
Subway Gearbox Fault Diagnosis Algorithm Based on Adaptive Spline Impact Suppression


Abstract
:1. Introduction
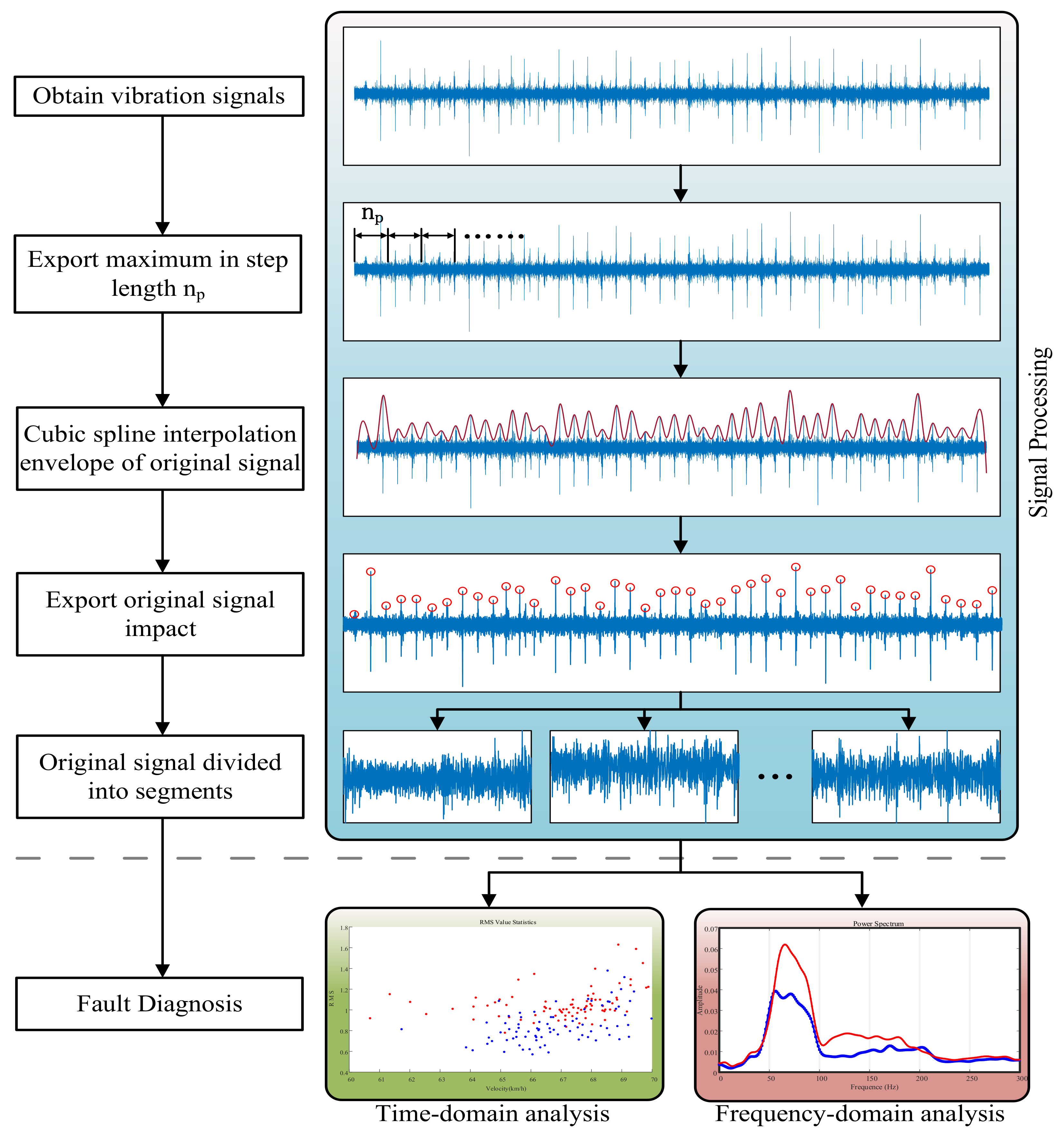
2. Signal Segmentation Method Based on Cubic Spline Interpolation Envelope
2.1. Cubic Spline Interpolation Envelope
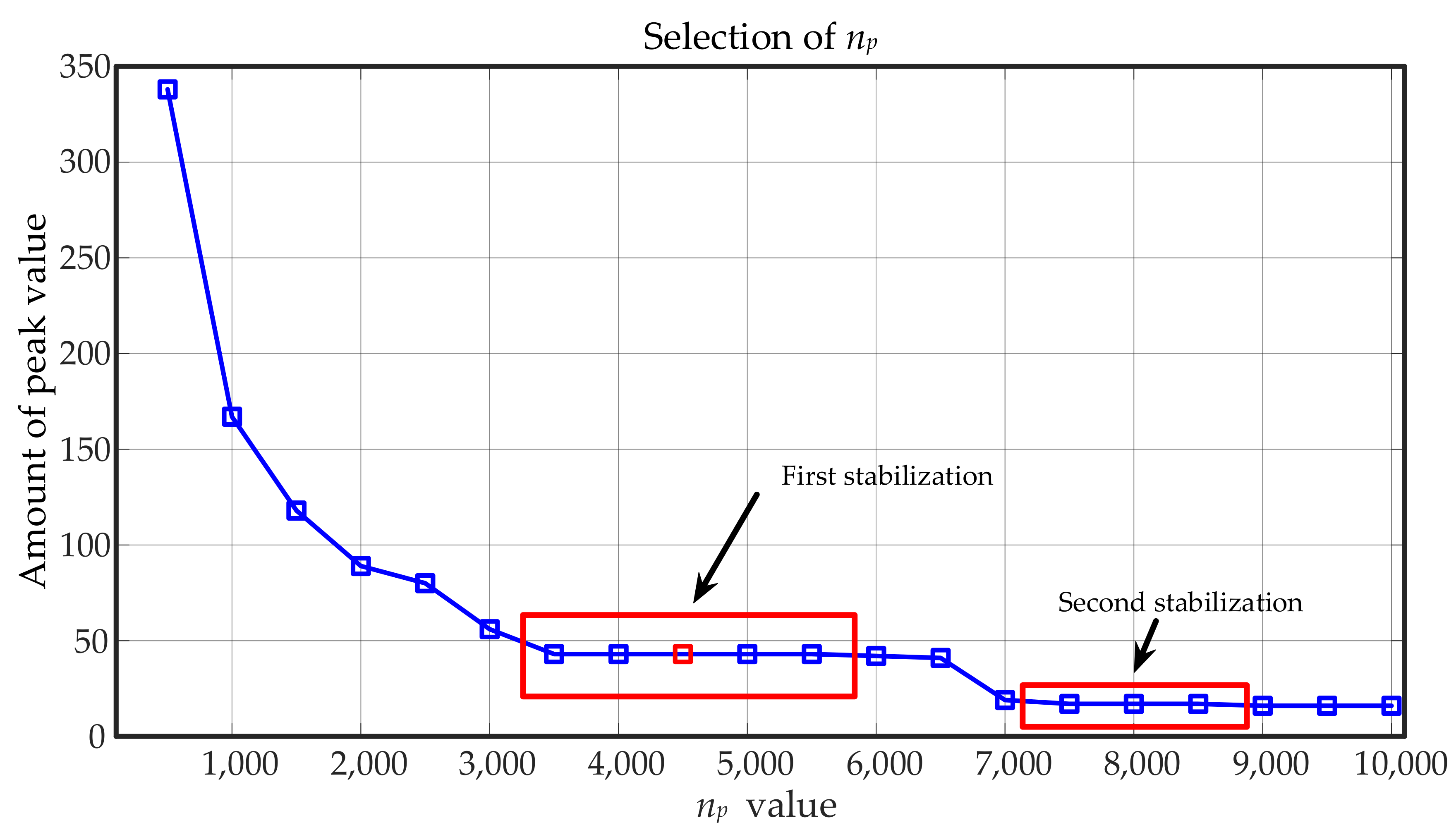
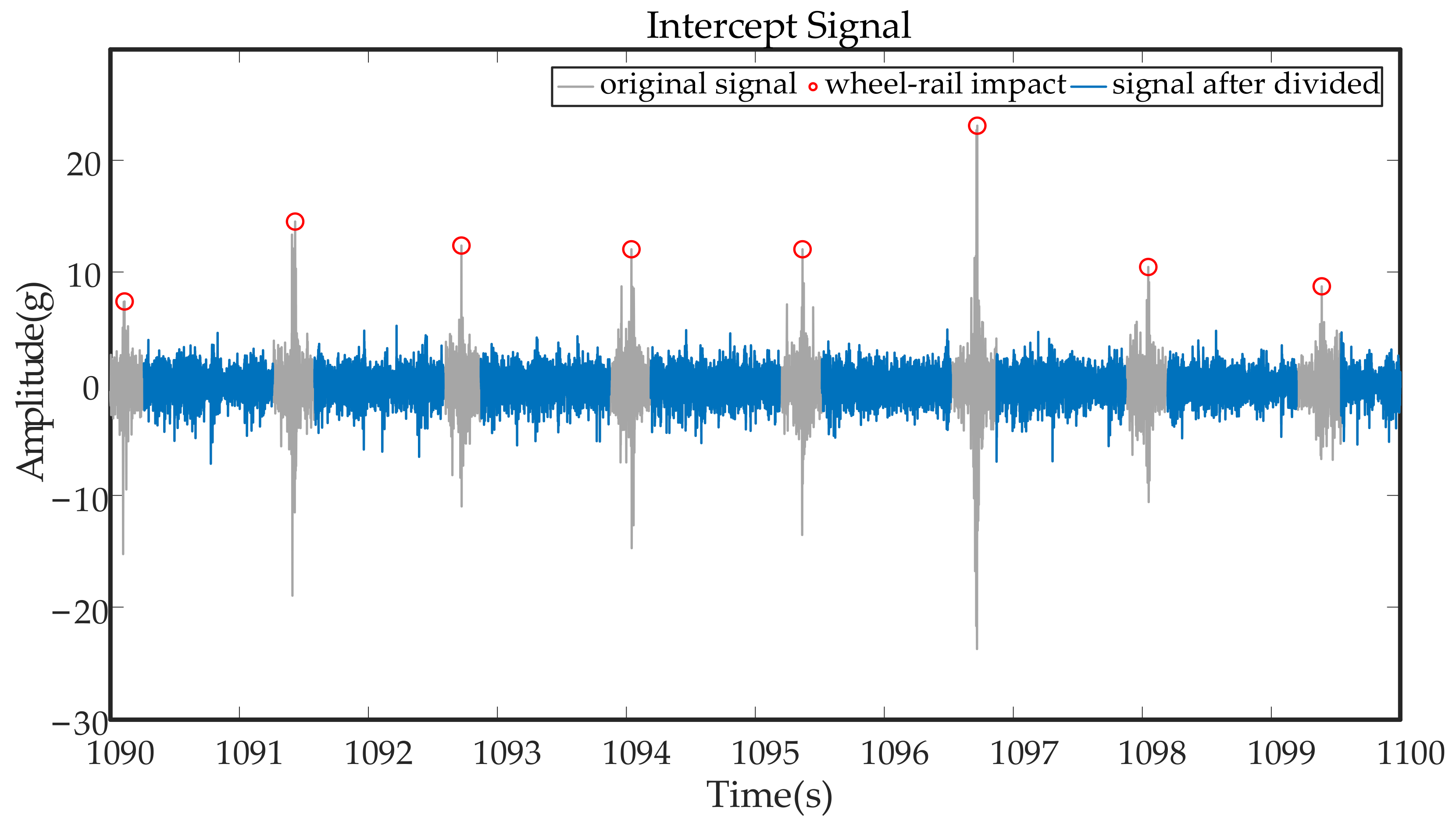
2.2. Impact Component Extraction and Short-Term Signal Sample Segmentation
3. Experiment and Results
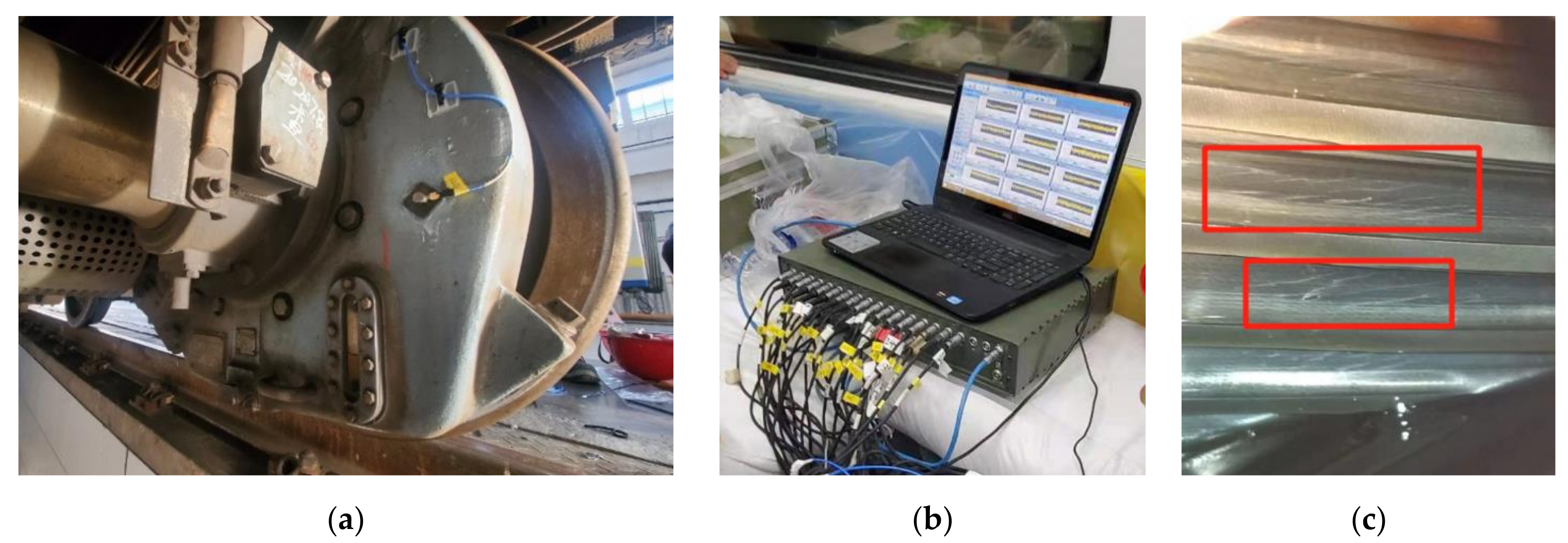
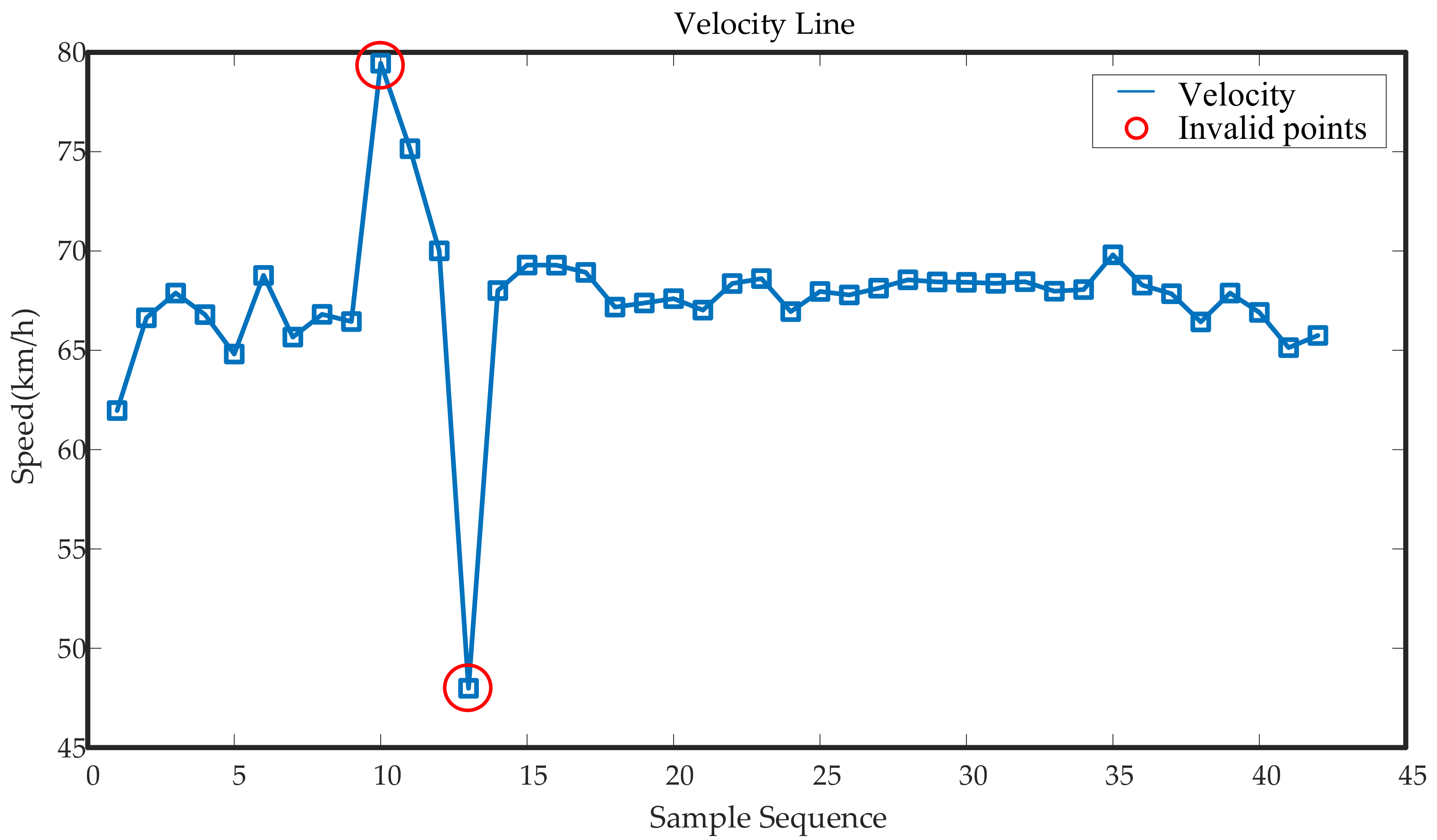
3.1. Real Vehicle Data Collection
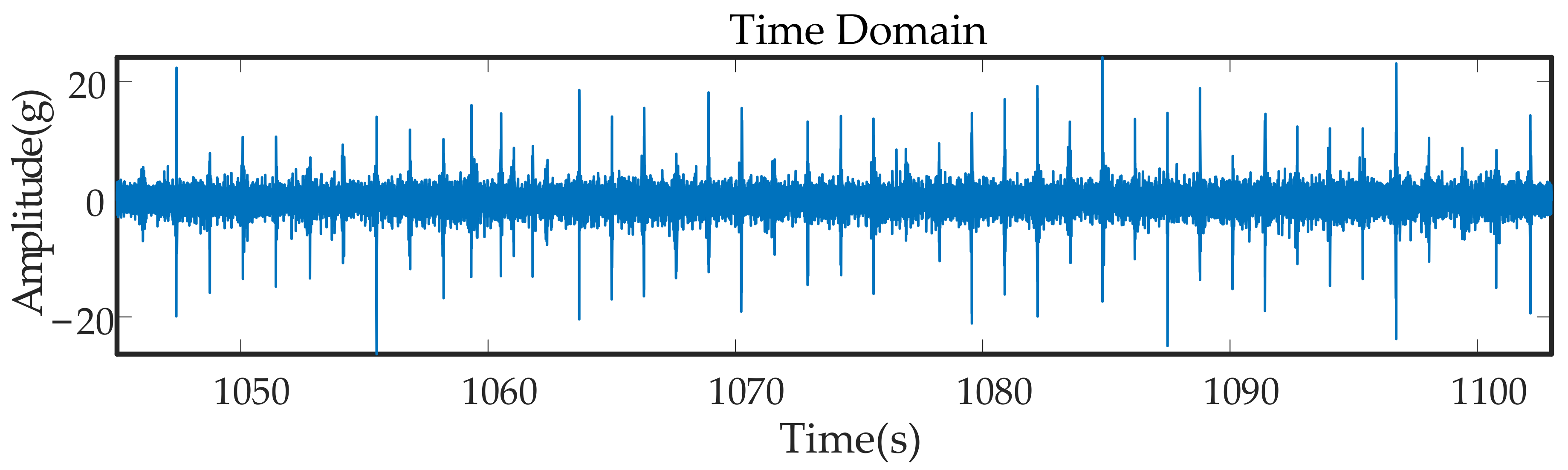
3.2. Results
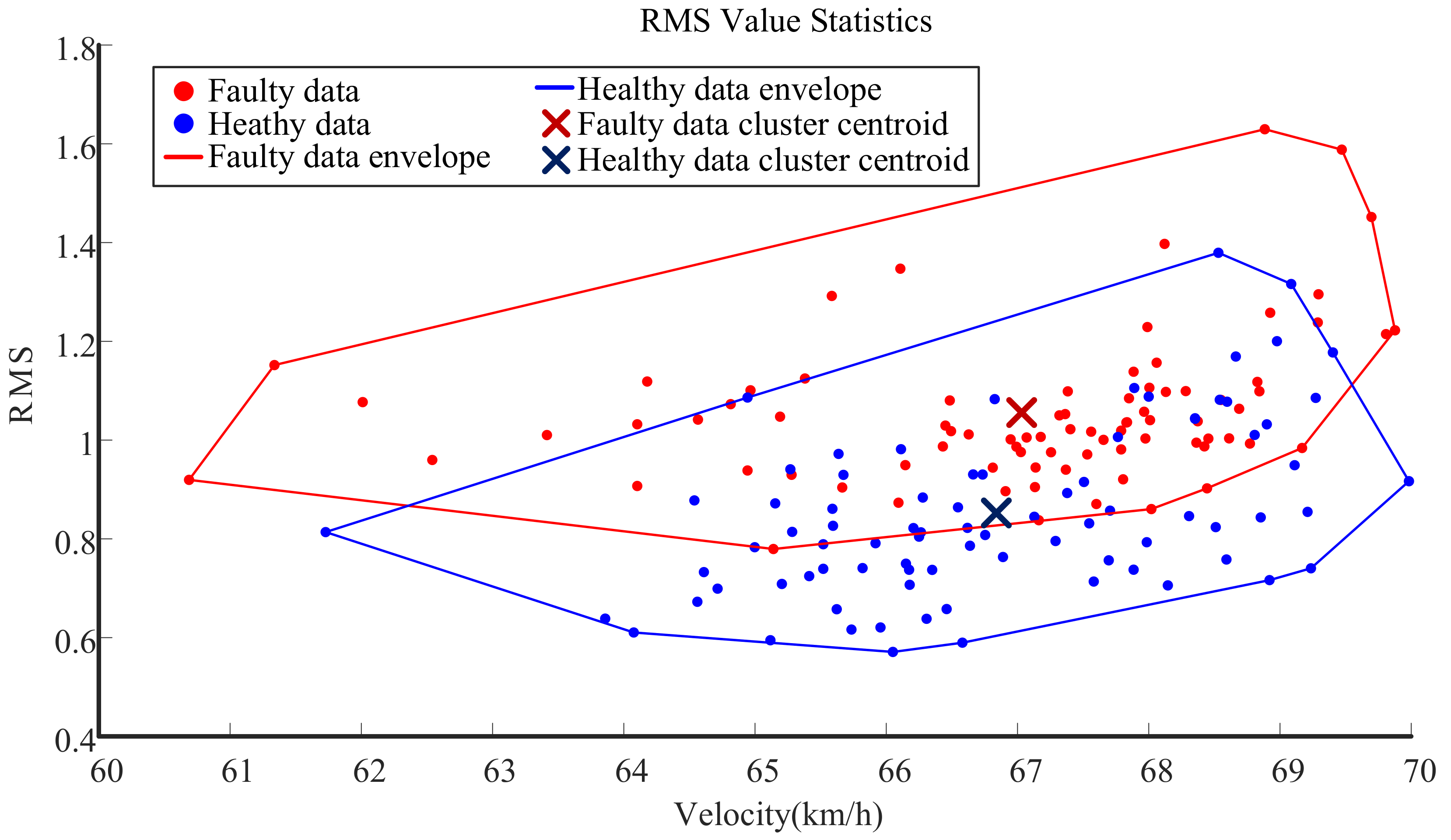
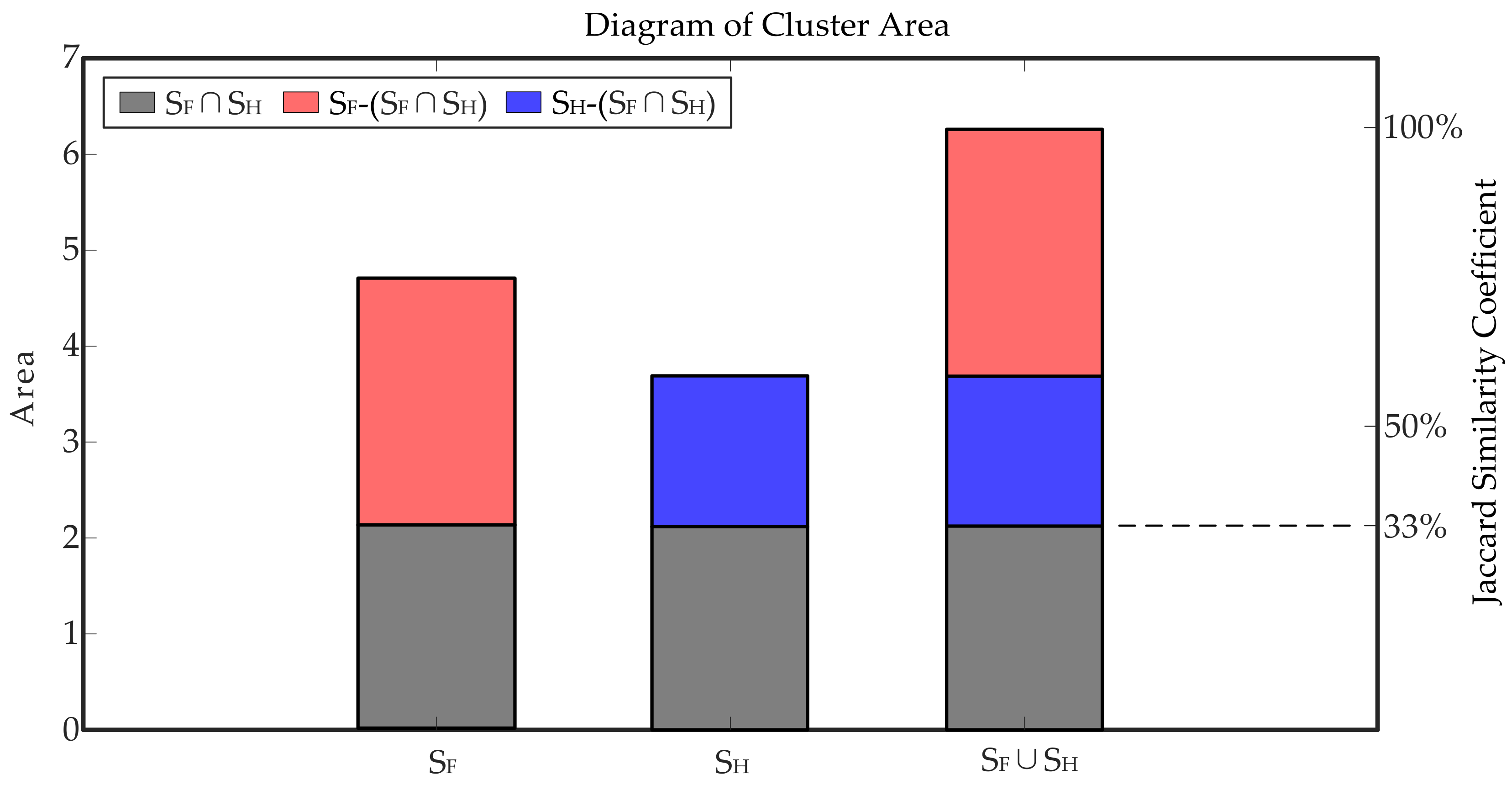
3.3. Statistical Analysis of Time-Domain Root Mean Square Values
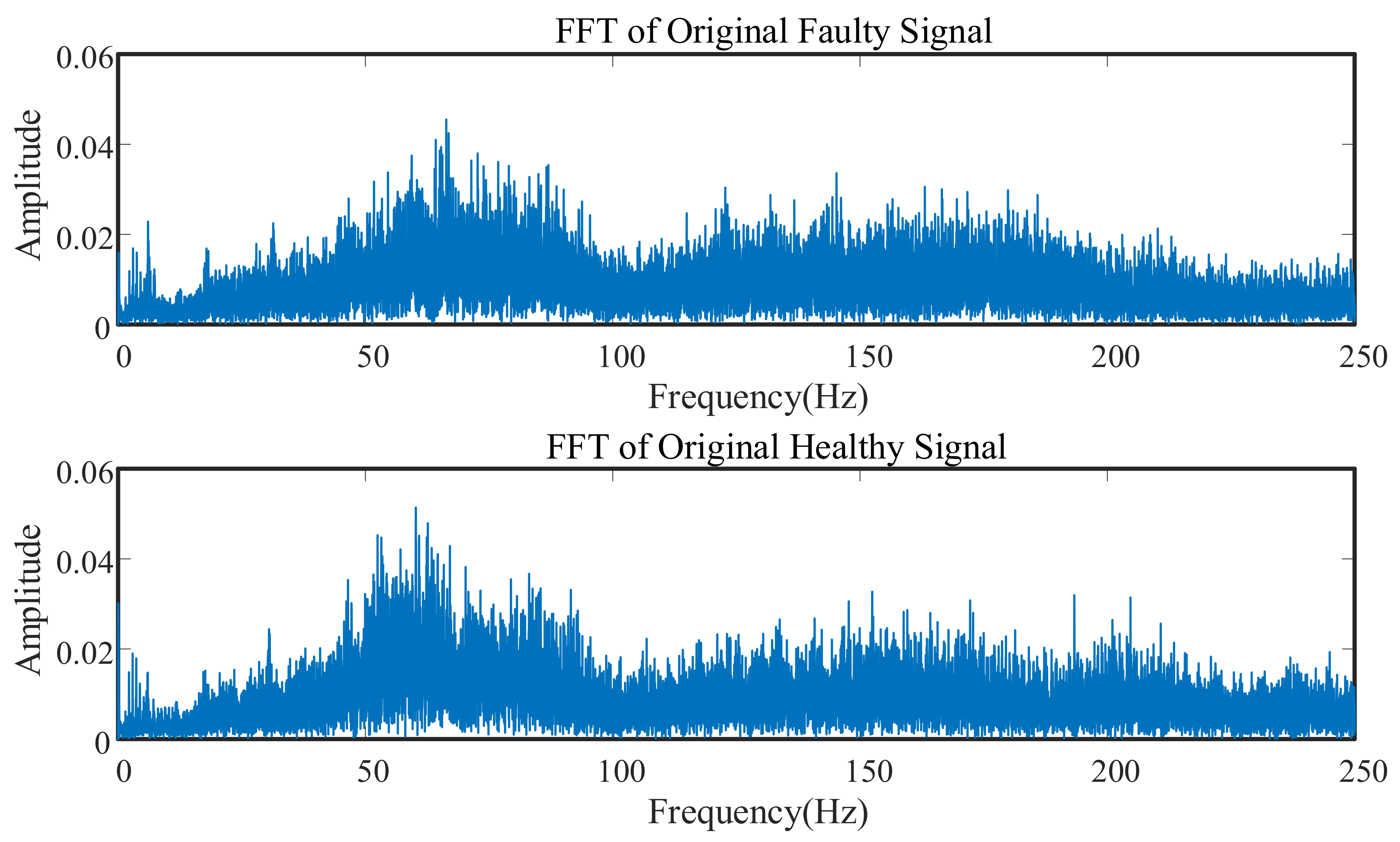
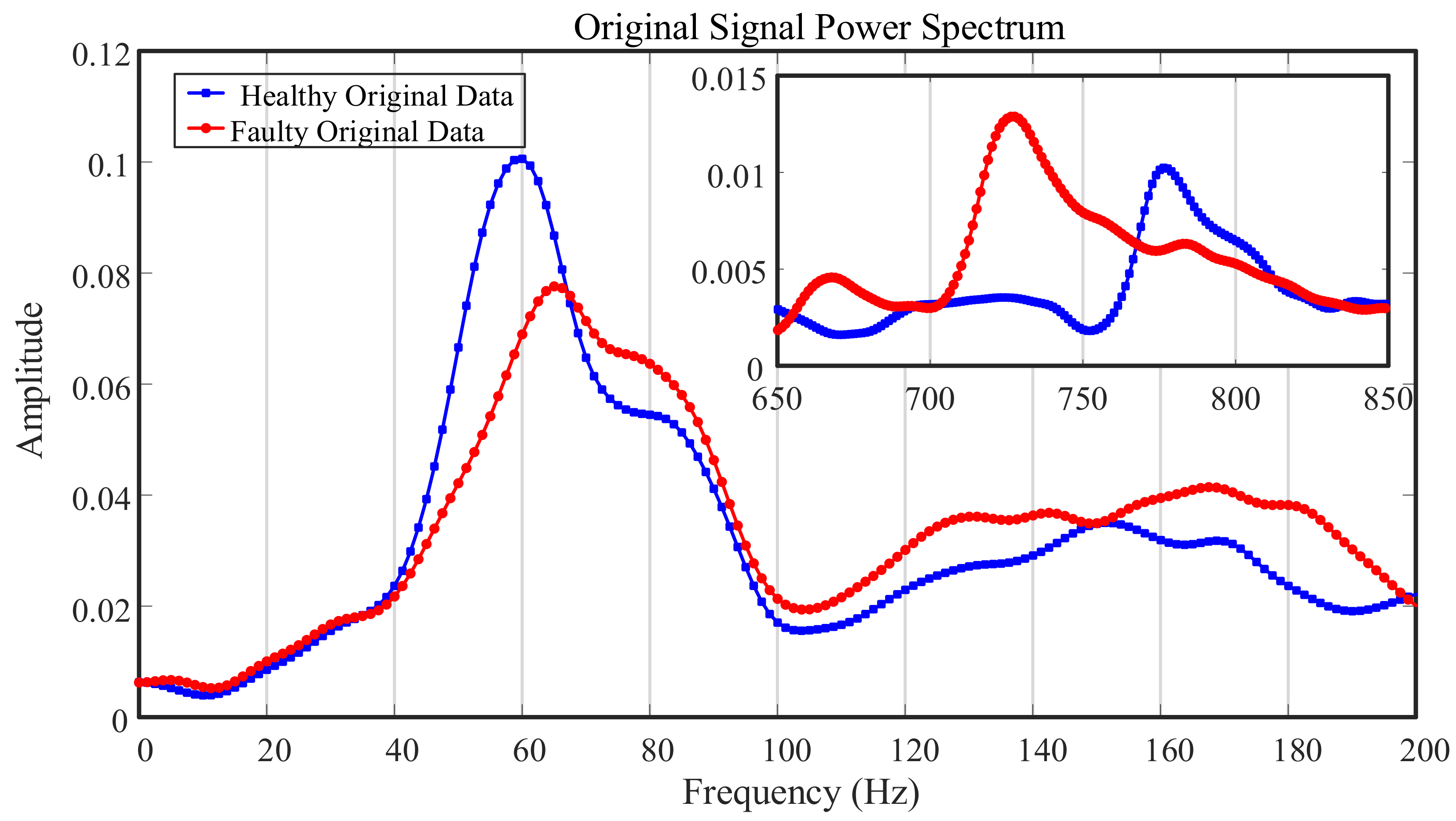
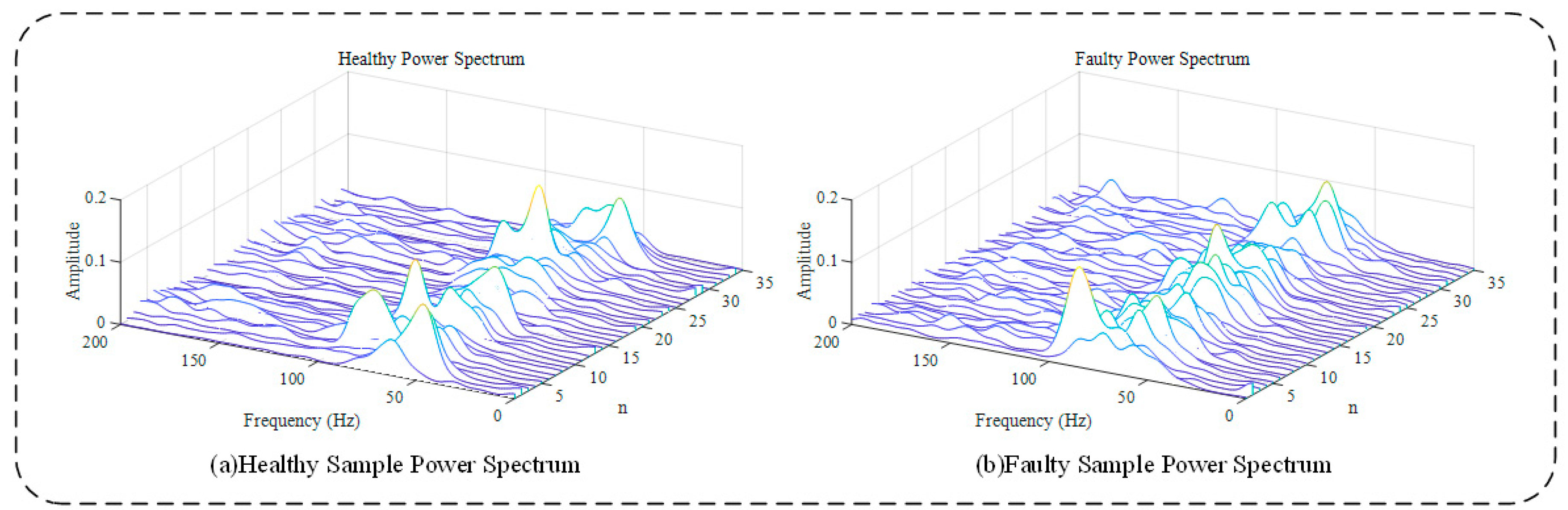
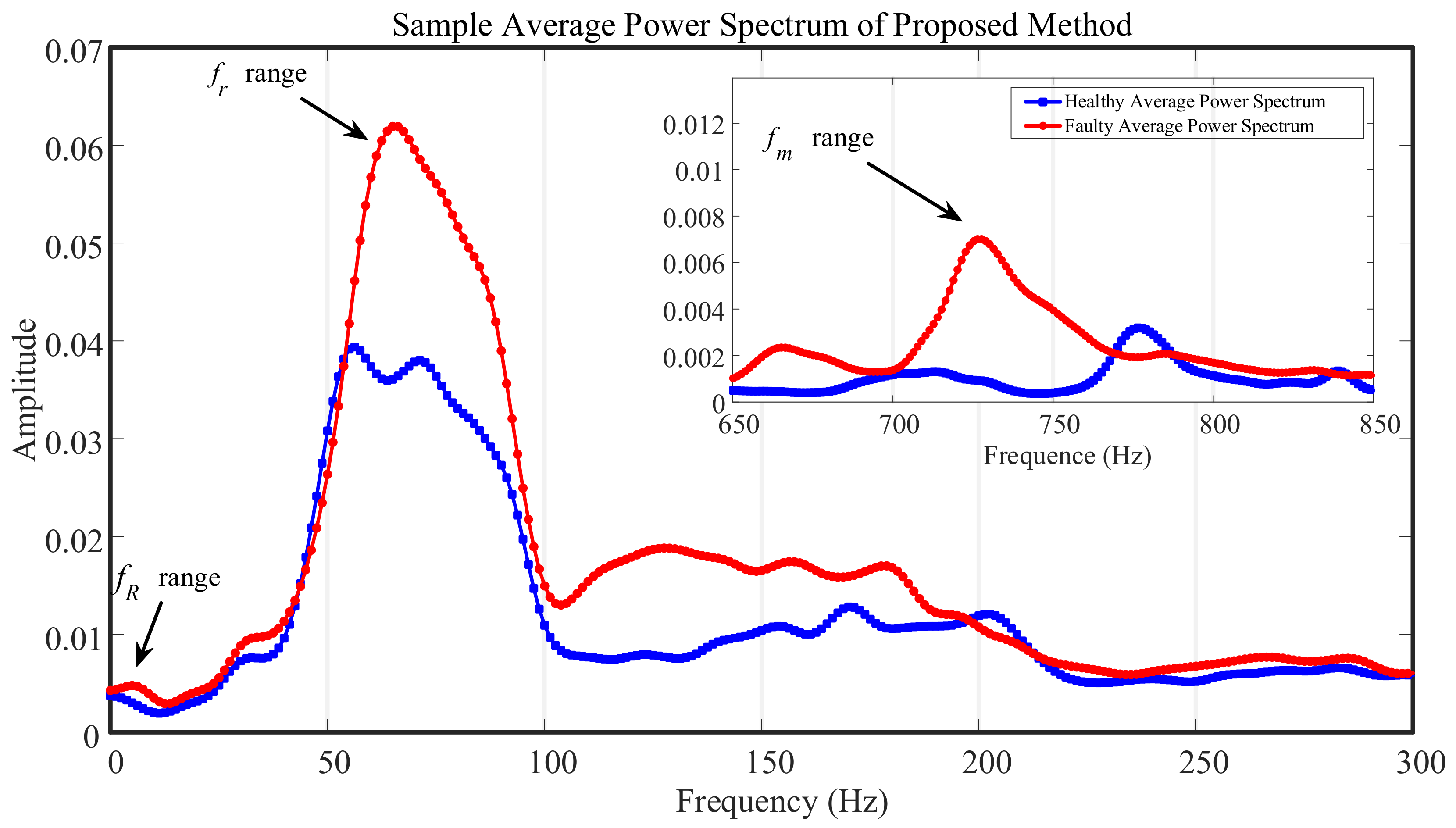
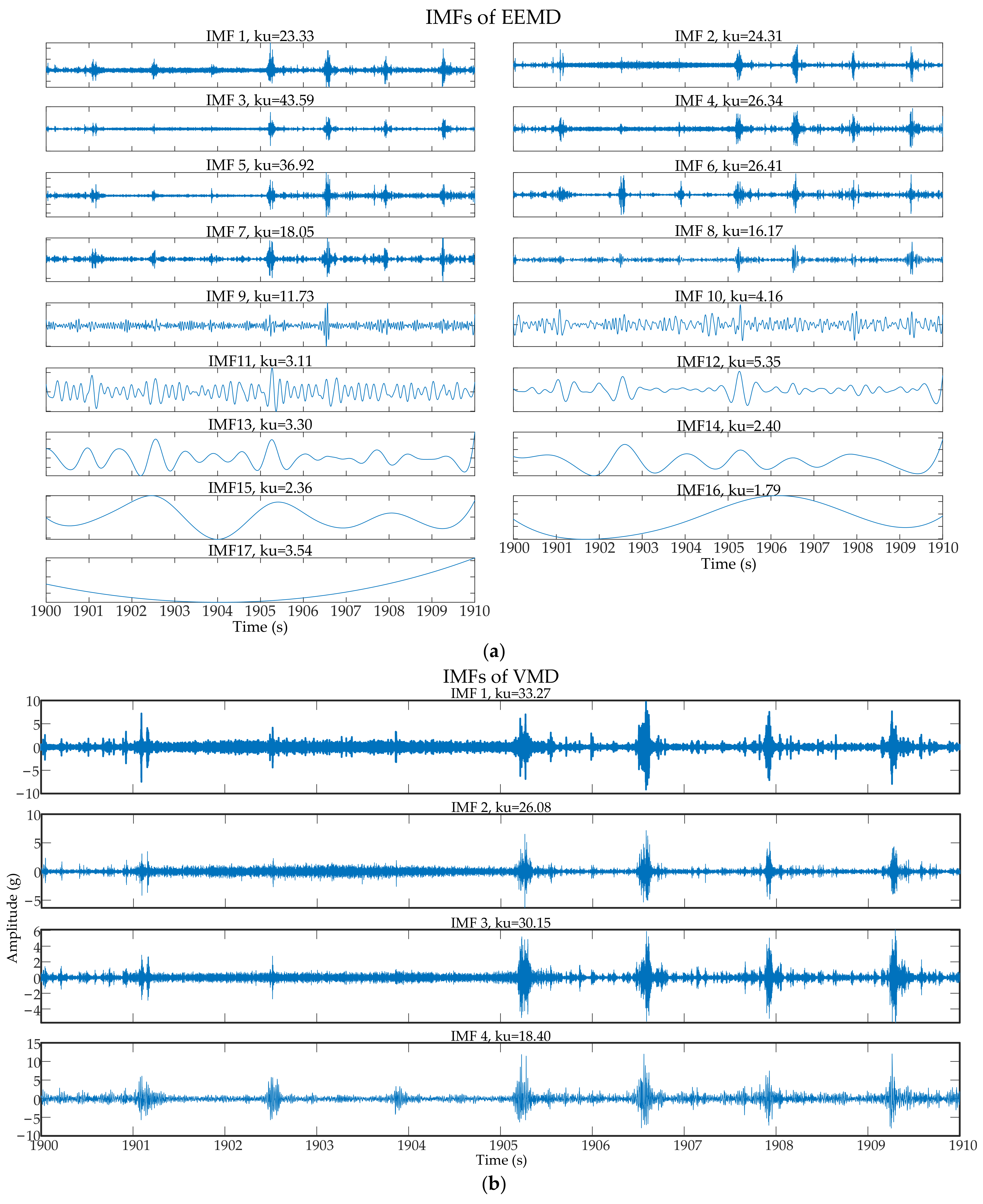
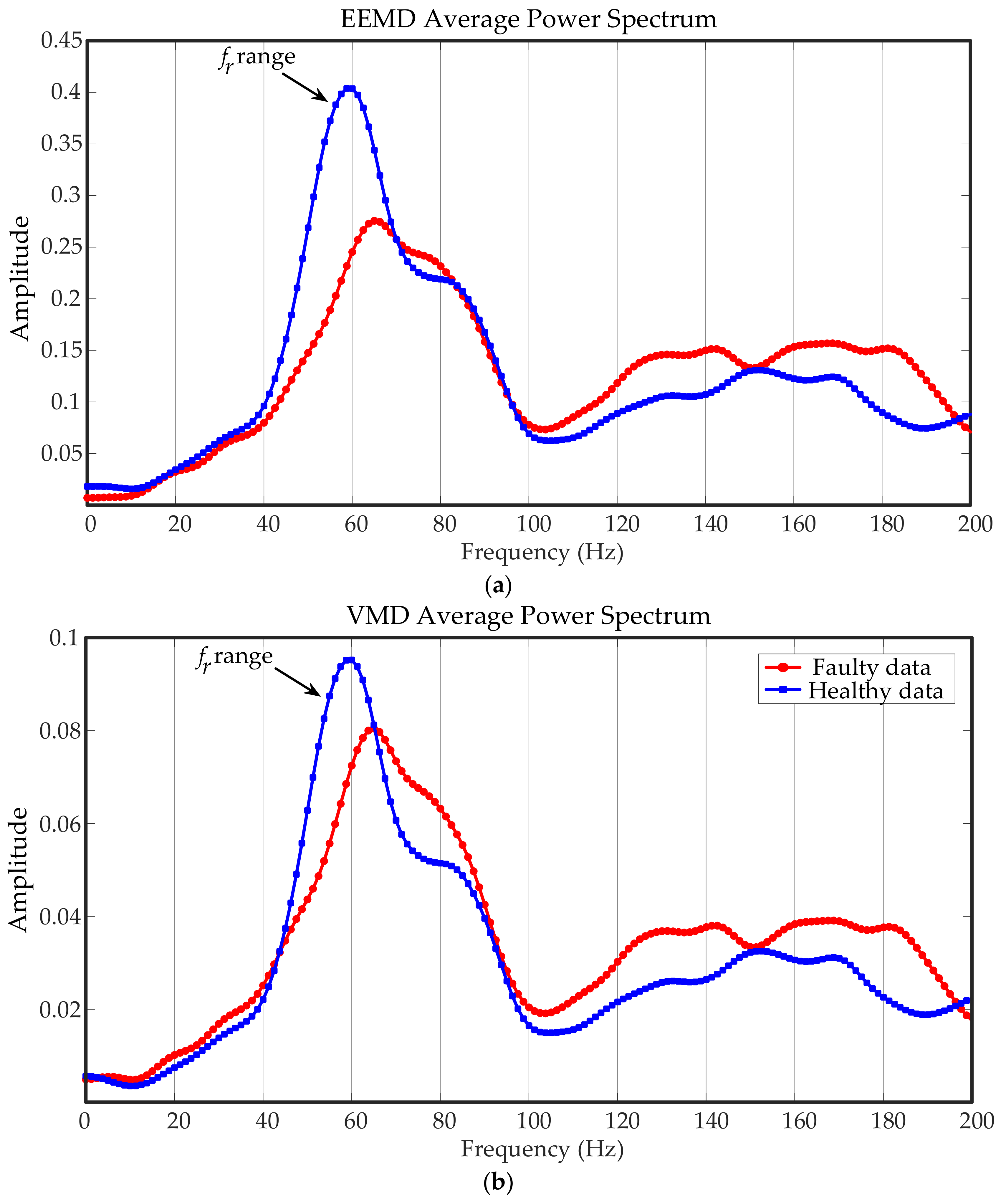
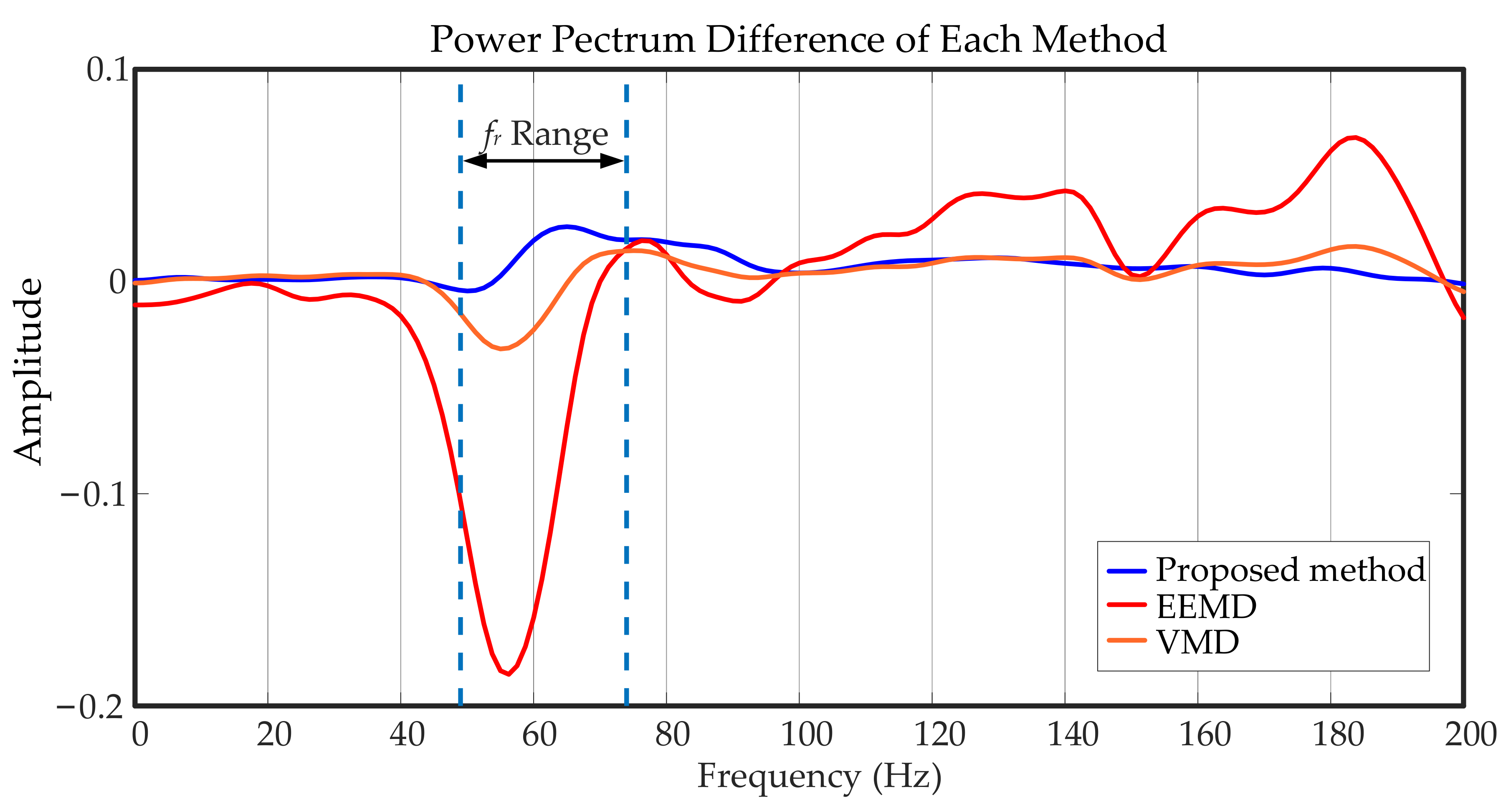
3.4. Multiple Mean Power Spectrum Analysis in Frequency Domain
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, J.; Bai, Y.; Wang, J.; Zhao, Y. Tri-axial vibration information fusion model and its application to gear fault diagnosis in variable working conditions. Meas. Sci. Technol. 2019, 30, 095009. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.; Huang, B. Data-driven fault diagnosis for traction systems in high-speed trains: A survey, challenges, and perspectives. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, J. A comprehensive fault diagnosis method for rolling bearings based on refined composite multiscale dispersion entropy and fast ensemble empirical mode decomposition. Entropy 2019, 21, 680. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2011, 1, 1–41. [Google Scholar] [CrossRef]
- Sadegh, H.M.; Esmaeilzadeh, K.S.; Saleh, S.M. Quantitative diagnosis for bearing faults by improving ensemble empirical mode decomposition. ISA Trans. 2018, 83, 261–275. [Google Scholar]
- Hou, J.; Wu, Y.; Gong, H.; Ahmad, A.S.; Liu, L. A novel intelligent method for bearing fault diagnosis based on eemd permutation entropy and gg clustering. Appl. Sci. 2020, 83, 386. [Google Scholar] [CrossRef] [Green Version]
- Ge, J.; Niu, T.; Xu, D.; Yin, G.; Wang, Y. A rolling bearing fault diagnosis method based on eemd-wsst signal reconstruction and multi-scale entropy. Entropy 2020, 22, 290. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prosvirin, A.E.; Islam, M.; Kim, J.M. An improved algorithm for selecting imf components in ensemble empirical mode decomposition for domain of rub-impact fault diagnosis. IEEE Access 2019, 7, 121728–121741. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Cheng, J.S.; Yu, Y.; Thai, V.T. An architecture of deep learning network based on ensemble empirical mode decomposition in precise identification of bearing vibration signal. J. Mech. Sci. Technol. 2019, 33, 41–50. [Google Scholar] [CrossRef]
