1. Introduction
Consider the following stochastic semilinear space–time fractional wave equation driven by fractionally integrated additive noise, with
where
D is a bounded domain in
with smooth boundary
, and
and
represent the Caputo fractional derivative of order
and the Riemann–Liouville fractional integral of order
respectively. In addition,
is the fractional Laplacian and
denotes the space–time noise defined on a complete filtered probability space
The initial values
and
and the nonlinear function (source term)
are given functions.
The space–time fractional wave equation, denoted as (
1) when devoid of noise, has been extensively explored by researchers due to its wide range of applications in engineering, physics, and biology [
1,
2,
3]. The inclusion of the noise term
allows for the characterization of random effects influencing the particle movement within a medium with memory or particles experiencing sticking and trapping phenomena. An example of such noise is the fractionally integrated noise
, where the past random effects impact the internal energy [
4]. For physical systems, stochastic perturbations arise from many natural sources, which cannot always be ignored. Therefore, it is necessary to include them in the corresponding deterministic model.
It is not possible to find the analytic solution of the space–time fractional Equation (
1). Therefore, one needs to introduce and analyze some efficient numerical methods for solving (
1). Li et al. [
5] considered the Galerkin finite element method of (
1) for the linear case with the additive Gaussian noise, that is,
and
, and obtain the error estimates. In [
6], the authors studied the Galerkin finite element method for approximating the semilinear stochastic time-tempered fractional wave equations with multiplicative Gaussian noise and additive fractional Gaussian noise, but they only established error estimates for
. Extensive theoretical results exist for the stochastic subdiffusion problem with
, as seen in works such as [
7,
8,
9,
10,
11,
12], alongside corresponding numerical approximations in works including [
13,
14,
15,
16,
17]. Regarding the theoretical and numerical findings for the stochastic wave equation, we recommend exploring references such as [
18,
19,
20,
21]. For theoretical advancements in fractional-order nonlinear differential equations, recent works such as [
22,
23,
24,
25,
26,
27] and their references provide a comprehensive overview.
In this paper, our focus lies on the application of the Galerkin finite element method to solve (
1). Firstly, we establish the existence of a unique solution for (
1) using the Banach fixed point theorem. Additionally, we analyze the spatial and temporal regularities of the solution. To approximate the noise, we employ a piecewise constant function in time, resulting in a stochastic regularized equation. This equation is then tackled using the Galerkin finite element method. We provide corresponding error estimates, utilizing the various smoothing properties exhibited by the Mittag–Leffler functions. We extend the error estimates in [
5] from the linear case of (
1) with Gaussian additive noise to the semilinear case with the more general integrated additive noise. We also extend the error estimates of [
6] for the stochastic semilinear time fractional wave equation from
to
.
To establish our error estimates, we employ a similar argument as developed in our recent work [
28], which focused on approximating the stochastic semilinear subdiffusion equation with
. We demonstrate that the solution’s spatial and temporal regularities for (
1) with
surpass those with
. Moreover, we observe that the convergence orders of the Galerkin finite element method for (
1) with
are higher than those with
, as expected.
The paper is organized as follows. In
Section 2, we provide some preliminaries and notations. In
Section 3, we focus on the continuous problem and establish the existence, uniqueness, and regularity results for the problem (
1). In
Section 4, we discuss the approximation of the noise and obtain an error estimate for the regularized stochastic semilinear fractional superdiffusion problem. In
Section 5, we consider the finite element approximation of the regularized problem and derive optimal error estimates. Finally, in
Section 6, we present numerical experiments that validate our theoretical findings.
Throughout this paper, we denote C as a generic constant that is independent of the step size and the space step size h, which could be different at different occurrences. Additionally, we always assume is a small positive constant.
2. Notation and Preliminaries
This section provides notations and preliminary results that will be used in subsequent sections. We denote as the space of Lebesgue measurable or square integrable functions on D, with norm and inner product . Additionally, we denote . We assume that with domain is a closed linear self-adjoint positive definite operator with a compact inverse. Moreover, A has the eigenpairs , , subject to homogeneous Dirichlet boundary conditions.
Set
or simply
for any
as a Hilbert space induced by the norm
For we denote by For any function define Let be a separable Hilbert space of all measurable square-integrable random variables with values in such that where denotes the expectation.
