
An Introduction to Atmospheric Pollutant Dispersion Modelling †


School of Health, Medical & Applied Sciences, Central Queensland University, North Rockhampton, QLD 4701, Australia
†
Presented at the 5th International Electronic Conference on Atmospheric Sciences, 16–31 July 2022; Available online: https://ecas2022.sciforum.net/ .
Environ. Sci. Proc. 2022, 19(1), 18; https://doi.org/10.3390/ecas2022-12826
Published: 14 July 2022
(This article belongs to the Proceedings of The 5th International Electronic Conference on Atmospheric Sciences)
Abstract
:Modelling the dispersion of atmospheric pollutants plays an important role in regulatory and epidemiological settings. Although the majority of modelling concepts were developed in the 1980s, a significant amount of optimisation and refinement of dispersion models has occurred since this time. In addition, some completely novel models such as computational fluid dynamics have emerged. Furthermore, next generation models are continually improving the accuracies of the results obtained. This review provides a non-technical outline of the mechanisms of atmospheric pollutant dispersion modelling and discusses common model types and their applications.
1. Introduction
With the well-established link between various forms of air pollution and detrimental health conditions including respiratory conditions [1,2,3], cardiovascular disease [4,5,6], cancer [7,8] and other systemic conditions [9,10], the importance of maintaining air quality has never been more accentuated. Particularly in light of the continuing decrease in ambient air quality in regions such as East Asia [11], the modelling of atmospheric pollutants plays a vitally important role in guiding regulatory decisions relating to existing and future air quality [12,13,14]. In addition to providing the ability to predict (i.e., forecast) pollutant levels at a given timepoint [15], pollutant modelling allows for specific pollution events to be traced back to their most likely origin [16]. Amongst the numerous potential uses, this is particularly important for regulatory decision making or planning [12,17,18], epidemiological studies [19,20] and forensic purposes (i.e., identification of the polluter(s) responsible for an observed reduction in air quality) [16,21,22]. Air quality monitoring also plays in important role in allowing industries to demonstrate their compliance with national air quality standards [23].
The choice of pollutant dispersion model plays a key factor in the accuracy of the results obtained [24]. The available modelling techniques were reviewed by Daly and Zannetti [25] over a decade ago, and more recently by Barratt [26] and Colls and Tiwary [27]. In addition, several recent reviews have focussed on the modelling techniques specifically associated with traffic-derived atmospheric pollution [28,29]. However, the technical jargon associated with such reviews may render them unintelligible for the layperson. This review aims to provide a simple introduction to atmospheric pollutant dispersion modelling in terminology accessible to the uninitiated and outline the currently available models. Particular emphasis is given to models and applications reported over the past five years.
2. The Basics of Dispersion Modelling
2.1. Data Input
The basic inputs of a pollutant dispersion model include the emission source(s) and pollutant emission levels, meteorological conditions and any changes, topography and any chemical processes (if applicable). A range of possible inputs is given in Table 1.
2.2. Data Processing—The “Black Box”
For many, the model comprises a “black box” wherein the necessary data is entered, the start button is pressed and the outputs consequently analysed. Indeed, with the rising complexity of the models available, it would be impractical for most users to spend the time necessary to gain a complete understanding of the operations of the model they are using.
At the most basic level, atmospheric models comprise one or more mathematical formulae that take into account the input parameters to calculate the concentrations of one or more pollutants at specific locations at any point downwind or downtime. Clearly, the most accurate results would be gained from modelling the trajectory of every pollutant molecule over the simulation period. However, this would require an inordinate amount of processing power. Rather, models must simulate pollutants as a number of discrete components, typically taking either a fixed grid (Eulerian) or trajectory approach. With the fixed grid approach, the area in question is divided into a grid; the air quality within each grid is calculated at each time point based on its previous air quality and that of adjacent grids, taking into account the prevailing meteorological conditions [23]. In the simpler trajectory approach, the emissions are chunked into either a single block or a number of “puffs”, each comprising a potentially variable (albeit known) amount of pollutant [30]. The directional and temporal spread of each puff is then simulated.
In order to do this, processing power is divided among a number of modules, each connected to the core “dispersion” module. Each module simulates a specific aspect within the simulation, such as the identity and concentrations of any pollutants present, any chemical reactions, effects of buildings or terrain, effects of meteorology, plume rise, and deposition of pollutants. Other modules may be added onto a model. For example, the module PRIME (Plume RIse Model Enhancements) is included in many regulatory dispersion models (e.g., ISC, AERMOD, CALPUFF, TAPM, AUSPLUME), allowing for the prediction of turbulent flow and mixing induced by buildings.
Some models (“reactive models”) also allow for chemical reactions between components to be simulated. This allows for more realistic prediction of the true atmospheric quality, albeit at a higher processor cost. Concentrations of compounds such as CO and SO2 are often forecast using non-reactive models due to their relative inertness, while the more chemically reactive species NO, NO2 and O3 necessitate the use of reactive models [23].
2.3. Data Output
Although outputs will depend on the specific application to which the model is applied, the most important output is typically the predicted concentrations of specific pollutants at given point(s) surrounding the emission source, at specified points in time.
Before being released to the general public, the outputs of a new pollutant dispersion model will be calibrated against the true pollutant levels across a number of sites, obtained from air quality monitoring stations. Particularly with the rise of cheaper air quality monitoring stations which could be implemented more widely [31,32], the validation of dispersion models, both pre- and post-release, is expected to only increase in the future.
2.4. Data Analysis
From the data output, an assessment of likely environmental or health effects can then be made. Despite its seeming simplicity, accurate interpretation of the model output is of the utmost concern. If the model results are not interpreted correctly, then there is little point in running the model in the first place.
2.5. Simulation Timeframe
Models can either be short-term (hours to days) or long-term (months to years) [23,33]. Short-term modelling is typically used for predicting pollutant levels under “worst case” scenarios. On the other hand, long-term modelling is often used for epidemiological and atmospheric deposition studies [23].
3. Box Models
3.1. Introduction
Box modelling is one of the earliest and simplest forms of pollutant dispersion modelling. Traditionally, box models found particular use in situations requiring the simulation of chemical interactions between pollutants, as the simplified spatial and temporal dispersion allowed for a greater focus on the chemical aspects.
In a box model, the airshed is assumed to be a simple box of set dimensions, with all emissions released into the box. Once released, the emissions are assumed to be evenly distributed throughout the box. As expected, the accuracy of such a model is quite limited, as shown in comparative studies [34]. The main advantage of the box model is its simplicity, thus requiring very little processing power and allowing for very fast simulation runtimes. In addition, very little input data are required.
3.2. Examples of Simple Box Models
EKMA
The model EKMA (Empirical Kinematic Modelling Approach) was used as an early method of assessing the likelihood of photochemical smog formation in urban settings [35]. In this model, the concentrations of VOCs and NOx were assumed to remain constant from their values measured in the early morning. EKMA is in fact a type of Lagrangian simulation, albeit limited to a box model system [36,37]. Despite its age, EKMA is still occasionally used for the study of ozone-NOx-VOCs relationships in simple settings [38,39,40].
3.3. Uses
Given their overt simplicity, box models are not commonly used in contemporary regulatory settings except for preliminary assessment purposes [41]. However, they do retain a place in pollutant dispersion modelling, particularly in small anthropogenic enclosed spaces. For example, Lin, et al. [42] applied a box model to investigate the disappearance of formaldehyde from indoor air spaces via photodegradation. Given the relatively small air spaces indoors coupled with the frequent lack of ventilation to the outdoor environment, the use of a box model is quite appropriate in such circumstances. Nevertheless, more complicated models have also been applied to the indoor environment [43].