- Wu, E.Q.; Wang, J.; Peng, X.Y.; Zhang, P.; Law, R.; Chen, X. Fault diagnosis of rotating machinery using gaussian process and eemd-treelet. Int. J. Adapt. Control Signal Process. 2019, 33, 52–73. [Google Scholar] [CrossRef] [Green Version]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Wang, L.; Shao, Y. Fault feature extraction of rotating machinery using a reweighted complete ensemble empirical mode decomposition with adaptive noise and demodulation analysis. Mech. Syst. Signal Process. 2020, 138, 106545.1–106545.20. [Google Scholar] [CrossRef]
- Kou, Z.; Yang, F.; Wu, J.; Li, T. Application of iceemdan energy entropy and afsa-svm for fault diagnosis of hoist sheave bearing. Entropy 2020, 22, 1347. [Google Scholar] [CrossRef] [PubMed]
- Han, T.; Liu, Q.; Zhang, L.; Tan, A. Fault feature extraction of low speed roller bearing based on teager energy operator and ceemd. Measurement 2019, 138, 400–408. [Google Scholar] [CrossRef]
- Li, R.; Ran, C.; Zhang, B.; Han, L.; Feng, S. Rolling bearings fault diagnosis based on improved complete ensemble empirical mode decomposition with adaptive noise, nonlinear entropy, and ensemble svm. Appl. Sci. 2020, 10, 5542. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Li, J.; Yao, X.; Wang, H.; Zhang, J. Periodic impulses extraction based on improved adaptive vmd and sparse code shrinkage denoising and its application in rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2019, 126, 568–589. [Google Scholar] [CrossRef]