Define the space–time noise
by, see [
28],
where
are some real-valued continuous functions rapidly decaying with respect to
k. Here, the sequence
is mutually independent and identically distributed one-dimensional standard Brownian motions, and the white noise
is the formal derivative of the Brownian motion
Lemma 1 ([
28])
. (It isometry property) Let be a strongly measurable mapping such that Let denote a real-valued standard Brownian motion. Then, the following isometry equality holds for : To represent the solution of (
1) in the integral form, we utilize the Laplace transform technique to write down the solution representation in terms of the Mittag–Leffler functions. The Mittag–Leffler functions are defined in [
28], and we use them to express the solution in a compact form.
The following Lemma is related to the bounds of the Mittag–Leffler functions.
Lemma 2 ((Mittag–Leffler function property) [
28])
. Let and . Let be defined by (4). Suppose that μ is an arbitrary real number such that Then, there exists a constant such thatMoreover, for it follows that 4. Approximation of Fractionally Integrated Noise
Let
be the discretization of
and
be the time step size. The noise
can be approximated by using Euler method,
with
,
, where
, and
is the normally distributed random variable with mean 0 and variance 1. Assume that
is some approximation of
. To be able to obtain an approximation of
in (
1), we replace it with
here,
is the characteristic function for the
ith time step length
and
is some approximations of
. The following is the regularized stochastic space–time fractional superdiffusion problem. Let
be an approximation of
u defined by
The solution of (
32) takes the following form:
Here, where is the characteristic function defined on .
Assumption 5 ([
5])
. Suppose that the coefficients are generated in such a way that To regularize the noise , we need the following regularity assumption.
Assumption 6. Let It holds, with where κ is defined byand are the eigenvalues of the Laplacian with . By following similar proofs as in Theorems 1 and 2, we can establish the following theorems for the approximate solution .
Theorem 4 (Existence and uniqueness)
. Let Suppose that Assumptions 1–6 hold. Let There exists a unique mild solution given by (33) to the problem (32), for all Theorem 5 (Regularity)
. Let . Suppose that Assumptions 1–6 hold. Let with and with . Then the following regularity result for the solution of Equation (33) holds with and , Theorem 6. Let . Suppose that Assumptions 1–6 hold. Let u and be the solutions of Equations (1) and (32), respectively. We have, for any given Proof. Subtracting (
33) from (
11), we obtain
where
and
By the definitions of
and
, we now rewrite
as
where
and
We first estimate
From the form of
, using the smoothing property of the operator
and Assumption 1, we arrive with
at
For the estimate of
, using the Ito isometry property and Assumption 6, we obtain
Note that, for
a use of the boundedness property of the Mittag–Lefler function yields
Furthermore, for
by using the asymptotic property of the Mittag–Lefler function, we have
We now estimate
. We first denote
by
and replace the variable
s with
in the second term of
. Using the orthogonality property of
we obtain
Thus, a use of the Cauchy–Schwarz inequality yields
For
, using the mean value theorem and the Assumption 5, we arrive at
Now, following the same estimates as in (
41)
For
, we note by the Mittage–Leffler function property that
hence,
Now we estimate
for the different
and
. We shall show that, with
,
Case 1. We now consider the case
. If
, then with
, it implies that
Since
, for
and
then for
,
and this implies that
Similarly, we may show that for
, with
,
Therefore, we obtain, for
,
Case 2. Next, consider the case
. If
then we obtain,
Similarly, for
, it follows that
Therefore, for
we obtain,
Thus, we derive the following estimate for
. For
Together with these estimates we obtain the following results.
For
, it follows that for
,
An application of the Gronwall’s Lemma completes the rest of the proof. □
5. Finite Element Approximation and Error Analysis
Let
D be the spatial domain and let
be a shape regular and quasi-uniform triangulation of the domain
D with spatial discretization parameter
, where
is the diameter of
K. Let
,
be the piecewise linear finite element space with respect to the triangulation
, that is,
Let and be the projection and fractional Ritz projection defined by and . We then have
Lemma 6 ([
28])
. The operators and satisfyand Let
be the discrete Laplacian operator defined by
. Assume that
are the eigenpairs of the discrete Laplacian, that is,
where
forms an orthonormal basis of
. Further, we introduce the following fractional discrete Laplacian
, for
,
For the discrete norm can be defined by .
