
Comparison between Two Competing Newton-Type High Convergence Order Schemes for Equations on Banach Spaces


Abstract
:1. Introduction
2. Convergence: Scheme 1
3. Convergence: Scheme 2
4. Numerical Results
5. Extraneous Fixed Points
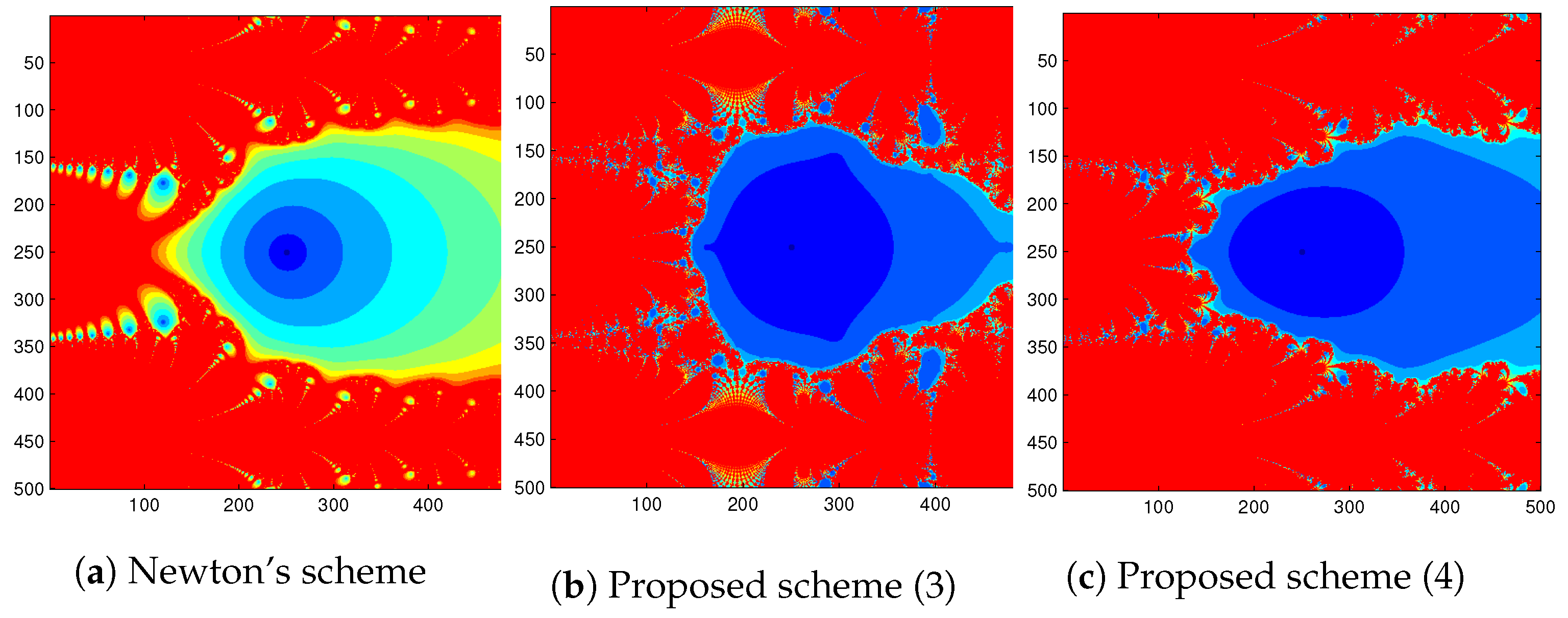
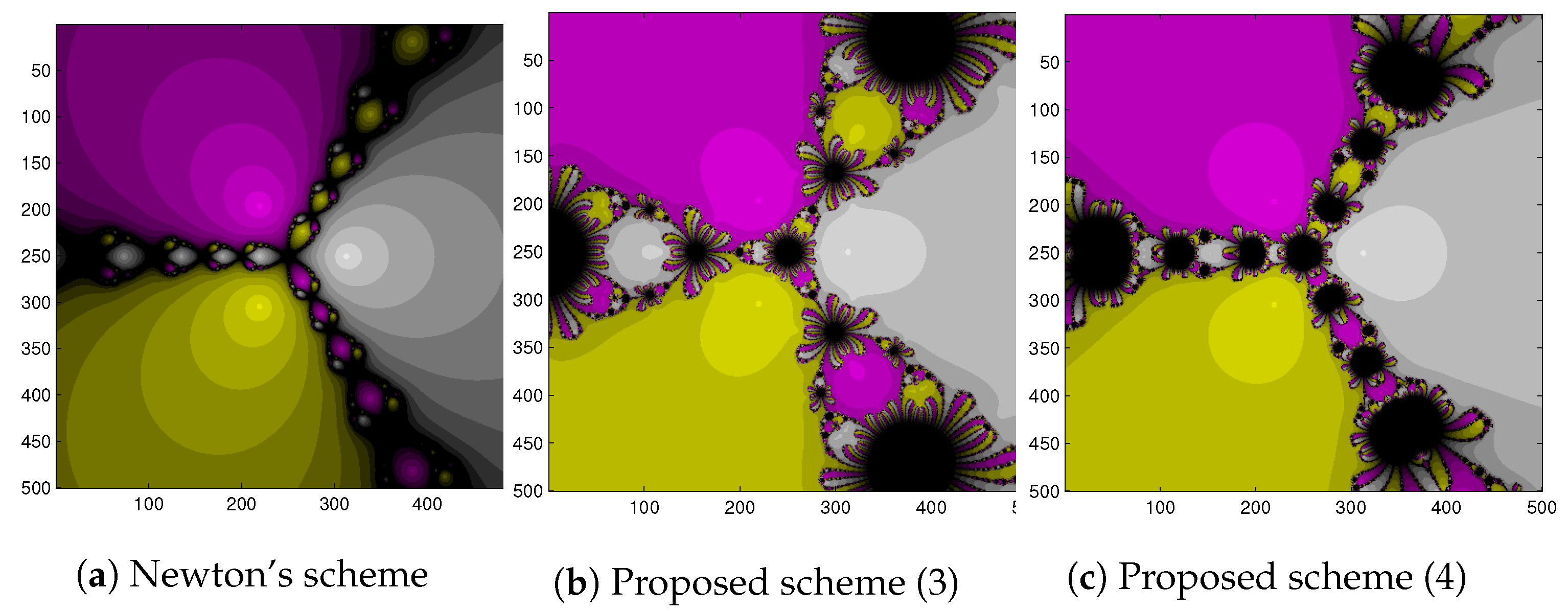
6. Dynamics of Scheme
6.1. For Example 1
- 1.
- The basins for all the iterative schemes contain a fractal Julia set and the basins of all the schemes look almost similar.
- 2.
- The basins of attraction of the second-order Newton scheme contain a higher number of orbits and are less dark in comparison with the ninth-order schemes.
- 3.
- Again, the Fatou set with blue color shows the basins of the schemes. The blue-colored area shows that the proposed scheme (4) contains the Fatou set with bigger and darker orbits.
6.2. For Example 2
7. Convergence Radii
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, M.K. A Six-order variant of Newton’s method for solving non linear equations. Comput. Meth. Sci. Technol. 2009, 15, 185–193. [Google Scholar] [CrossRef]
- Vrscay, E.R.; Gilbert, W.J. Extraneous fixed points, basin boundaries and chaotic dynamics for Schroder and Konig rational iteration functions. Numer. Math. 1987, 52, 1–16. [Google Scholar] [CrossRef]
- Wang, K.; Kou, J.; Gu, C. Semilocal convergence of a sixth-order jarrat method in Banach spaces. Numer. Algorithms 2011, 57, 441456. [Google Scholar] [CrossRef]
- Singh, M.K.; Singh, A.K. Variant of Newton’s Method Using Simpson’s 3/8th Rule. Int. J. Appl. Comput. 2020, 6, 20. [Google Scholar] [CrossRef]
- Argyros, I.K. Convergence and Applications of Newton-Type Iterations; Springer: Berlin, Germany, 2008. [Google Scholar]
- Argyros, I.K.; Magrenan, A.A. Iterative Methods and Their Dynamics with Applications: A Contemporary Study; Taylor and Francis: Boca Raton, FL, USA, 2017. [Google Scholar]
- Cordero, A.; Torregrosa, J.R. Variants of Newton’s method using fifth-order quadrature formulas. Appl. Math. Comput. 2007, 190, 686–698. [Google Scholar] [CrossRef]
- Grau-Sánchez, M.; Grau, A.; Noguera, M. On the computational efficiency index and some iterative methods for solving systems of nonlinear equations. J. Comput. Appl. Math. 2011, 236, 1259–1266. [Google Scholar] [CrossRef]