Modified versions of the box model, such as a two-box model, have been utilised in modelling photochemical pollutant levels in street canyons (i.e., a street enclosed by tall buildings on each side) [44,45], amongst other uses [46]. Many other models designed specifically for street canyons are based off the box model, albeit typically modelling each street as an individual box. Examples include the STREET and STREET-BOX models [47,48].
4. Eulerian Models
4.1. Introduction
Eulerian models take a strictly mathematical approach to pollution modelling. The area of study is divided into a number of grid cells, both horizontally and vertically, and the average pollutant concentration within each cell is calculated at each time point. Eulerian dispersion modelling was introduced by Reynolds, et al. [49]. Although initially used for modelling time periods of only a few days per simulation, more recent versions may be used for longer periods of time.
As Eulerian models are based on the average grid concentrations rather than following an entire plume, they easily account for removal of the constituent particles through deposition or chemical reactions [50].
4.2. Examples
4.2.1. TAPM
The Air Pollution Model (TAPM), developed by CSIRO [51], is unusual for a dispersion model in that it can use either a Eulerian grid or Lagrangian particle model to calculate dispersion [52]. The latter is considered to be more accurate at locations close to the emission source. Another remarkable aspect is its ability to extract meteorological conditions from synoptic charts (past, present or forecast). Surface measurements can also be incorporated.
TAPM functions particularly well in complex situations, such as locations with a sea breeze or complex terrain [53]. The incorporated prognostic meteorological model has also been used to provide meteorological input data for other dispersion models [54,55]. As expected for a mathematical-based simulation, TAPM is quite computationally intensive.
4.2.2. Variable K-Theory Model
A Eulerian Variable K-Theory model has been found to provide the highest accuracy compared to box, Gaussian plume and Lagrangian models, when simulating NO2 and SO2 concentrations across 17 sites [34].
5. Gaussian Models
5.1. Introduction
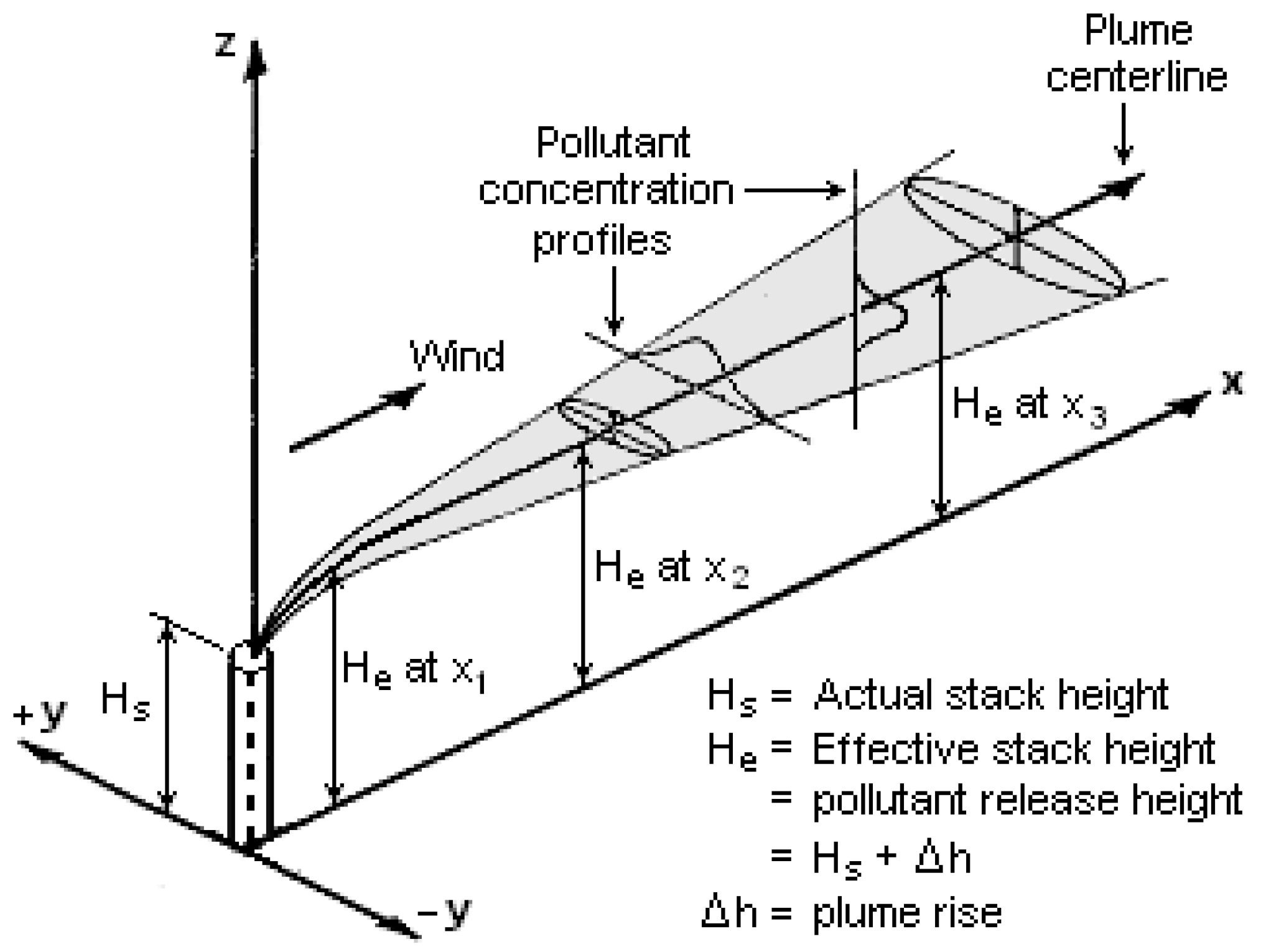
Based off the assumption that plume spread is due to the diffusion of the constituent pollutants, Gaussian models take the pollutant concentrations to follow a normal (Gaussian) distribution in both the horizontal and vertical aspects [23], as determined through experimental measurements of plume spread [58]. These models have been in regulatory use in the USA for almost 60 years [23]. Gaussian plume models assume the pollutants are emitted at a continuous rate, modelling the pollutants as a single, continuous plume (Figure 1). Gaussian plumes expand in two dimension over time (y and z). Gaussian plume models require the following assumptions: the emission and meteorological conditions must remain constant, no chemical transformations occur, and wind speeds always equal or exceed 1 m s−1 [23].
Inputs include factors such as the pollutant release rate, release height, wind speed (at the reference height; often the height of emissions release), mixing/inversion height, and the horizontal and vertical dispersion factors. In addition, rising or sinking of the plume may be modelled. When the plume reaches the ground or the upper boundary layer of air, it is assumed to reflect quantitatively from these surfaces. Over time, this may lead to the false appearance of pollutants accumulating at ground level, which can be accounted for in the model [23]. Further detail surrounding the mathematical calculations underlying Gaussian models is presented by Godish, et al. [23], hence will not be discussed in detail here.
5.2. Gaussian Plume Models
5.2.1. AEOLIUSF
AEOLIUSF (Assessing the Environmental Of Locations In Urban Streets Full version) is designed for modelling dispersion in urban street canyons [26,59]. Compared to other street models, AEOLIUS/AEOLIUSF is not as commonly used in contemporary settings. Its accuracy is middle-of-the-range, being higher than STREET models but lower than SEUS models [24].
