
Battery State-of-Health Evaluation for Roadside Energy Storage Systems in Electric Transportation
 ,
,
Abstract
:1. Introduction
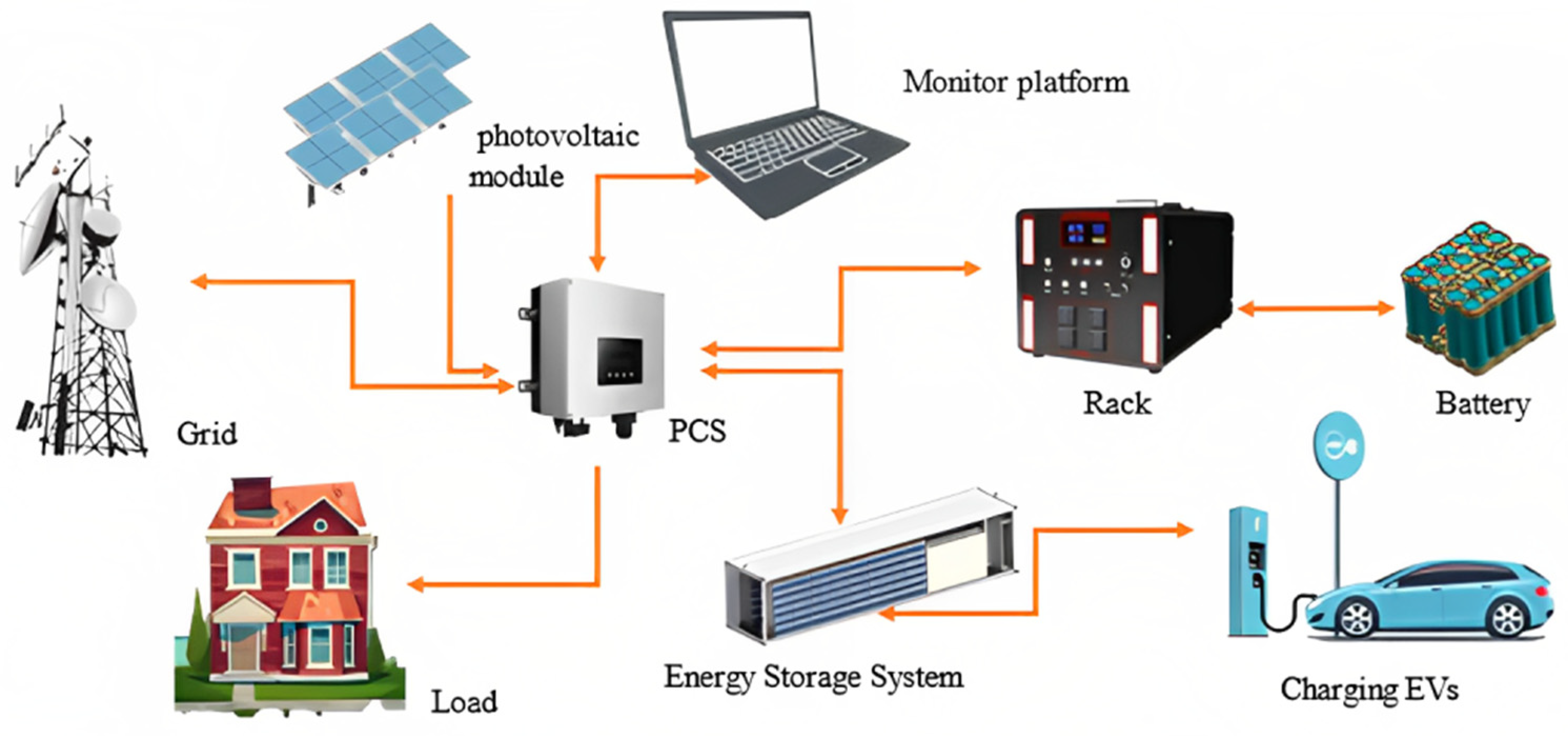
2. Case Study of a Roadside Energy Storage System
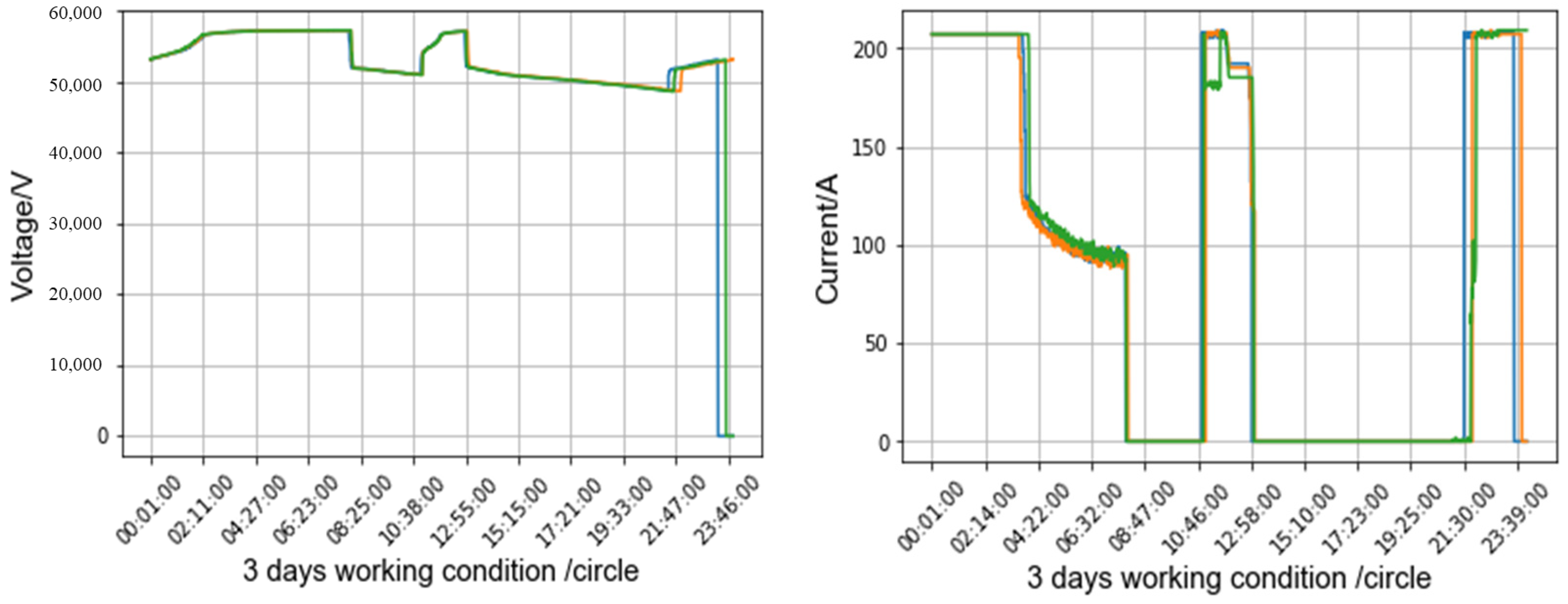
2.1. Data Collection
2.2. Data Screening
