1. Introduction
Kalman filters (KFs) are well-known tools for system identification. They work by applying a predictor phase, in which a suitable model is needed to predict the evolution of a dynamic system, and a correction phase, in which corrections to the prediction are applied by recursively processing system measurements [
1].
In civil and mechanical engineering, different model classes, consisting of different parametrizations of the structure to be identified, can be formulated. They are built upon different levels of complexity in the description of the system mechanics and uncertainty in the formulation of the modelling assumptions. Emphasis is usually placed on improving the quality of the parameter estimate, especially whenever nonlinear dynamic systems are handled. With this goal, KF extensions such as the extended Kalman filter (EKF) or the unscented Kalman filter (UKF) have been introduced. On the contrary, model uncertainties are often disregarded or accounted for by a fictitious process noise. In this work, we propose a way to tackle this aspect by calculating a quantitative estimate, referred to as model evidence, measuring how much the model employed by the KF is plausible with respect to other possible parametrizations. While a similar estimate was discussed in [
2] for the EKF, here, we develop a model evidence formula suited for the UKF to exploit its ease of implementation and higher-order accuracy in the description of the evolution of the state mean and variance.
The remainder of the contribution is organized as follows: In
Section 2, first, the governing equations of a mechanical elasto-dynamic system are discussed; second, the related algorithm showing the application of the UKF for parameter estimation is reported and finally, the equations allowing for recursive model evidence calculation are presented. In
Section 3, a case study featuring a shear building excited by real ground acceleration is discussed, showing how parameter identification outcomes are affected by different structural parametrizations and how model evidence can be used for the sake of model selection a posteriori. Conclusions are finally discussed in
Section 4.
3. Results and Discussion
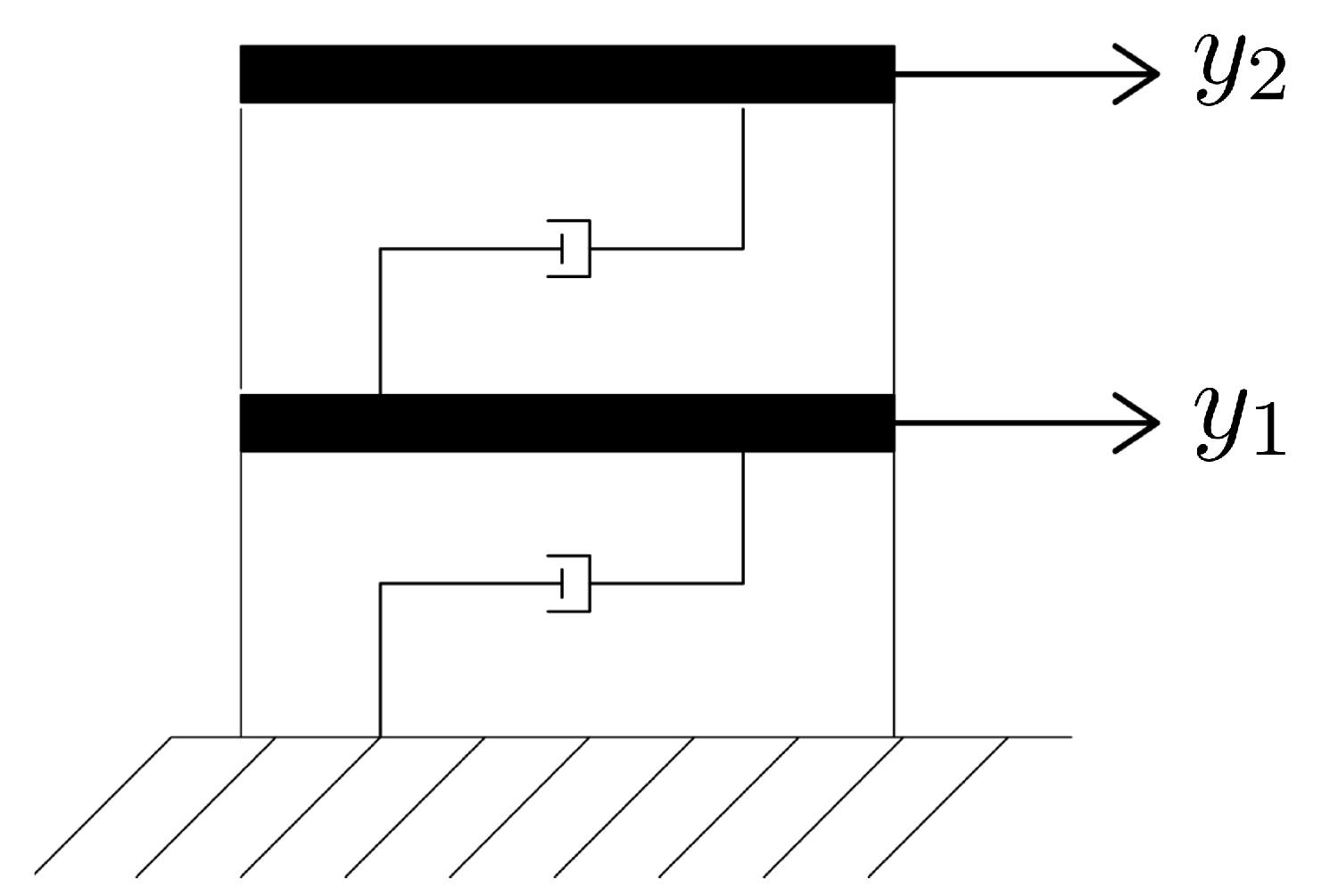
As a numerical case study, we studied how to determine the interstorey stiffness and damping of the two DOF shear building models (
) reported in
Figure 1. The mechanical properties of the building were adimensionalised to ease the UKF tuning by setting the matrices in Equation (
1) equal to
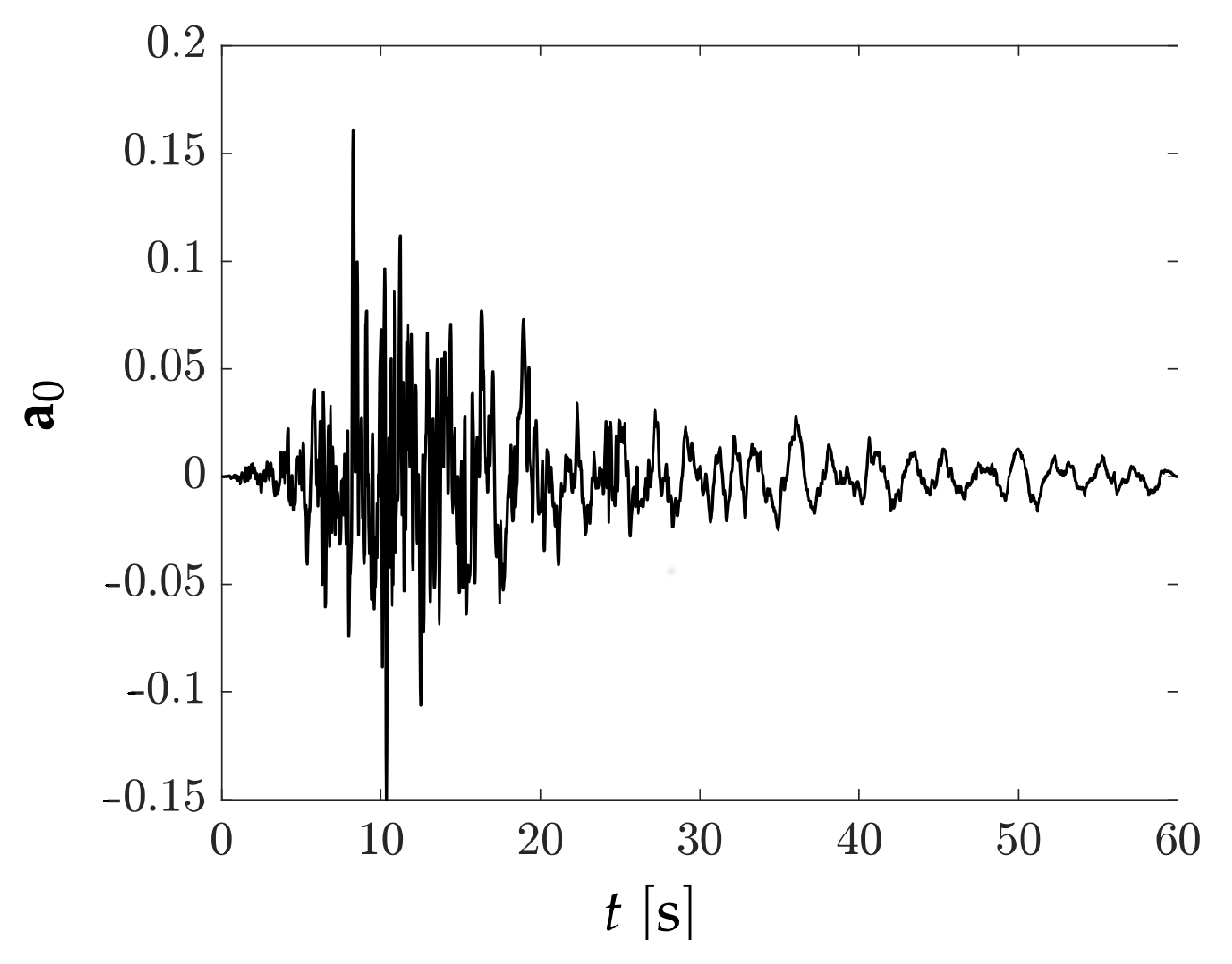
The building was excited by the ground acceleration
reported in
Figure 2, lasting
. The response of the building was monitored by recording the floor acceleration
with a sampling frequency of
for a total of
samples. A white noise, featuring a standard deviation of
, was added to
and to
to mimic the signal perturbation affecting micro-electro-mechanical accelerometers [
12].
The acceleration recordings coming from this reference building were used as measurements in the corrector phase of the filtering procedure (Steps 9 and 10 of Algorithm 1). Three model classes,
,
and
, featuring different structural parametrizations, were considered, as shown in the following:
Model class is governed by the parameter ruling the interstorey stiffness of both floors (for this reason, is factored out from ); is governed by ruling, respectively, the interstorey stiffness and damping of both floors; is governed by , where and rule the first and second floor interstorey stiffness and rules the damping associated with both floors. Comparing these parametrizations with the reference model, it is clear that is underparametrizing the mechanical system, not associating any parameter with the damping properties of the structures and suffering a model bias, being ; is overparametrizing the stiffness matrix and is performing a correct parametrization of the structural response, and it is therefore expected to allow for the best estimate of the system mechanical properties. For all model classes, the initial guesses of the relevant parameters underestimated by of the parameter values ruling the reference structure.
KF tuning is usually problem-dependent and is performed through a trial-and-error procedure. In this case, we have set the SP scaling parameters to , and ; the measurement noise covariance to , where is the identity matrix; the process noise covariance to , with ; and the initial parameter covariance to . The value of depends on the number of parameters employed by each model ( for , for and for ).
