
Calibration of a Digital Current Transformer Measuring Bridge: Metrological Challenges and Uncertainty Contributions †


Abstract
:1. Introduction
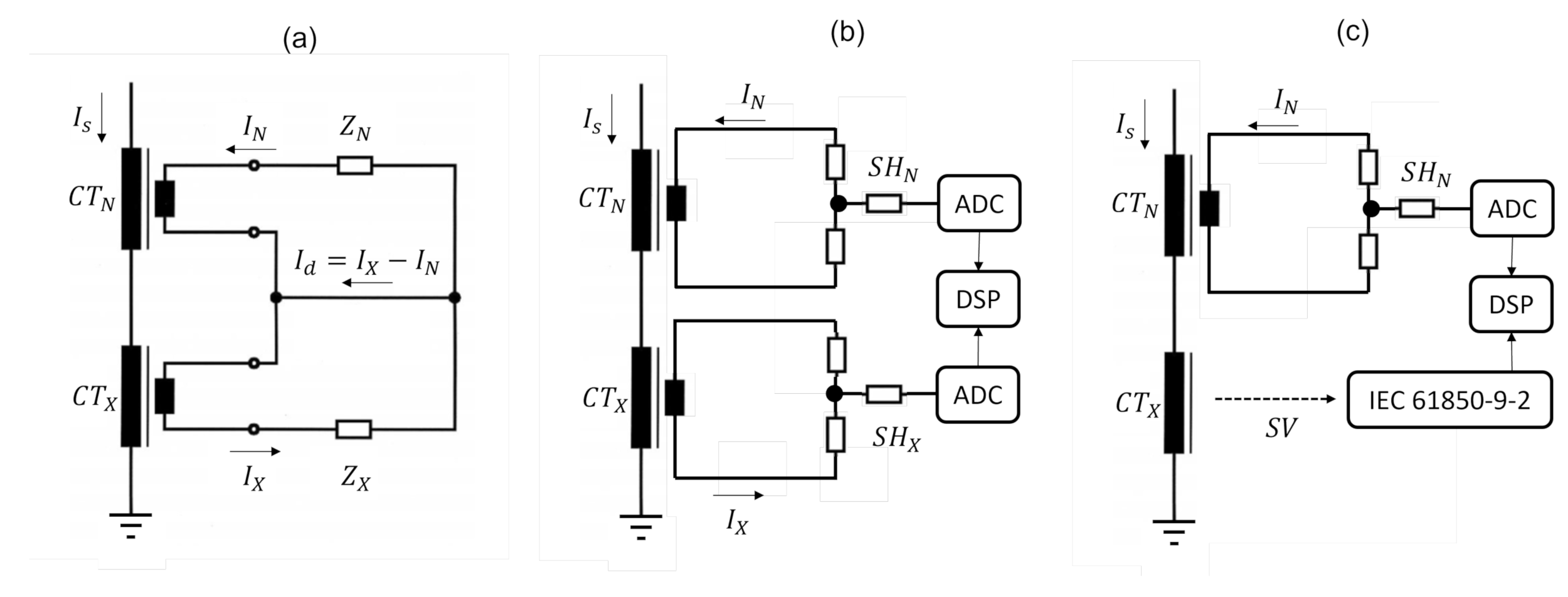
2. Measuring Bridge: Configurations and Measurement Principles
3. Measurement Setup
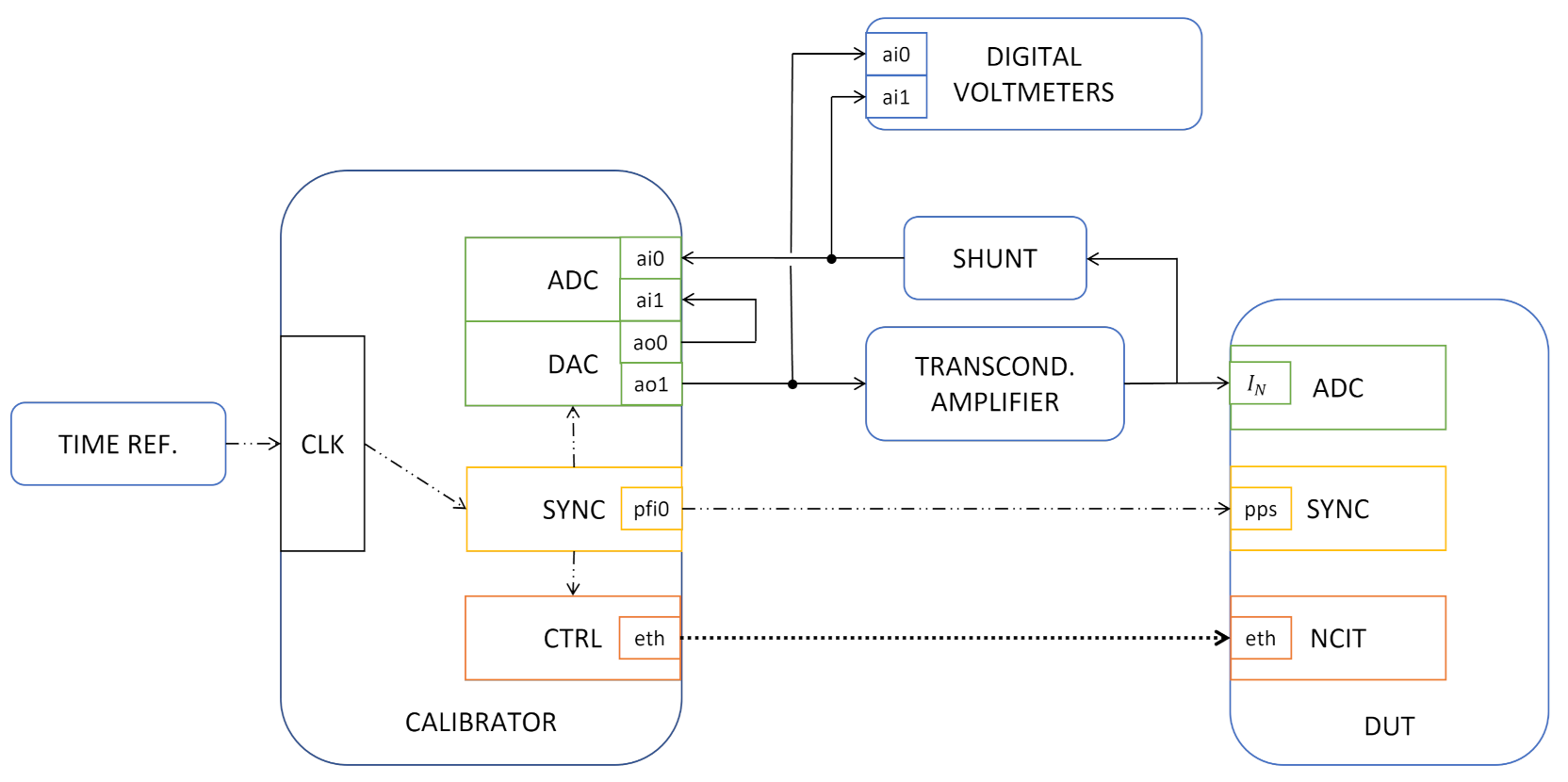
- A digital acquisition unit with a Digital-to-Analog Converter (DAC) and an ADC that operate in simultaneous mode, i.e., share the same time-base and sampling rate. The DAC is responsible for generating the analog test waveform to be supplied at the transconductance amplifier and then the DUT, whereas the ADC simultaneously re-acquires the same waveform to make it available for further processing and defining the actual reference values. In this context, it should be noticed that both DAC and ADC are typically equipped with two channels. One pair of channels (ai0 and ao1 in Figure 2) is dedicated to the test waveform generation and re-acquisition, whereas the other one (ai1 and ao0) is intended for self-calibration tasks, namely for the definition of the DAC phase offset [18], as further discussed in the following section;
- A synchronization unit locked to the internal clock, and thus to the external time reference. The synchronization board is responsible for two main tasks: distributing the triggers for the other units within the calibrator, and providing the measuring bridge with a Pulse-Per-Second (PPS) signal that is aligned with the time-stamp of the SV data packets. As regards the first task, the main difficulty is represented by the necessity of simultaneously triggering a purely hardware unit, namely the DAQ, and a purely software process, namely the SV transmission. To this end, software defined triggers are programmed as future time events, i.e., in correspondence of the first rising edge of the internal time base after a given time instant. As regards the second task, instead, the PPS is generated as a Transistor-Transistor Logic (TTL) signal, disciplined at the same rising edge as the software triggers;
- A controller unit with sufficient memory and processing capabilities, and an Ethernet board. On one side, the controller supervises the DAQ unit: it defines the test waveform to be generated as a sample series at the given sampling rate, stores the acquired samples, and processes them in order to estimate (in quasi real-time) the DAC phase offset. On the other side, the controller is responsible for publishing the SV data packets, from the encapsulation of the SV to the actual transmission through a dedicated Ethernet board.
