
A Machine Learning Approach for Gearbox System Fault Diagnosis


Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset
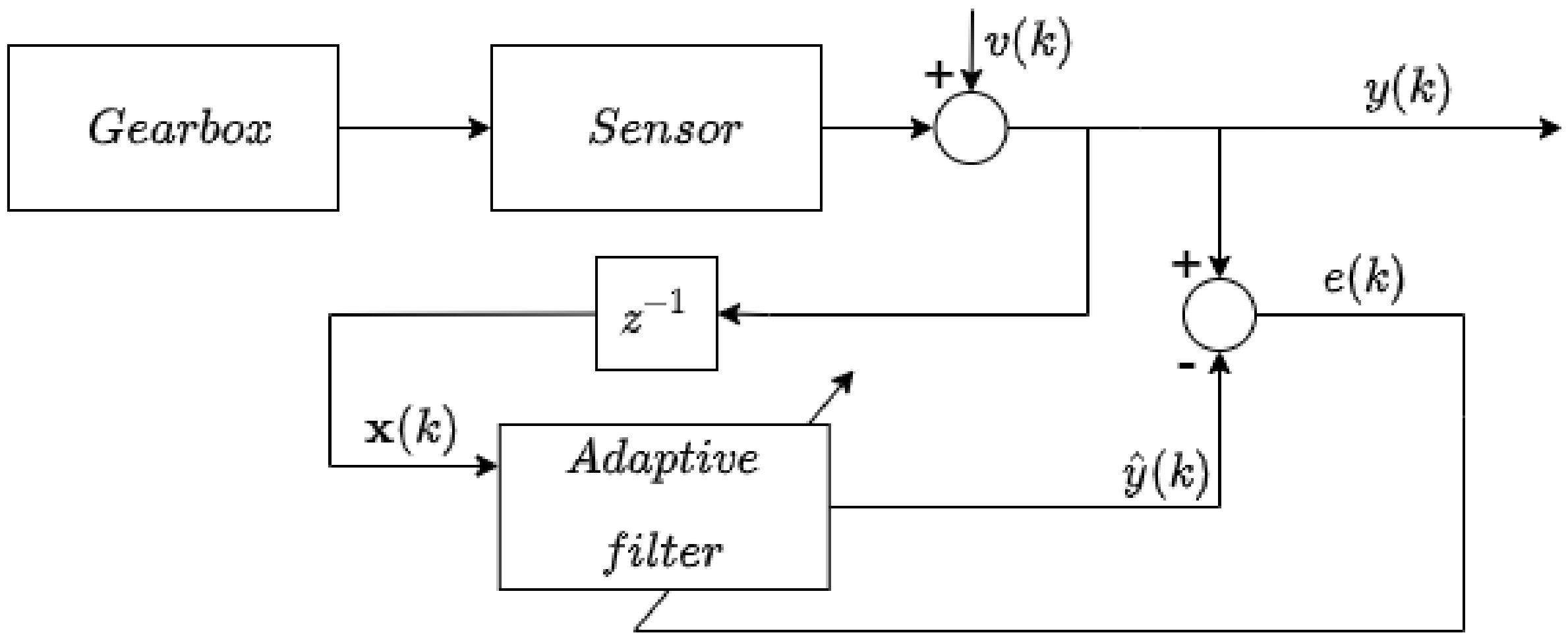
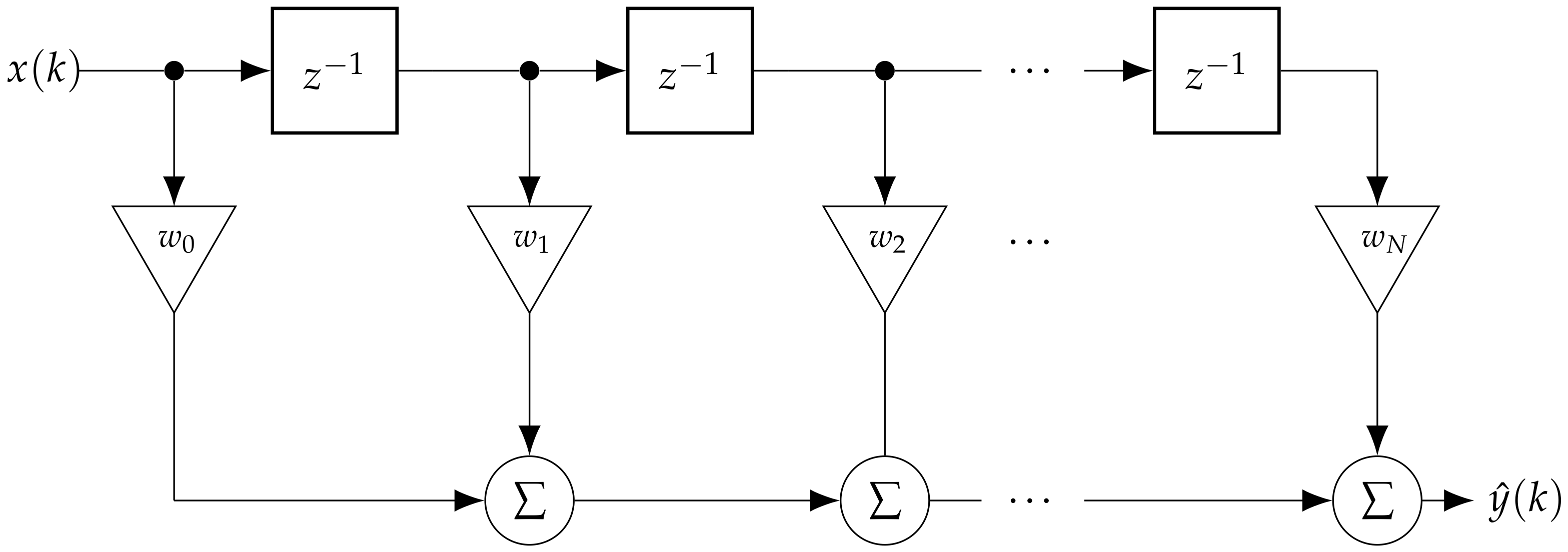
2.2. Adaptive Filter