The semi-discrete finite element method approximation of Equation (
32) is to seek
, for
such that
where
are chosen as
projections of the initial functions
.
As it is in the continuous case, the solution of (
57) takes the form
where for each
the operators
,
and
are defined from
by
We have the following smoothing properties:
Lemma 7 ([
5])
. For any and , there holds for Lemma 8 ([
5])
. (Inverse Estimate in ) For any there exists a constant C independent of h such that We now consider the error estimates.
Theorem 7. Let , , Suppose that Assumptions 1–6 hold. Let and be the solutions of (32) and (57), respectively. Let with . Then, there exists a positive constant C such that for any , with and , Proof. Introducing
as a solution of an intermediate discrete system
We split the error
. Again using
we split
From Lemma 6 it follows that, with
which means that
To estimate
, note that
satisfies the following equation
and hence, the representation of solution
is written as
Choose
and
separately, from Lemma 6 with
and Lemma 7, it follows that for
and
that
Now an application of regularity shows
where we used the fact that
since
and
. We now combine (
63), (
66), and (
67) to arrive at an estimate for
as, with
and
,
Now to estimate
, note that
satisfies
and therefore we now write
in the integral form as
Again, choose
. From Lemma 6 with
and Lemma 7, it follows for
and for
that
Combining (
68) and (
71) it follows for
and
, and
that
An application of the Gronwall’s Lemma completes the rest of the proof. □
The main result of this paper is obtained by combining Theorems 6 and 7.
Theorem 8. Let , . Suppose that Assumptions 1–6 hold. Let u and be the solutions of (1) and (57), respectively. Let with Then, there exists a positive constant C such that, for any with and Remark 1. In particular, when the noise is the trace class noise, i.e., In this case we have , , , where , , , we obtain with which are consistent with the results for the stochastic heat equation. 6. Numerical Simulations
In this section, we will explore three numerical examples of the stochastic semilinear fractional wave equation. For simplicity, we will focus on the Laplacian operator, that is,
in Equation (
1). Our goal is to approximate Equation (
1) with various functions
and examine the experimentally determined orders of convergence in time. We consider both the cases of trace class and white noises. Specifically, we choose the following functions:
,
, and
. By comparing the experimentally determined orders of convergence with the theoretical findings in Theorem 8, we observe consistent results, as expected. All the numerical simulations in this paper are performed on an Acer Aspire 5 Laptop.
To complete this, let us first introduce the numerical method for solving (8). Consider, with
,
where
and
are given smooth functions. Here, with
,
where
are the Brownian motions. Here,
denotes the eigenfunctions of the operator
with
. Further, let
be the eigenpairs of the covariance operator
Q of the stochastic process
, that is,
We shall consider two cases in our numerical simulations.
Case 1: The white noise case, e.g.,
with
, which implies that
where
denotes the trace of the operator
Q.
Case 2: The trace class case, e.g.,
with
, which implies that
The numerical methods for solving stochastic time fractional partial differential equations are similar to the numerical methods for solving deterministic time fractional partial differential equations. The only difference is that we have the extra term g in the stochastic case and we need to consider how to approximate g.
Let
. Then (
75)–(
77) can be written as the following:
Since the initial values
in (
79)–(
81), it is easier to consider the numerical analysis for the time discretization scheme of (
79)–(
81).
Let be a partition of the time interval and the time step size. Let be a partition of the space interval and h the space step size.
Let
be the piecewise linear finite element space defined by
The finite element method of (
79)–(
81) is to find
such that,
,
where
denotes the
projection operator.
Let
be the approximation of
. We define the following time discretization scheme: find
, with
, such that,
,
where the weights are generated using the Lubich’s convolution quadrature formula, with
,
Let
be the linear finite element basis functions defined by, with
,
To find the solution
, we assume that
for some coefficients
. Choose
in (
84), we have, with
,
where we assume the initial values
and
have the following expressions:
To solve (
86) using MATLAB, we need to write (
86) into the matrix form, which we demonstrate below.
After some simple calculations, we may obtain the following mass and stiffness metrics
and
respectively. Then, (
86) can be written as the following matrix form,
,
Denote
. Then, (
87) can be written as, with
,
Hence
can be calculated using the following formula
We now consider how to calculate
. The kth component
in
can be approximated by using the following formula:
where, with
,
See the MATLAB code in
Appendix A.1 for calculating kth element of
in
.