METAS Implementation
- Time reference: A Meinberg LANTIME M600Time Server (Meinberg Funkuhren, Bad Pyrmont, Germany) that includes a GPS-disciplined 10-MHz clock, whose time accuracy and frequency stability are in the order of 50 ns and 0.5 nHz/Hz over an averaging time of 1800 s, respectively [17].
- Calibrator: An NI PXIe 1062 chassis (National Instruments, Austin, TX, USA) that hosts three boards: the NI PXIe 8880 controller, the NI PXI 6683 timing and synchronization module, and the NI PXI 4461 dynamic signal acquisition module. The NI PXIe 8880 is an Intel Xeon embedded controller (2.3 GHz Eight-Core) with two 10/100/1000BASE-TX (Gigabit) Ethernet ports. The NI PXI 6683 can generate events and clock signals at specified synchronized future times and timestamp input events with the synchronized system time. The NI PXI 4461 is a 2-input/2-output DAQ with a nominal resolution of 24 bits. The sampling rate and the vertical range are set equal to 192 kHz and ±2 V, respectively, for both DAC and ADC channels.
- Transconductance amplifier: A Clarke-Hess 8100 (Clarke-Hess, Medford, NY, USA) characterized by a 50 ppm short-term stability, a maximum compliance voltage of 7 V, a total harmonic distortion lower than −60 dB up to 10 kHz, and six available output range from 200 mA to 100 A.
- Shunt: A set of Fluke A40B Precision DC and AC Current Shunts (Fluke, Norwich, UK) with a worst-case uncertainty of 55 ppm up to 1 kHz signal frequency. In particular, we adapted the shunt input range to the generated current level: a 500-mA shunt for mA, and a 10-A shunt for A. In this sense, a further improvement might be represented by the adoption of magnetoresistance sensors. Nevertheless, it should be noticed that the shunts are periodically calibrated and thus the non-ideal conversion ratio is suitably compensated, and its effect is negligible if compared to the calibrator and amplifier ones.
- Digital Voltmeters: A pair of Keysight 3458A Multimeters (Keysight Technologies, Santa Rosa, CA, USA) with a resolution of 8.5 digits and an accuracy of 100 ppm in synchronous mode. The DVMs are used as digitizers for a sine fitting technique with a sampling rate of 2.5 kHz and an aperture time of 920 s. The two digitizers operate in a master–slave configuration: the one connected to the calibrator output triggers also the acquisition of the one connected to the amplifier output. In this way, they mimic a two-channel ADC operating in synchronous sampling mode, as further discussed in [23]. It is also worth noticing that the sine fitting procedure returns the value of the amplitude, frequency and initial phase of the fundamental component. Therefore, by comparing the phase at the two channels, we can retrieve the phase contribution of the amplifier only with a standard uncertainty of 0.03 rad [24].
- Measuring bridge (DUT): A ZERA WM3000I (ZERA, Konigswinter, Germany) with a current input range from 1 mA to 15 A. In non-conventional mode, the bridge guarantees a ratio and phase uncertainty not larger than 300 ppm and 1.5 min, respectively.
