
Degrees of Freedom of a K-User Interference Channel in the Presence of an Instantaneous Relay


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
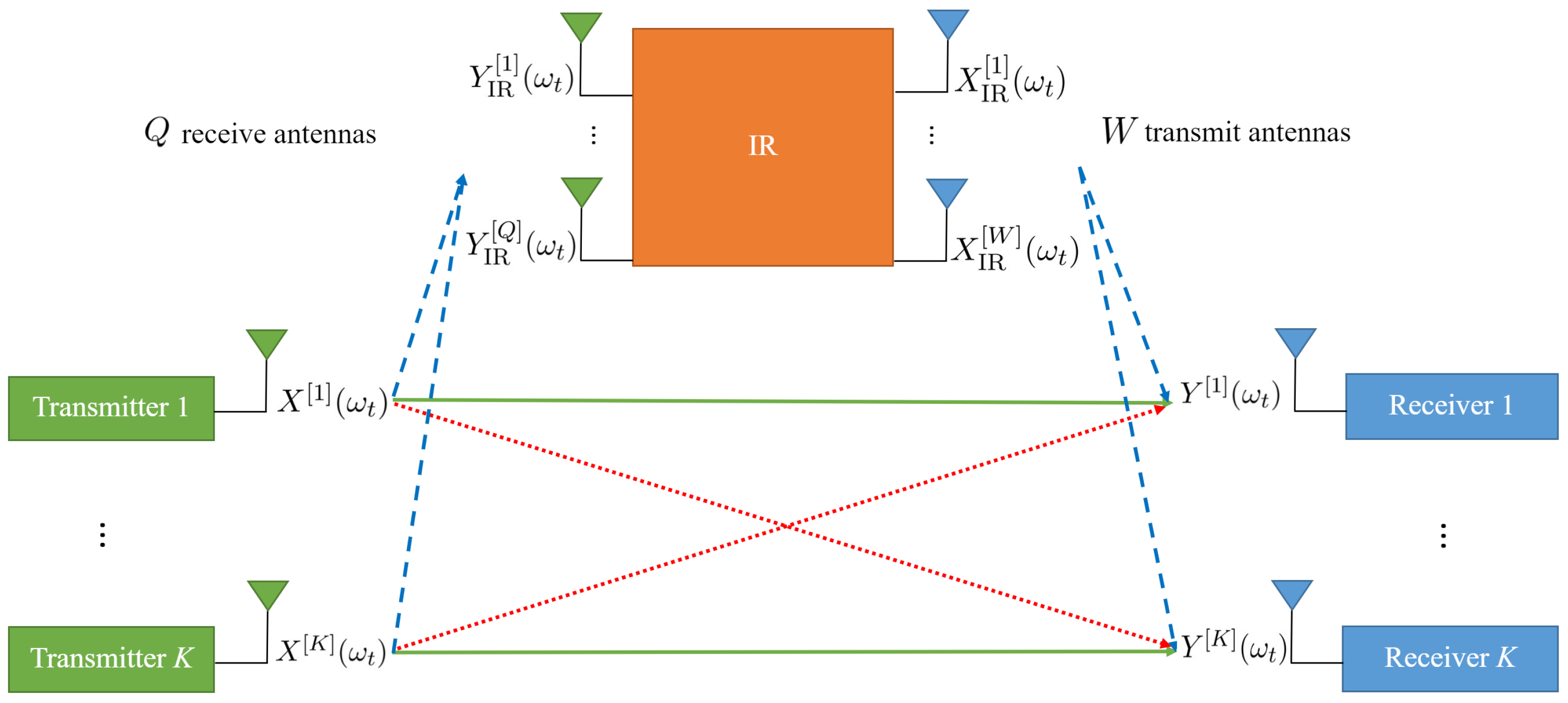
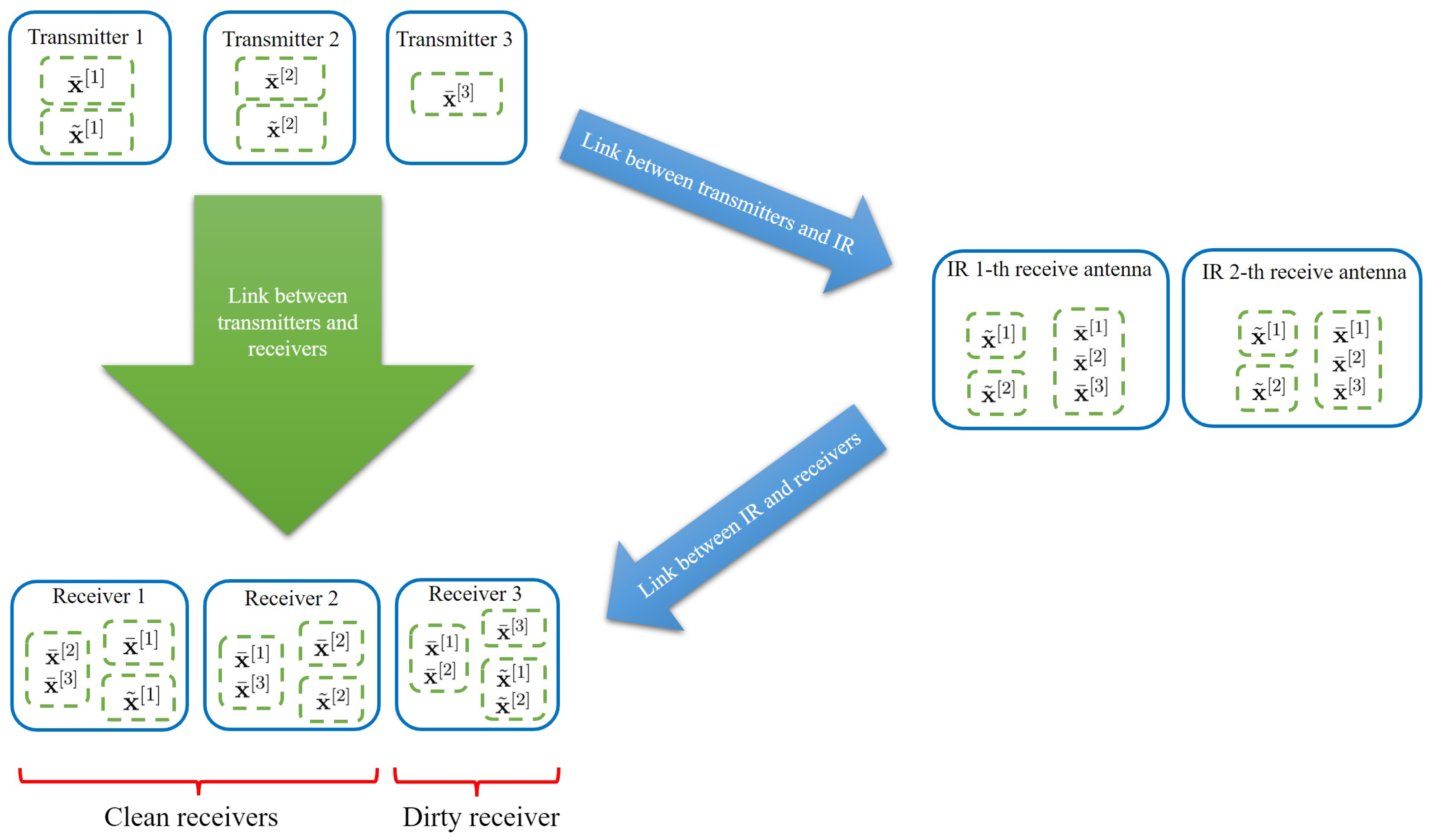
- We provide lower and upper bounds for the sum DoF of a K-user interference channel in the presence of a MIMO IR with Q receiving antennas and W transmitting antennas, which can coordinate with each other, i.e., each transmit antenna has access to all receiving antennas. For this purpose, we propose an interference alignment-based coding scheme in which we divide the receivers into two groups called clean and dirty receivers. We design beamforming vectors such that some message symbols corresponding to the clean receivers can be de-multiplexed at the IR. By de-multiplexing, we mean that the IR separates only some of the message symbols using linear operations without removing additive noise. Then, the IR utilizes the de-multiplexed symbols for an interference cancellation at the clean receivers. Our proposed scheme increases the DoF for compared to a case without an IR. Moreover, we show that if the number of IR antennas exceeds a finite threshold, the maximum DoF of K can be achieved, and we characterize this threshold.