We next consider how to calculate
, which is more complicated than
. Approximating the Riemann–Liouville fractional integral by the Lubich first-order convolution quadrature formula and truncating the noise term to
terms, we obtain the lth component of
by, with
,
where
are generated by the Lubich first-order method, with
,
To solve (
91), we first need to generate
Brownian motions
,
. This can be performed by using MathWorks MATLAB function
fbm1d.m [
29], which gives the value of the fractional Brownian motion with the Hurst parameter
at any fixed time
T. Let
and
and let
denote the reference time step size. Let
be the time partition of
. We generate the fractional Brownian motions
with the Hurst number
by using the MATLAB code in
Appendix A.2. When
,
fbm1d.m generates the standard Brownian motions.
Since we do not know the exact solution of the system, we shall use the reference time step size and the space step size to calculate the reference solution . The spacial discretization is based on the linear finite element method.
We then choose and consider the different time step size to obtain the approximate solutions at .
Let us discuss how to calculate the lth component of
in MATLAB. Denote
and
The lth component of the vector
satisfies
Finally, we shall consider how to calculate the
projections
and
of
and
, respectively. Here, we only consider the case
. The calculation of
is similar. Assume that
By the definition of
, we obtain
Hence,
can be calculated by
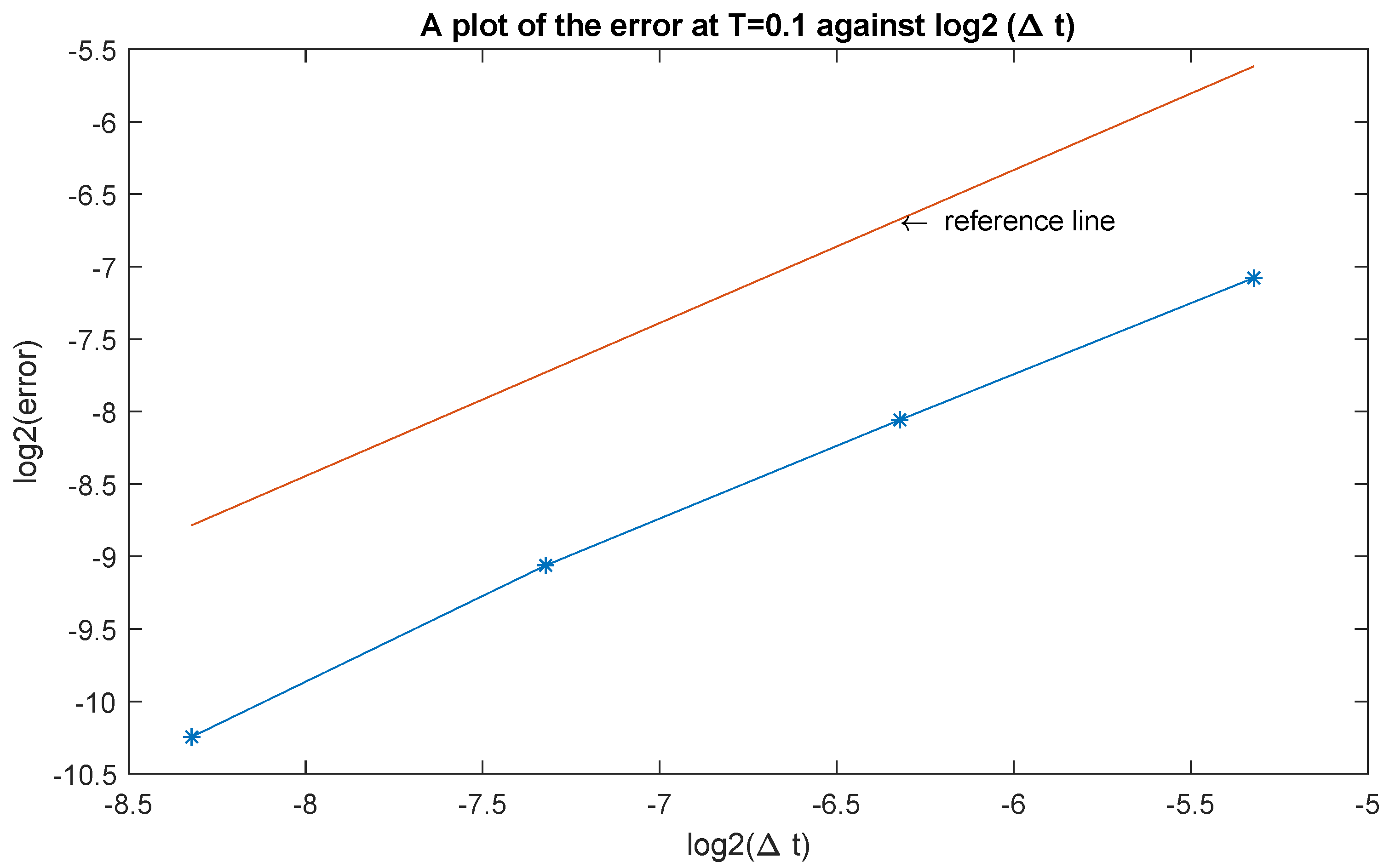
Example 1. Consider the following stochastic time fractional PDE (Partial Differential Equation), with ,where and the initial value and is defined by (78). Let and transform the system (93)–(95) of u into the system of v. We shall consider the approximation of v at . We choose the space step size and the time step size to obtain the reference solution vref. To observe the time convergence orders, we consider the different time step sizes with to obtain the approximate solution V. We choose simulations to calculate the following L2 error at with the different time step sizes By Theorem 8, the convergence order should be In Table 1, we consider the case of trace class noise, where for . We observe that the experimentally determined time convergence orders are consistent with our theoretical convergence orders, as indicated in the numbers in the brackets. We have included the CPU time in seconds for running 20 simulations in each experiment. The CPU times exhibit similarity across the other tables; hence, we have decided not to include them in subsequent tables. In Table 2, we consider the case of white noise, where for . We observe that the experimentally determined time convergence orders are slightly lower than the orders in the trace class noise case, as we expected. In Figure 1, we plot the experimentally determined orders of convergence with and as shown in Table 1 for the trace class noise. The expected convergence