2.3. The NLMS Algorithm
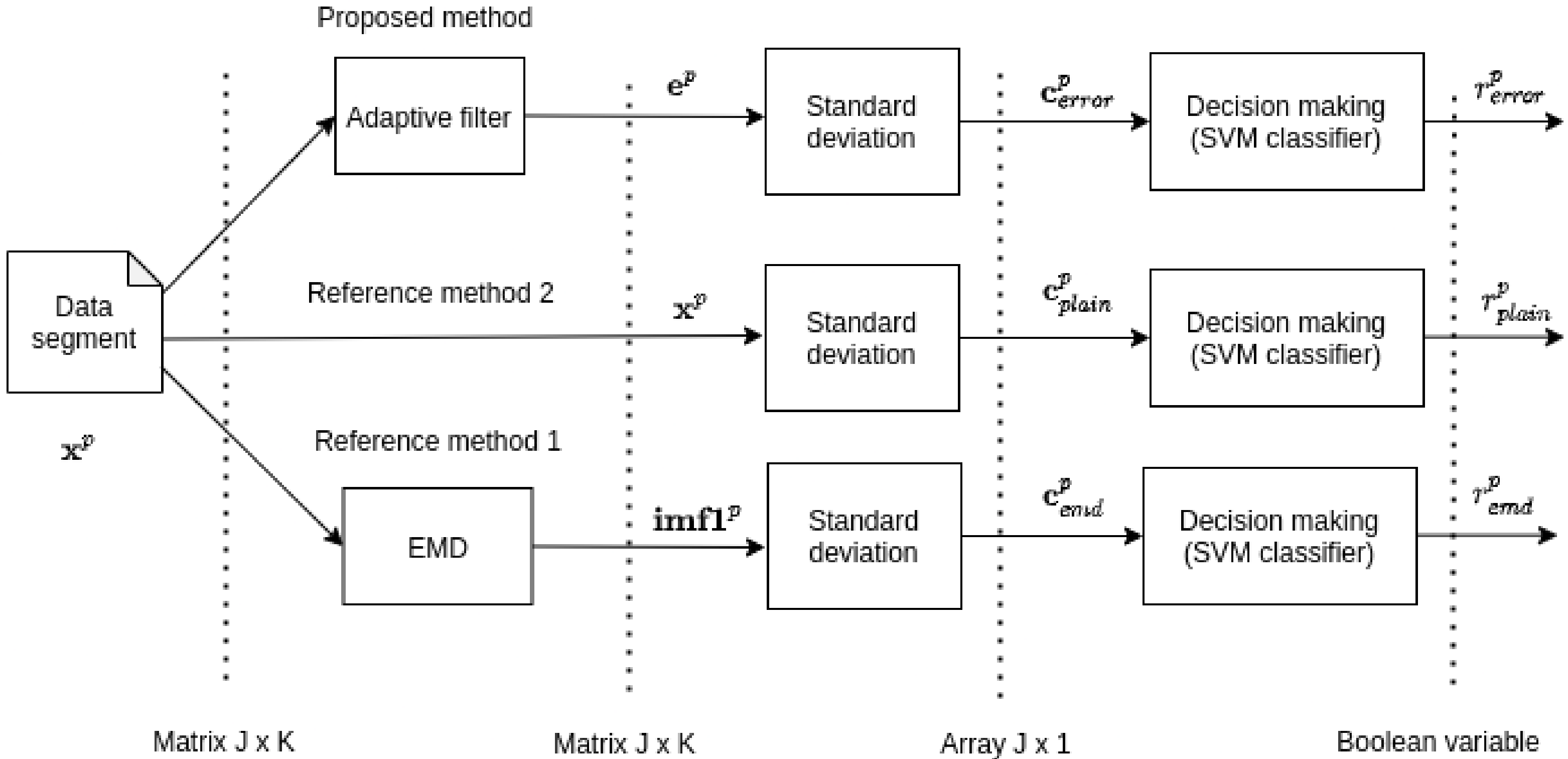
2.4. Proposed Descriptor
2.5. Reference Methods
2.5.1. Standard Deviation of the Raw Data
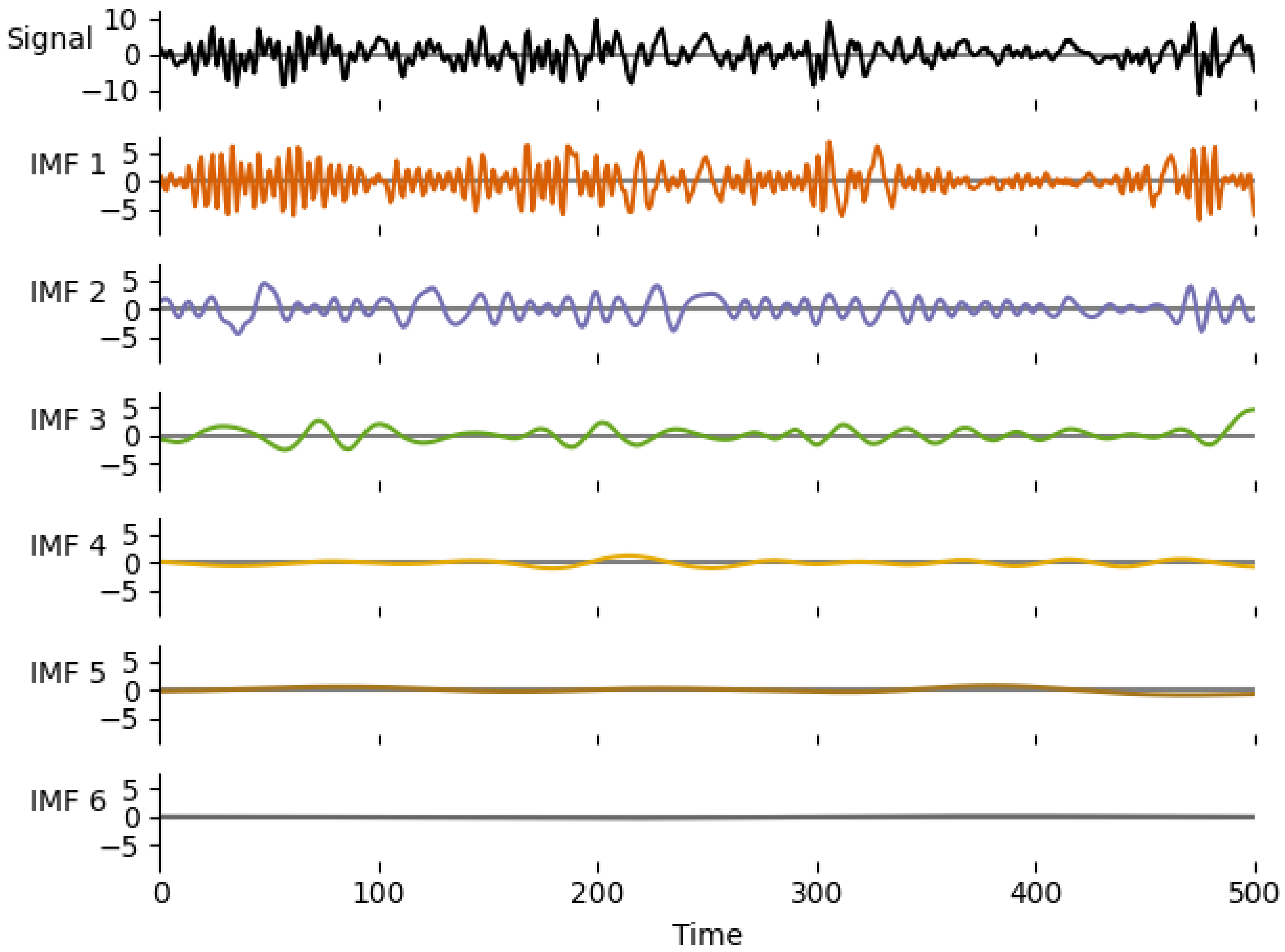
2.5.2. Standard Deviation of the First IMF
- 1.