- Moreover, we derive lower and upper bounds for the sum DoF for a special kind of IR for which the IR has the same number of receiving and transmitting antennas and the antennas do not have coordination with each other, i.e., the i-th transmitting antenna has access to the i-th receiving antenna only. We extend the coding scheme for this case and derive an achievable DoF. Similar to a coordinated IR, we show that by considering a number of IR antennas more than a finite threshold, the maximum DoF of K can be achieved. Our derivations show that the achievable DoF decreases considerably compared with the coordinated IR.
2. System Model and Preliminaries
2.1. System Model
2.2. Preliminaries
3. -User Interference Channel in the Presence of MIMO C-IR
- Similar to , diagonal elements are independent random variables for different because the channel coefficients are independent random variables for each .
- Each diagonal element is a fractional polynomial constructed by the matrices . A fractional polynomial is the ratio of the polynomial to the non-zero polynomial .
- is a diagonal matrix.
- .
- For , its t-th diagonal element has the following form:where indicates a fractional polynomial constructed from the variables .
4. -User Interference Channel in the Presence of NC-IR
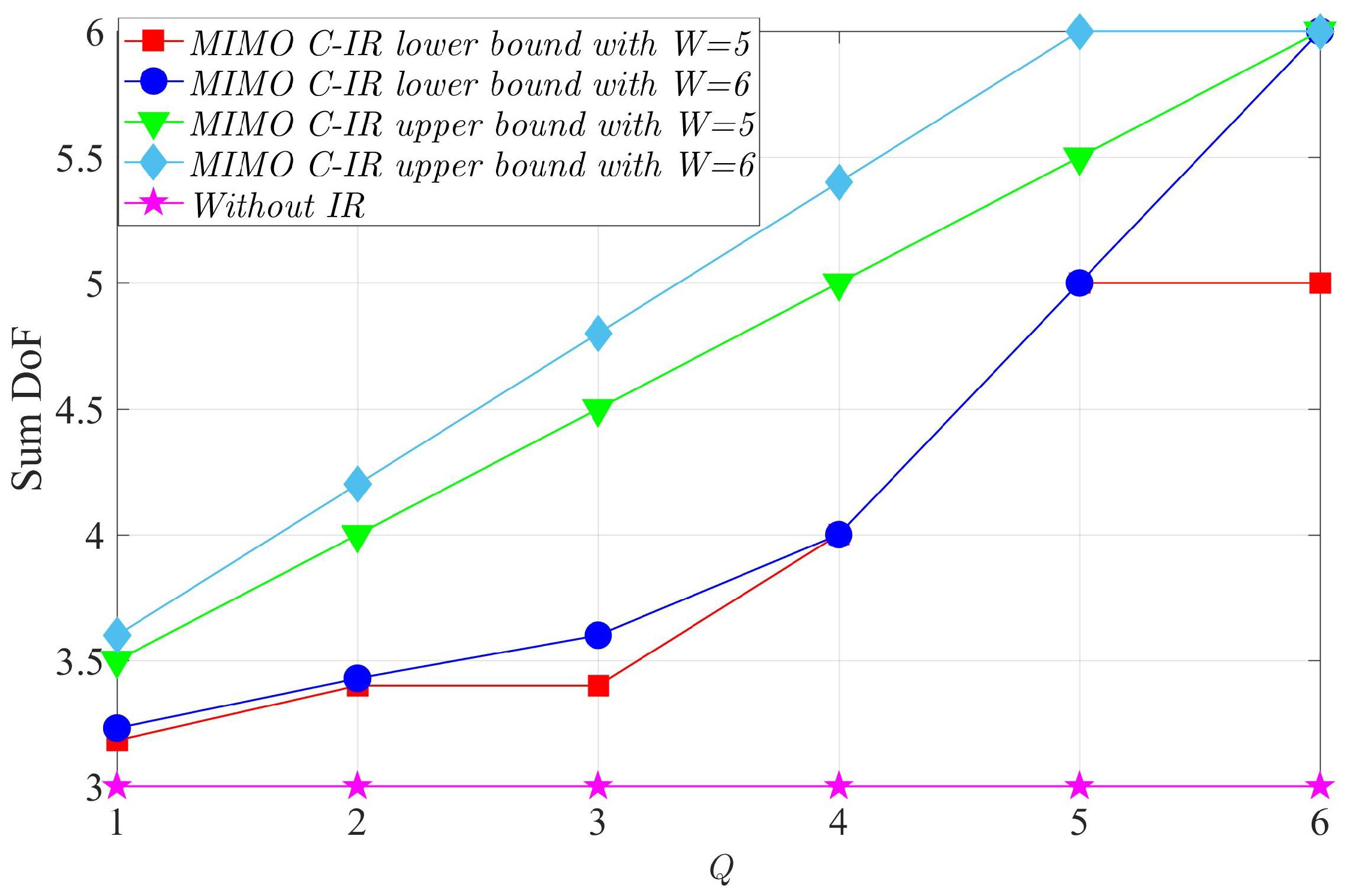
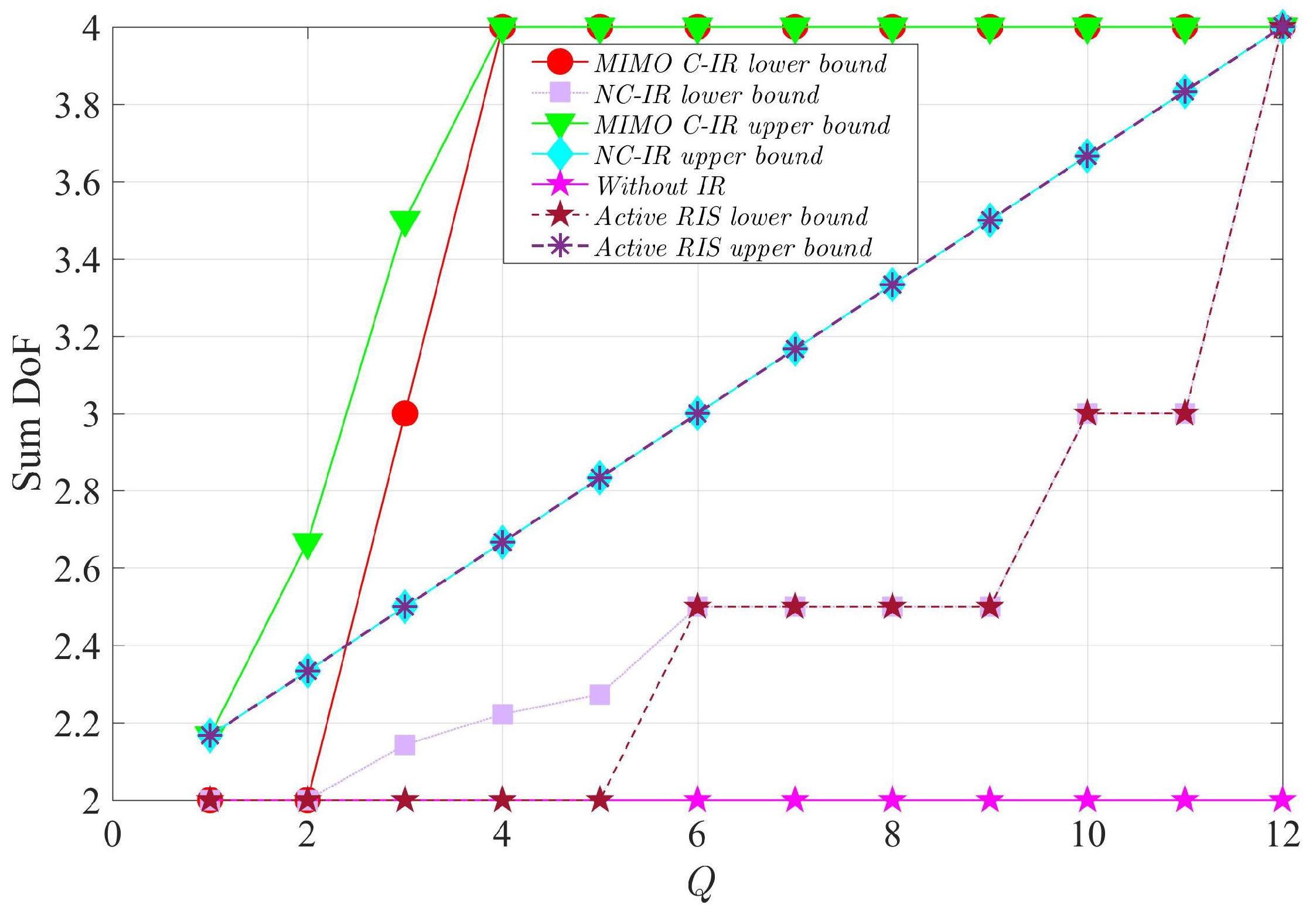
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
Appendix F
References
- Cadambe, V.R.; Jafar, S.A. Interference alignment and the degrees of freedom of the K-User interference channel. IEEE Trans. Inf. Theory 2008, 54, 2334–2344. [Google Scholar] [CrossRef] [Green Version]
- El Gamal, A.; Hassanpour, N. Relay-without-delay. In Proceedings of the International Symposium on Information Theory (ISIT), Adelaide, SA, Australia, 4–9 September 2005. [Google Scholar]
- Lee, N.; Wang, C. Aligned interference neutralization and the degrees of freedom of the two-user wireless networks with an instantaneous relay. IEEE Trans. Commun. 2013, 61, 3611–3619. [Google Scholar] [CrossRef]