2.3. Data Processing
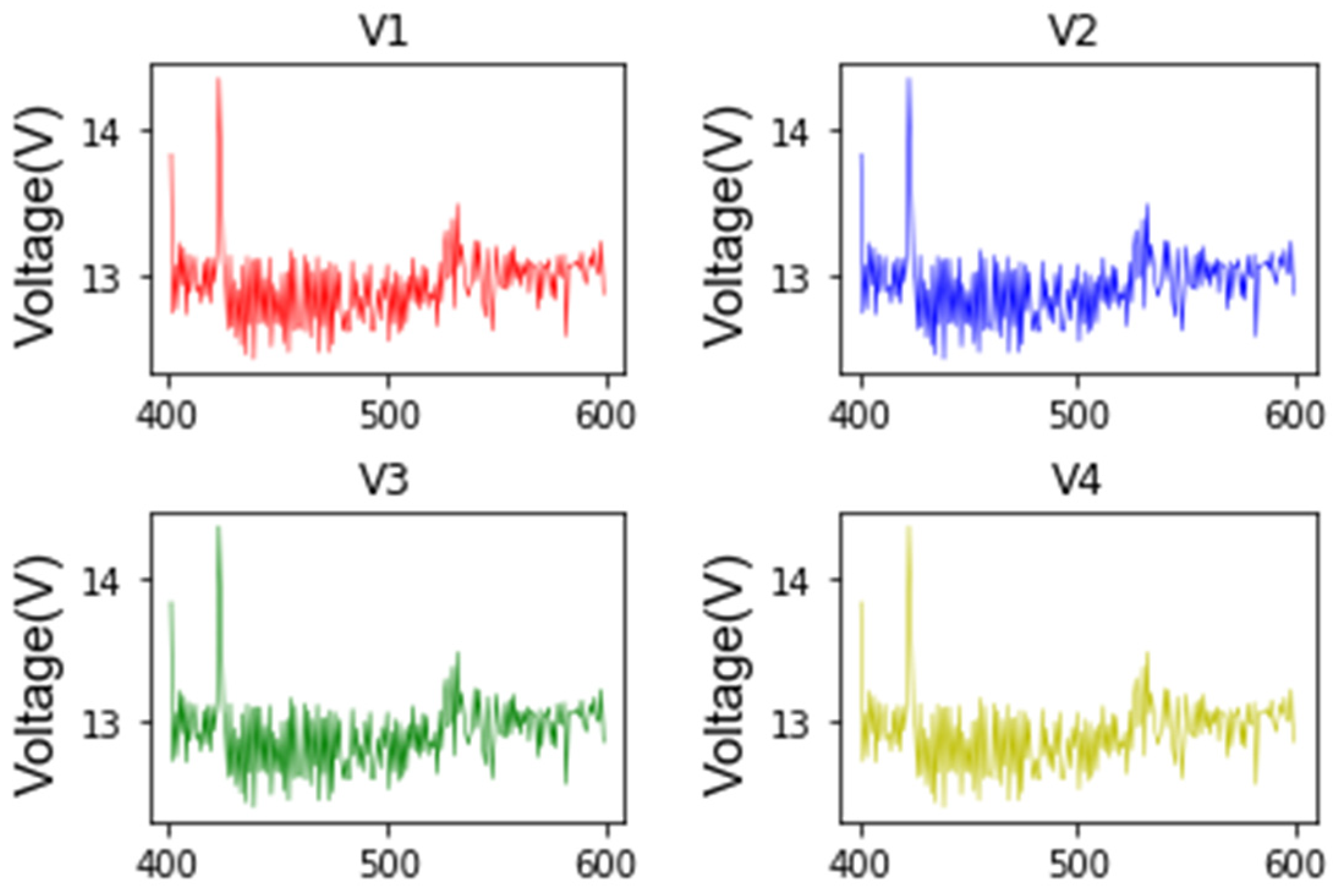
2.3.1. Battery-Pack Consistency Assessment
2.3.2. Internal Resistance Balance
2.3.3. The Temperature Balance
2.3.4. The Battery-Cell Balance
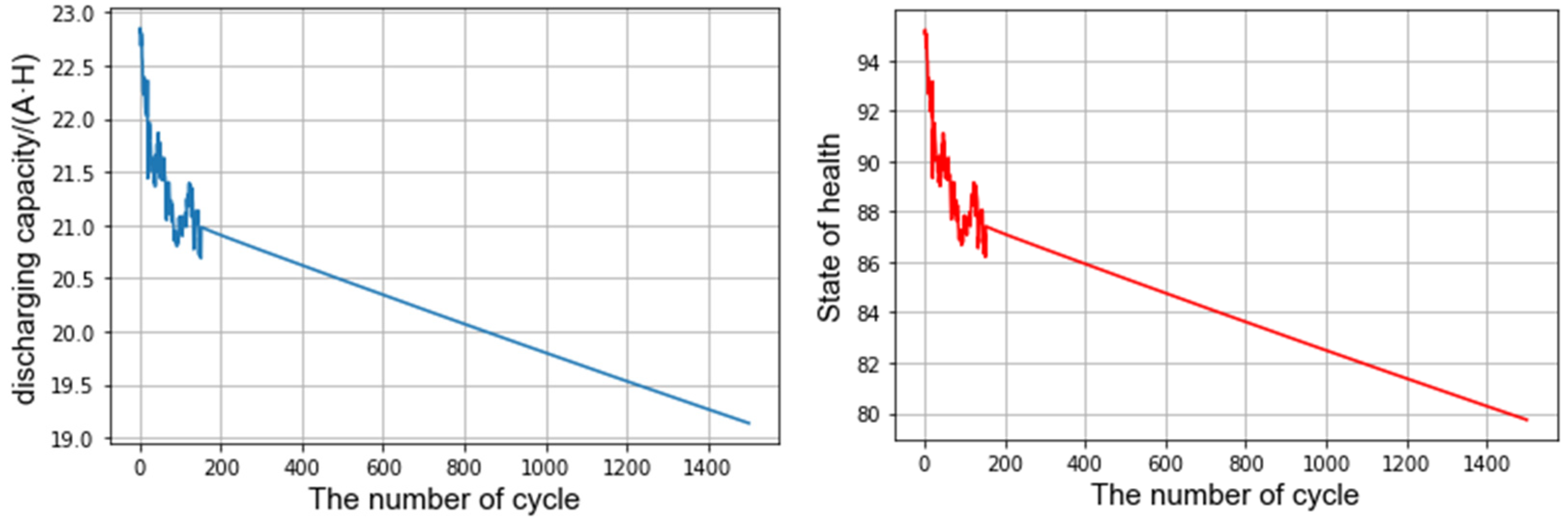
2.4. SOH Calculation
3. State-of-Health Evaluation