5.2.2. AERMOD
AERMOD superseded the ISC model as the preferred Gaussian plume model of the US EPA [Environmental Protection Agency [EPA] [60]. From the meteorological conditions, terrain and upper atmospheric conditions entered, a single wind field is calculated and used in the simulation, while the terrain, elevation, surface roughness and land use is used to calculate factors such as the turbulence, stability class and Monin–Obukhov length (a continuous measure of near-surface atmospheric stability) [25]. AERMOD is suitable for ground or elevated sources, and both simple and complex terrain [60]. AERMOD is unsuitable for modelling when the wind speed is zero [61].
Contemporary applications of AERMOD include assessing complex industrial emissions [62], modelling emissions from cement factories [63,64] and gas-fired power plants [65], and predicting near-road pollutant levels [66]. In particular, pollutant sources surrounded by complex terrain are often modelled via AERMOD [67].
5.2.3. AUSPLUME
This model is often used in Australia and New Zealand. Its level of detail is believed to be a little lower than AERMOD; however, AUSPLUME can be used in modelling situations where the wind speed is zero [61].
5.2.4. CALINE3
CALINE is a modified Gaussian plume model, where the emission source is a line rather than a point [70]. Its main use is in modelling pollutant dispersion from roads; the road geometry can be varied rather than being restricted to a straight line. CALINE3 remains an EPA-recommended Gaussian line model [60], while the updated CALINE4 model is also used in some contemporary applications [71]. CALINE3 is designed for relatively simple terrain and forms the basis of models such as CAL3QHC and CAL3QHCR [60].
Ref [71] used CALINE4, combined with ISCST3, to predict NO2 and PM10 concentrations along a road line source.
5.2.5. CAL3QHC and CAL3QHCR
Both models are based off CALINE3, but are specifically designed for determining the build-up of CO hotspots resulting from traffic stagnation, particularly at intersections [60]. CAL3QHCR is the “refined” version of CAL3QHC and consequently requires a greater data input, in particular localised meteorological data [60].
5.2.6. CTDMPLUS
As suggested by its name, Complex Terrain Dispersion Model Plus Algorithms for Unstable Situations (CTDMPLUS) is designed for use in complex terrain situations [74]. However, it can be used in all stability conditions (including stable and neutral conditions) [60]. From a review of the literature, it does not appear to be commonly used in contemporary settings.
5.2.7. ISC
The ISC (Industrial Source Complex) model, as reported and evaluated by Bowers, et al. [75], was previously the approved Gaussian plume model of the US Environmental Protection Agency (EPA) [25]. Recent applications of the ISC model include modelling VOCs downwind of a petrochemical manufacturing plant [76] and monitoring a number of pollutants (CO, VOC, NOx and PM10) in Italian agricultural land [77,78]. Some authors also combine the ISC model with AEROMOD for improved accuracy of the results [79,80].
5.2.8. OCD
The Offshore and Coastal Dispersion (OCD) model is a straight-line Gaussian model, designed for predicting the dispersion of pollutants over marine or coastal regions [60]. Changes as the plume crosses the coastline are incorporated [60]. This model has been used across a range of environments, including the Gulf of Mexico [81].
6. Lagrangian Models
6.1. Introduction
Lagrangian models simulate a number of “puffs” of pollutants emitted from the source, usually at regular intervals. The most common is a “Gaussian puff” model, where each puff is assumed to follow a Gaussian distribution as it moves downwind and expands. The puffs are 3D elements that expand in all dimensions (x, y and z) over time, concurrently moving downwind from the emission source. A model may comprise hundreds to hundreds of thousands of these theoretical puffs [25]. As each puff is treated independently, they can have varying rates of dispersion and move in various directions, allowing for more realistic modelling of local conditions within the simulation. Another related model of this type is the Lagrangian random walk model, where the plume is discretised as numerous independent tracer particles. The particles are transported by the mean wind field with local turbulence accounted for using a stochastic ‘random walk’ algorithm. In particular, Lagrangian models show improved accuracy in models with complex topography or flow patterns (e.g., recirculation of the pollutants) and temporal variation in emissions or meteorology.
Lagrangian models are often used for modelling across longer distances and timeframes (up to several years long) [25]. In contrast, Gaussian plume models are typically restricted to predictions up to 50 km from the point source [23]. The field of Lagrangian modelling was introduced by Rodhe [82], Rodhe [83] and has gathered momentum rapidly since that time.
6.2. Examples
6.2.1. AFTOX
The AFTOX (Air Force Toxic) chemical dispersion model was created by Kunkel [87]. It assumes that four Gaussian puffs are released from the source every minute. As it does not account for decay or settling of the pollutants, AFTOX often provides higher pollutant concentrations and a lower accuracy compared to other model types [34]. AFTOX is restricted to neutrally buoyant gases, but is particularly useful for modelling liquid spills which subsequently evaporate [88].
AFTOX was recently used as the basis for modelling investigating the relationship between raindrop size and the scavenging efficiency of aerosol particles [89].
6.2.2. CALPUFF
CALPUFF is the approved long-range (>80 km) atmospheric emissions model of the US EPA [25]. However, CALPUFF also finds use in short-range simulations with complex surface topography [90], being widely used as a regulatory model in Australian and New Zealand. CALPUFF is versatile at both short-range and long-range simulations [25]. With more recent software such as VISTAS version 6, CALPUFF can be run at timescales of less than one hour [91].
Applications include the modelling of odour dispersion [92,93], dispersion of various pollutants produced by industrial facilities [62] and in the study of shipping emissions in a Western Australian port [94]. One application of particular note was the modelling of atmospheric mercury released from a coal-fired power plant in Mexico [95]. Numerous studies have also utilised CALPUFF in modelling dispersion over complex terrain [90,96].
6.2.3. Hybrid Eulerian–Lagrangian Dispersion Models (HDMs)
Hybrid models combining the Eulerian and Lagrangian methods, as outlined by Andrén [97], remain relatively common, particularly for simulating dispersion close to point-line sources [14]. The emissions are initially modelled as puffs using the Lagrangian method, then after travelling a specified distance or expanding to a specified level, the puffs are assumed to approximate a volume emission. The Eulerian method then takes over to calculate the long-range pollutant dispersal [14]. The major advantage of this method is the reduction in required processing power compared to using a Lagrangian model at all scales [14].
7. Computational Fluid Dynamics Models
7.1. Introduction
Computational fluid dynamics (CFD) has been a well-established modelling technique in engineering disciplines for many years. However, it is only relatively recently that it was turned toward the application of modelling atmospheric pollutants. CFD is based off Navier–Stokes equations, which are 3-dimensional, unsteady, non-linear, partial-differential equations that can exactly model the flow of atmospheric gases. The number of unknowns exceeds the number of discretised equations, hence different techniques are used to model unknown turbulence terms to find a solution. A Langrangian or Eulerian framework is incorporated into the model in order to calculate the transport and dispersion of contaminants through the atmosphere. Depending on the fidelity and resolution of the simulation, CFD models can require very large amounts of computing power.
There are three major classes of CFD models: Reynolds-Averaged Navier Stokes (RANS), Large Eddy Simulation (LES) and Direct Numerical Simulation (DNS).
7.2. Examples and Uses
Brown, et al. [102] compared the Quick Urban and Industrial Complex (QUIC) dispersion model, based off empirical parameterizations of the flow around and between buildings in order to model wind flow in an urban environment. Although the results of the model provided a similar accuracy to standard CFD modelling in this instance, the advantage of CFD models is that wind flow through novel building configurations and/or combinations can be simulated, rather than relying on empirical data.
Mocho, et al. [43] used a CFD model to investigate the movement of formaldehyde in an indoor setting. As expected, the accuracy of the results was improved over a simple box model.