- Cadambe, V.R.; Jafar, S.A. Degrees of freedom of wireless networks with relays, feedback, cooperation, and full duplex operation. IEEE Trans. Inf. Theory 2009, 55, 2334–2344. [Google Scholar] [CrossRef]
- Di Renzo, M.; Debbah, M.; Phan-Huy, D.T.; Zappone, A.; Alouini, M.S.; Yuen, C.; Sciancalepore, V.; Alexandropoulos, G.C.; Hoydis, J.; Gacanin, H.; et al. Smart radio environments empowered by AI reconfigurable meta-surfaces: An idea whose time has come. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 129. [Google Scholar] [CrossRef] [Green Version]
- El Gamal, A.; Hassanpour, N.; Mammen, J. Relay networks with delays. IEEE Trans. Inf. Theory 2007, 53, 3413–3431. [Google Scholar] [CrossRef]
- Salimi, A.; Mirmohseni, M.; Aref, M.R. A new capacity upper bound for “relay-with-delay” channel. In Proceedings of the International Symposium on Information Theory (ISIT), Seoul, Korea, 28 June–3 July 2009. [Google Scholar]
- Chang, H.; Chung, S.-Y.; Kim, S. Interference channel with a causal relay under strong and very strong interference. IEEE Trans. Inf. Theory 2014, 60, 859–865. [Google Scholar] [CrossRef]
- Ho, Z.K.M.; Jorswieck, E.A. Instantaneous relaying: Optimal strategies and interference neutralization. IEEE Trans. Signal Process. 2012, 60, 6655–6668. [Google Scholar] [CrossRef] [Green Version]
- Baik, I.-J.; Chung, S.-Y. Causal relay networks. IEEE Trans. Inf. Theory 2015, 61, 5432–5440. [Google Scholar] [CrossRef]
- Kramer, G. Information networks with in-block memory. IEEE Trans. Inf. Theory 2014, 60, 2105–2120. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhang, R. Capacity characterization for intelligent reflecting surface aided MIMO communication. IEEE J. Sel. Areas Commun. 2020, 38, 1823–1838. [Google Scholar] [CrossRef]
- Karasik, R.; Simeone, O.; Di Renzo, M.; Shamai, S. Beyond Max-SNR: Joint encoding for reconfigurable intelligent surfaces. In Proceedings of the International Symposium on Information Theory (ISIT), Los Angeles, CA, USA, 21–26 June 2020. [Google Scholar]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Al-Dhahir, N. Exploiting intelligent reflecting surfaces in NOMA networks: Joint beamforming optimization. IEEE Trans. Wirel. Commun. 2020, 19, 6884–6898. [Google Scholar] [CrossRef]
