2.1. Main Characterisitics
The proposed flexible PM model follows an explicit solution algorithm based on the centred difference method [
22]. The adopted flexible contact interaction is an extension of the rigid contact model proposed in [
14], which takes into account, in an approximate way, the grain polygonal shape. Similar to the rigid contact model [
14], the contact location and the contact unit normal are defined as if the grains have a circular shape and are rigid, and the contact is initially located at the corresponding Laguerre Voronoi edge. The main difference compared to the rigid contact model proposed in [
14] is that, in the flexible PM model, the contact relative velocity and the force transfer, from the contact location to the grains, need to include the grains’ inner FEM discretization.
The proposed flexible particle model keeps the essential characteristics of a DEM based model, which are the ability to include finite displacements and rotations, including complete detachment, and to recognize new contacts as the calculation progresses.
2.2. Fundamentals
At each step, given the applied forces, Newton’s second law of motion is invoked to obtain the new nodal points/particle positions. For a given nodal point, the equation of motion, including local non-viscous damping, may be expressed as:
where
is the total applied force and moment at time t including the exterior contact contribution, m is the nodal point mass, and
is the nodal point acceleration. The damping forces follow a local non-viscous damping formulation [
23] and are given by:
where
is the nodal point velocity, α is the local non-viscous damping, and the function
is given by:
The nodal point forces applied at a given instant of time are defined by three parts:
where
are the external forces applied at the nodal point,
are the external forces due to the contact interaction with neighbouring entities which only occur at nodal points located at the grain boundaries, and
are the internal forces due to the deformation of the associated triangular FE elements adopted in the discretization of each grain [
24]. The external forces due to contact interaction,
, are defined in the following section.
The circular particles that are just considered for contact interaction purposes are rigidly associated with the inner nodal point located at the grain (Voronoi Cell) centre of gravity. For this reason, the rotational motion of the circular particles is not considered in the flexible model.
2.3. Flexible Contact Model
In the proposed flexible PM model, the interaction between two polygonal flexible particles is based on the 2D Voronoi generalized rigid contact model proposed in [
14] that naturally incorporates the force versus relative particle displacement relationships of the PCM contact model [
1,
2] and provides both moment transmission and simple physical constitutive models based on standard force displacement relationships.
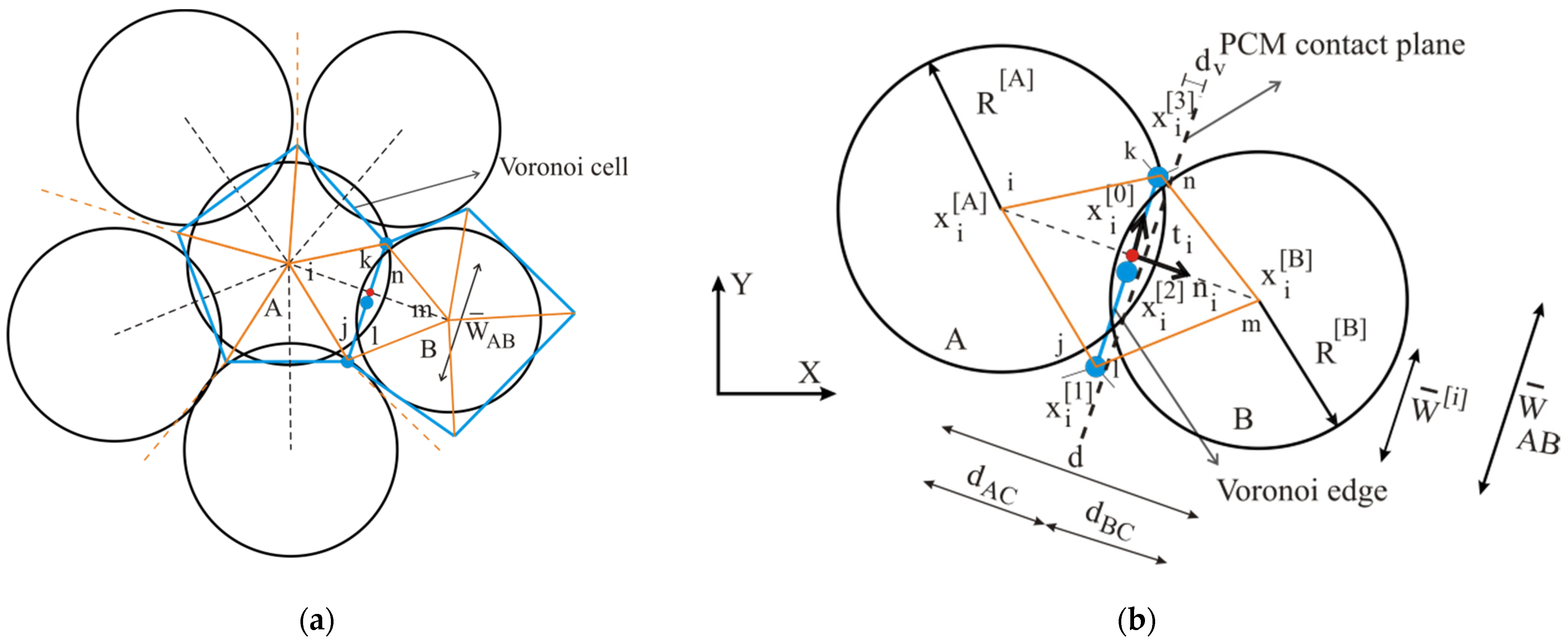
In the proposed contact model, like in the rigid contact model, the contact width and the contact location are defined by the Voronoi tessellation,
Figure 1a. Similarly, the contact width corresponds to the length of the associated Voronoi cell edge, and the contact location is defined by the Voronoi cell edge [
14]. The grains are considered to interact with neighbouring particles through the polygonal interface edges,
Figure 1a.
