


Ground Subsidence above Salt Caverns for Energy Storage: A Comparison of Prediction Methods with Emphasis on Convergence and Asymmetry

Abstract
:1. Introduction
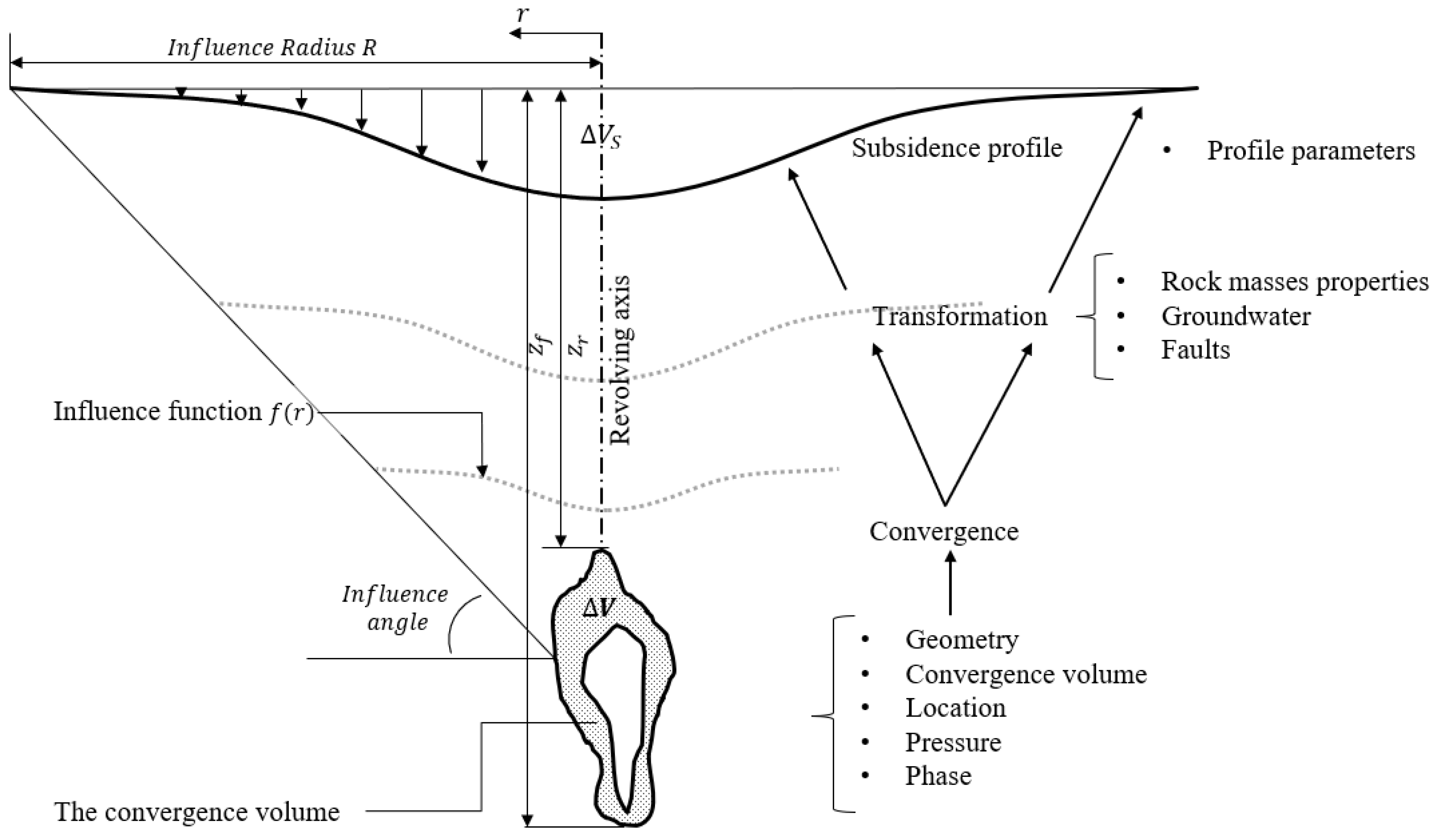
2. Ground Subsidence Prediction Models in the Context of Salt Caverns
2.1. Convergence
2.1.1. Convergence Models
Physical Models
Statistical Models