8. Street Network Models
8.1. Introduction
The street network model is currently the least utilised contemporary modelling technique [105]. This method, designed for the analysis of vehicle emissions in built-up urban environments, typically treats each street as a line source of emissions, with the quantity of emissions calculated from the traffic volume along that street.
8.2. Examples
SIRANE
The SIRANE model, developed by Soulhac, et al. [106], is specifically designed for modelling pollutant dispersal from traffic in urban regions. To date, it is the main street network model reported in the literature [105]. Each street is modelled as a box, with transfer of pollutants occurring along the box (i.e., along the street), between boxes (at street intersections) and between boxes and the atmospheric boundary layer [106]. Atmospheric conditions may change hourly, but are assumed to be constant in between these timepoints. The model has been validated against wind tunnel data [107] and against a year of NO2 emissions data [105]. However, work by Wang, et al. [108] has suggested that the output of SIRANE shows a poor correlation with near-road NO2 concentrations, but better correlation with the average NO2 values. Nevertheless, SIRANE has been used in several epidemiological studies, particularly in France [109,110,111].
Derivative street pollution models have been created based off SIRANE, including MUNICH (Model of Urban Network of Intersecting Canyons and Highways), which utilises a grid modelling method [112].
9. Other Models
Specialised models are available for modelling pollutant dispersion over long ranges, in complex terrain, and for photochemically reactive pollutants [23]. One example is the Operational Street Pollution Model (OSPM) for modelling the chemistry of photochemical smog formation [108,113]. Other common photochemical models include CMAQ (Community Multiscale Air Quality), CAMx (Comprehensive Air quality Model with extensions), UAM (Urban Airshed Model®) and CALGRID [25]. Of particular note are CAMx, an open-source model [114], and UAM, the most widely used photochemical air quality model [25].
Statistical models are available for the short-term forecasting of air quality, based off recent and current air quality measurements [115]. Such models do not seek to establish cause and effect, rather solely aiming to link patterns in emission trends to the air quality [25]. In a similar fashion, machine-learning algorithms have also been trialled for the prediction of O3, NO2 and SO2 concentrations [116].
10. Conclusions
Atmospheric pollutant dispersion models have played an enormous role in setting and regulating atmospheric emission levels and have likely played a vital role in the improvement in air quality observed across many westernised countries over the past few decades. With new applications and models reported on a weekly basis, the emissions modeller is faced with a baffling array of models to choose from. However, a basic understanding of the mechanisms behind each model and the strengths and limitations of each should assist in guiding this choice. Particularly with advances in computer processing power and simulation abilities, the results produced by atmospheric pollutant dispersion models are more detailed and accurate than ever before. It is hoped that regulatory bodies will be able to utilise this accuracy in such a way that the world’s air quality continues to improve over the coming years.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The author declares that no conflict of interest exist.
References
- Xu, Q.; Li, X.; Wang, S.; Wang, C.; Huang, F.; Gao, Q.; Wu, L.; Tao, L.; Guo, J.; Wang, W. Fine particulate air pollution and hospital emergency room visits for respiratory disease in urban areas in Beijing, China, in 2013. PLoS ONE 2016, 11, e0153099. [Google Scholar] [CrossRef] [PubMed]
- Horne, B.D.; Joy, E.A.; Hofmann, M.G.; Gesteland, P.H.; Cannon, J.B.; Lefler, J.S.; Blagev, D.P.; Korgenski, E.K.; Torosyan, N.; Hansen, G.I. Short-term elevation of fine particulate matter air pollution and acute lower respiratory infection. Am. J. Respir. Crit. Care Med. 2018, 198, 759–766. [Google Scholar] [CrossRef] [PubMed]
- Johannson, K.A.; Balmes, J.R.; Collard, H.R. Air pollution exposure: A novel environmental risk factor for interstitial lung disease? Chest 2015, 147, 1161–1167. [Google Scholar] [CrossRef] [PubMed]
- Xie, W.; Li, G.; Zhao, D.; Xie, X.; Wei, Z.; Wang, W.; Wang, M.; Li, G.; Liu, W.; Sun, J. Relationship between fine particulate air pollution and ischaemic heart disease morbidity and mortality. Heart 2015, 101, 257–263. [Google Scholar] [CrossRef] [PubMed]
- Pope III, C.A.; Turner, M.C.; Burnett, R.T.; Jerrett, M.; Gapstur, S.M.; Diver, W.R.; Krewski, D.; Brook, R.D. Relationships between fine particulate air pollution, cardiometabolic disorders, and cardiovascular mortality. Circ. Res. 2015, 116, 108–115. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.G.; Xia, Y.; Shang, K.Z.; Cheng, Y.F.; Xu, L.; Ning, G.C.; Zhao, W.J.; LI, N.R. Association between ambient air pollution and hospital emergency admissions for respiratory and cardiovascular diseases in Beijing: A time series study. Biomed. Environ. Sci. 2015, 28, 352–363. [Google Scholar]
- Gharibvand, L.; Shavlik, D.; Ghamsary, M.; Beeson, W.L.; Soret, S.; Knutsen, R.; Knutsen, S.F. The association between ambient fine particulate air pollution and lung cancer incidence: Results from the AHSMOG-2 study. Environ. Health Perspect. 2016, 125, 378–384. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, L.-w.; Huang, J.-j.; Song, F.-j.; Zhang, L.-p.; Qian, Z.-m.; Trevathan, E.; Mao, H.-j.; Han, B.; Vaughn, M. Long-term exposure to urban air pollution and lung cancer mortality: A 12-year cohort study in Northern China. Sci. Total. Environ. 2016, 571, 855–861. [Google Scholar] [CrossRef]
- Bernatsky, S.; Smargiassi, A.; Barnabe, C.; Svenson, L.W.; Brand, A.; Martin, R.V.; Hudson, M.; Clarke, A.E.; Fortin, P.R.; van Donkelaar, A. Fine particulate air pollution and systemic autoimmune rheumatic disease in two Canadian provinces. Environ. Res. 2016, 146, 85–91. [Google Scholar] [CrossRef]