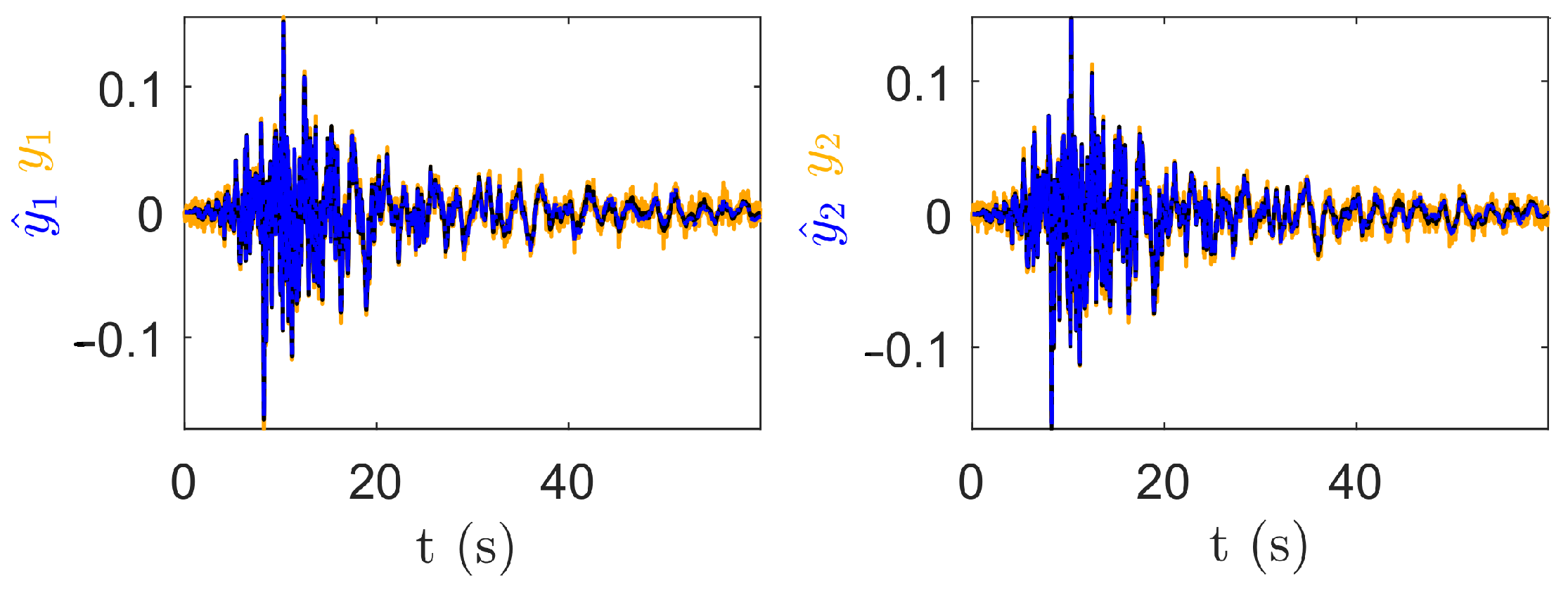
In
Figure 3, the predicted output of
, computed according to Step 8 of Algorithm 1, is reported against the floor acceleration measurements, showing the filter capacity of tracking the shear building accelerations despite the presence of noise. A small discrepancy between the reference model and the predicted output is observable only magnifying the curves. The predicted outputs of
and
, not reported for lack of space, exhibit an even smaller discrepancies.
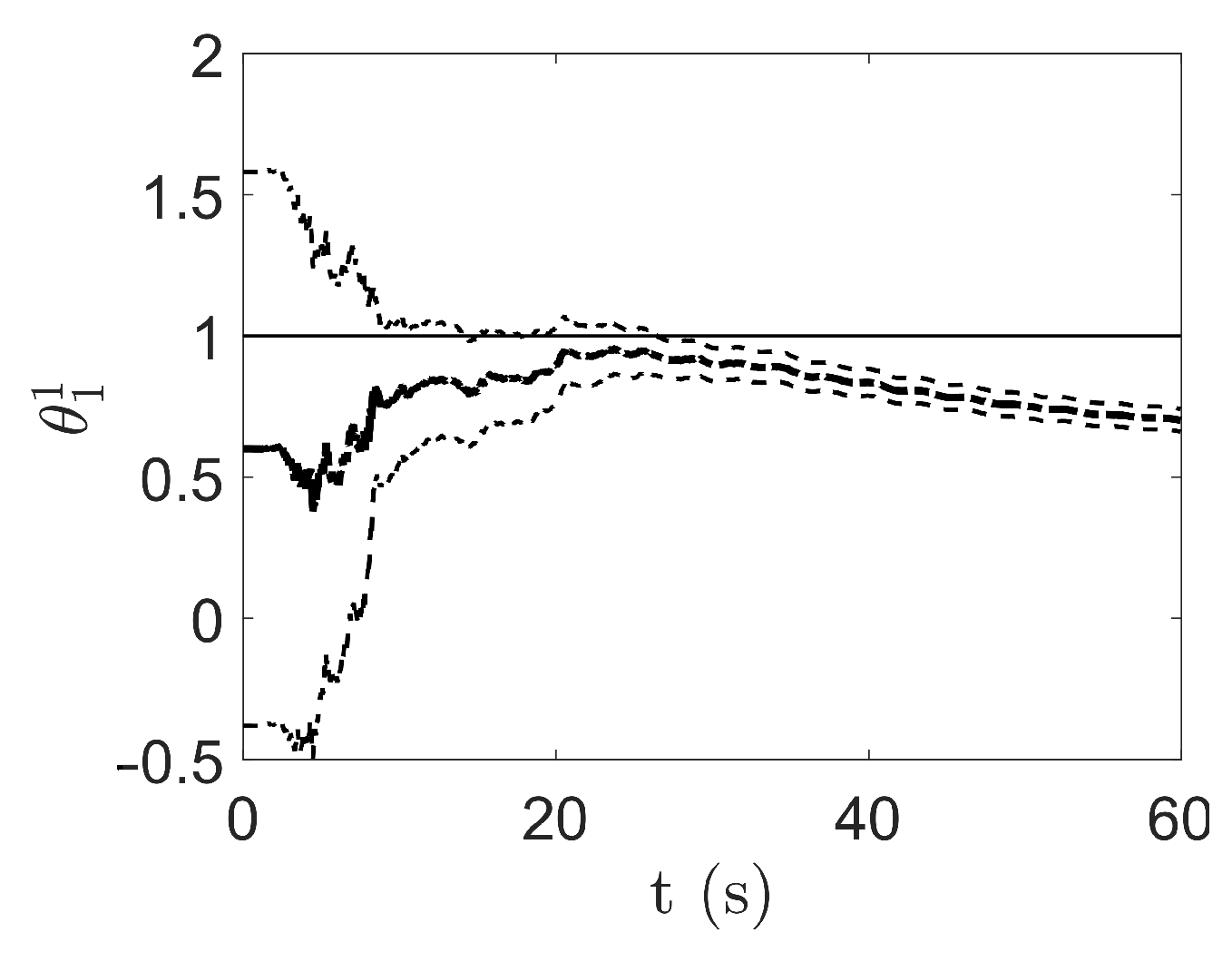
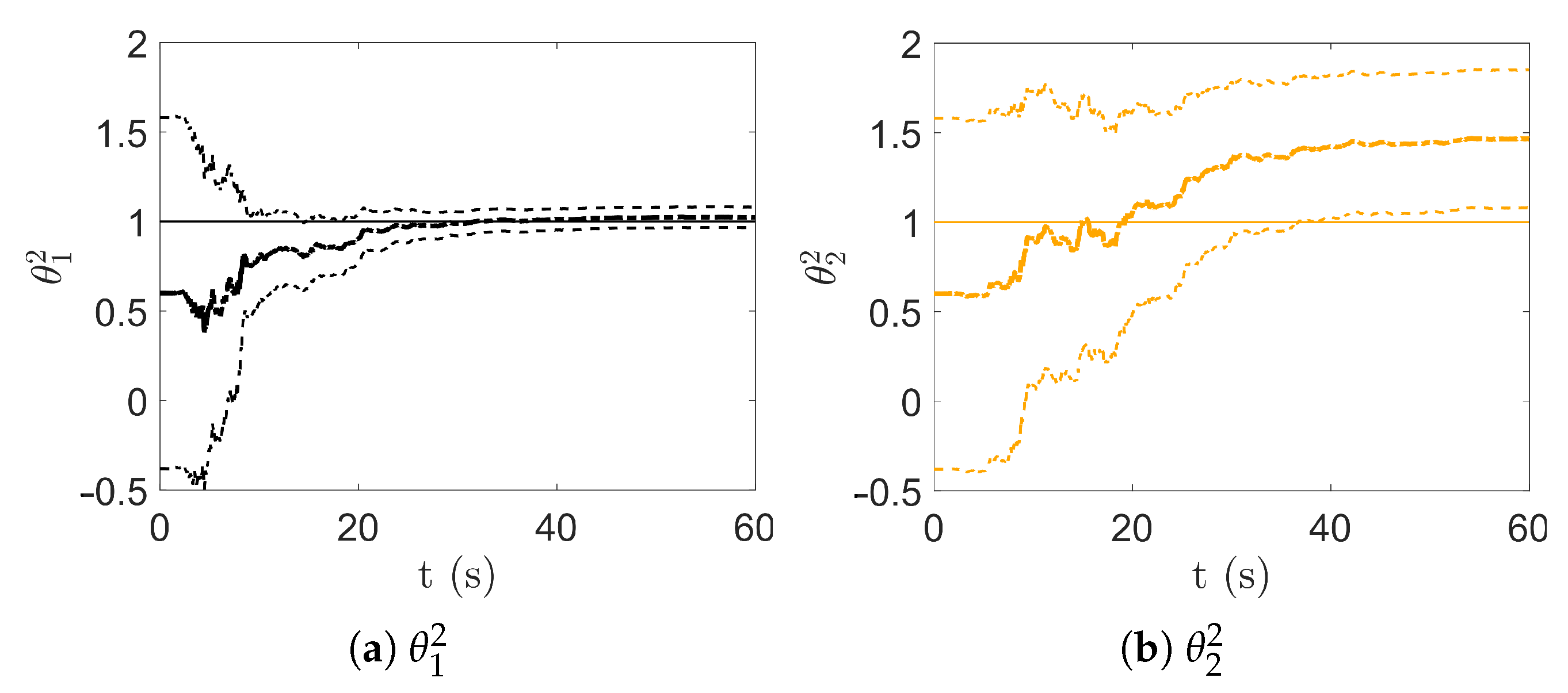