- Zhang, C.; Yao, W.; Deng, W. Fault diagnosis for rolling bearings using optimized variational mode decomposition and resonance demodulation. Entropy 2020, 22, 739. [Google Scholar] [CrossRef]
- Zhou, X.; Li, Y.; Jiang, L.; Zhou, L. Fault feature extraction for rolling bearings based on parameter-adaptive variational mode decomposition and multi-point optimal minimum entropy deconvolution—Sciencedirect. Measurement 2020, 173, 108469. [Google Scholar] [CrossRef]
- Li, F.; Li, R.; Tian, L.; Chen, L.; Liu, J. Data-driven time-frequency analysis method based on variational mode decomposition and its application to gear fault diagnosis in variable working conditions—Sciencedirect. Mech. Syst. Signal Process. 2019, 116, 462–479. [Google Scholar] [CrossRef]
- Gu, R.; Chen, J.; Hong, R.; Wang, H.; Wu, W. Incipient fault diagnosis of rolling bearings based on adaptive variational mode decomposition and teager energy operator. Measurement 2020, 149, 106941. [Google Scholar] [CrossRef]
- Cai, W.; Yang, Z.; Wang, Z.; Wang, Y. A new compound fault feature extraction method based on multipoint kurtosis and variational mode decomposition. Entropy 2018, 20, 521. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. Application of optimized variational mode decomposition based on kurtosis and resonance frequency in bearing fault feature extraction. Trans. Inst. Meas. Control 2019, 42, 518–527. [Google Scholar] [CrossRef]
