



Sensors 2023, 23(9), 4535; https://doi.org/10.3390/s23094535 - 06 May 2023
Cited by 1 | Viewed by 1586
Abstract
►
Show Figures
Dexterous robotic manipulation tasks depend on estimating the state of in-hand objects, particularly their orientation. Although cameras have been traditionally used to estimate the object’s pose, tactile sensors have recently been studied due to their robustness against occlusions. This paper explores tactile data’s
[...] Read more.
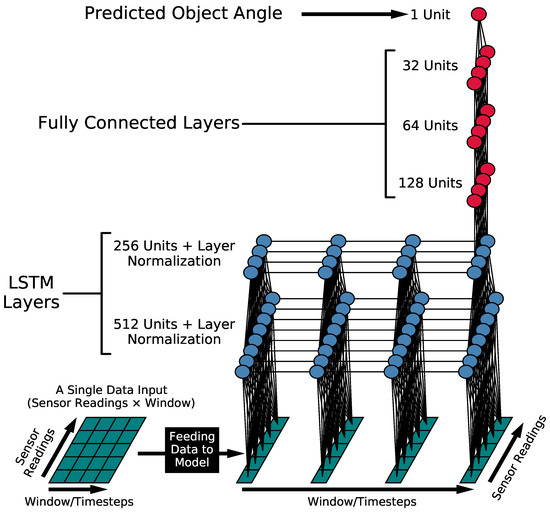
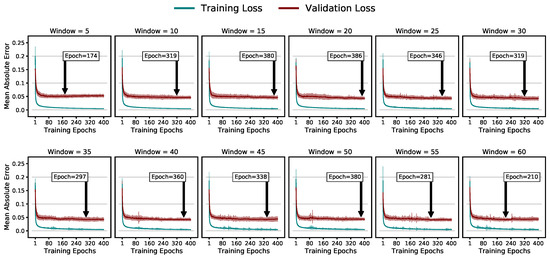
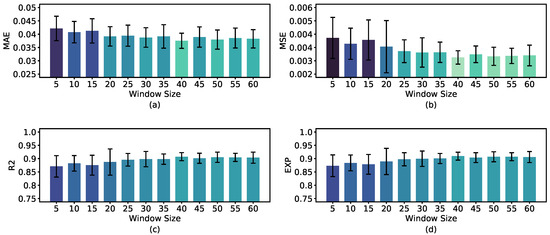
Dexterous robotic manipulation tasks depend on estimating the state of in-hand objects, particularly their orientation. Although cameras have been traditionally used to estimate the object’s pose, tactile sensors have recently been studied due to their robustness against occlusions. This paper explores tactile data’s temporal information for estimating the orientation of grasped objects. The data from a compliant tactile sensor were collected using different time-window sample sizes and evaluated using neural networks with long short-term memory (LSTM) layers. Our results suggest that using a window of sensor readings improved angle estimation compared to previous works. The best window size of 40 samples achieved an average of 0.0375 for the mean absolute error (MAE) in radians, 0.0030 for the mean squared error (MSE), 0.9074 for the coefficient of determination (R
Figure 1
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}