- Alves, A.G.F.; de Azevedo Giacomin, M.F.; Braga, A.L.F.; Sallum, A.M.E.; Pereira, L.A.A.; Farhat, L.C.; Strufaldi, F.L.; Lichtenfels, A.J.d.F.C.; de Santana Carvalho, T.; Nakagawa, N.K. Influence of air pollution on airway inflammation and disease activity in childhood-systemic lupus erythematosus. Clin. Rheumatol. 2018, 37, 683–690. [Google Scholar] [CrossRef]
- Geddes, J.A.; Martin, R.V.; Boys, B.L.; van Donkelaar, A. Long-term trends worldwide in ambient NO2 concentrations inferred from satellite observations. Environ. Health Perspect. 2015, 124, 281–289. [Google Scholar] [CrossRef] [PubMed]
- Chalabi, Z.; Milojevic, A.; Doherty, R.M.; Stevenson, D.S.; MacKenzie, I.A.; Milner, J.; Vieno, M.; Williams, M.; Wilkinson, P. Applying air pollution modelling within a multi-criteria decision analysis framework to evaluate UK air quality policies. Atmos. Environ. 2017, 167, 466–475. [Google Scholar] [CrossRef]
- Kumar, A.; Patil, R.S.; Dikshit, A.K.; Islam, S.; Kumar, R. Evaluation of control strategies for industrial air pollution sources using American Meteorological Society/Environmental Protection Agency Regulatory Model with simulated meteorology by Weather Research and Forecasting Model. J. Clean. Prod. 2016, 116, 110–117. [Google Scholar] [CrossRef]
- Sachdeva, S.; Baksi, S. Air Pollutant Dispersion Models: A Review. In Advances in Health and Environment Safety; Springer: Cham, Switzerland, 2017; pp. 203–207. [Google Scholar] [CrossRef]
- Forsyth, T. Public concerns about transboundary haze: A comparison of Indonesia, Singapore, and Malaysia. Glob. Environ. Chang. 2014, 25, 76–86. [Google Scholar] [CrossRef]
- Ling, Z.; Zhao, J.; Fan, S.; Wang, X. Sources of formaldehyde and their contributions to photochemical O3 formation at an urban site in the Pearl River Delta, southern China. Chemosphere 2017, 168, 1293–1301. [Google Scholar] [CrossRef]
- Po, L.; Rollo, F.; Viqueira, J.R.R.; Lado, R.T.; Bigi, A.; López, J.C.; Nesi, P. TRAFAIR: Understanding Traffic Flow to Improve Air Quality. In Proceedings of the 1st IEEE African Workshop on Smart Sustainable Cities and Communities (IEEE ASC2 2019)-In conjunction with the 5th IEEE International Smart Cities Conference (ISC2 2019), Casablanca, Morocco, 14–17 October 2019; pp. 14–17. [Google Scholar]
- Li, M.; Zhang, L. Haze in China: Current and future challenges. Environ. Pollut. 2014, 189, 85–86. [Google Scholar] [CrossRef]
- Khreis, H.; Kelly, C.; Tate, J.; Parslow, R.; Lucas, K.; Nieuwenhuijsen, M. Exposure to traffic-related air pollution and risk of development of childhood asthma: A systematic review and meta-analysis. Environ. Int. 2017, 100, 1–31. [Google Scholar] [CrossRef]
- Wang, M.; Gehring, U.; Hoek, G.; Keuken, M.; Jonkers, S.; Beelen, R.; Eeftens, M.; Postma, D.S.; Brunekreef, B. Air pollution and lung function in dutch children: A comparison of exposure estimates and associations based on land use regression and dispersion exposure modeling approaches. Environ. Health Perspect. 2015, 123, 847–851. [Google Scholar] [CrossRef]
- Xin, Y.; Wang, G.; Chen, L. Identification of long-range transport pathways and potential sources of PM10 in Tibetan Plateau uplift area: Case study of Xining, China in 2014. Aerosol Air Qual. Res 2016, 16, 1044–1054. [Google Scholar] [CrossRef]
- Squizzato, S.; Masiol, M. Application of meteorology-based methods to determine local and external contributions to particulate matter pollution: A case study in Venice (Italy). Atmos. Environ. 2015, 119, 69–81. [Google Scholar] [CrossRef]
- Godish, T.; Davis, W.T.; Fu, J.S. Air quality; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Dezzutti, M.; Berri, G.; Venegas, L. Intercomparison of Atmospheric Dispersion Models Applied to an Urban Street Canyon of Irregular Geometry. Aerosol Air Qual. Res. 2018, 18, 820–828. [Google Scholar] [CrossRef]
- Daly, A.; Zannetti, P. Air pollution modeling–An overview. In Ambient Air Pollution; Zannetti, P., Al-Ajmi, D., Al-Rashied, S., Eds.; The EnviroComp Institute: Half Moon Bay, CA, USA, 2007; pp. 15–28. [Google Scholar]
- Barratt, R. Atmospheric Dispersion Modelling: An Introduction to Practical Applications; Routledge: Abingdon-on-Thames, UK, 2013. [Google Scholar]
- Colls, J.; Tiwary, A. Air Pollution: Measurement, Modelling and Mitigation; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Forehead, H.; Huynh, N. Review of modelling air pollution from traffic at street-level-The state of the science. Environ. Pollut. 2018, 241, 775–786. [Google Scholar] [CrossRef] [PubMed]
- Khan, J.; Ketzel, M.; Kakosimos, K.; Sørensen, M.; Jensen, S.S. Road traffic air and noise pollution exposure assessment–A review of tools and techniques. Sci. Total. Environ. 2018, 634, 661–676. [Google Scholar] [CrossRef]
- Cécé, R.; Bernard, D.; Brioude, J.; Zahibo, N. Microscale anthropogenic pollution modelling in a small tropical island during weak trade winds: Lagrangian particle dispersion simulations using real nested LES meteorological fields. Atmos. Environ. 2016, 139, 98–112. [Google Scholar] [CrossRef]
- Cavaliere, A.; Carotenuto, F.; Di Gennaro, F.; Gioli, B.; Gualtieri, G.; Martelli, F.; Matese, A.; Toscano, P.; Vagnoli, C.; Zaldei, A. Development of Low-Cost Air Quality Stations for Next Generation Monitoring Networks: Calibration and Validation of PM2.5 and PM10 Sensors. Sensors 2018, 18, 2843. [Google Scholar] [CrossRef]
- Schneider, P.; Castell, N.; Vogt, M.; Dauge, F.R.; Lahoz, W.A.; Bartonova, A. Mapping urban air quality in near real-time using observations from low-cost sensors and model information. Environ. Int. 2017, 106, 234–247. [Google Scholar] [CrossRef] [PubMed]
- Raffee, A.F.; Rahmat, S.N.; Hamid, H.A.; Jaffar, M.I. A Review on Short-Term Prediction of Air Pollutant Concentrations. Int. J. Eng. Technol. 2018, 7, 32–35. [Google Scholar] [CrossRef]
- Gronwald, F.; Chang, S.-Y. Evaluation of the Precision and Accuracy of Multiple Air Dispersion Models. J. Atmos. Pollut. 2018, 6, 1–11. [Google Scholar]
- Carter, W.P.; Winer, A.M.; Pitts Jr, J.N. Effects of kinetic mechanisms and hydrocarbon composition on oxidant-precursor relationships predicted by the EKMA isopleth technique. Atmos. Environ. 1982, 16, 113–120. [Google Scholar] [CrossRef]