3.1. Health State Segmentation
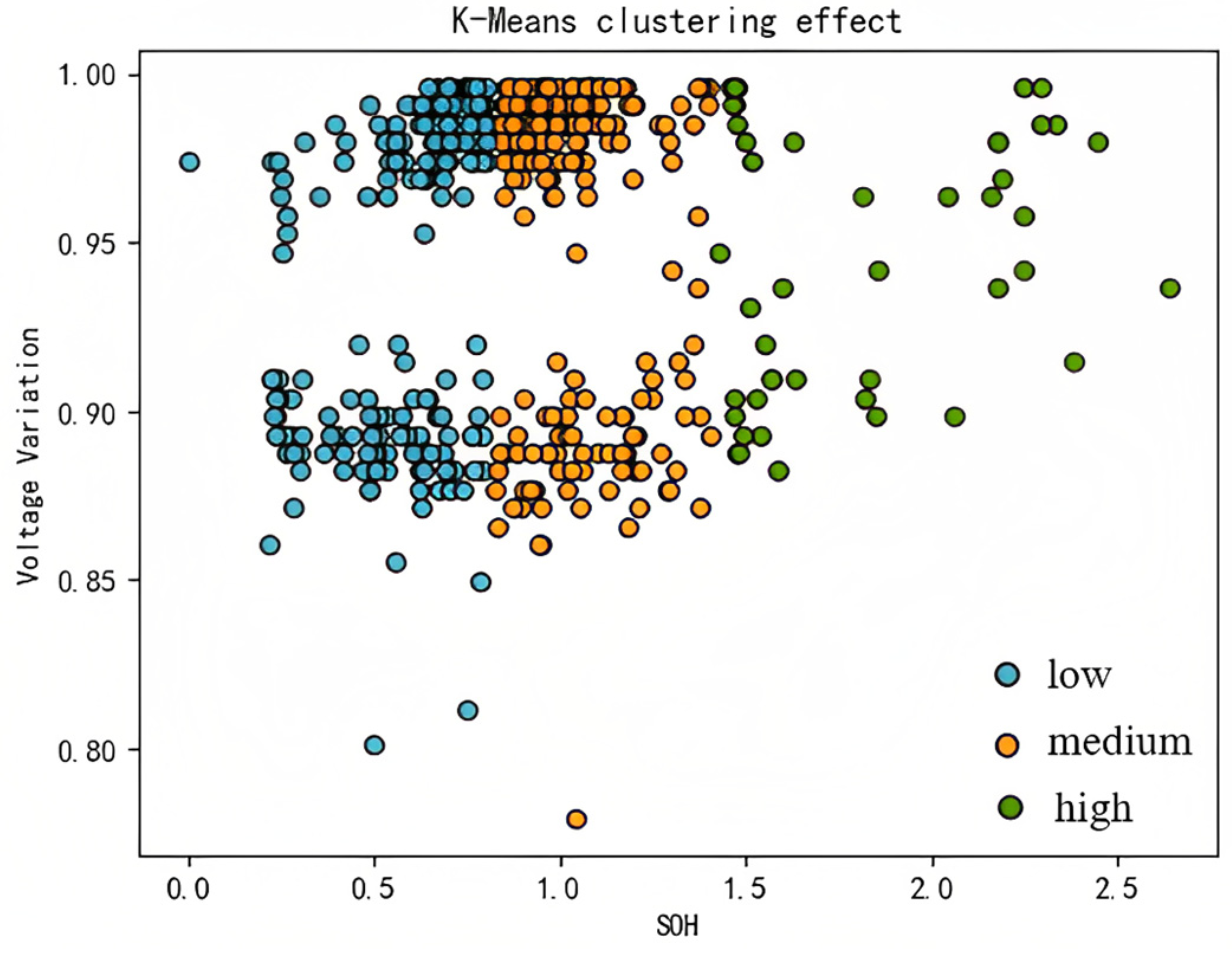
3.1.1. K-Means Algorithm
- (1)
- For all n objects, randomly select k objects as the center of a class, representing the k classes to be generated;
- (2)
- Calculate the distance from other objects to the cluster center, and assign objects to the nearest cluster;
- (3)
- Calculate the average value of all objects for each class as the new central value of all objects;
- (4)
- Reassign data according to the principle of nearest distance;
- (5)
- Return to (3) until there is no change and end the clustering.