The inner FE triangular mesh discretization of each Voronoi cell is defined by a triangulation of the Voronoi vertexes and the point corresponding to the particle centre of gravity,
Figure 1. If required, it is also possible to add inner nodal points in order to refine the initial triangular FE mesh following a Delaunay triangulation scheme. Given that the rigid circular particles are only adopted to ease the contact interaction process, a scheme needs to be devised in order to transfer the contact forces from the contact locations to the corresponding nodal points of the FE mesh adopted in the grain discretization. The contact relative velocity also needs to be defined given the FE inner mesh nodal point velocities.
Like in the rigid contact version, the contact unit normal,
, is defined given the particles centre of gravity and the inter-particle distance, d,
Figure 1b:
Similar to the rigid contact model, the contact overlap for the reference contact point,
, and the reference contact point,
are defined by:
where
is the distance along the contact normal between the point contact model (PCM) geometric contact plane of the two circular particles in contact and the adopted contact plane as defined by the corresponding Voronoi cell edge. If the Voronoi cell edge is located along the PCM contact plane (
), the reference contact point location matches the contact location as defined in the traditional PCM contact model.
The position of each local contact point,
, is defined relatively to the reference local contact point, using the tangent vector to the Voronoi edge contact plane,
, and the contact distance in the tangent direction to the reference contact point,
:
For the case of a three local contact point scheme as defined in
Figure 1, the local contact point global coordinates are initially given by the Voronoi tessellation (the mid-point local contact location is given by averaging the Voronoi cell edge end point coordinates). The value of
for each local contact point is then defined using Equation (11) given that the locations are known and taken directly from the Voronoi tessellation. The same procedure is adopted for other types of local contact point distributions. In [
14], more details are given regarding the contact interaction.
In the proposed flexible contact model, the contact velocity is defined using the FE mesh discretization. As mentioned, the circular particles are rigidly associated with the inner nodal point that is initially located at the particle centre of gravity. The contact velocity of a given local contact point, which is the velocity of flexible particle B relative to flexible particle A, at the contact location is given by:
where
is the shape function value associated with nodal point “m” of the corresponding triangular finite element,
, at the local contact point location
, and
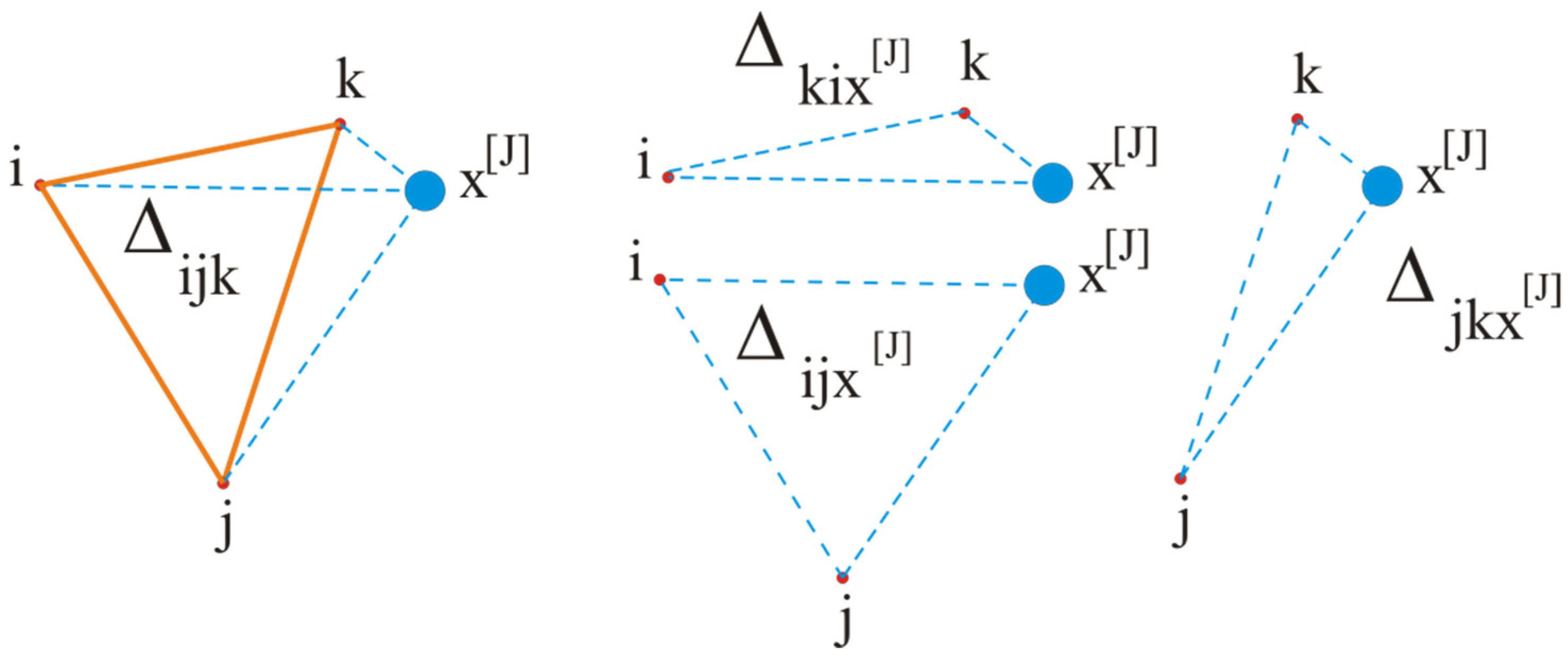
is the velocity of nodal point “m” of the corresponding triangular plane finite element, see
Figure 1b. The triangular shape functions’ values are defined in the traditional way according to the associated triangular areas (positive value clockwise), see
Figure 2:
The contact displacement normal increment,
, stored as a scalar, and the contact displacement shear increment,
, stored as a vector, are given by:
Given the normal and shear stiffnesses of the local contact point, the normal and shear forces increments are obtained following an incremental linear law:
The predicted normal and shear forces acting at the local contact point are then updated by applying the following equations:
Given the predicted normal and shear contact forces, the adopted constitutive model is applied, and, if the predicted forces do not satisfy the constitutive model, the necessary adjustments are carried out. The resultant contact force at the local contact point is then given by:
The contact force at each local contact point is then transferred to the nodal points of the associated FE triangle given the nodal shape functions. For the triangular plane finite element associated with particle A and for the triangular element associated with particle B (