- Homeier, H.H.H. A modified Newton method with cubic convergence: The multivariable case. J. Comput. Appl. Math. 2004, 169, 161–169. [Google Scholar] [CrossRef]
- Homeier, H.H.H. On Newton-type methods with cubic convergence. J. Comput. Appl. Math. 2005, 176, 425–432. [Google Scholar] [CrossRef]
- Jarratt, P. Some fourth order multipoint iterative methods for solving equations. Math. Comput. 1996, 20, 434–437. [Google Scholar] [CrossRef]
- Kantorovich, L.V.; Akilov, G.P. Funtional Analysis; Pergamon Press: Oxford, UK, 1982. [Google Scholar]
- Xiao, X.Y.; Yin, H.W. Accelerating the convergence speed of iterative methods for solving nonlinear systems. Appl. Math. Compt. 2018, 333, 8–19. [Google Scholar] [CrossRef]
- Xiao, X.Y.; Yin, H. Achieving higher order of convergence for solving systems of nonlinear equations. Appl. Math. Compt. 2017, 311, 251–261. [Google Scholar] [CrossRef]
- Cordero, A.; Torregrosa, J.R. Variants of Newton’s method for functions of several variables. Appl. Math. Comput. 2006, 183, 199–208. [Google Scholar] [CrossRef]
- Sharma, J.R.; Guha, R.K.; Sharma, R. An efficient fourth order weighted-Newton method for systems of nonlinear equations. Numer. Algorithms 2013, 62, 307–323. [Google Scholar] [CrossRef]
- Noor, M.A.; Waseem, M. Some iterative methods for solving a system of nonlinear equations. Comput. Math. Appl. 2009, 57, 101–106. [Google Scholar] [CrossRef]
- Cordero, A.; Martínez, E.; Torregrosa, J.R. Iterative methods of order four and five for systems of nonlinear equations. J. Comput. Appl. Math. 2009, 231, 541–551. [Google Scholar] [CrossRef]
- Sharma, J.R.; Gupta, P. An efficient fifth order method for solving systems of nonlinear equations. Comput. Math. Appl. 2014, 67, 591–601. [Google Scholar] [CrossRef]
- Argyros, I.K. Computational Theory of Iterative Methods, Series: Studies in Computational Mathematics; Elsevier Publishing Company: New York, NY, USA, 2007. [Google Scholar]
- Xiao, X.Y.; Yin, H.W. A new class of methods with higher order of convergence for solving systems of nonlinear equations. Appl. Math. Comput. 2015, 264, 300–309. [Google Scholar] [CrossRef]
- Xiao, X.Y.; Yin, H.W. Increasing the order of convergence for iterative methods to solve nonlinear systems. Calcolo 2016, 53, 285–300. [Google Scholar] [CrossRef]