- Ozdogan, O.; Bjornson, E.; Larsson, E.G. Using intelligent reflecting surfaces for rank improvement in MIMO communications. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Maddah-Ali, M.A.; Motahari, A.S.; Khandani, A.K. Communication over MIMO X channels: Interference alignment, decomposition, and performance analysis. IEEE Trans. Inf. Theory 2008, 54, 3457–3470. [Google Scholar] [CrossRef]
- Gou, T.; Jafar, S.A. Degrees of freedom of the K user M × N MIMO interference channel. IEEE Trans. Inf. Theory 2010, 56, 6040–6057. [Google Scholar] [CrossRef] [Green Version]
- Ke, L.; Ramamoorthy, A.; Wang, Z.; Yin, H. Degrees of freedom region for an interference network with general message demands. IEEE Trans. Inf. Theory 2012, 58, 3787–3797. [Google Scholar] [CrossRef]
- Khalil, M.; Khattab, T.; El-Keyi, A.; Nafie, M. On the degrees of freedom region of the M × N interference channel. In Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering, Vancouver, BC, Canada, 15–18 May 2016. [Google Scholar]
- Ruan, L.; Lau, V.K.N. Dynamic interference mitigation for generalized partially connected quasi-static MIMO interference channel. IEEE Trans. Signal Process. 2011, 59, 3788–3798. [Google Scholar] [CrossRef] [Green Version]
- Khatiwada, M.; Choi, S.W. On the interference management for K-user partially connected fading interference channels. IEEE Trans. Commun. 2012, 60, 3717–3725. [Google Scholar] [CrossRef]
- Gou, T.; da Silva, C.R.C.M.; Lee, J.; Kang, I. Partially connected interference networks with No CSIT: Symmetric degrees of freedom and multicast across alignment blocks. IEEE Commun. Lett. 2013, 17, 1893–1896. [Google Scholar] [CrossRef]
- Liu, T.; Yang, C. On the degrees of freedom of partially-connected symmetrically-configured MIMO interference broadcast channels. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Florence, Italy, 4–9 May 2014. [Google Scholar]