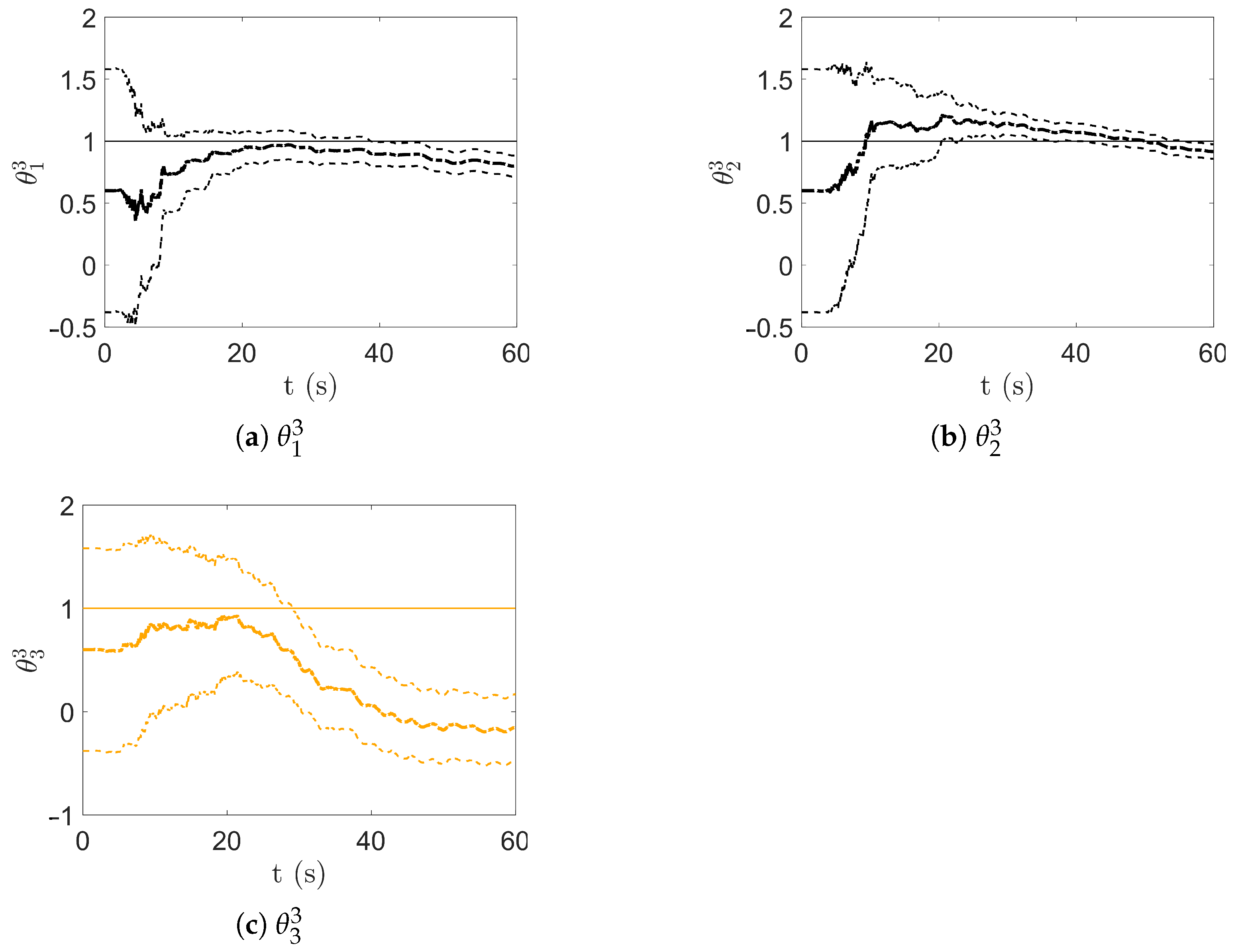
The filter capacity of tracking the system output was expected to greatly help parameter identification. In
Figure 4,
Figure 5 and
Figure 6, the time evolution of the parameters employed by
,
and
are reported, respectively. Black colour is used for parameters involved in the expression of the structural stiffness; orange colour when related to the structural damping. The plots report both the parameter posterior estimates and the confidence intervals of these estimates. Looking at the confidence intervals, stiffness-related parameters seem to assume negative values during the first part of the analyses. This is due to to the initial choice of
. However, positive values have been always associated with the interstorey stiffness due to the use of the scaled version of the UKF. Similar reasoning applies to damping-related parameters.
Looking at
Figure 4, the UKF was unable to provide a correct estimate for
, despite the uncertainty reduction linked to the narrowing of the confidence interval. Even the stiffness-related parameters
and
of
, depicted in
Figure 6, seem not able to converge to the desired value. On the contrary, coming to
,
was correctly identified with small uncertainty, as shown in
Figure 5. These results were somehow expected due to the underparametrization of the mechanical system operated by
and the overparametrization of the mechanical system exhibited by
, while
embodied the correct description of the reference model.
Model class
was unable to provide any idea of the damping properties, ending up pushing
to 0. Model class
provided a better estimate, still quite poor, overestimating by
the damping related parameter
. These difficulties were due to the relevance of damping in the identification of continuously excited structures, discussed in [
4].