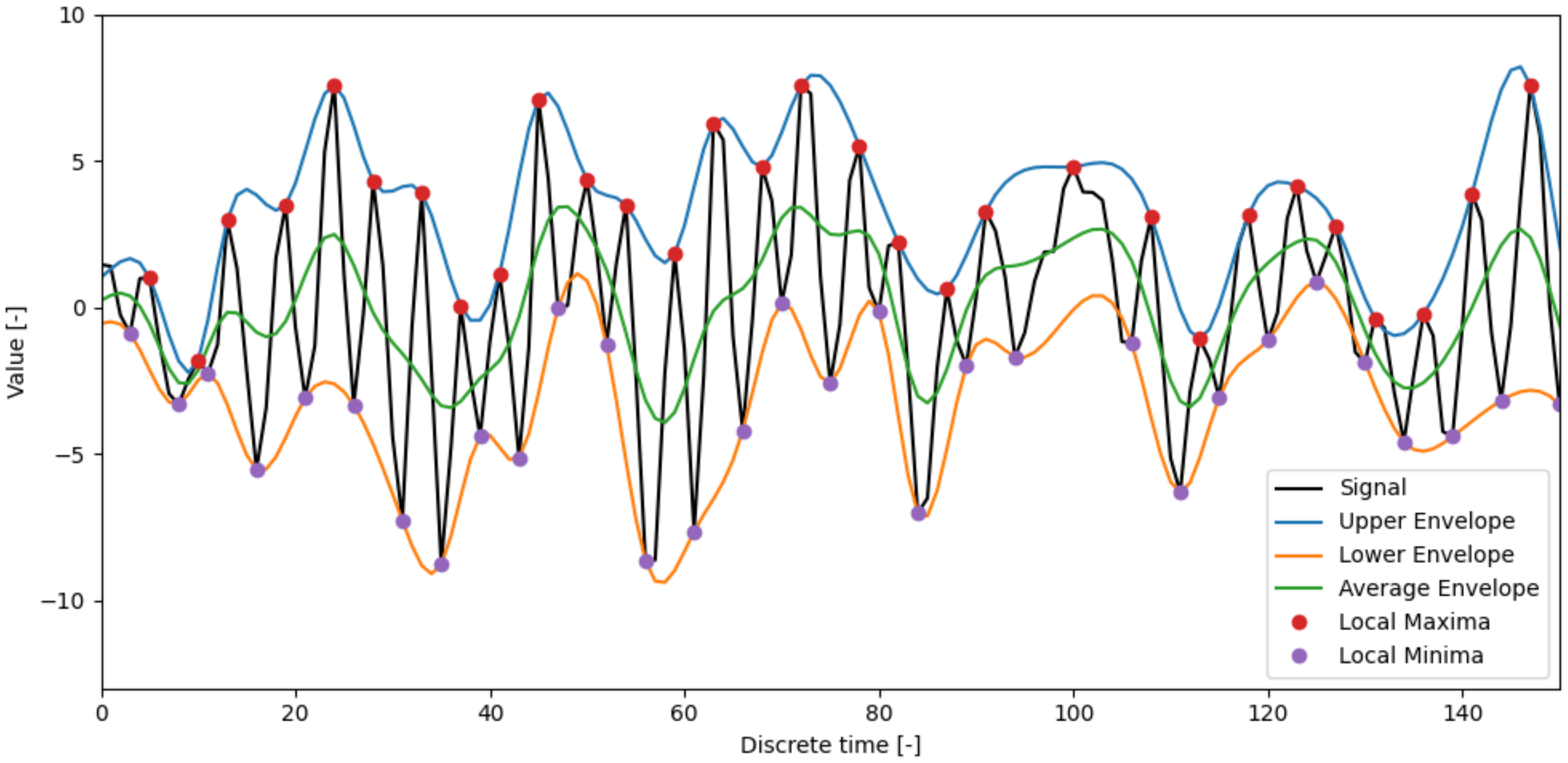
- Create upper and lower envelope—connect local minima/maxima by a cubic spline line.
- 2.
- Get the first component () from original signal and mean value () of lower and upper envelopes:The envelopes and local extremes of a gearbox signal sample are shown in Figure 4.
- 3.
- Repeat the previous step i times:
- 4.
- Obtain the first IMF
- 5.
- Repeat previous steps to get other IMFs.