4. Uncertainty Contributions
5. Experimental Validation
6. Conclusions
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Terzija, V.; Valverde, G.; Cai, D.; Regulski, P.; Madani, V.; Fitch, J.; Skok, S.; Begovic, M.M.; Phadke, A. Wide-Area Monitoring, Protection, and Control of Future Electric Power Networks. Proc. IEEE 2011, 99, 80–93. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Yang, Y.; Yang, D.; Wang, X. Distributed Power-Generation Systems and Protection. Proc. IEEE 2017, 105, 1311–1331. [Google Scholar] [CrossRef] [Green Version]
- Paolone, M.; Gaunt, T.; Guillaud, X.; Liserre, M.; Meliopoulos, S.; Monti, A.; Van Cutsem, T.; Vittal, V.; Vournas, C. Fundamentals of power systems modelling in the presence of converter-interfaced generation. Electr. Power Syst. Res. 2020, 189, 106811. [Google Scholar] [CrossRef]
- Frigo, G.; Pegoraro, P.; Toscani, S. Low-Latency, Three-Phase PMU Algorithms: Review and Performance Comparison. Appl. Sci. 2021, 11, 2261. [Google Scholar] [CrossRef]
- Frigo, G.; Derviškadić, A.; Zuo, Y.; Paolone, M. PMU-Based ROCOF Measurements: Uncertainty Limits and Metrological Significance in Power System Applications. IEEE Trans. Instrum. Meas. 2019, 68, 3810–3822. [Google Scholar] [CrossRef] [Green Version]
- Karpilow, A.C.; Derviskadic, A.; Frigo, G.; Paolone, M. Characterization of Non-Stationary Signals in Electric Grids: A Functional Dictionary Approach. IEEE Trans. Power Syst. 2021, 37, 1–13. [Google Scholar] [CrossRef]
- Rietveld, G.; Wright, P.S.; Roscoe, A.J. Reliable Rate-of-Change-of-Frequency Measurements: Use Cases and Test Conditions. IEEE Trans. Instrum. Meas. 2020, 69, 6657–6666. [Google Scholar] [CrossRef]
- Ingram, D.M.E.; Schaub, P.; Campbell, D.A. Use of Precision Time Protocol to Synchronize Sampled-Value Process Buses. IEEE Trans. Instrum. Meas. 2012, 61, 1173–1180. [Google Scholar] [CrossRef] [Green Version]
- IEEE/IEC International Standard-Instrument transformers-Part 9: Digital interface for instrument transformers. In IEC/IEEE 61869-9:2016; IEC: Geneva, Switzerlad, 2016; pp. 1–127. [CrossRef]
- Mohns, E.; Mortara, A.; Cayci, H.; Houtzager, E.; Fricke, S.; Agustoni, M.; Ayhan, B. Calibration of Commercial Test Sets for Non-Conventional Instrument Transformers. In Proceedings of the 2017 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Liverpool, UK, 20–22 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- IEC/IEEE International Standard-Communication networks and systems for power utility automation—Part 9-2: Specific Communication Service Mapping (SCSM) Sampledvalues over ISO/IEC 8802-3. In IEC 61850-9-2:2011+AMD1:2020 CSV Consolidated Version 2020-02; IEC: Geneva, Switzerlad, 2011; pp. 1–18. [CrossRef]
- Castello, P.; Ferrari, P.; Flammini, A.; Muscas, C.; Rinaldi, S. An IEC 61850-Compliant distributed PMU for electrical substations. In Proceedings of the 2012 IEEE International Workshop on Applied Measurements for Power Systems (AMPS) Proceedings, Aachen, Germany, 26–28 September 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Giustina, D.D.; Dedè, A.; Invernizzi, G.; Valle, D.P.; Franzoni, F.; Pegoiani, A.; Cremaschini, L. Smart Grid Automation Based on IEC 61850: An Experimental Characterization. IEEE Trans. Instrum. Meas. 2015, 64, 2055–2063. [Google Scholar] [CrossRef]
- Blair, S.M.; Roscoe, A.J.; Irvine, J. Real-time compression of IEC 61869-9 sampled value data. In Proceedings of the 2016 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 28–30 September 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Frigo, G.; Agustoni, M. Phasor Measurement Unit and Sampled Values: Measurement and Implementation Challenges. In Proceedings of the 2021 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Cagliari, Italy, 29 September–1 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Kariyawasam, S.; Rajapakse, A.D.; Perera, N. Investigation of Using IEC 61850-Sampled Values for Implementing a Transient-Based Protection Scheme for Series-Compensated Transmission Lines. IEEE Trans. Power Deliv. 2018, 33, 93–101. [Google Scholar] [CrossRef]