- Liu, G.; Sheng, M.; Wang, X.; Jiao, W.; Li, Y.; Li, J. Interference alignment for partially connected downlink MIMO heterogeneous networks. IEEE Trans. Commun. 2015, 63, 551–564. [Google Scholar] [CrossRef]
- Liu, W.; Cai, J.; Li, J.; Sheng, M. Interference alignment with finite extensions in partially connected networks. IEEE Trans. Commun. 2017, 65, 851–862. [Google Scholar] [CrossRef]
- Zhao, N.; Yu, F.R.; Jin, M.; Yan, Q.; Leung, V.C. Interference alignment and its applications: A survey, research issues, and challenges. IEEE Commun. Soc. Mag. 2016, 18, 1779–1803. [Google Scholar] [CrossRef]
- Wang, Q.; Shu, Y.; Dong, M.; Xu, J.; Tao, X. Degrees of freedom of 3-user MIMO interference channels with instantaneous relay using interference alignment. KSII Trans. Internet Inf. Syst. 2015, 9, 1624–1641. [Google Scholar]
- Cheng, Z.; Devroye, N.; Liu, T. The degrees of freedom of fullduplex bidirectional interference networks with and without a MIMO relay. IEEE Trans. Wirel. Commun. 2016, 15, 2912–2924. [Google Scholar] [CrossRef]
- Liu, T.; Tuninetti, D.; Chung, S.Y. On the DoF region of the MIMO Gaussian two-user interference channel with an instantaneous relay. IEEE Trans. Inf. Theory 2017, 63, 4453–4471. [Google Scholar] [CrossRef]
- Azari, A. On the DoF and secure DoF of K-user MIMO interference channel with instantaneous relays. Wirel. Netw. 2020, 26, 1921–1936. [Google Scholar] [CrossRef] [Green Version]
- Abdollahi Bafghi, A.H.; Jamali, V.; Nasiri-Kenari, M.; Schober, R. Degrees of freedom of the K-user interference channel assisted by active and passive IRSs. IEEE Trans. Commun. 2022, 70, 3063–3080. [Google Scholar] [CrossRef]
- Jiang, T.; Yu, W. Interference nulling using reconfigurable intelligent surface. IEEE J. Sel. Areas Commun. 2022, 40, 1392–1406. [Google Scholar] [CrossRef]
- Cadambe, V.R.; Jafar, S.A. Interference alignment and the degrees of freedom of wireless X-networks. IEEE Trans. Inf. Theory 2009, 55, 3893–3908. [Google Scholar] [CrossRef]