2.6. Decision Making via SVM
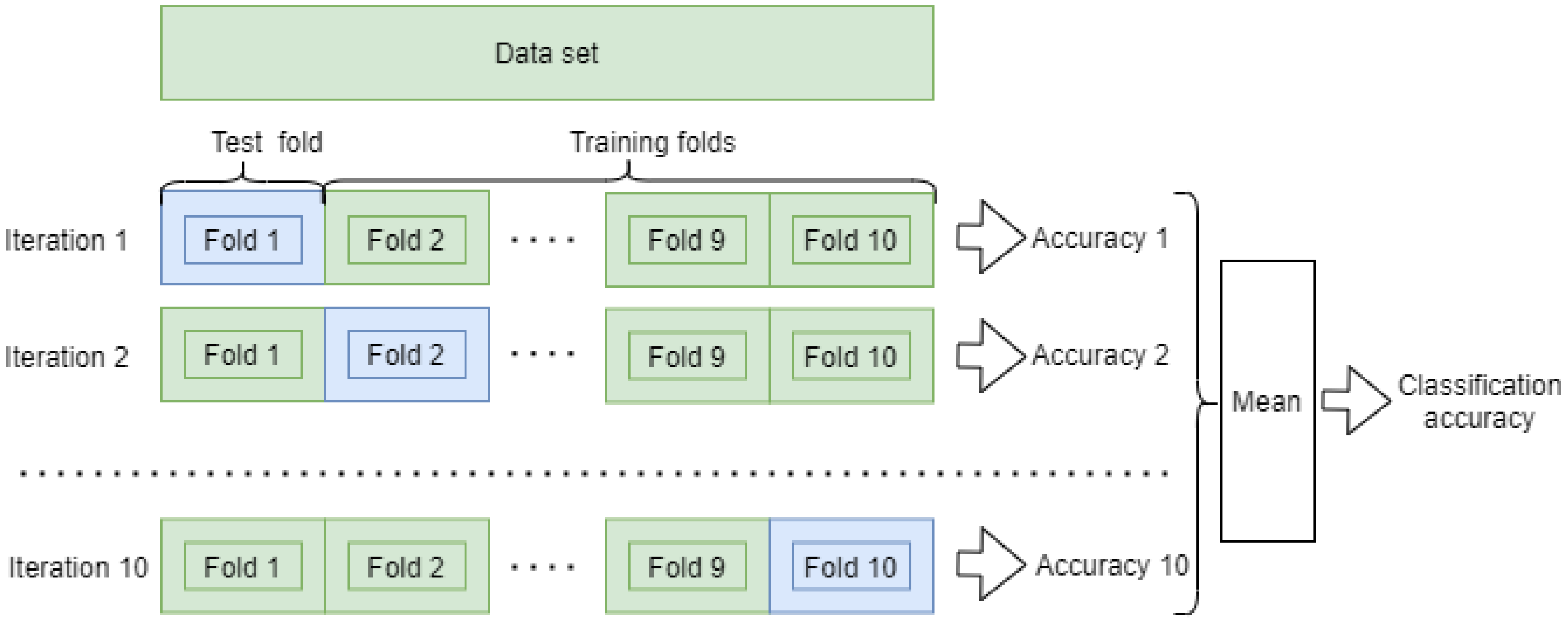
2.7. N-Fold Cross-Validation
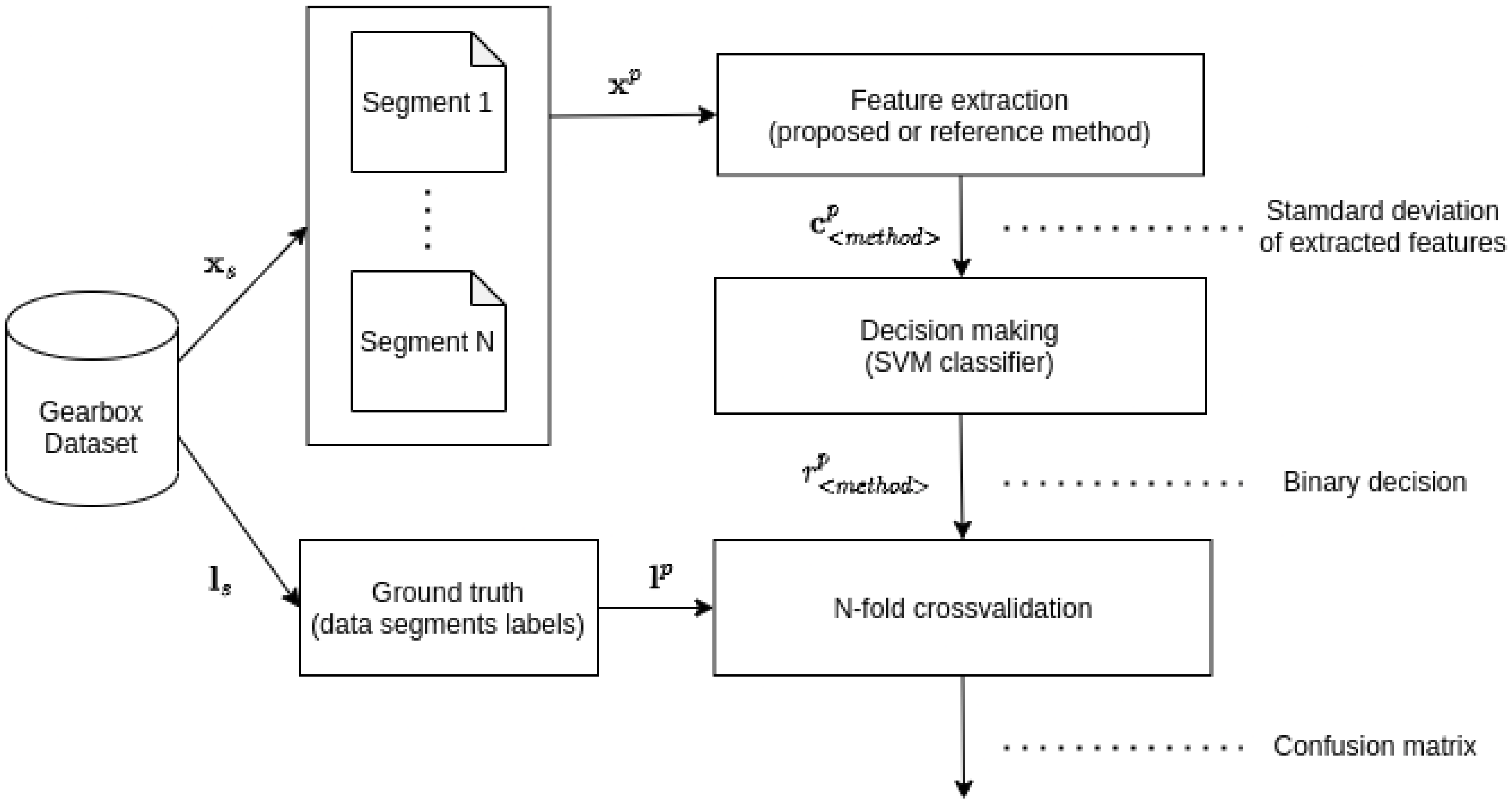
2.8. Experimental Framework Overview
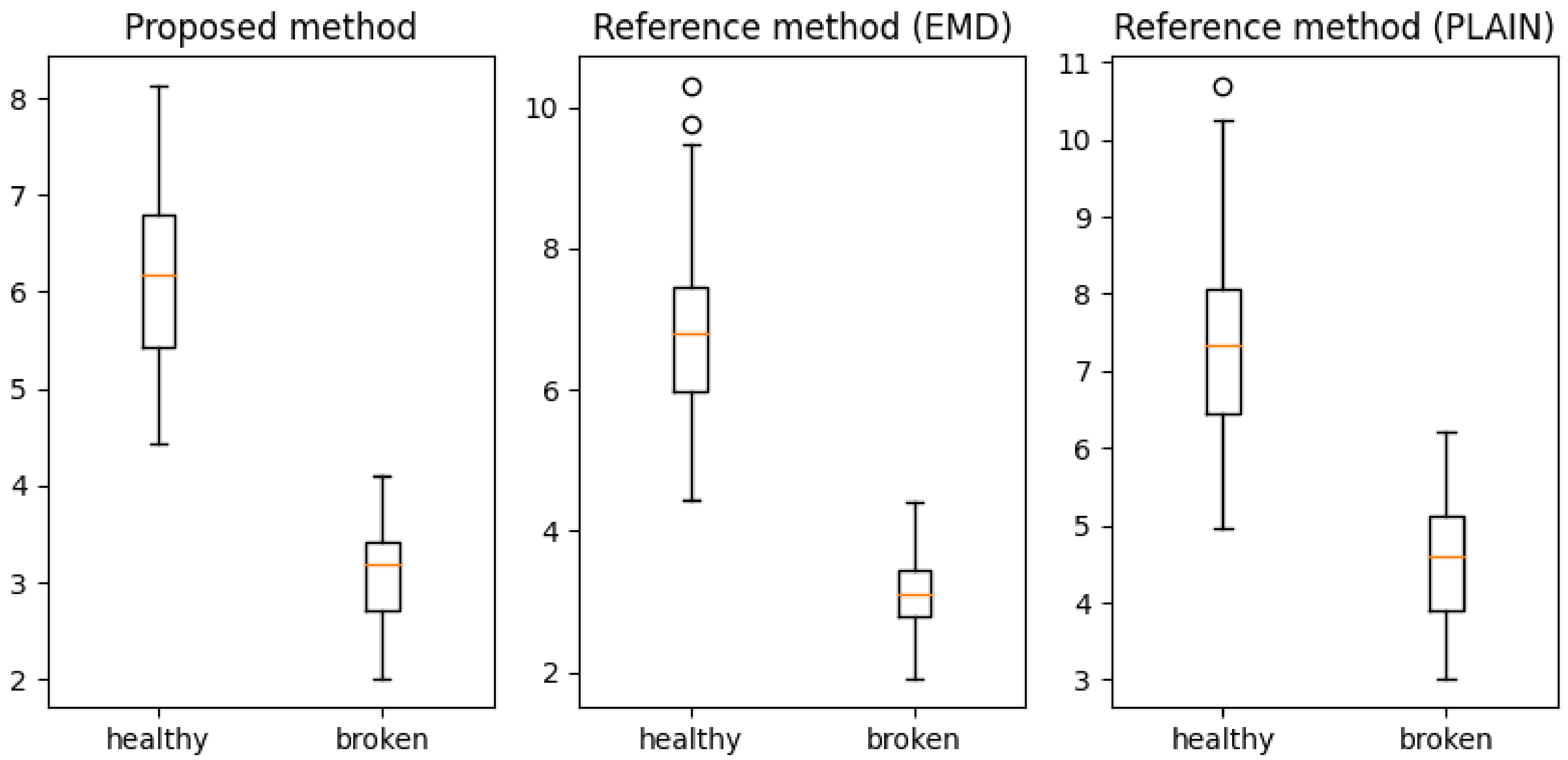
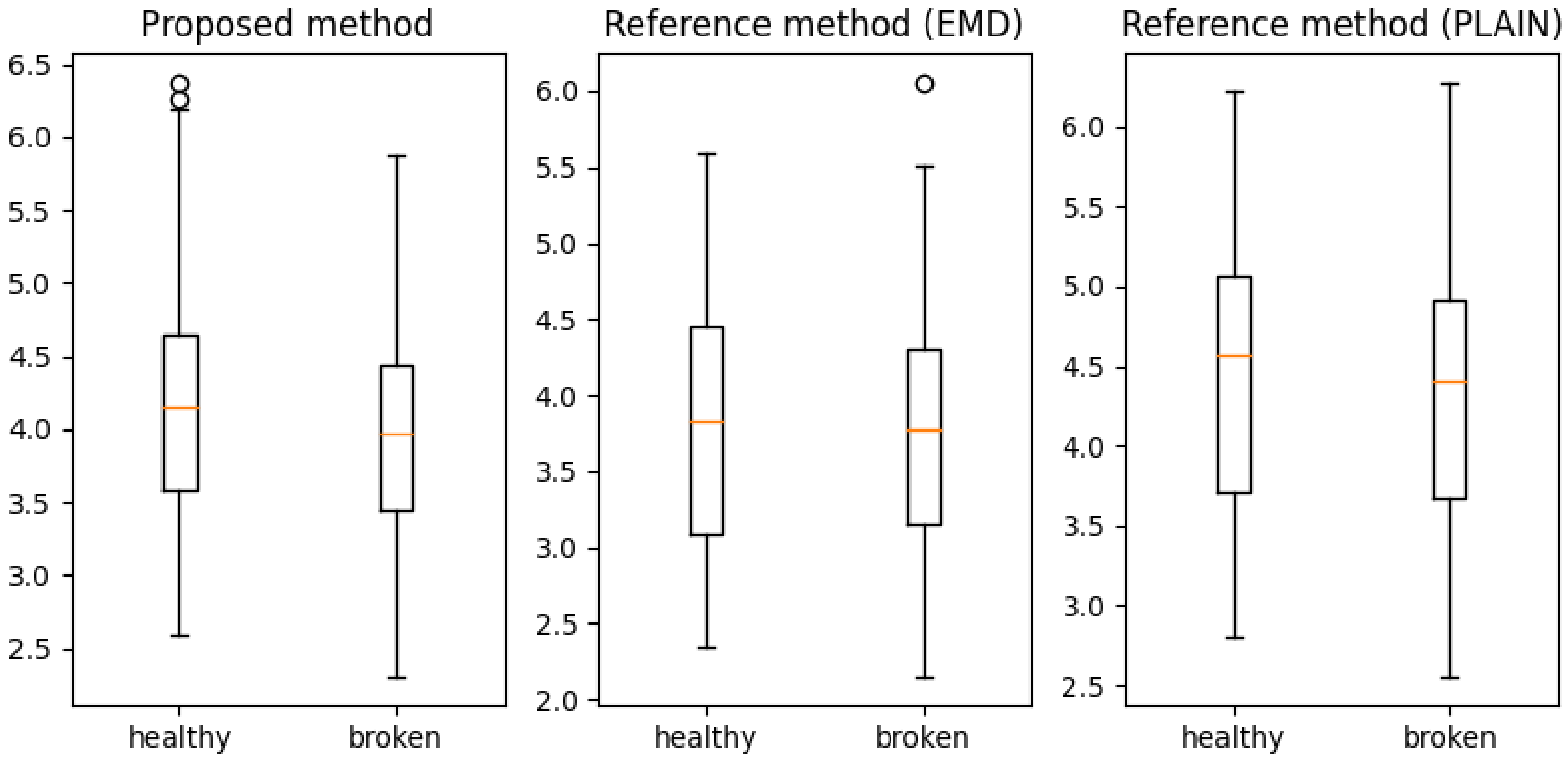
3. Results
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ASF | adaptive Schur filter |
| CNN | convolutional neural network |
| EMD | empirical mode decomposition |
| FrFT | Fractional Fourier Transform |
| FT | Fourier transform |
| HHT | Hilbert–Huang transform |
| IMF | intrinsic mode function |
| LMS | least mean squares |
| LSTM | long short-term memory |
| NLMS | Normalized least mean squares |
| SVM | support-vector machine |
References
- Bracewell, R.N.; Bracewell, R.N. The Fourier Transform and Its Applications; McGraw-Hill: New York, NY, USA, 1986; Volume 31999. [Google Scholar]
- Betta, G.; Liguori, C.; Paolillo, A.; Pietrosanto, A. A DSP-based FFT-analyzer for the fault diagnosis of rotating machine based on vibration analysis. IEEE Trans. Instrum. Meas. 2002, 51, 1316–1322. [Google Scholar] [CrossRef]
- Patil, S.; Gaikwad, J. Vibration analysis of electrical rotating machines using FFT: A method of predictive maintenance. In Proceedings of the IEEE 2013 Fourth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Tiruchengode, India, 4–6 July 2013; pp. 1–6. [Google Scholar]
- Wang, J.; Li, S.; Xin, Y.; An, Z. Gear fault intelligent diagnosis based on frequency-domain feature extraction. J. Vib. Eng. Technol. 2019, 7, 159–166. [Google Scholar] [CrossRef]
- Luo, J.; Yu, D.; Liang, M. Application of multi-scale chirplet path pursuit and fractional Fourier transform for gear fault detection in speed up and speed-down processes. J. Sound Vib. 2012, 331, 4971–4986. [Google Scholar] [CrossRef]
- Kar, C.; Mohanty, A. Vibration and current transient monitoring for gearbox fault detection using multiresolution Fourier transform. J. Sound Vib. 2008, 311, 109–132. [Google Scholar] [CrossRef]
- Vernekar, K.; Kumar, H.; Gangadharan, K. Gear fault detection using vibration analysis and continuous wavelet transform. Procedia Mater. Sci. 2014, 5, 1846–1852. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wong, A.K. Autoregressive model-based gear fault diagnosis. J. Vib. Acoust. 2002, 124, 172–179. [Google Scholar] [CrossRef]
- Yang, M.; Makis, V. ARX model-based gearbox fault detection and localization under varying load conditions. J. Sound Vib. 2010, 329, 5209–5221. [Google Scholar] [CrossRef]
- Heyns, T.; Heyns, P.S.; Zimroz, R. Combining discrepancy analysis with sensorless signal resampling for condition monitoring of rotating machines under fluctuating operations. In Proceedings of the 9th International Conference on Condition Monitoring and Machinery Failure Prevention Technologies 2012 (CM 2012 and MFPT 2012), London, UK, 12–14 June 2012; Volume 1, pp. 503–516. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Goncalves, P. On empirical mode decomposition and its algorithms. In Proceedings of the IEEE-EURASIP Workshop on Nonlinear Signal and Image Processing, Grado, Italy, 3–6 June 2003; Volume 3, pp. 8–11. [Google Scholar]