- Liu, H.; Xiang, J. Autoregressive model-enhanced variational mode decomposition for mechanical fault detection. Sci. Meas. Technol. 2019, 13, 843–851. [Google Scholar] [CrossRef]
- Miao, Y.; Zhao, M.; Lin, J. Identification of mechanical compound-fault based on the improved parameter-adaptive variational mode decomposition. ISA Trans. 2018, 84, 82–95. [Google Scholar] [CrossRef] [PubMed]
- Liang, T.; Lu, H. A novel method based on multi-island genetic algorithm improved variational mode decomposition and multi-features for fault diagnosis of rolling bearing. Entropy 2020, 22, 995. [Google Scholar] [CrossRef] [PubMed]
- Cheng, C.; Wang, J.; Chen, H.; Chen, Z.; Xie, P. A review of intelligent fault diagnosis for high-speed trains: Qualitative approaches. Entropy 2020, 23, 1. [Google Scholar] [CrossRef] [PubMed]
- Yao, D.; Li, B.; Liu, H.; Yang, J.; Jia, L. Remaining useful life prediction of roller bearings based on improved 1D-CNN and simple recurrent unit. Measurement 2021, 175, 109166. [Google Scholar] [CrossRef]
- Yao, D.; Liu, H.; Yang, J.; Zhang, J. Implementation of a novel algorithm of wheelset and axle box concurrent fault identification based on an efficient neural network with the attention mechanism. J. Intell. Manuf. 2020. [Google Scholar] [CrossRef]
