
Breaking the One-Meter Accuracy Level with Smartphone GNSS Data †


Abstract
:1. Introduction
2. Challenges
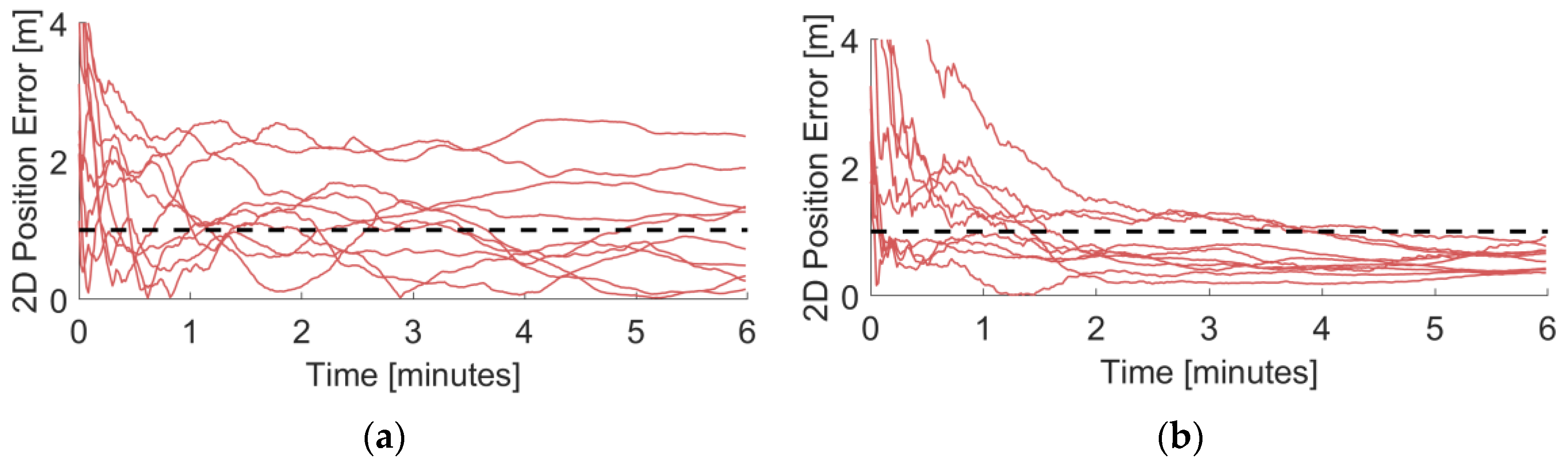
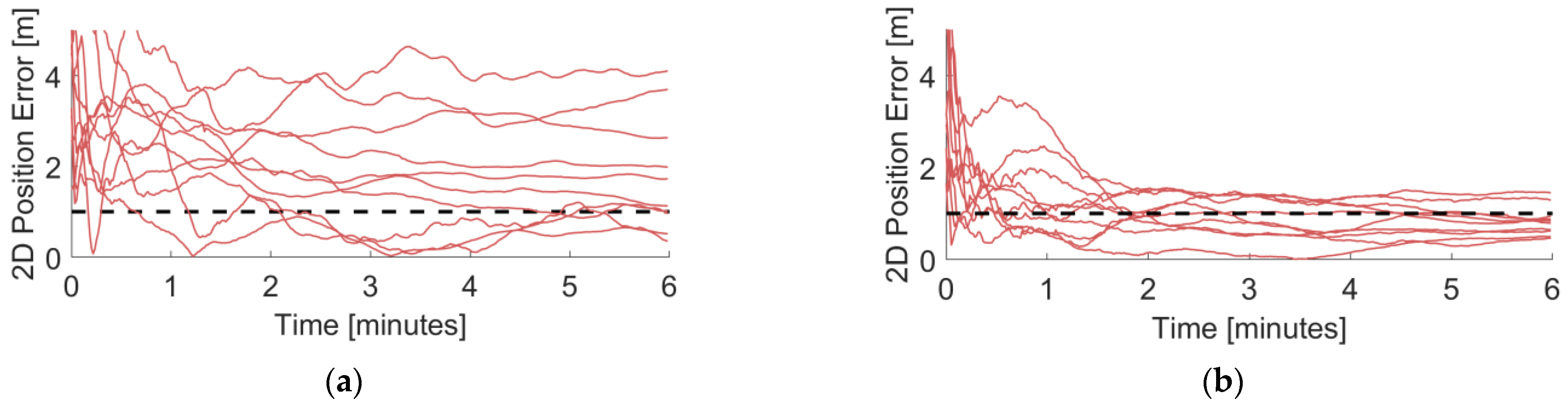
3. Results
4. Discussion
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zangenehnejad, F.; Gao, Y. GNSS Smartphones Positioning: Advances, Challenges, Opportunities, and Future Perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef] [PubMed]
- European GNSS Supervisory Authority. Using GNSS Raw Measurements on Android Devices: White Paper; Publications Office: Luxembourg, 2017. [Google Scholar]
- Wang, L.; Li, Z.; Wang, N.; Wang, Z. Real-Time GNSS Precise Point Positioning for Low-Cost Smart Devices. GPS Solut. 2021, 25, 69. [Google Scholar] [CrossRef]
- Everett, T.; Taylor, T.; Lee, D.-K.; Akos, D.M. Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements. Sensors 2022, 22, 3825. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, T. Precise Position Estimation Using Smartphone Raw GNSS Data Based on Two-Step Optimization. Sensors 2023, 23, 1205. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality Assessment of GNSS Observations from an Android N Smartphone and Positioning Performance Analysis Using Time-Differenced Filtering Approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality Analysis of Multi-GNSS Raw Observations and a Velocity-Aided Positioning Approach Based on Smartphones. Adv. Space Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Wanninger, L.; Heßelbarth, A. GNSS Code and Carrier Phase Observations of a Huawei P30 Smartphone: Quality Assessment and Centimeter-Accurate Positioning. GPS Solut. 2020, 24, 64. [Google Scholar] [CrossRef]
- Kouba, J.; Lahaye, F.; Tétreault, P. Precise Point Positioning. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 723–751. ISBN 978-3-319-42928-1. [Google Scholar]
- Choy, S.; Bisnath, S.; Rizos, C. Uncovering Common Misconceptions in GNSS Precise Point Positioning and Its Future Prospect. GPS Solut. 2017, 21, 13–22. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS Carrier-Phase Ambiguities in Precise Point Positioning (PPP) with Daily Observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Glaner, M.; Weber, R. PPP with Integer Ambiguity Resolution for GPS and Galileo Using Satellite Products from Different Analysis Centers. GPS Solut. 2021, 25, 102. [Google Scholar] [CrossRef]