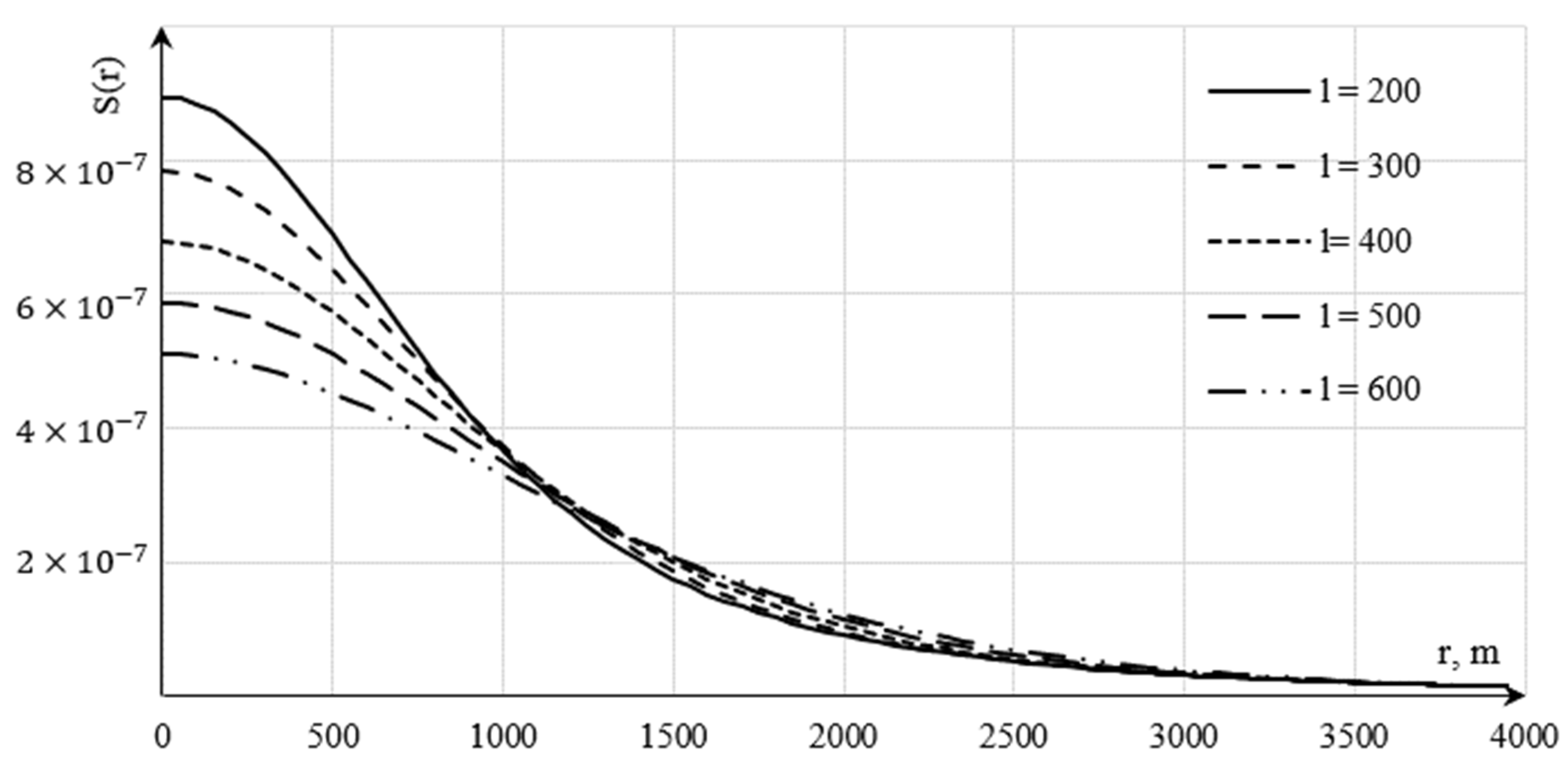
2.2. Transmission Coefficient a
2.3. Influence Factor e
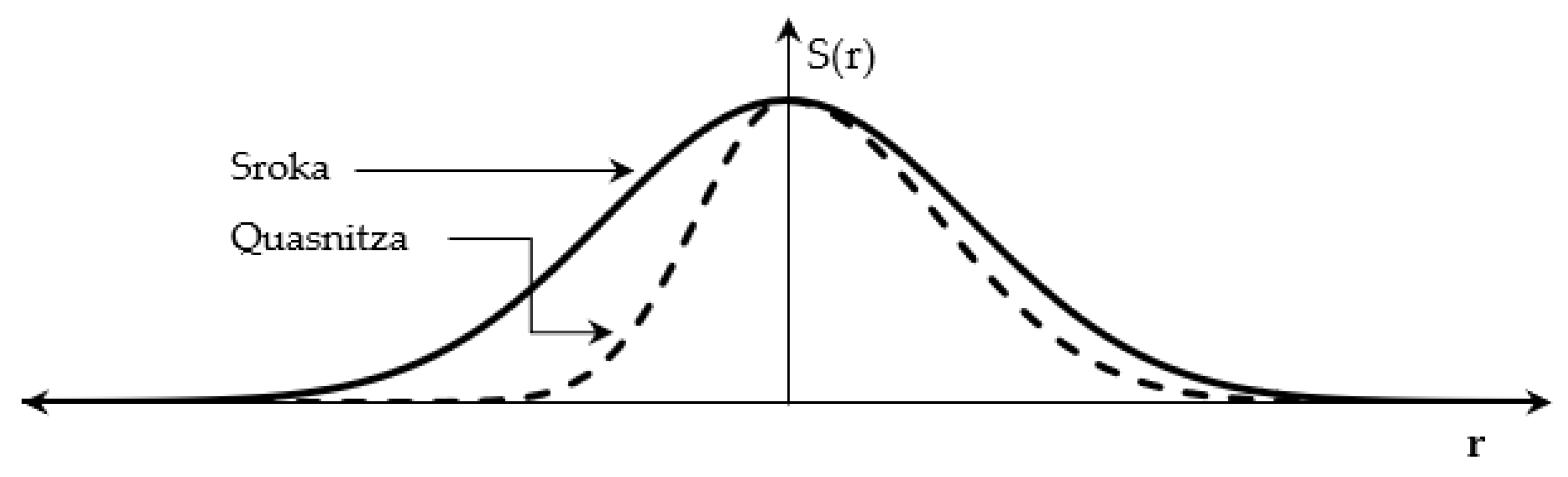
2.3.1. Physical Methods
2.3.2. Statistical Methods