Figure 1b), the local contact forces are distributed to each nodal point according to:
The proposed flexible contact model can be transformed into a PCM-Flexible contact model if only one local contact point, located at the reference contact point, is adopted in the contact discretization, and if the distance of the adopted contact plane, located at the Voronoi cell edge, to the PCM contact plane is zero ().
The proposed PM model also works under a large displacement hypothesis. If a new contact between two grains is found to occur, the Voronoi edge closest to the contact location is selected, in each grain, and the interaction follows the presented formulation. A similar contact interaction model, Pinball method, has been proposed by [
25], where spheres are embedded in each finite element. This is obviously an approximation, but the examples presented show that it is a valid approach with clear computational advantages when compared with the usual deformable polygonal based DEM formulations that use much more complex interaction models [
11,
13,
15]. If the grains had a more irregular shape, the geometry of each grain should be approximated by more than one circular particle [
25] in order to better represent its outer boundaries [
18].
2.5. Local Contact Stiffness and Local Contact Strength
In this work, the local contact normal and shear stiffnesses are given by:
where
is the contact area associated with the local point
,
is the normal stiffness adopted for the contact and
is the constant that relates the normal stiffness and the shear stiffness spring value. The total contact area is given by
, where
is the contact interface width given by the Voronoi cell edge length,
Figure 1b, and
is the out of plane thickness. The three local contact point scheme adopted in
Figure 1b follows the Lobatto quadrature rule positioning: two local contact points at each edge end-point and one local contact point in the middle of the segment. The end-points have an associated local contact area of
, and the mid-point has an associated contact area of
. The contact strength properties are defined given the maximum contact tensile stress,
, the maximum contact cohesion stress, τ, and the contact frictional term,
:
where
is the maximum contact local tensile strength, and
is the maximum local contact shear strength.
2.6. Local Contact Constitutive Model
Figure 3 shows the bilinear softening contact model adopted in the normal and shear directions. This contact model requires the definition of both the tensile fracture energy,
, and the shear fracture energy,
. The tensile damage value is defined based on the current local contact normal displacement (
)
Figure 3a, and the cohesion damage value is defined based on the current local contact shear displacement (
), only the cohesion part is affected,
Figure 3b. In each local contact point, the contact damage,
, is given by the sum of the tensile and shear contact damages. Given the current local contact damage, the local maximum tensile strength and maximum local cohesion strength are updated to:
A local crack is considered to occur when the maximum possible damage () is reached. At this stage, the local contact point is only considered to work under pure friction. A local contact crack is considered to be a tensile crack if the local contact was under a shear/tensile loading state when the maximum damage was reached. A local contact crack is considered to be a shear crack if the local contact was under a shear/compression loading state when the maximum damage was reached.
If the adopted contact fracture energy is equal to the energy corresponding to the elastic behaviour, the response of the bilinear model is the same as the response obtained using a traditional brittle Mohr–Coulomb model with tension cut-off. By using a bilinear softening model at the contact level, the fracture propagation occurs in a smoother and more controlled way than that numerically observed with a brittle model, allowing a less brittle response.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}