- Sandor, K. Optimizing single Slater determinant for electronic Hamiltonian with Lagrange multipliers and Newton-Raphson methods as an alternative to ground state calculations via Hartree-Fock self consistent field. AIP Conf. Proc. 2019, 2116, 450030. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Scheme | N | x | |
|---|---|---|---|
| 1 | 1.00000000 | 1.71828182845905 | |
| 2 | 0.36787944117144 | 0.44466786100977 | |
| 3 | 0.06008006872679 | 0.06192156984951 | |
| Newton scheme | 4 | 0.00176919944264 | 0.00177076539934 |
| 5 | 1.564112013019425 | ||
| 6 | 1.223321565989411 | 1.223243728531998 | |
| 7 | 7.783745890945912 | 0.00000000 | |
| 1 | 1.00000000 | 1.71828182845905 | |
| Proposed scheme (3) | 2 | −8.566001524658931 | −8.562333752899498 |
| 3 | 8.017605522905244 | 0.00000000 | |
| 1 | 1.00000000 | 1.71828182845905 | |
| Proposed scheme (4) | 2 | 0.00180663140457 | 0.00180826434631 |
| 3 | 3.652768952695270 | 0.00000000 |
| Scheme | N | x | |
|---|---|---|---|
| 1 | 3.50000000 | 41.87500000000000 | |
| 2 | 2.36054421768707 | 12.15335132155504 | |
| 3 | 1.63351725484243 | 3.35884252127395 | |
| 4 | 1.21393130681298 | 0.78888464195259 | |
| Newton scheme | 5 | 1.03548645503746 | 0.11028191827017 |
| 6 | 1.00120223985296 | 0.00361105743855 | |
| 7 | 1.00000144306722 | 4.329207893061238 | |
| 8 | 1.00000000000208 | 6.247669048775606 | |
| 9 | 1.0000000000 | 0.00000000 | |
| 1 | 3.50000000 | 41.87500000000000 | |
| 3 | 0.80025523102213 | −0.48750980007799 | |
| Proposed scheme (3) | 3 | 1.00000382289483 | 1.146872833501789 |
| 4 | 1.0000000000 | 0.00000000 | |
| 1 | 3.50000000 | 41.87500000000000 | |
| 3 | 1.25206208985764 | 0.96280700078081 | |
| Proposed scheme (4) | 3 | 1.00000264945961 | 7.948399889379232 |
| 4 | 1.0000000000 | 0.00000000 |
| Scheme | N | x | y | ||
|---|---|---|---|---|---|
| Newton scheme | 1 | 0.15000 | 0.15000 | −0.3275 | −0.4275 |
| 2 | −0.427747 | −0.350824 | 0.333792 | 0.250825 | |
| 3 | −0.38617 | −0.0526016 | 0.00172869 | 0.0889367 | |
| 4 | −0.289566 | −0.125484 | 0.00933237 | 0.00531187 | |
| 5 | −0.286091 | −0.118164 | 0.0000120741 | 0.0000535827 | |
| 6 | −0.286032 | −0.118186 | |||
| 7 | −0.286032 | −0.118186 | 0.000 | 0.000 | |
| Proposed scheme (3) | 1 | 0.15000 | 0.15000 | −0.3275 | −0.4275 |