2.4. Conclusions
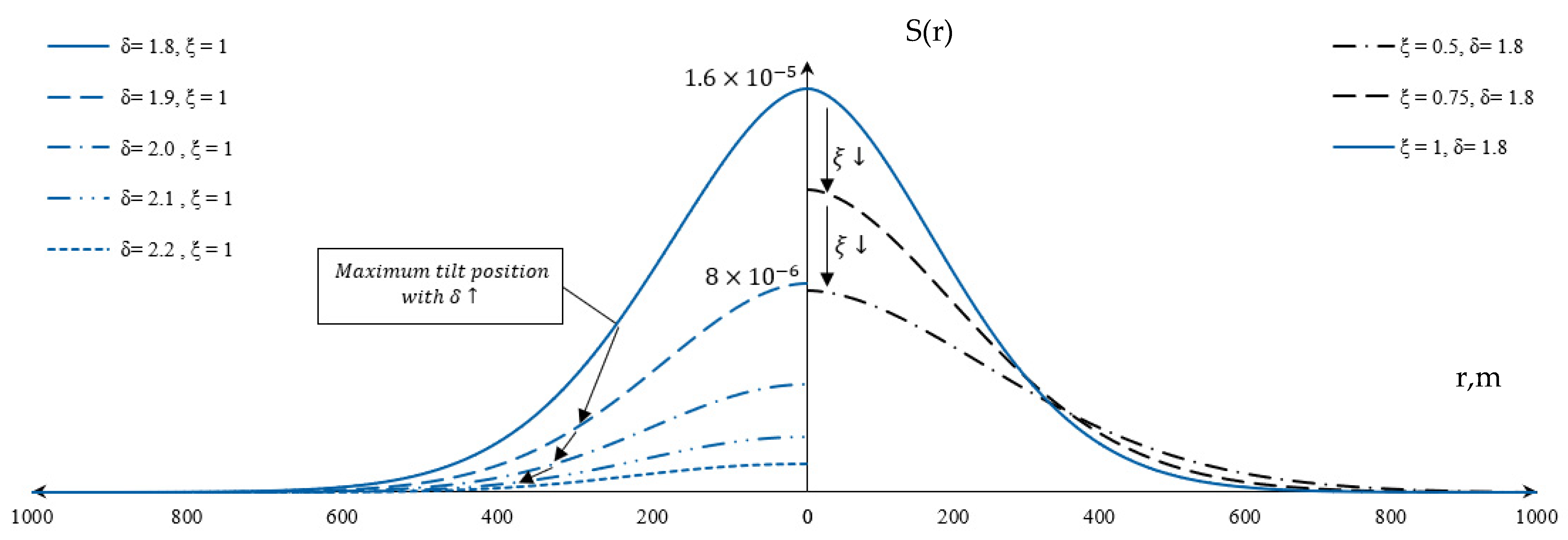
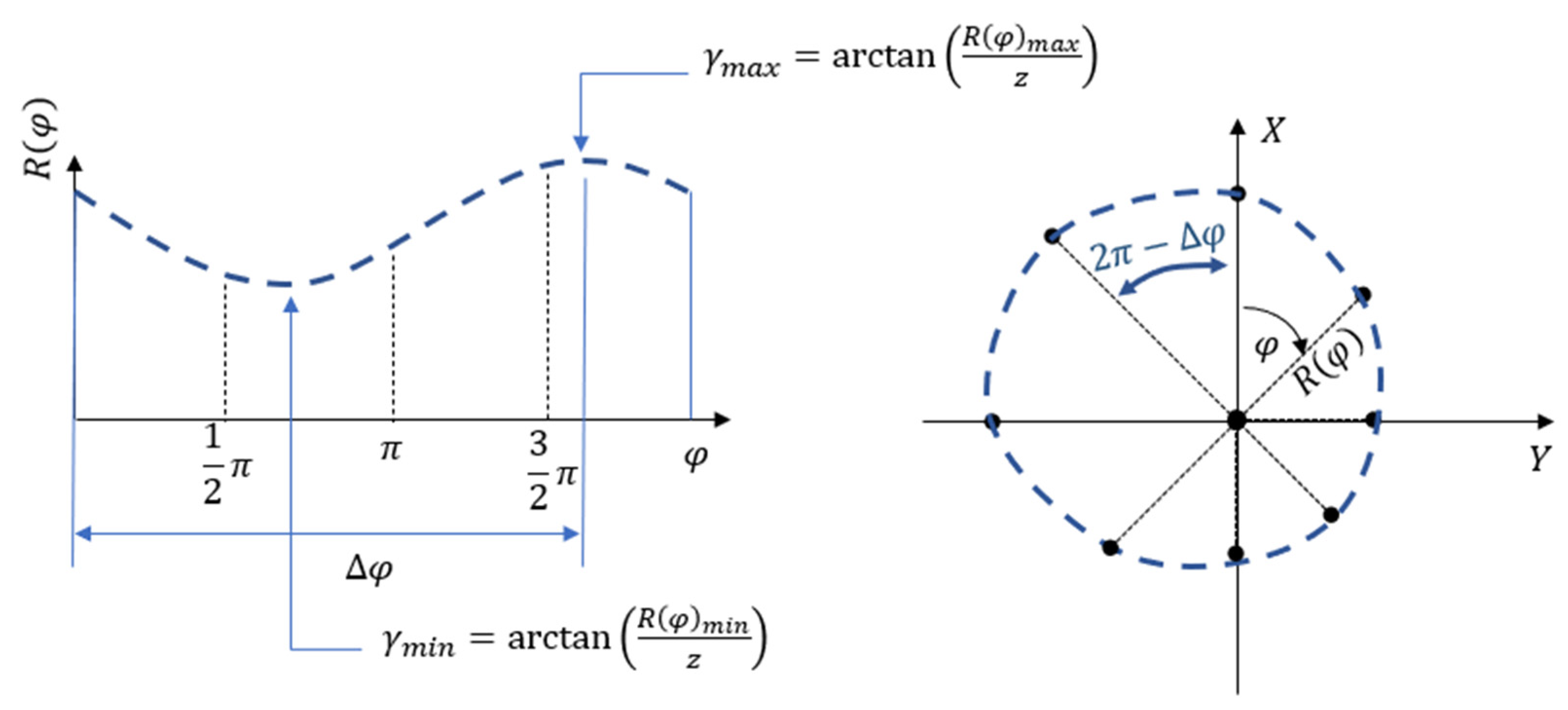
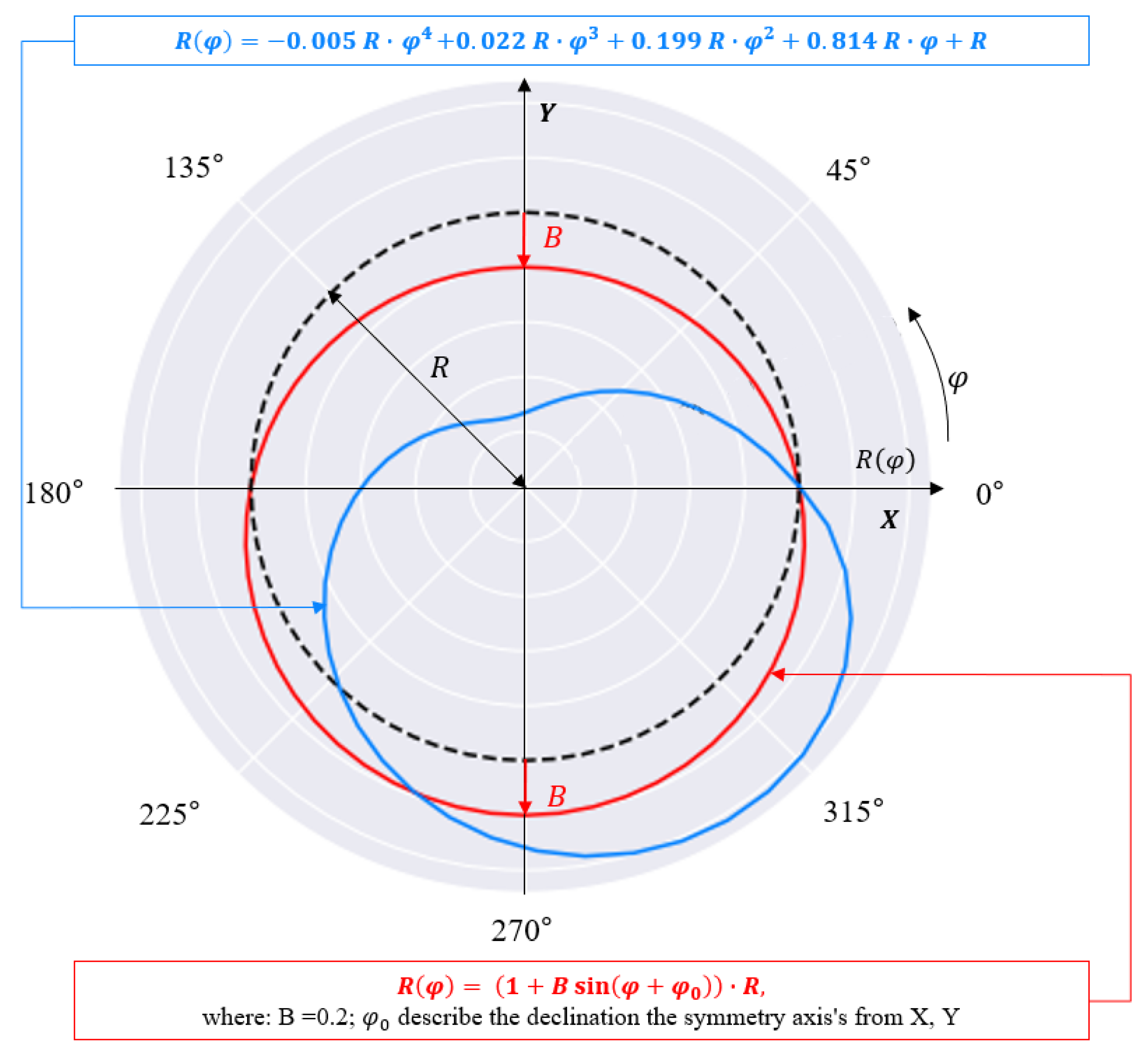
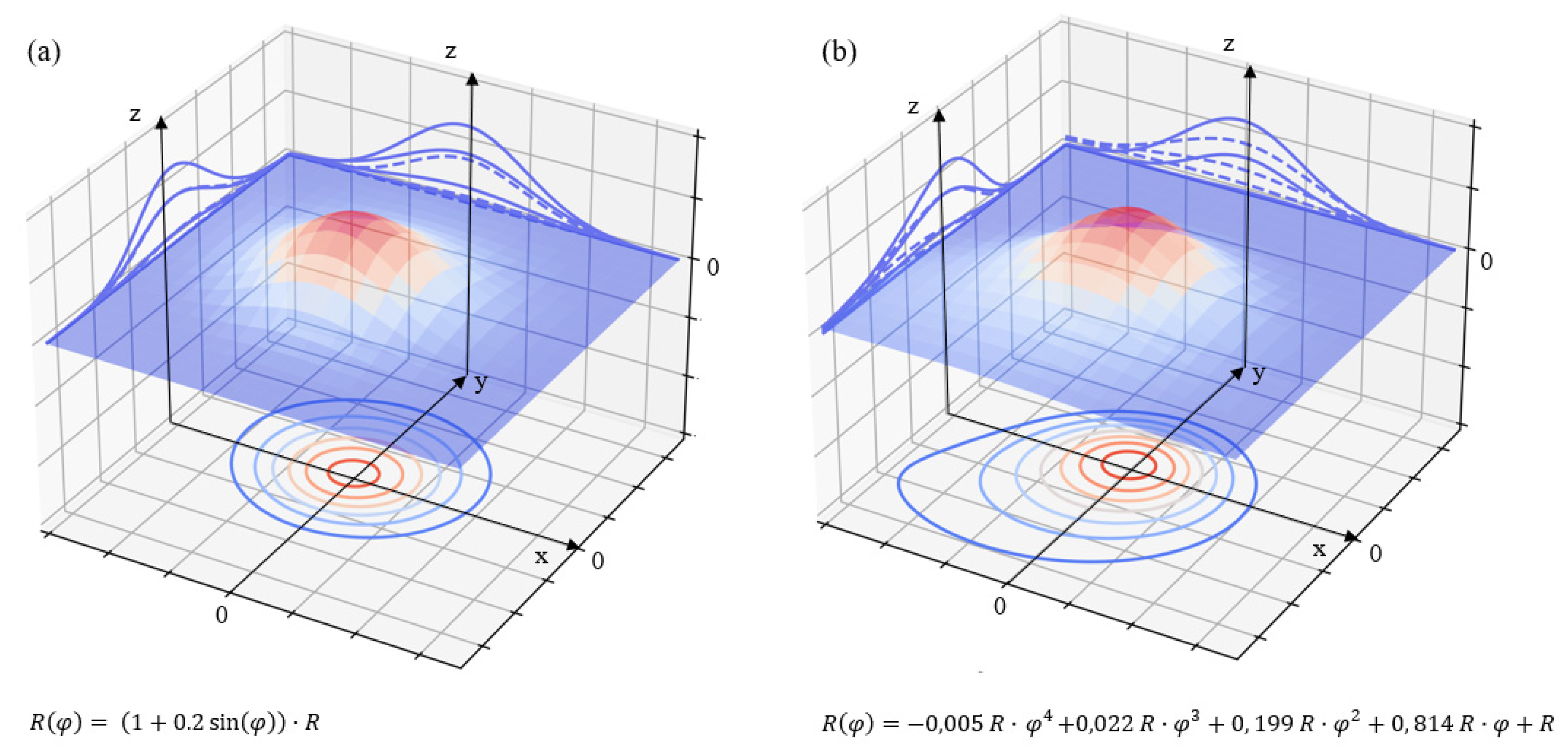
3. Introducing Asymmetry in the Model
- For the trigonometric function, the influence angle should be estimated either in the two directions of asymmetry: Δφ and Δφ + 1/2 π, or if they are unknown (usually) in three directions. Alternatively, the difference in direction should be concluded beforehand. In the case, R represents an average of in these two directions.