- Abdollahi Bafghi, A.H.; Jamali, V.; Nasiri-Kenari, M.; Schober, R. Degrees of freedom of the K-user interference channel in the presence of intelligent reflecting surfaces. arXiv 2020, arXiv:2012.13787. Available online: https://arxiv.org/abs/2012.13787 (accessed on 26 December 2020).
- Abdollahi Bafghi, A.H.; Mirmohseni, M.; Ashtiani, F.; Nasiri-Kenari, M. Joint optimization of power consumption and transmission delay in a cache-enabled C-RAN. IEEE Wirel. Commun. Lett. 2020, 9, 1137–1140. [Google Scholar] [CrossRef]
- Lagen, S.; Agustin, A.; Vidal, J. Coexisting linear and widely linear transceivers in the MIMO interference channel. IEEE Trans. Signal Process. 2016, 64, 652–664. [Google Scholar] [CrossRef] [Green Version]
- Soleymani, M.; Santamaria, I.; Schreier, P.J. Improper Gaussian signaling for the K-user MIMO interference channels with hardware impairments. IEEE Trans. Veh. Technol. 2020, 69, 11632–11645. [Google Scholar] [CrossRef]
- Cover, T.; Thomas, J.A. Elements of Information Theory; Wiley-Interscience: Hoboken, NJ, USA, 2006. [Google Scholar]
- Cadambe, V.R.; Jafar, S.A.; Wang, C. Interference alignment with asymmetric complex signaling—Settling the Høst–Madsen–Nosratinia conjecture. IEEE Trans. Inf. Theory 2010, 56, 4552–4565. [Google Scholar] [CrossRef]
- Medra, A.; Davidson, T.N. Widely linear interference alignment precoding. In Proceedings of the International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Toronto, ON, Canada, 22–25 June 2014. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdollahi Bafghi, A.H.; Mirmohseni, M.; Nasiri-Kenari, M. Degrees of Freedom of a K-User Interference Channel in the Presence of an Instantaneous Relay. Entropy 2022, 24, 1078. https://doi.org/10.3390/e24081078
Abdollahi Bafghi AH, Mirmohseni M, Nasiri-Kenari M. Degrees of Freedom of a K-User Interference Channel in the Presence of an Instantaneous Relay. Entropy. 2022; 24(8):1078. https://doi.org/10.3390/e24081078
Chicago/Turabian StyleAbdollahi Bafghi, Ali H., Mahtab Mirmohseni, and Masoumeh Nasiri-Kenari. 2022. "Degrees of Freedom of a K-User Interference Channel in the Presence of an Instantaneous Relay" Entropy 24, no. 8: 1078. https://doi.org/10.3390/e24081078