- Dybała, J.; Zimroz, R. Empirical mode decomposition of vibration signal for detection of local disturbances in planetary gearbox used in heavy machinery system. Key Eng. Mater. 2014, 588, 109–116. [Google Scholar] [CrossRef]
- Guo, T.; Deng, Z. An improved EMD method based on the multi-objective optimization and its application to fault feature extraction of rolling bearing. Appl. Acoust. 2017, 127, 46–62. [Google Scholar] [CrossRef]
- Liu, B.; Riemenschneider, S.; Xu, Y. Gearbox fault diagnosis using empirical mode decomposition and Hilbert spectrum. Mech. Syst. Signal Process. 2006, 20, 718–734. [Google Scholar] [CrossRef]
- Wang, Y.H.; Yeh, C.H.; Young, H.W.V.; Hu, K.; Lo, M.T. On the computational complexity of the empirical mode decomposition algorithm. Phys. A Stat. Mech. Appl. 2014, 400, 159–167. [Google Scholar] [CrossRef]
- Elasha, F.; Ruiz-Carcel, C.; Mba, D.; Chandra, P. A Comparative Study of the Effectiveness of Adaptive Filter Algorithms, Spectral Kurtosis and Linear Prediction in Detection of a Naturally Degraded Bearing in a Gearbox. J. Fail. Anal. Prev. 2014, 14, 623–636. [Google Scholar] [CrossRef]
- Chaturved, G.K.; Thomas, D.W. Adaptive noise cancelling and condition monitoring. J. Sound Vib. 1981, 76, 391–405. [Google Scholar] [CrossRef]
- Elasha, F.; Mba, D.; Ruiz-Carcel, C. A comparative study of adaptive filters in detecting a naturally degraded bearing within a gearbox. Case Stud. Mech. Syst. Signal Process. 2016, 3, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.K.; White, P.R. The enhancement of impulsive noise and vibration signals for fault detection in rotating and reciprocating machinery. J. Sound Vib. 1998, 217, 485–505. [Google Scholar] [CrossRef]
- Makowski, R.; Zimroz, R. Application of Schur Filtering for Local Damage Detection in Gearboxes. Cond. Monit. Mach. Non-Station. Oper. 2012, 301–308. [Google Scholar] [CrossRef]
- Makowski, R.A.; Zimroz, R. Adaptive bearings vibration modelling for diagnosis. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2011; Volume 6943, pp. 248–259. [Google Scholar] [CrossRef] [Green Version]
- Makowski, R.; Zimroz, R. A procedure for weighted summation of the derivatives of reflection coefficients in adaptive Schur filter with application to fault detection in rolling element bearings. Mech. Syst. Signal Process. 2013, 38, 65–77. [Google Scholar] [CrossRef]
- Makowski, R.; Zimroz, R. New techniques of local damage detection in machinery based on stochastic modelling using adaptive Schur filter. Appl. Acoust. 2014, 77, 130–137. [Google Scholar] [CrossRef]