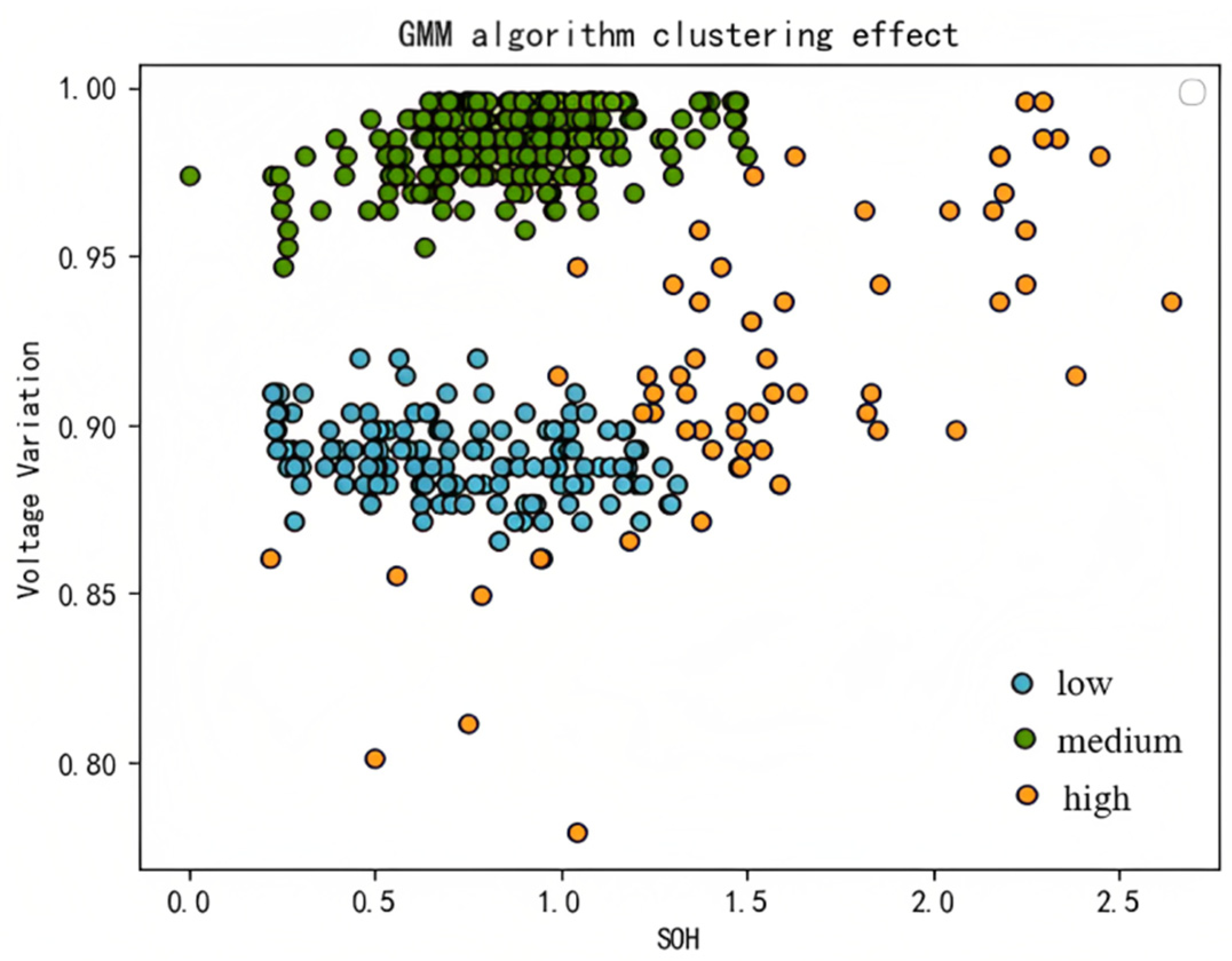
3.1.2. Gaussian Mixture Model
- (1)
- Judge whether a model fits well by observing the proximity between the sampling probability value and the model probability value;
- (2)
- Calculate the expected value of the data through the model and update the mean and standard deviation (parameters) of the distribution, i.e., and ;
- (3)
- Repeat the process many times until the two probability values are very close;
- (4)
- Stop updating and complete model training.