- Liu, H.; Yao, D.; Yang, J.; Li, X. Lightweight Convolutional Neural Network and Its Application in Rolling Bearing Fault Diagnosis under Variable Working Conditions. Sensors 2019, 19, 4827. [Google Scholar] [CrossRef] [Green Version]
- Dibaj, A.; Ettefagh, M.M.; Hassannejad, R.; Ehghaghi, M.B. A hybrid fine-tuned vmd and cnn scheme for untrained compound fault diagnosis of rotating machinery with unequal-severity faults. Expert Syst. Appl. 2020, 167, 114094. [Google Scholar] [CrossRef]
- Lu, S.; Sian, H.; Wang, M.; Kuo, C. Fault diagnosis of power capacitors using a convolutional neural network combined with the chaotic synchronisation method and the empirical mode decomposition method. IET Sci. Meas. Technol. 2021. [Google Scholar] [CrossRef]
- Rui, Z.; Yan, R.; Chen, Z.; Mao, K.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar]
- Wen, L.; Gao, L.; Li, X.Y. A new deep transfer learning based on sparse auto-encoder for fault diagnosis. IEEE Trans. Syst. ManCybern. Syst. 2017, 49, 136–144. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Z.; Miao, Q.; Zhang, X. Complete ensemble local mean decomposition with adaptive noise and its application to fault diagnosis for rolling bearings. Mech. Syst. Signal Process. 2018, 106, 24–39. [Google Scholar] [CrossRef]
- Deng, W.; Yao, R.; Zhao, H.; Yang, X.; Li, G. A novel intelligent diagnosis method using optimal ls-svm with improved pso algorithm. Soft Comput. 2017, 23, 2445–2462. [Google Scholar] [CrossRef]