| 2 | −0.182026 | −0.240876 | 0.0740096 | −0.0599525 | |
| 3 | −0.285858 | −0.119056 | 0.000770476 | 0.0000322954 | |
| 4 | −0.286032 | −0.118186 | 0.000 | 0.000 | |
| Proposed scheme (4) | 1 | 0.15000 | 0.15000 | −0.3275 | −0.4275 |
| 2 | −3.35161 | 3.60474 | 7.42857 | 16.0457 | |
| 3 | −0.692548 | −0.017514 | 0.297137 | 0.39285 | |
| 4 | −0.283154 | −0.117859 | −0.00196551 | −0.00295 | |
| 5 | −0.286032 | −0.118186 | 0.000 | 0.000 |
| Scheme | N | x | y | ||
|---|---|---|---|---|---|
| N S | 1 | 0.100000 | 0.100000 | 0.3800000 | 5.580000 |
| 2 | 0.546677740863787 | 0.998504983388704 | 1.614622410348670 | −0.3990420083663530 | |
| 3 | 0.743165400858219 | 0.993160847303442 | 0.0000571195809957458 | −0.077214801060175 | |
| 4 | 0.732143079420105 | 0.982093540416835 | 0.0002449705634444132 | −0.0002429831397698922 | |
| 5 | 0.732143679421334 | 0.982063247881604 | 1.835275931227897 | −7.20090653771876 | |
| 6 | 0.732143679685749 | 0.982063247916927 | −2.22044604925031 | 0.000000 | |
| P S (3) | 1 | 0.100000 | 0.100000 | 0.380000 | 5.580000 |
| 2 | 0.722765263946543 | 0.978781853059981 | 0.0490331324266399 | 0.01602697777088990 | |
| 3 | 0.732143693471214 | 0.982063269995640 | 6.47619073923522 | −1.618596074948186 | |
| 4 | 0.732143679685749 | 0.982063247916927 | −2.22044604925031 | 0.000000 | |
| P S (4) | 1 | 0.100000 | 0.100000 | 0.380000 | 5.580000 |
| 2 | 0.732171811623760 | 0.982089790124268 | 0.0000146207603477499 | −0.0001821979719456301 | |
| 3 | 0.732143679685749 | 0.982063247916927 | −2.22044604925031 | 0.000000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Argyros, I.K.; Singh, M.K.; Regmi, S. Comparison between Two Competing Newton-Type High Convergence Order Schemes for Equations on Banach Spaces. Foundations 2023, 3, 643-659. https://doi.org/10.3390/foundations3040039
Argyros IK, Singh MK, Regmi S. Comparison between Two Competing Newton-Type High Convergence Order Schemes for Equations on Banach Spaces. Foundations. 2023; 3(4):643-659. https://doi.org/10.3390/foundations3040039
Chicago/Turabian StyleArgyros, Ioannis K., Manoj K. Singh, and Samundra Regmi. 2023. "Comparison between Two Competing Newton-Type High Convergence Order Schemes for Equations on Banach Spaces" Foundations 3, no. 4: 643-659. https://doi.org/10.3390/foundations3040039