- Yao, X.; Guo, C.; Zhong, M.; Li, Y.; Shan, G.; Zhang, Y. Wind turbine gearbox fault diagnosis using adaptive Morlet wavelet spectrum. In Proceedings of the 2009 2nd International Conference on Intelligent Computing Technology and Automation, ICICTA 2009, Changsha, China, 10–11 October 2009; Volume 2, pp. 580–583. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Prosvirin, A.; Kim, J.M. A Reliable Fault Diagnosis Method for a Gearbox System with Varying Rotational Speeds. Sensors 2020, 20, 3105. [Google Scholar] [CrossRef]
- Tian, S.; Qian, Z. Planetary gearbox fault feature enhancement based on combined adaptive filter method. Adv. Mech. Eng. 2015, 7, 168781401562032. [Google Scholar] [CrossRef] [Green Version]
- Kucharczyk, D.; Wyłomańska, A.; Zimroz, R. Structural break detection method based on the Adaptive Regression Splines technique. Phys. A Stat. Mech. Appl. 2017, 471, 499–511. [Google Scholar] [CrossRef] [Green Version]
- Vib, J.; Eng, T.; Elasha, F.; Li, X.; Mba, D.; Ogundare, A.; Ojolo, S. A Novel Condition Indicator for Bearing Fault Detection Within Helicopter Transmission. J. Vib. Eng. Technol. 2020. [Google Scholar] [CrossRef]
- Michalak, A.; Wodecki, J.; Wyłomańska, A.; Zimroz, R. Application of cointegration to vibration signal for local damage detection in gearboxes. Appl. Acoust. 2019, 144, 4–10. [Google Scholar] [CrossRef]
- Cui, L.; Zhang, Y.; Zhang, F.; Zhang, J.; Lee, S. Vibration response mechanism of faulty outer race rolling element bearings for quantitative analysis. J. Sound Vib. 2016, 364, 67–76. [Google Scholar] [CrossRef]
- Xueyi, L.; Jialin, L.; Yongzhi, Q.; David, H. Semi-supervised gear fault diagnosis using raw vibration signal based on deep learning. Chin. J. Aeronaut. 2020, 33, 418–426. [Google Scholar]
- Saufi, S.R.; Ahmad, Z.A.B.; Leong, M.S.; Lim, M.H. Gearbox fault diagnosis using a deep learning model with limited data sample. IEEE Trans. Ind. Inform. 2020, 16, 6263–6271. [Google Scholar] [CrossRef]
- Li, C.; Sanchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D.; Vásquez, R.E. Multimodal deep support vector classification with homologous features and its application to gearbox fault diagnosis. Neurocomputing 2015, 168, 119–127. [Google Scholar] [CrossRef]
- Sun, G.D.; Wang, Y.R.; Sun, C.F.; Jin, Q. Intelligent detection of a planetary gearbox composite fault based on adaptive separation and deep learning. Sensors 2019, 19, 5222. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Heydarzadeh, M.; Kia, S.H.; Nourani, M.; Henao, H.; Capolino, G.A. Gear fault diagnosis using discrete wavelet transform and deep neural networks. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 1494–1500. [Google Scholar]