- Li, Y.; Si, S.; Liu, Z.; Liang, X. Review of local mean decomposition and its application in fault diagnosis of rotating machinery. J. Syst. Eng. Electron. 2019, 30, 799–814. [Google Scholar]
- Duan, Y.; Wang, C.; Chen, Y.; Liu, P. Improving the accuracy of fault frequency by means of local mean decomposition and ratio correction method for rolling bearing failure. Appl. Sci. 2019, 9, 1888. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Yang, J.; Bai, Y.; Zhao, Y.; Yao, D. A comparative study of the vibration characteristics of railway vehicle axlebox bearings with inner/outer race faults. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020. [Google Scholar] [CrossRef]
- Deng, M.; Deng, A.; Zhu, J.; Zhai, Y.; Liu, Y. Bandwidth fourier decomposition and its application in incipient fault identification of rolling bearings. Meas. Sci. Technol. 2019, 31, 015012. [Google Scholar] [CrossRef]
- Lei, W.; Liu, Z.; Qiang, M.; Xin, Z. Time–frequency analysis based on ensemble local mean decomposition and fast kurtogram for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2018, 103, 60–75. [Google Scholar] [CrossRef]
- Dou, C.; Lin, J. Extraction of fault features of machinery based on fourier decomposition method. IEEE Access 2019, 7, 183468–183478. [Google Scholar] [CrossRef]
- Pang, B.; Tang, G.; Tian, T. Enhanced singular spectrum decomposition and its application to rolling bearing fault diagnosis. IEEE Access 2019, 7, 87769–87782. [Google Scholar] [CrossRef]