order is . To get the plot, we choose the different time step sizes and calculate the corresponding errors . By error estimate we have with the convergence order which implies that The reference line in Figure 1 is determined by four points and the blue line in Figure 1 is determined by the four points . If these two lines are parallel, then we may conclude that the experimentally determined convergence order is almost p. We use the similar approach to obtain other figures below. In Figure 2, we plot the experimentally determined orders of convergence with and as shown in Table 2 for the white noise. We observe that the convergence order is almost in the figure, where the reference line represents the order . Example 2. Consider the following stochastic time fractional PDE, with ,where and the initial values and is defined by (78). We use the same notations as in Example 1. In Table 3, we consider the case of trace class noise, where for . We observe that the experimentally determined time convergence orders are consistent with our theoretical convergence orders, as indicated in the numbers in the brackets. In Table 4, we consider the case of white noise, where for . We observe that the experimentally determined time convergence orders are slightly lower than the orders in the trace class noise case, as expected. In Figure 3, we plot the experimentally determined orders of convergence with and for the trace class noise as shown in Table 3. The expected convergence order is . The reference line in the figure represents the order , which is consistent with our observations. In Figure 4, we plot the experimentally determined orders of convergence with and as shown in Table 4 for the white noise. We observe that the convergence order is almost in the figure, where the reference line represents the order . Example 3. Consider the following stochastic time fractional PDE, with ,where and the initial values and are defined by (78). We use the same notations as in Example 1. In Table 5, we consider the trace class noise, i.e., , and observe that the experimentally determined time convergence orders are consistent with our theoretical convergence orders. The numbers in the brackets denote the theoretical convergence orders. In Table 6, we consider the white noise, i.e., , and observe that the experimentally determined time convergence orders are slightly less than the orders in the trace class noise case, as expected. In Figure 5, we plot the experimentally determined orders of convergence with and in Table 5 for the trace class noise. The expected convergence order is . We indeed observe this in the figure where the reference line is for the order . In Figure 6, we plot the experimentally determined orders of convergence with and in Table 6 for the white noise. We observe that the convergence order is almost in the figure where the reference line is for the order . 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}