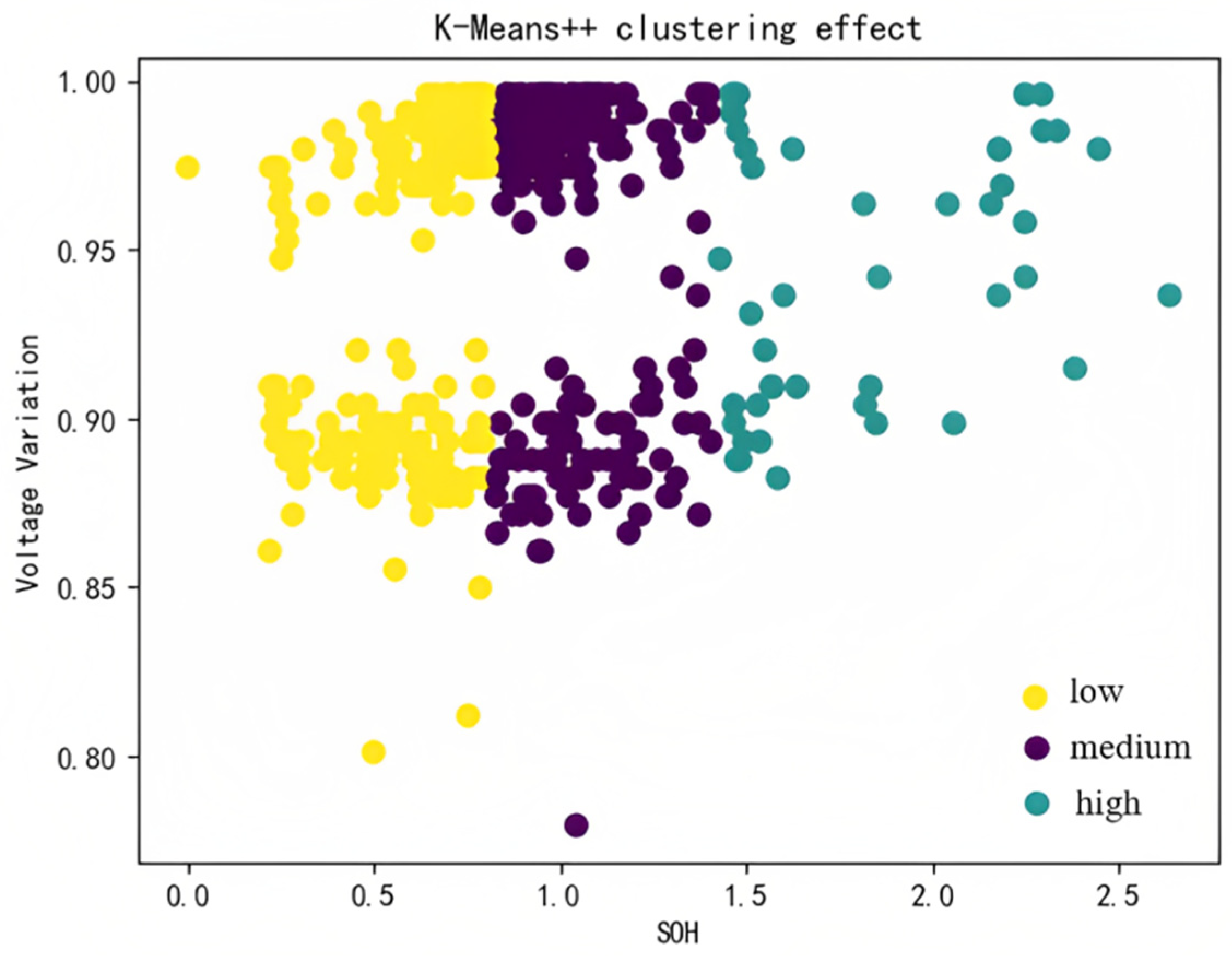
3.1.3. K-Means++ Algorithm
- (1)
- Select a point randomly from the set of input data points as the first cluster center;
- (2)
- For each point x in the data set, calculate the distance D(x) from the nearest cluster center (the selected cluster center);
- (3)
- Select a new data point as the new cluster center. The selection criterion is the point with larger D(x) has a higher probability of being selected as the cluster center;
- (4)
- Repeat steps 2 and 3 until k cluster centers are selected.
