488. [Google Scholar] [CrossRef]
- Nassiri-Toussi, K.; Ren, W. A unified analysis of stochastic adaptive control: Potential self-tuning. In Proceedings of the American Control Conference, Seattle, DC, USA, 21–23 June 1995. [Google Scholar]
- Nassiri-Toussi, K.; Ren, W. A unified analysis of stochastic adaptive control: Asymptotic self-tuning. In Proceedings of the 34th IEEE Conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; p. 3. [Google Scholar]
- Morse, A.S. Towards a unified theory of parameter adaptive control: Tunability. IEEE Trans. Autom. Control 1990, 35, 1002–1012. [Google Scholar] [CrossRef]
- Morse, A.S. Towards a unified theory of parameter adaptive control-part II: Certainty equivalence and implicit tuning. IEEE Trans. Autom. Control 1992, 37, 15–29. [Google Scholar] [CrossRef]
- Katayama, T.; McKelvey, T.; Sano, A.; Cassandras, C.G.; Campi, M.C. Trends in systems and signals. Annu. Rev. Control 2006, 30, 5–17. [Google Scholar] [CrossRef]
- Li, Q.Q. Adaptive control. Comput. Autom. Meas. Control 1999, 7, 56–60. [Google Scholar]
- Li, Q.Q. Adaptive Control System Theory, Design and Application; Science Press: Beijing, China, 1990. [Google Scholar]
- Aström, K.J.; Wittenmark, B. Adaptive Control; Addison-Wesley: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Kumar, P.R. Convergence of adaptive control schemes using least-squares parameter estimates. IEEE Trans. Autom. Control 1990, 35, 416–424. [Google Scholar] [CrossRef]
- van Schuppen, J.H. Tuning of Gaussian stochastic control systems. IEEE Trans. Autom. Control 1994, 39, 2178–2190. [Google Scholar] [CrossRef]
- Zhang, W.C. The convergence of parameter estimates is not necessary for a general self-tuning control system-stochasticplant. In Proceedings of the 48th IEEE Conference on Decision and Control, Shanghai, China, 15–18 December 2009. [Google Scholar]
- Zhang, W.C.; Li, X.L.; Choi, J.Y. A unified analysis of switching multiple model adaptive control—Virtual equivalent system approach. In Proceedings of the 17th IFAC World Congress, Seoul, Republic of Korea, 6–11 July 2008; Volume 41, pp. 14403–14408. [Google Scholar]
- Zhang, W.C. Virtual equivalent system theory for self-tuning control. J. Harbin Inst. Technol. 2014, 46, 107–112. [Google Scholar]
- Feng, C.; Shi, W. Adaptive Control; Publishing House of Electronics Industry: Beijing, China, 1986. [Google Scholar]
- Chatterjee, D.; Liberzon, D. Stability analysis of deterministic and stochastic switched systems via a comparison principle and multiple Lyapunov functions. SIAM J. Control. Optim. 2006, 45, 174–206. [Google Scholar] [CrossRef]
- Chatterjee, D.; Liberzon, D. On stability of stochastic switched systems. In Proceedings of the 43rd Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004; Volume 4, pp. 4125–4127. [Google Scholar]
- Prandini, M. Switching control of stochastic linear systems: Stability and performance results. In Proceedings of the 6th Congress of SIMAI, Chia Laguna, Cagliari, Italy, 27–31 May 2002. [Google Scholar]
- Prandini, M.; Campi, M.C. Logic-based switching for the stabilization of stochastic systems in presence of unmodeled dynamics. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001. [Google Scholar]
- Zhang, W.C.; Wei, W. Virtual equivalent system theory for adaptive control and simulation verification. Sci. Sin. Inf. 2018, 48, 947–962. [Google Scholar] [CrossRef] [Green Version]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, J.; Peng, K.; Zhang, W. From Nonlinear Dominant System to Linear Dominant System: Virtual Equivalent System Approach for Multiple Variable Self-Tuning Control System Analysis. Entropy 2023, 25, 173. https://doi.org/10.3390/e25010173
Pan J, Peng K, Zhang W. From Nonlinear Dominant System to Linear Dominant System: Virtual Equivalent System Approach for Multiple Variable Self-Tuning Control System Analysis. Entropy. 2023; 25(1):173. https://doi.org/10.3390/e25010173
Chicago/Turabian StylePan, Jinghui, Kaixiang Peng, and Weicun Zhang. 2023. "From Nonlinear Dominant System to Linear Dominant System: Virtual Equivalent System Approach for Multiple Variable Self-Tuning Control System Analysis" Entropy 25, no. 1: 173. https://doi.org/10.3390/e25010173