- Chen, Z.; Li, C.; Sanchez, R.V. Gearbox fault identification and classification with convolutional neural networks. Shock Vib. 2015, 2015, 390134. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Zhang, S.; Yang, S.; Gui, G. Learning attention representation with a multi-scale CNN for gear fault diagnosis under different working conditions. Sensors 2020, 20, 1233. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Cheng, G.; Pang, Y.; Kuai, M. Planetary gear fault diagnosis via feature image extraction based on multi central frequencies and vibration signal frequency Spectrum. Sensors 2018, 18, 1735. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Sanchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D.; Vásquez, R.E. Gearbox fault diagnosis based on deep random forest fusion of acoustic and vibratory signals. Mech. Syst. Signal Process. 2016, 76, 283–293. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Ha, J.M.; Youn, B.D. A Health Data Map-Based Ensemble of Deep Domain Adaptation under Inhomogeneous Operating Conditions for Fault Diagnosis of a Planetary Gearbox. IEEE Access 2021, 9, 79118–79127. [Google Scholar] [CrossRef]
- Wang, H.; Xu, J.; Sun, C.; Yan, R.; Chen, X. Intelligent Fault Diagnosis for Planetary Gearbox Using Time-Frequency Representation and Deep Reinforcement Learning. IEEE/ASME Trans. Mechatron. 2021. [Google Scholar] [CrossRef]
- Shi, J.; Peng, D.; Peng, Z.; Zhang, Z.; Goebel, K.; Wu, D. Planetary gearbox fault diagnosis using bidirectional-convolutional LSTM networks. Mech. Syst. Signal Process. 2022, 162, 107996. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Li, X.; Lee, J. Cross-domain gearbox diagnostics under variable working conditions with deep convolutional transfer learning. J. Vib. Control 2021, 27, 854–864. [Google Scholar] [CrossRef]
- Ye, Z.; Yu, J. Deep morphological convolutional network for feature learning of vibration signals and its applications to gearbox fault diagnosis. Mech. Syst. Signal Process. 2021, 161, 107984. [Google Scholar] [CrossRef]
- Yu, J.; Zhou, X.; Lu, L.; Zhao, Z. Multiscale Dynamic Fusion Global Sparse Network for Gearbox Fault Diagnosis. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar]
- Ye, Z.; Yu, J. AKRNet: A novel convolutional neural network with attentive kernel residual learning for feature learning of gearbox vibration signals. Neurocomputing 2021, 447, 23–37. [Google Scholar] [CrossRef]
- Zhang, K.; Tang, B.; Deng, L.; Liu, X. A hybrid attention improved ResNet based fault diagnosis method of wind turbines gearbox. Measurement 2021, 179, 109491. [Google Scholar] [CrossRef]
- Zhao, M.; Kang, M.; Tang, B.; Pecht, M. Deep residual networks with dynamically weighted wavelet coefficients for fault diagnosis of planetary gearboxes. IEEE Trans. Ind. Electron. 2017, 65, 4290–4300. [Google Scholar] [CrossRef]
- Chen, S.N.; Liu, F.; Gao, C.X.; Li, J. Gearbox Fault Diagnosis Classification with Empirical Mode Decomposition Based on Improved Long Short-Term Memory. In Proceedings of the 2021 IEEE 6th International Conference on Cloud Computing and Big Data Analytics (ICCCBDA), Chengdu, China, 24–26 April 2021; pp. 568–575. [Google Scholar]