- Agustoni, M.; Mortara, A. A Calibration Setup for IEC 61850-9-2 Devices. IEEE Trans. Instrum. Meas. 2017, 66, 1124–1130. [Google Scholar] [CrossRef]
- Agustoni, M.; Frigo, G. Characterization of DAC Phase Offset in IEC 61850-9-2 Calibration Systems. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Djokić, B.; Parks, H. A Synchronized Current-Comparator Bridge for the Calibration of Analog Merging Units. IEEE Trans. Instrum. Meas. 2019, 68, 1955–1960. [Google Scholar] [CrossRef]
- Roccato, P.; Sardi, A.; Pasini, G.; Peretto, L.; Tinarelli, R. Traceability of MV low power instrument transformer LPIT. In Proceedings of the 2013 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 25–27 September 2013; pp. 13–18. [Google Scholar] [CrossRef]
- Thomas, R.; Vujanic, A.; Xu, D.Z.; Sjödin, J.E.; Salazar, H.R.M.; Yang, M.; Powers, N. Non-conventional instrument transformers enabling digital substations for future grid. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition (T D), Dallas, TX, USA, 3–5 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Souders, T.M. A Wide Range Current Comparator System for Calibrating Current Transformers. IEEE Trans. Power Appar. Syst. 1971, PAS-90, 318–324. [Google Scholar] [CrossRef]
- Mester, C. Timestamping Type 3458A Multimeter Samples. In Proceedings of the 2018 Conference on Precision Electromagnetic Measurements (CPEM 2018), Paris, France, 8–13 July 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Mester, C. Sampling Primary Power Standard from DC up to 9 kHz Using Commercial Off-The-Shelf Components. Energies 2021, 14, 2203. [Google Scholar] [CrossRef]
- Overney, F.; Rufenacht, A.; Braun, J.P.; Jeanneret, B.; Wright, P.S. Characterization of Metrological Grade Analog-to-Digital Converters Using a Programmable Josephson Voltage Standard. IEEE Trans. Instrum. Meas. 2011, 60, 2172–2177. [Google Scholar] [CrossRef]
- Braun, J.P. Measure of the Absolute Phase Angle of a Power Frequency Sinewave with Respect to UTC. In Proceedings of the 2018 Conference on Precision Electromagnetic Measurements (CPEM 2018), Paris, France, 8–13 July 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Crotti, G.; Femine, A.D.; Gallo, D.; Giordano, D.; Landi, C.; Luiso, M. Measurement of Absolute Phase Error of Digitizers. In Proceedings of the 2018 Conference on Precision Electromagnetic Measurements (CPEM 2018), Paris, France, 8–13 July 2018; pp. 1–2. [Google Scholar] [CrossRef] [Green Version]
- Goldstein, A.; Frigo, G. Determination of Digitizer Absolute Phase Using Equivalent Time Sampling; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Budovsky, I. Measurement of Phase Angle Errors of Precision Current Shunts in the Frequency Range From 40 Hz to 200 kHz. IEEE Trans. Instrum. Meas. 2007, 56, 284–288. [Google Scholar] [CrossRef]
- Bosco, G.C.; Garcocz, M.; Lind, K.; Pogliano, U.; Rietveld, G.; Tarasso, V.; Voljc, B.; Zachovalová, V.N. Phase Comparison of High-Current Shunts up to 100 kHz. IEEE Trans. Instrum. Meas. 2011, 60, 2359–2365. [Google Scholar] [CrossRef]
- Betta, G.; Liguori, C.; Pietrosanto, A. Propagation of uncertainty in a discrete Fourier transform algorithm. Measurement 2000, 27, 231–239. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amplitude Uncertainty | Phase Uncertainty | |
|---|---|---|
| (ppm) | () | |
| Synchronization module | − | 0.012 |
| DAQ module | 25.12 | 0.007 |
| Transconductance amplifier | 160.75 | 0.687 |
| Combined Uncertainty | 162.70 | 0.687 |
| Measurement | Accuracy | Current Range |
|---|---|---|
| , Normal current RMS | 100 ppm | A |
| 200 ppm | A | |
| , Ratio error | 100 ppm | A |
| 200 ppm | A | |
| , Phase displacement | 1.1 | A |
| 1.5 | A |
| Settings | Measurements | Uncertainty | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (A) | (A) | (%) | (%) | () | (%) | (%) | () | (%) | (%) | () |