3.2. Results and Performance of the Methods
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hernandez, J.E.; Kreikebaum, F.; Divan, D. Flexible electric vehicle (EV) charging to meet renewable portfolio standard (RPS) mandates and minimize green house Gas emissions. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 4270–4277. [Google Scholar] [CrossRef]
- Xu, M.; Yang, H.; Wang, S. Mitigate the range anxiety: Siting battery charging stations for electric vehicle drivers. Transp. Res. Part C Emerg. Technol. 2020, 114, 164–188. [Google Scholar] [CrossRef]
- Bonges, H.A., III; Lusk, A.C. Addressing electric vehicle (EV) sales and range anxiety through parking layout, policy and regulation. Transp. Res. Part A Policy Pract. 2016, 83, 63–73. [Google Scholar] [CrossRef]
- Mohamad, F.; Teh, J.; Lai, C.-M. Optimum allocation of battery energy storage systems for power grid enhanced with solar energy. Energy 2021, 223, 120105. [Google Scholar] [CrossRef]
- Ordóñez, G.; Osma, G.; Vergara, P.P.; Rey, J.M. Wind and Solar Energy Potential Assessment for Development of Renewables Energies Applications in Bucaramanga, Colombia. IOP Conf. Ser. Mater. Sci. Eng. 2014, 59, 012004. [Google Scholar] [CrossRef]
- Manzo, M.A.; Miller, T.B.; Hoberecht, M.A.; Baumann, E.D. Energy Storage: Batteries and Fuel Cells for Exploration. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007. [Google Scholar]
- Xia, Z.; Li, Y.; Chen, R.; Sengupta, D.; Guo, X.; Xiong, B.; Niu, Y. Mapping the rapid development of photovoltaic power stations in northwestern China using remote sensing. Energy Rep. 2022, 8, 4117–4127. [Google Scholar] [CrossRef]
- Cowell, R. The role of place in energy transitions: Siting gas-fired power stations and the reproduction of high-carbon energy systems. Geoforum 2020, 112, 73–84. [Google Scholar] [CrossRef]
- Chen, H.; Cong, T.N.; Yang, W.; Tan, C.; Li, Y.; Ding, Y. Progress in electrical energy storage system: A critical review. Prog. Nat. Sci. Mater. Int. 2009, 19, 291–312. [Google Scholar] [CrossRef]
- Cacciato, M.; Nobile, G.; Scarcella, G.; Scelba, G. Real-Time Model-Based Estimation of SOC and SOH for Energy Storage Systems. IEEE Trans. Power Electron. 2017, 32, 794–803. [Google Scholar] [CrossRef]
- Tanujit, B.; Asokan, S. Electrochemical Impedance spectroscopy study of AgI-Ag2O-MoO3 Glasses: Understanding the Diffusion, Relaxation, Fragility and Power Law Behavior. Philos. Mag. 2019, 101, 400–419. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster-Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Gurajala, R.; Choppala, P.B.; Meka, J.S.; Teal, P.D. Derivation of the Kalman filter in a Bayesian filtering perspective. In Proceedings of the 2021 2nd International Conference on Range Technology (ICORT), Balasore, India, 5–6 August 2021. [Google Scholar]
- Zhao, J.; Jia, H.; Zhan, Y.; Xiang, Z.; Zheng, S.; Bi, K. Combination of LS-SVM algorithm and JC method for fragility analysis of deep-water high piers subjected to near-field ground motions. Structures 2020, 24, 282–295. [Google Scholar] [CrossRef]
- Sun, H.; Sun, J.; Zhao, K.; Wang, L.; Wang, K. Data-Driven ICA-Bi-LSTM-Combined Lithium Battery SOH Estimation. Math. Probl. Eng. 2022, 2022, 9645892. [Google Scholar] [CrossRef]
- Ahmed, M.; Seraj, R.; Islam, S.M.S. The k-means algorithm: A comprehensive survey and performance evaluation. Electronics 2020, 9, 1295. [Google Scholar] [CrossRef]