- Martinez, J.; Maxwell, C.; Javitz, H.; Bowol, R. Evaluation of the Empirical Kinetic Modeling Approach (EKMA); NTIS: Springfield, VA, USA, 1983. [Google Scholar]
- Martinez, J.R.; Maxwell, C.; Javitz, H.S.; Bawol, R. Performance evaluation of the Empirical Kinetic Modeling Approach (EKMA). In Air Pollution Modeling and Its Application II; Springer: Cham, Switzerland, 1983; pp. 199–211. [Google Scholar]
- Luo, H.; Yuan, Z.; Zheng, J.; Duan, Y. Source-based dynamic control strategies of ozone in different functional areas in Shanghai, China. In Proceedings of the EGU General Assembly, Vienna, Austria, 8–13 April 2018; p. 3237. [Google Scholar]
- Collet, S.; Kidokoro, T.; Karamchandani, P.; Shah, T. Future-Year Ozone Isopleths for South Coast, San Joaquin Valley, and Maryland. Atmosphere 2018, 9, 354. [Google Scholar] [CrossRef]
- Su, R.; Lu, K.; Yu, J.; Tan, Z.; Jiang, M.; Li, J.; Xie, S.; Wu, Y.; Zeng, L.; Zhai, C. Exploration of the formation mechanism and source attribution of ambient ozone in Chongqing with an observation-based model. Sci. China Earth Sci. 2018, 61, 23–32. [Google Scholar] [CrossRef]
- Singh, K. Air pollution modeling. Int. J. Adv. Res. Ideas Innov. Technol. 2018, 4, 951–959. [Google Scholar] [CrossRef]
- Lin, M.-W.; Jwo, C.-S.; Ho, H.-J.; Chen, L.-Y. Using box modeling to determine photodegradation coefficients describing the removal of gaseous formaldehyde from indoor air. Aerosol Air Qual. Res. 2017, 17, 330–339. [Google Scholar] [CrossRef]
- Mocho, P.; Desauziers, V.; Plaisance, H.; Sauvat, N. Improvement of the performance of a simple box model using CFD modeling to predict indoor air formaldehyde concentration. Build. Environ. 2017, 124, 450–459. [Google Scholar] [CrossRef]
- Zhong, J.; Cai, X.-M.; Bloss, W.J. Modelling photochemical pollutants in a deep urban street canyon: Application of a coupled two-box model approximation. Atmos. Environ. 2016, 143, 86–107. [Google Scholar] [CrossRef]
- Zhong, J.; Cai, X.-M.; Bloss, W.J. Modelling the dispersion and transport of reactive pollutants in a deep urban street canyon: Using large-eddy simulation. Environ. Pollut. 2015, 200, 42–52. [Google Scholar] [CrossRef]
- Jensen, A.; Dal Maso, M.; Koivisto, A.; Belut, E.; Meyer-Plath, A.; Van Tongeren, M.; Sánchez Jiménez, A.; Tuinman, I.; Domat, M.; Toftum, J. Comparison of geometrical layouts for a multi-box aerosol model from a single-chamber dispersion study. Environments 2018, 5, 52. [Google Scholar] [CrossRef]
- Johnson, W.; Ludwig, F.; Dabberdt, W.; Allen, R. An urban diffusion simulation model for carbon monoxide. J. Air Pollut. Control. Assoc. 1973, 23, 490–498. [Google Scholar] [CrossRef]
- Mensink, C.; Lewyckyj, N. A simple model for the assessment of air quality in streets. Int. J. Veh. Des. 2001, 27, 242–250. [Google Scholar] [CrossRef]
- Reynolds, S.D.; Roth, P.M.; Seinfeld, J.H. Mathematical modeling of photochemical air pollution—I: Formulation of the model. Atmos. Environ. 1973, 7, 1033–1061. [Google Scholar] [CrossRef]
- Ničeno, B.; Dhotre, M.; Deen, N. One-equation sub-grid scale (SGS) modelling for Euler–Euler large eddy simulation (EELES) of dispersed bubbly flow. Chem. Eng. Sci. 2008, 63, 3923–3931. [Google Scholar] [CrossRef]
- Hurley, P.J.; Edwards, M.; Physick, W.L.; Luhar, A.K. TAPM V3-model description and verification. Clean Air Environ. Qual. 2005, 39, 32. [Google Scholar]
- Hurley, P. Development and verification of TAPM. In Air Pollution Modeling and Its Application XIX; Springer: Cham, Switzerland, 2008; pp. 208–216. [Google Scholar]
- Matthaios, V.N.; Triantafyllou, A.G.; Albanis, T.A.; Sakkas, V.; Garas, S. Performance and evaluation of a coupled prognostic model TAPM over a mountainous complex terrain industrial area. Theor. Appl. Climatol. 2018, 132, 885–903. [Google Scholar] [CrossRef]
- Bang, H.Q.; Nguyen, H.D.; Vu, K.; Hien, T.T. Photochemical Smog Modelling Using the Air Pollution Chemical Transport Model (TAPM-CTM) in Ho Chi Minh City, Vietnam. Environ. Modeling Assess. 2019, 24, 295–310. [Google Scholar] [CrossRef]
- Trieu, T.; Duc, H.N.; Scorgie, Y. Performance of TAPM-CTM as an airshed modelling tool for the sydney region. In Proceedings of the 22nd International Clean Air & Environment Conference, Melbourne, Australia, 20–23 September 2015. [Google Scholar]
- Pollard, A.S.; Williamson, B.J.; Taylor, M.; Purvis, W.O.; Goossens, M.; Reis, S.; Aminov, P.; Udachin, V.; Osborne, N.J. Integrating dispersion modelling and lichen sampling to assess harmful heavy metal pollution around the Karabash copper smelter, Russian Federation. Atmos. Pollut. Res. 2015, 6, 939–945. [Google Scholar] [CrossRef]
- Sarkhosh, M.; Shamsipour, A.; Yaghmaeian, K.; Nabizadeh, R.; Naddafi, K.; Mohseni, S.M. Dispersion modeling and health risk assessment of VOCs emissions from municipal solid waste transfer station in Tehran, Iran. J. Environ. Health Sci. Eng. 2017, 15, 4. [Google Scholar] [CrossRef]
- Nieuwstadt, F.; van Dop, H. Atmospheric Turbulence and Air Pollution Modeling; D. Reidel Publishing Company: Dordrecht, The Netherlands, 1982; p. 358. [Google Scholar]
- Buckland, A. Validation of a street canyon model in two cities. Environ. Monit. Assess. 1998, 52, 255–267. [Google Scholar] [CrossRef]
- EPA. Air Quality Dispersion Modeling-Preferred and Recommended Models. Available online: https://www.epa.gov/scram/air-quality-dispersion-modeling-preferred-and-recommended-models (accessed on 15 October 2021).
- Goldstone, M. AERMOD; assessment of meteorlogical files and comparison with Ausplume for Area Source Modelling. Air Qual. Clim. Chang. 2015, 49, 38. [Google Scholar]
- Gulia, S.; Kumar, A.; Khare, M. Performance evaluation of CALPUFF and AERMOD dispersion models for air quality assessment of an industrial complex. J. Sci. Ind. Res. 2015, 74, 302–307. [Google Scholar]
- Yazdi, M.N.; Arhami, M.; Ketabchy, M.; Delavarrafeei, M. Modeling of Cement Factory Air Pollution Dispersion by AERMOD. In Proceedings of the A&WMA’s 109th Annual Conference & Exhibition, New Orleans, LA, USA, 20–23 June 2016. [Google Scholar]