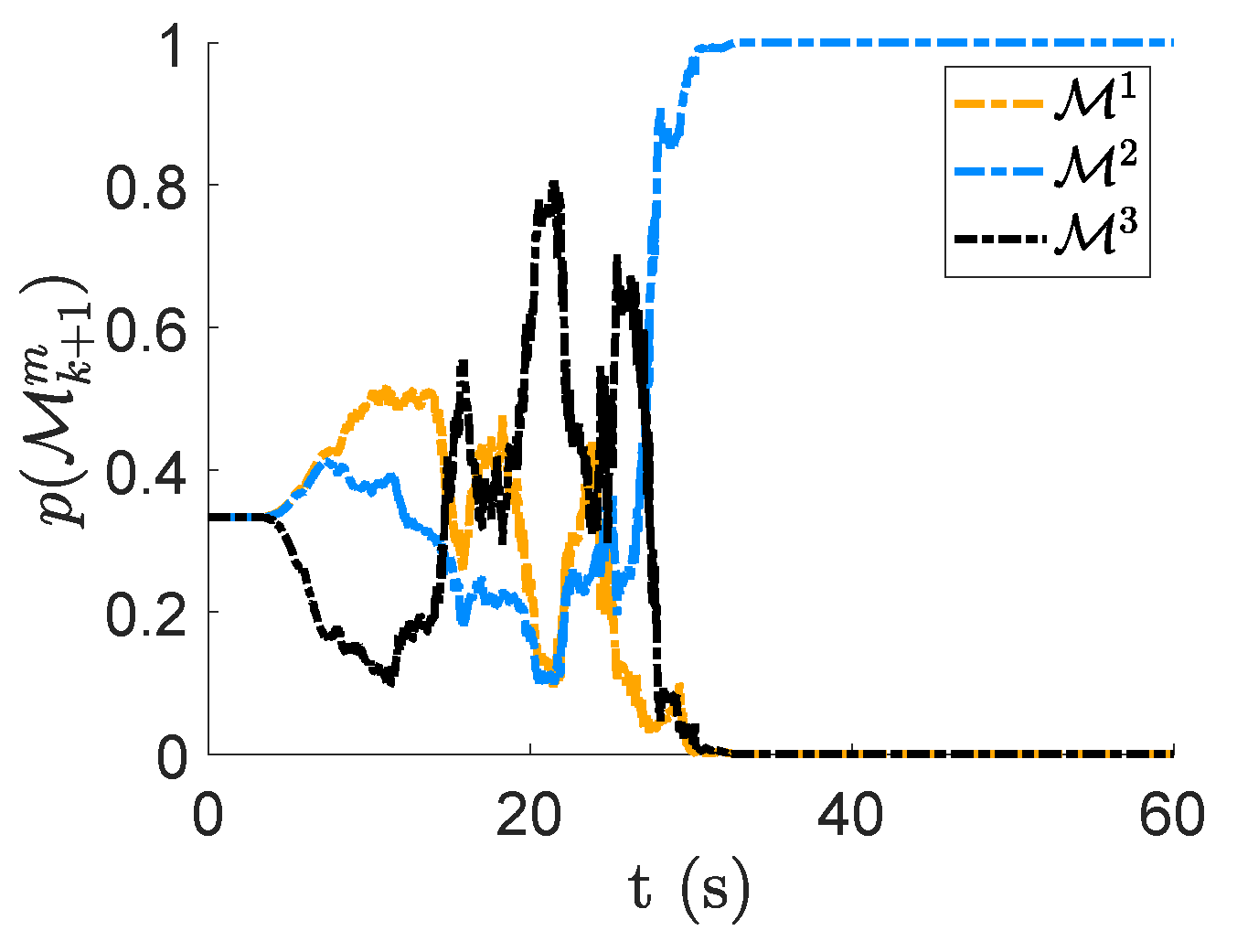
From the results reported above,
seems to lead to the best system identification; however, we reached this conclusion by knowing the mechanical properties of the reference system. It would have been very hard, if not impossible, to judge model plausibility simply looking at the predicted outputs. Indeed, as shown in
Figure 3, the UKF has been able to reproduce the monitoring system outcome even when
is employed. For this reason, model evidence computation, whose outcome is reported in
Figure 7, is extremely relevant to understand which model can be trusted the most.
At the beginning of the identification procedure, equal plausibility was associated with the three models. Their values were recursively updated as soon as new measurements became available using Equations (
7) and (
8). During the first part of the analysis,
appeared to be the most plausible model class. This is in agreement with intuition:
is the easiest to tune, employing just one parameter, and the bias in the modelling of damping has a marginal relevance when
due to the strong ground motion undergone by the structure. In a second stage,
resulted to be the most plausible model class. This was due to the good estimate of both the stiffness-related parameters and the damping-related parameters in the central part of the analysis. Finally, the overcomplexity of
led to a deterioration of the parameter identification, while the good convergence of the stiffness-related parameters and the reasonable damping estimate promoted
as the most plausible model class.
This numerical example shows that model evidence evaluation can be successfully used for model selection. The reader should note that, due to the recursive nature of Equation (
7), a certain time delay occurred between the improved identification capacity of the filter equipped with a certain model and the increase in plausibility of this model.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