- Zong, B.; Song, Q.; Min, M.R.; Cheng, W.; Lumezanu, C.; Cho, D.-K.; Chen, H. Deep Autoencoding Gaussian Mixture Model for Unsupervised Anomaly Detection. In Proceedings of the International Conference on Learning Representations, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Arthur, D.; Vassilvitskii, S. k-means++: The advantages of careful seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–9 January 2007. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Maximum | Minimum | Mean | Std |
|---|---|---|---|---|
| Total operating voltage (V) | 57,268 | 0 | 52,321.73 | 2921.62 |
| Single cell voltage (V) | 15.3 | 0 | 5.2 | 1.35 |
| Single row battery pack voltage (V) | 81.29 | 0 | 25.15 | 28.10 |
| Total voltage (V) | 57,653 | 0 | 32,486.98 | 25,496.05 |
| Mainboard temperature (°C) | 65 | 0 | 43.25 | 5.92 |
| Environment temperature (°C) | 41 | 0 | 31.70 | 4.63 |
| Main battery electricity (mA) | 316 | 0 | 90.44 | 89.73 |
| Legend | Parameter | Interpretation |
|---|---|---|
| Temperature | Max TEnc | The maximum of temperature entropy in the Cth iteration |
| Avg TEnc | The average value of temperature entropy | |
| Var TEnc | The variance of temperature entropy | |
| Avg | The average value of the Cth iteration | |
| Avg | The minimum temperature at Cth iteration | |
| Voltage | Max VEnc1 | The maximum value of the voltage entropy |
| Avg VEnc1 | The average value of the voltage entropy | |
| Var VEnc1 | The variance of the voltage entropy | |
| Max | The maximum value of the voltage difference of the four cells | |
| Avg | The average value of the voltage difference of the four cells | |
| Avg | The maximum value of the voltage of the four cells | |
| Capacity | Varc1,c2 | Variance: Varc1,c2 = Min(Qc2 − Qc1) |
| Resistance | The value of internal resistance |
| Input Parameters | Output Parameter | |||
|---|---|---|---|---|
| Index | Voltage (V) | Resistance (Ω) | Temperature (°C) | State of Health |
| 1 | 10.497 | 0.094 | 30.9 | 95.1 |
| 2 | 10.497 | 0.092 | 31.3 | 95.2 |
| 3 | 10.497 | 0.095 | 31.3 | 95.1 |
| 4 | 10.497 | 0.091 | 31.0 | 95.0 |
| 5 | 10.497 | 0.091 | 31.1 | 94.8 |
| 6 | 10.497 | 0.088 | 31.0 | 94.5 |
| 7 | 10.497 | 0.092 | 31.2 | 94.1 |
| 8 | 10.497 | 0.093 | 31.5 | 93.9 |
| 9 | 10.498 | 0.091 | 30.8 | 93.0 |
| Clustering Algorithms | Advantages | Disadvantages | Silhouette Coefficient |
|---|---|---|---|
| K-Means | Low time complexity; high computing efficiency | Number of clusters needed to be preset; not suitable for nonconvex data | 0.63 |
| Gaussian Mixture Model | each class probability; high computing speed | Inflexible shape; limited accuracy; lack of robustness | 0.80 |
| K-Means++ | Improved K-Means algorithm; improve the final error; reduce the calculation time | Internal orderliness; low scalability; high time complexity | 0.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, K.; Shen, K.; Dong, Z.; Liang, Z.; Zhao, L.; Xu, T.; Yin, S. Battery State-of-Health Evaluation for Roadside Energy Storage Systems in Electric Transportation. Future Transp. 2023, 3, 1310-1325. https://doi.org/10.3390/futuretransp3040072
Deng K, Shen K, Dong Z, Liang Z, Zhao L, Xu T, Yin S. Battery State-of-Health Evaluation for Roadside Energy Storage Systems in Electric Transportation. Future Transportation. 2023; 3(4):1310-1325. https://doi.org/10.3390/futuretransp3040072
Chicago/Turabian StyleDeng, Kailong, Kaiyuan Shen, Zihao Dong, Zekai Liang, Lei Zhao, Ting Xu, and Shunde Yin. 2023. "Battery State-of-Health Evaluation for Roadside Energy Storage Systems in Electric Transportation" Future Transportation 3, no. 4: 1310-1325. https://doi.org/10.3390/futuretransp3040072