- Yang, Z.; Boogaard, A.; Chen, R.; Dollevoet, R.; Li, Z. Numerical and experimental study of wheel-rail impact vibration and noise generated at an insulated rail joint. Int. J. Impact Eng. 2017, 113, 29–39. [Google Scholar] [CrossRef] [Green Version]
- Tajalli, M.R.; Zakeri, J.A. Numerical-experimental study of contact-impact forces in the vicinity of a rail breakage. Eng. Fail. Anal. 2020, 115, 104681. [Google Scholar] [CrossRef]
- Choi, J.Y.; Yun, S.W.; Chung, J.S.; Kim, S.H. Comparative study of wheel–rail contact impact force for jointed rail and continuous welded rail on light-rail transit. Appl. Sci. 2020, 10, 2299. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | 25 | 821 | 100:13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Z.; Yang, J.; Yao, D.; Wang, J.; Bai, Y. Subway Gearbox Fault Diagnosis Algorithm Based on Adaptive Spline Impact Suppression. Entropy 2021, 23, 660. https://doi.org/10.3390/e23060660
Hu Z, Yang J, Yao D, Wang J, Bai Y. Subway Gearbox Fault Diagnosis Algorithm Based on Adaptive Spline Impact Suppression. Entropy. 2021; 23(6):660. https://doi.org/10.3390/e23060660
Chicago/Turabian StyleHu, Zhongshuo, Jianwei Yang, Dechen Yao, Jinhai Wang, and Yongliang Bai. 2021. "Subway Gearbox Fault Diagnosis Algorithm Based on Adaptive Spline Impact Suppression" Entropy 23, no. 6: 660. https://doi.org/10.3390/e23060660