- Wang, Y.; Sun, T.; Liu, Y. Gearbox Fault Diagnosis Based on Two-Class NMF Network Under Variable Working Conditions. J. Electr. Eng. Technol. 2021, 1–12. [Google Scholar] [CrossRef]
- Xiao, D.; Ding, J.; Li, X.; Huang, L. Gear fault diagnosis based on kurtosis criterion VMD and SOM neural network. Appl. Sci. 2019, 9, 5424. [Google Scholar] [CrossRef] [Green Version]
- Aherwar, A.; Khalid, M.S. Vibration analysis techniques for gearbox diagnostic: A review. Int. J. Adv. Eng. Technol. 2012, 3, 4–12. [Google Scholar]
- Sharma, V.; Parey, A. A review of gear fault diagnosis using various condition indicators. Procedia Eng. 2016, 144, 253–263. [Google Scholar] [CrossRef] [Green Version]
- Basangar, S.; Tripathi, B. Literature review on fault detection of equipment using machine learning techniques. In Proceedings of the IEEE 2020 International Conference on Computation, Automation and Knowledge Management (ICCAKM), Dubai, United Arab Emirates, 9–10 January 2020; pp. 62–67. [Google Scholar]
- Malik, H.; Pandya, Y.; Parashar, A.; Sharma, R. Feature extraction using EMD and classifier through artificial neural networks for gearbox fault diagnosis. In Applications of Artificial Intelligence Techniques in Engineering; Springer: Berlin/Heidelberg, Germany, 2019; pp. 309–317. [Google Scholar]
- Haykin, S.S. Adaptive Filter Theory; Pearson Education India: Delhi, India, 2005. [Google Scholar]
- Huang, N.E. Hilbert-Huang Transform and Its Applications; World Scientific: Singapore, 2014; Volume 16. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Patle, A.; Chouhan, D.S. SVM kernel functions for classification. In Proceedings of the IEEE 2013 International Conference on Advances in Technology and Engineering (ICATE), Mumbai, India, 23–25 January 2013; pp. 1–9. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors (SVM Inputs) | Classification Accuracy [%] | ||
|---|---|---|---|
| Proposed Method (NLMS Error) | Reference Method (EMD—IMF 1) | Reference Method (PLAIN) | |
| 1, 2, 3, 4 | 100.0 | 100.0 | 100.0 |
| 2, 3, 4 | 93.58 | 71.534 | 72.727 |
| 3, 4 | 71.875 | 58.58 | 71.875 |
| 4 | 55.114 | 50.852 | 52.33 |
| 3 | 65.398 | 52.67 | 58.92 |
| 2 | 81.818 | 71.25 | 54.886 |
| 1 | 100.0 | 99.886 | 94.886 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vrba, J.; Cejnek, M.; Steinbach, J.; Krbcova, Z. A Machine Learning Approach for Gearbox System Fault Diagnosis. Entropy 2021, 23, 1130. https://doi.org/10.3390/e23091130
Vrba J, Cejnek M, Steinbach J, Krbcova Z. A Machine Learning Approach for Gearbox System Fault Diagnosis. Entropy. 2021; 23(9):1130. https://doi.org/10.3390/e23091130
Chicago/Turabian StyleVrba, Jan, Matous Cejnek, Jakub Steinbach, and Zuzana Krbcova. 2021. "A Machine Learning Approach for Gearbox System Fault Diagnosis" Entropy 23, no. 9: 1130. https://doi.org/10.3390/e23091130