- For the polynomial function, the influence angle should be estimated in five different directions in order to estimate the polynomial function. The value of R in this case is the same, as in the sin function case, i.e., an average of .
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Crotogino, F. Traditional bulk energy storage—Coal and underground natural gas and oil storage. In Storing Energy, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2022; pp. 831–847. ISBN 9780128245101. [Google Scholar] [CrossRef]
- Wolf, E. Electrochemical Energy Storage for Renewable Sources and Grid Balancing; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Warnecke, M.; Röhling, S. Untertägige Speicherung von Wasserstoff—Status quo. Z. Dt. Ges. Geowiss. 2021, 172, 641–659. [Google Scholar]
- Ye, L.; Chen, F.; Ma, H.; Shi, X.; Li, H.; Yang, C. Subsidence above rock salt caverns predicted with elastic plate theory. Environ. Earth Sci. 2022, 81, 123. [Google Scholar] [CrossRef]
- Del Greco, O.; Garbarino, E.; Oggeri, C. A Multidisciplinary Approach for the Evaluation of the “Bottegone” Subsidence (Grosseto, Italy). In Engineering Geology for Infrastructure Planning in Europe; Hack, R., Azzam, R., Charlier, R., Eds.; Lecture Notes in Earth Sciences; Springer: Berlin/Heidelberg, Germany, 2004; Volume 104. [Google Scholar] [CrossRef]
- Kratzch, H. Bergschadenkunde; Deutscher Markscheider-Verein e. V.: Bochum, Germany, 2013. [Google Scholar]
- Peng, A. Surface Subsidence Engineering: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Ulusay, R. The ISRM Suggested Methods for Rock Characterization, Testing and Monitoring: 2007–2014; Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Sroka, A.; Schober, F. Die Berechnung der maximalen Bodenbewegungen über kavernenartigen Hohlräumen unter Berücksichtigung der Hohlraumgeometrie. Kali U. Steinsalz 1982, 8, 273–277. [Google Scholar]
- Hunsche, U.; Hampel, A. Rock Salt—The Mechanical Properties of the Host Rock Material for a Radioactive Waste Repository. Eng. Geol. 1999, 52, 307–321. [Google Scholar] [CrossRef]
- Zhang, Q.; Song, Z.; Wang, J.; Zhang, Y.; Wang, T. Creep Properties and Constitutive Model of Salt Rock. Adv. Civ. Eng. 2021, 2021, 8867673. [Google Scholar] [CrossRef]
- Holdsworth, S. Constitutive Equations for Creep Curves and Predicting Service Life. In Creep-Resistant Steels; Woodhead Publishing Series in Metals and Surface Engineering; Woodhead Publishing: Sawston, UK, 2008; pp. 403–420. ISBN 9781845691783. [Google Scholar] [CrossRef]
- Van Sambeek, L. Evaluating Cavern Tests and Surface Subsidence Using Simple Numerical Models. In Proceedings of the Seventh Symposium on Salt, Kyoto, Japan, January 1992; Volume I, pp. 433–439. [Google Scholar]
- Tajduś, K.; Sroka, A.; Misa, R.; Tajduś, A.; Meyer, S. Surface Deformations Caused by the Convergence of Large Underground Gas Storage Facilities. Energies 2021, 14, 402. [Google Scholar] [CrossRef]
- Mogi, K. Relations between the Eruptions of Various Volcanoes and the Deformations of the Ground Surfaces around Them. Bull. Earthq. Res. Inst. 1958, 36, 99–134. [Google Scholar]
- Eickemeier, R. Senkungsprognosen über Kavernenfeldern—Ein Neues Modell-.34; Geomechanik-Kolloquium: Leipzig, Germany, 2005. [Google Scholar]