- Jayadipraja, E.; Daud, A.; Assegaf, A.; Maming, M. The application of the AERMOD model in the environmental health to identify the dispersion area of total suspended particulate from cement industry stacks. J. Res. Med. Sci. 2016, 4, 2044–2049. [Google Scholar] [CrossRef]
- Singh, D.; MukeshSharma, A.; Shukla, S. Ambient Air Quality Modeling of 355 MW Gas Based Combined Cycle Power Plant in Complex Terrain. Indian J. Air Pollut. Control. 2016, 16, 10–16. [Google Scholar]
- Askariyeh, M.H.; Kota, S.H.; Vallamsundar, S.; Zietsman, J.; Ying, Q. AERMOD for near-road pollutant dispersion: Evaluation of model performance with different emission source representations and low wind options. Transp. Res. Part D Transp. Environ. 2017, 57, 392–402. [Google Scholar] [CrossRef]
- ul Haq, A.; Nadeem, Q.; Farooq, A.; Irfan, N.; Ahmad, M.; Ali, M.R. Assessment of AERMOD modeling system for application in complex terrain in Pakistan. Atmos. Pollut. Res. 2019, 10, 1492–1497. [Google Scholar] [CrossRef]
- Madear, G.; Traista, E.; Pop, I. Radon Dispersion Air Modeling in Banat Mining Area. In Mine Planning and Equipment Selection 2000; Routledge: Abingdon-on-Thames, UK, 2018; pp. 919–924. [Google Scholar]
- Idris, N.; Kamarulzaman, N.; Nor, Z.M. Odour Dispersion Modelling for Raw Rubber Processing Factories. J. Rubber Res. 2017, 20, 223–241. [Google Scholar] [CrossRef]
- Benson, P.E. A review of the development and application of the CALINE3 and 4 models. Atmos. Environment. Part B. Urban Atmos. 1992, 26, 379–390. [Google Scholar] [CrossRef]
- Majumder, S. Emission load distribution and prediction of NO2 and PM10 using ISCST3 and CALINE4 line source modeling. Appl. J. Environ. Eng. Sci. 2019, 5, 2121–2135. [Google Scholar]
- Beamer, P.I.; Guerra, S.; Lothrop, N.; Stern, D.A.; Lu, Z.; Billheimer, D.; Halonen, M.; Wright, A.L.; Martinez, F.D. B46 Health effects of air pollution and nanoparticles: Childhood Cc16 Levels Are Associated with Diesel Exposure At Birth. Am. J. Respir. Crit. Care Med. 2015, 191, 1. [Google Scholar]
- Dhyani, R.; Sharma, N.; Advani, M. Estimation of fuel loss and spatial-temporal dispersion of vehicular pollutants at a signalized intersection in Delhi City, India. WIT Trans. Ecol. Environ. 2019, 236, 233–243. [Google Scholar]
- Perry, S.G. CTDMPLUS: A dispersion model for sources near complex topography. Part I: Technical formulations. J. Appl. Meteorol. 1992, 31, 633–645. [Google Scholar] [CrossRef]
- Bowers, J.; Anderson, A.J.; Huber, A. Evaluation study of the industrial source complex (ISC) dispersion model. Paper 81.20. 4. In Proceedings of the 74th APCA Annual Meeting, Philadelphia, PA, USA, 21–26 June 1981. [Google Scholar]
- Chen, M.-H.; Yuan, C.-S.; Wang, L.-C. A feasible approach to quantify fugitive VOCs from petrochemical processes by integrating open-path fourier transform infrared spectrometry measurements and industrial source complex (ISC) dispersion model. Aerosol Air Qual. Res. 2015, 15, 1110–1117. [Google Scholar] [CrossRef]
- Iodice, P.; Senatore, A. Appraisal of pollutant emissions and air quality state in a critical I talian region: Methods and results. Environ. Prog. Sustain. Energy 2015, 34, 1497–1505. [Google Scholar] [CrossRef]
- Iodice, P.; Senatore, A. Air pollution and air quality state in an Italian National Interest Priority Site. Part 2: The pollutant dispersion. Energy Procedia 2015, 81, 637–643. [Google Scholar] [CrossRef]
- Roy, D.; Singh, G.; Yadav, P. Identification and elucidation of anthropogenic source contribution in PM10 pollutant: Insight gain from dispersion and receptor models. J. Environ. Sci. 2016, 48, 69–78. [Google Scholar] [CrossRef] [PubMed]
- Esbrí, J.M.; López-Berdonces, M.A.; Fernández-Calderón, S.; Higueras, P.; Díez, S. Atmospheric mercury pollution around a chlor-alkali plant in Flix (NE Spain): An integrated analysis. Environ. Sci. Pollut. Res. 2015, 22, 4842–4850. [Google Scholar] [CrossRef] [PubMed]
- Muriel-García, M.; Cerón-Bretón, R.M.; Cerón-Bretón, J.G. Air pollution in the Gulf of Mexico. Open J. Ecol. 2016, 6, 32. [Google Scholar] [CrossRef]
- Rodhe, H. Some aspects of the use of air trajectories for the computation of large-scale dispersion and fallout patterns. In Advances in Geophysics; Elsevier: Amsterdam, The Netherlands, 1975; Volume 18, pp. 95–109. [Google Scholar]
- Rodhe, H. A study of the sulfur budget for the atmosphere over Northern Europe. Tellus 1972, 24, 128–138. [Google Scholar] [CrossRef]
- Inthavong, K.; Tian, L.; Tu, J. Lagrangian particle modelling of spherical nanoparticle dispersion and deposition in confined flows. J. Aerosol Sci. 2016, 96, 56–68. [Google Scholar] [CrossRef]
- Monin, A. Smoke propagation in the surface layer of the atmosphere. In Advances in Geophysics; Elsevier: Amsterdam, The Netherlands, 1959; Volume 6, pp. 331–343. [Google Scholar]
- Boughton, B.; Delaurentis, J.; Dunn, W. A stochastic model of particle dispersion in the atmosphere. Bound. Layer Meteorol. 1987, 40, 147–163. [Google Scholar] [CrossRef]
- Kunkel, B. User’s Guide for the Air Force Toxic Chemical Dispersion Model (AFTOX); Interim report, October 1985–December 1987; Air Force Geophysics Lab: Hanscom Air Force Base, MA, USA, 1988. [Google Scholar]
- Abbasi, T.; Tauseef, S.; Suganya, R.; Abbasi, S. Types of accidents occurring in chemical process industries and approaches to their modeling. Int. J. Eng. Sci. Math 2017, 6, 424–455. [Google Scholar]
- Elperin, T.; Fominykh, A.; Krasovitov, B. Effect of raindrop size distribution on scavenging of aerosol particles from Gaussian air pollution plumes and puffs in turbulent atmosphere. Process. Saf. Environ. Prot. 2016, 102, 303–315. [Google Scholar] [CrossRef]
- Tomasi, E.; Giovannini, L.; Falocchi, M.; Zardi, D.; Antonacci, G.; Ferrero, E.; Bisignano, A.; Alessandrini, S.; Mortarini, L. Dispersion Modeling Over Complex Terrain in the Bolzano Basin (IT): Preliminary Results from a WRF-CALPUFF Modeling System. In Proceedings of the 35th International Technical Meeting on Air Pollution Modelling and Its Application, Crete, Greece, 3–7 October 2016; pp. 157–161. [Google Scholar]
- Exponent Engineering and Science Consulting. CALPUFF Modeling System. Available online: http://www.src.com/ (accessed on 3 July 2022).