| 5 | 5 | 100 | −5.000 | 0.00 | 0.00 | −0.003 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | −3.000 | 0.00 | 0.00 | −0.004 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | −0.200 | 0.00 | 0.00 | −0.004 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | −0.200 | −10.00 | 0.01 | −0.006 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | −0.200 | 10.00 | 0.01 | −0.006 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | −5400.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | −180.00 | 0.01 | −0.004 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | −1.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | 0.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | 1.00 | 0.01 | −0.006 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | 180.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | 5400.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | 10,794.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.200 | 0.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.200 | −10.00 | 0.01 | −0.005 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.200 | 10.00 | 0.01 | −0.006 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 3.000 | 0.00 | 0.01 | −0.004 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 5.000 | 0.00 | 0.01 | −0.005 | −0.8 | 0.02 | 0.012 | 1.0 |
| Settings | Measurements | Uncertainty | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (A) | (A) | (%) | (%) | () | (%) | (%) | () | (%) | (%) | () |
| 5 | 5 | 1 | 0.000 | 0.00 | 0.00 | −0.017 | −1.1 | 0.02 | 0.028 | 2.0 |
| 5 | 5 | 2 | 0.000 | 0.00 | 0.00 | 0.013 | −1.0 | 0.02 | 0.017 | 1.5 |
| 5 | 5 | 5 | 0.000 | 0.00 | 0.00 | −0.009 | −1.0 | 0.02 | 0.013 | 1.0 |
| 5 | 5 | 10 | 0.000 | 0.00 | 0.00 | −0.007 | −1.1 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 20 | 0.000 | 0.00 | 0.00 | −0.009 | −1.0 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 50 | 0.000 | 0.00 | 0.00 | −0.006 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 100 | 0.000 | 0.00 | 0.01 | −0.004 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 120 | 0.000 | 0.00 | 0.01 | −0.004 | −0.9 | 0.02 | 0.012 | 1.0 |
| 5 | 5 | 200 | 0.000 | 0.00 | 0.01 | −0.001 | −1.0 | 0.02 | 0.012 | 1.0 |
| Settings | Measurements | Uncertainty | |||||
|---|---|---|---|---|---|---|---|
| (A) | (A) | (%) | (%) | () | (Hz) | (mHz) | (mHz) |
| 5 | 5 | 1 | 0.000 | 0.00 | 50 | −0.511 | 0.056 |
| 5 | 5 | 2 | 0.000 | 0.00 | 50 | −0.512 | 0.038 |
| 5 | 5 | 5 | 0.000 | 0.00 | 50 | −0.556 | 0.028 |
| 5 | 5 | 10 | 0.000 | 0.00 | 50 | −0.519 | 0.030 |
| 5 | 5 | 20 | 0.000 | 0.00 | 50 | −0.537 | 0.031 |
| 5 | 5 | 50 | 0.000 | 0.00 | 50 | −0.537 | 0.032 |
| 5 | 5 | 100 | 0.000 | 0.00 | 50 | −0.509 | 0.028 |
| 5 | 5 | 100 | 0.000 | −5400.00 | 50 | −0.529 | 0.032 |
| 5 | 5 | 100 | 0.000 | −180.00 | 50 | −0.557 | 0.028 |
| 5 | 5 | 100 | 0.000 | −1.00 | 50 | −0.521 | 0.030 |
| 5 | 5 | 100 | 0.000 | 0.00 | 50 | −0.530 | 0.032 |
| 5 | 5 | 100 | 0.000 | 1.00 | 50 | −0.530 | 0.032 |
| 5 | 5 | 100 | 0.000 | 180.00 | 50 | −0.548 | 0.030 |
| 5 | 5 | 100 | 0.000 | 5400.00 | 50 | −0.548 | 0.032 |
| 5 | 5 | 100 | 0.000 | 10,794.00 | 50 | −0.548 | 0.030 |
| 5 | 5 | 120 | 0.000 | 0.00 | 50 | −0.528 | 0.032 |
| 5 | 5 | 200 | 0.000 | 0.00 | 50 | −0.511 | 0.028 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frigo, G.; Agustoni, M. Calibration of a Digital Current Transformer Measuring Bridge: Metrological Challenges and Uncertainty Contributions. Metrology 2021, 1, 93-106. https://doi.org/10.3390/metrology1020007
Frigo G, Agustoni M. Calibration of a Digital Current Transformer Measuring Bridge: Metrological Challenges and Uncertainty Contributions. Metrology. 2021; 1(2):93-106. https://doi.org/10.3390/metrology1020007
Chicago/Turabian StyleFrigo, Guglielmo, and Marco Agustoni. 2021. "Calibration of a Digital Current Transformer Measuring Bridge: Metrological Challenges and Uncertainty Contributions" Metrology 1, no. 2: 93-106. https://doi.org/10.3390/metrology1020007