- Quasnitza, H. Eine Strategie zur Kallibrierung Markscheiderischer Bewegungsmodelle und zur Prädiktion von Bewegungselementen. Doctoral Dissertation, Technical University Clausthal, Lower Saxony, Germany, 1988. (In German). [Google Scholar]
- Babaryka, A.; Benndorf, J. Investigation about the Contribution of Tectonic Conditions to Mining Subsidence Parameters. Min. Sci. 2022, 29, 105–118. [Google Scholar] [CrossRef]
- Jones, T.; Nordlund, E.; Wettainen, T. Mining-Induced Deformation in the Malmberget Mine. Rock Mech. Rock Eng. 2019, 52, 1903–1916. [Google Scholar] [CrossRef] [Green Version]
- Favorito, D.A.; Seedorff, E. Laramide Uplift near the Ray and Resolution Porphyry Copper Deposits, Southeastern Arizona: Insights into Regional Shortening Style, Magnitude of Uplift, and Implications for Exploration. Econ. Geol. 2020, 115, 153–175. [Google Scholar] [CrossRef]
- Sepehri, M.; Apel, D.; Hall, R. Prediction of mining-induced surface subsidence and ground movements at a Canadian diamond mine using an elastoplastic finite element model. Int. J. Rock Mech. Min. Sci. 2017, 100, 73–82. [Google Scholar] [CrossRef]
- Magambo, I.; Dikgang, J.; Gelo, D.; Tregenna, F. Environmental and Technical Efficiency in Large Gold Mines in Developing Countries. University of Johannesburg. 2021. Available online: https://mpra.ub.uni-muenchen.de/108235/ (accessed on 6 March 2023).
- Khanal, M.; Qu, Q.; Zhu, Y.; Xie, J.; Zhu, W.; Hou, T.; Song, S. Characterization of Overburden Deformation and Subsidence Behavior in a Kilometer Deep Longwall Mine. Minerals 2022, 12, 543. [Google Scholar] [CrossRef]
- Xia, K.; Chen, C.; Liu, X.; Fu, H.; Pan, Y.; Deng, Y. Mining-induced ground movement in tectonic stress metal mines: A case study. Bull. Eng. Geol. Environ. 2016, 75, 1089–1115. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Influence |
|---|---|
| Confining pressure | An increase in stress increases strain rate over time . However, when confining pressure exceeds 4 MPa, the creep behaviour of salt rock is independent of confining pressure. |
| Temperature |
|
| NaCl content | The decay creep rate and steady creep rate of salt rock increase with the increase in NaCl content. |
| Water | Water can be formed nearby the grain structure, which can promote the release of elastic energy stored in salt rock and accelerate the creep development process of salt rock. In geomechanics, creep life refers to the amount of time it takes for a material to deform or fail under a constant load or stress. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Babaryka, A.; Benndorf, J. Ground Subsidence above Salt Caverns for Energy Storage: A Comparison of Prediction Methods with Emphasis on Convergence and Asymmetry. Mining 2023, 3, 334-346. https://doi.org/10.3390/mining3020020
Babaryka A, Benndorf J. Ground Subsidence above Salt Caverns for Energy Storage: A Comparison of Prediction Methods with Emphasis on Convergence and Asymmetry. Mining. 2023; 3(2):334-346. https://doi.org/10.3390/mining3020020
Chicago/Turabian StyleBabaryka, Aleksandra, and Jörg Benndorf. 2023. "Ground Subsidence above Salt Caverns for Energy Storage: A Comparison of Prediction Methods with Emphasis on Convergence and Asymmetry" Mining 3, no. 2: 334-346. https://doi.org/10.3390/mining3020020