- Yaacof, N.; Qamaruzzaman, N.; Yusup, Y. Comparison method of odour impact evaluation using calpuff dispersion modelling and on-site odour monitoring. Eng. Herit. J. 2017, 1, 1–5. [Google Scholar] [CrossRef]
- Çetin Doğruparmak, Ş.; Pekey, H.; Arslanbaş, D. Odor dispersion modeling with CALPUFF: Case study of a waste and residue treatment incineration and utilization plant in Kocaeli, Turkey. Environ. Forensics 2018, 19, 79–86. [Google Scholar] [CrossRef]
- Formentin, G. Estimating the Dispersion of Shipping Emissions from Fremantle Port, Western Australia; Murdoch University: Perth, Australia, 2017. [Google Scholar]
- García, G.F.; Álvarez, H.B.; Echeverría, R.S.; de Alba, S.R.; Rueda, V.M.; Dosantos, E.C.; Cruz, G.V. Spatial and temporal variability of atmospheric mercury concentrations emitted from a coal-fired power plant in Mexico. J. Air Waste Manag. Assoc. 2017, 67, 973–985. [Google Scholar] [CrossRef] [PubMed]
- Sagan, V.; Pasken, R.; Zarauz, J.; Krotkov, N. SO2 trajectories in a complex terrain environment using CALPUFF dispersion model, OMI and MODIS data. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 99–109. [Google Scholar] [CrossRef]
- Andrén, A. A meso-scale plume dispersion model. Preliminary evaluation in a heterogeneous area. Atmos. Environ. Part A. Gen. Top. 1990, 24, 883–896. [Google Scholar] [CrossRef]
- Bahlali, M.; Dupont, E.; Carissimo, B. Adaptation of the Lagrangian module of a CFD code for atmospheric dispersion of pollutants in complex urban geometries and comparison with existing Eulerian results. In Proceedings of the 18th International conference on Harmonisation within Atmospheric Dispersion Modelling for Regulatory Purposes, Bologna, Italy, 9–12 October 2017. [Google Scholar]
- Bonafé, G.; Montanari, F.; Stel, F. A hybrid Eulerian-Lagrangian-statistical approach to evaluate air quality in a mixed residential-industrial environment. Int. J. Environ. Pollut. 2018, 64, 246–264. [Google Scholar] [CrossRef]
- Brusca, S.; Famoso, F.; Lanzafame, R.; Mauro, S.; Messina, M.; Strano, S. PM10 Dispersion Modeling by means of CFD 3D and Eulerian–Lagrangian models: Analysis and comparison with experiments. Energy Procedia 2016, 101, 329–336. [Google Scholar] [CrossRef]
- Bahlali, M.L.; Dupont, E.; Carissimo, B. A hybrid CFD RANS/Lagrangian approach to model atmospheric dispersion of pollutants in complex urban geometries. Int. J. Environ. Pollut. 2018, 64, 74–89. [Google Scholar] [CrossRef]
- Brown, M.J.; Gowardhan, A.A.; Nelson, M.A.; Williams, M.D.; Pardyjak, E.R. QUIC transport and dispersion modelling of two releases from the Joint Urban 2003 field experiment. Int. J. Environ. Pollut. 2013, 52, 263–287. [Google Scholar] [CrossRef]
- Tominaga, Y.; Stathopoulos, T. CFD simulations of near-field pollutant dispersion with different plume buoyancies. Build. Environ. 2018, 131, 128–139. [Google Scholar] [CrossRef]
- Sanchez, B.; Santiago, J.-L.; Martilli, A.; Palacios, M.; Kirchner, F. CFD modeling of reactive pollutant dispersion in simplified urban configurations with different chemical mechanisms. Atmos. Chem. Phys. 2016, 16, 12143–12157. [Google Scholar] [CrossRef]
- Soulhac, L.; Nguyen, C.V.; Volta, P.; Salizzoni, P. The model SIRANE for atmospheric urban pollutant dispersion. PART III: Validation against NO2 yearly concentration measurements in a large urban agglomeration. Atmos. Environ. 2017, 167, 377–388. [Google Scholar] [CrossRef]
- Soulhac, L.; Salizzoni, P.; Cierco, F.-X.; Perkins, R. The model SIRANE for atmospheric urban pollutant dispersion; part I, presentation of the model. Atmos. Environ. 2011, 45, 7379–7395. [Google Scholar] [CrossRef]
- Salem, N.B.; Garbero, V.; Salizzoni, P.; Lamaison, G.; Soulhac, L. Modelling pollutant dispersion in a street network. Bound.-Layer Meteorol. 2015, 155, 157–187. [Google Scholar] [CrossRef]
- Wang, A.; Fallah-Shorshani, M.; Xu, J.; Hatzopoulou, M. Characterizing near-road air pollution using local-scale emission and dispersion models and validation against in-situ measurements. Atmos. Environ. 2016, 142, 452–464. [Google Scholar] [CrossRef]
- Padilla, C.; Kihal-Talantikit, W.; Vieira, V.; Deguen, S. City-specific spatiotemporal infant and neonatal mortality clusters: Links with socioeconomic and air pollution spatial patterns in France. Int. J. Environ. Res. Public Health 2016, 13, 624. [Google Scholar] [CrossRef]
- Ouidir, M.; Giorgis-Allemand, L.; Lyon-Caen, S.; Morelli, X.; Cracowski, C.; Pontet, S.; Pin, I.; Lepeule, J.; Siroux, V.; Slama, R. Estimation of exposure to atmospheric pollutants during pregnancy integrating space–time activity and indoor air levels: Does it make a difference? Environ. Int. 2015, 84, 161–173. [Google Scholar] [CrossRef]
- Morelli, X.; Rieux, C.; Cyrys, J.; Forsberg, B.; Slama, R. Air pollution, health and social deprivation: A fine-scale risk assessment. Environ. Res. 2016, 147, 59–70. [Google Scholar] [CrossRef]
- Kim, Y.; Wu, Y.; Seigneur, C.; Roustan, Y. Multi-scale modeling of urban air pollution: Development and application of a Street-in-Grid model (v1. 0) by coupling MUNICH (v1. 0) and Polair3D (v1. 8.1). Geosci. Model Dev. 2018, 11, 611–629. [Google Scholar] [CrossRef]
- Hertel, O.; Berkowicz, R.; Larssen, S. The operational street pollution model (OSPM). In Air Pollution Modeling and Its Application VIII; Springer: Cham, Switzerland, 1991; pp. 741–750. [Google Scholar]
- Ciarelli, G.; Aksoyoglu, S.; Crippa, M.; Jimenez, J.-L.; Nemitz, E.; Sellegri, K.; Äijälä, M.; Carbone, S.; Mohr, C.; O’Dowd, C. Evaluation of European air quality modelled by CAMx including the volatility basis set scheme. Atmos. Chem. Phys. 2016, 16, 10313–10332. [Google Scholar] [CrossRef]
- Finzi, G.; Nunnari, G. Air Quality Forecast and Alarm Systems. Chapter 16A. In Air Quality Modelling—Theories, Methodologies, Computational Techniques and Available Databases and Software; Zannetti, P., Ed.; AWMA: Pittsburgh, PA, USA, 2005; Volume II, pp. 397–452. [Google Scholar]
- Shaban, K.B.; Kadri, A.; Rezk, E. Urban air pollution monitoring system with forecasting models. IEEE Sens. J. 2016, 16, 2598–2606. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, Y.; Lu, W.; Wang, H.; Huang, Q. ModOdor: 3D numerical model for dispersion simulation of gaseous contaminants from waste treatment facilities. Environ. Model. Softw. 2019, 113, 1–19. [Google Scholar] [CrossRef]
Figure 1.
A representation of a Gaussian plume model. Image by Milton Beychok; reproduced under Creative Commons 3.0 licence.
Figure 1.
A representation of a Gaussian plume model. Image by Milton Beychok; reproduced under Creative Commons 3.0 licence.


{kind=link}
Table 1.
Some possible data inputs for a dispersion model.
| Emission Characteristics | Source Characteristics | Location Characteristics | Meteorological Characteristics |
|---|---|---|---|
| Pollutants | Source types (e.g., point, line, area, volume) | Location (e.g., urban vs. rural) | Temperature |
| Pollutant characteristics | Source dimensions (if applicable) | Terrain (simple vs. complex) | Wind speed |
| Distribution of source(s) | Volume emission rates | Surface roughness (z0) | Wind direction |
| Emission rates | Temperature | Interfaces of land & water (if any) | Atmospheric stability/turbulence |
| Moisture content | Existing (background) pollutant levels | Solar radiation (particularly important for photochemical modelling) | |
| Presence of buildings or other infrastructure | Cloud cover | ||
| Moisture |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Johnson, J.B. An Introduction to Atmospheric Pollutant Dispersion Modelling. Environ. Sci. Proc. 2022, 19, 18. https://doi.org/10.3390/ecas2022-12826
AMA Style
Johnson JB. An Introduction to Atmospheric Pollutant Dispersion Modelling. Environmental Sciences Proceedings. 2022; 19(1):18. https://doi.org/10.3390/ecas2022-12826
Chicago/Turabian StyleJohnson, Joel B. 2022. "An Introduction to Atmospheric Pollutant Dispersion Modelling" Environmental Sciences Proceedings 19, no. 1: 18. https://doi.org/10.3390/ecas2022-12826