- Shinghal, G.; Bisnath, S. Conditioning and PPP Processing of Smartphone GNSS Measurements in Realistic Environments. Satell. Navig. 2021, 2, 10. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Wang, N.; Li, R.; Liu, A. Real-Time GNSS Precise Point Positioning with Smartphones for Vehicle Navigation. Satell. Navig. 2022, 3, 19. [Google Scholar] [CrossRef]
- Glaner, M.F.; Weber, R. An Open-Source Software Package for Precise Point Positioning: raPPPid. GPS Solut. 2023, 27, 174. [Google Scholar] [CrossRef]
- Glaner, M.F. Towards Instantaneous PPP Convergence Using Multiple GNSS Signals. Ph.D. Thesis, TU Wien, Vienna, Austria, 2022. [Google Scholar]
- Crowdsourcing GNSS features of Android Devices. Available online: https://barbeau.medium.com/crowdsourcing-gnss-capabilities-of-android-devices-d4228645cf25 (accessed on 4 April 2023).
- GPSTest Database. Available online: https://docs.google.com/spreadsheets/d/1jXtRCoEnnFNWj6_oFlVWflsf-b0jkfZpyhN-BXsv7uo/edit#gid=0 (accessed on 4 April 2023).
- Raw GNSS Measurements. Available online: https://developer.android.com/guide/topics/sensors/gnss (accessed on 4 April 2023).
- GNSS, Interrupted: The Hidden Android Setting You Need to Know. Available online: https://barbeau.medium.com/gnss-interrupted-the-hidden-android-setting-you-need-to-know-d812d28a3821 (accessed on 4 April 2023).
- Zangenehnejad, F.; Jiang, Y.; Gao, Y. GNSS Observation Generation from Smartphone Android Location API: Performance of Existing Apps, Issues and Improvement. Sensors 2023, 23, 777. [Google Scholar] [CrossRef] [PubMed]
- PPP-WIZARD: Daily Products. Available online: http://www.ppp-wizard.net/daily.html (accessed on 11 April 2023).
- Galileo High Accuracy Service (HAS). Available online: https://www.gsc-europa.eu/galileo/services/galileo-high-accuracy-service-has (accessed on 4 April 2023).
- Magnet, N. Giomo a Robust Modelling Approach of Ionospheric Delays for GNSS Real-Time Positioning Applications. Ph.D. Thesis, TU Wien, Vienna, Austria, 2019. [Google Scholar]
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined Discrete and Empirical Troposphere Mapping Functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef] [PubMed]
- Landskron, D.; Böhm, J. Refined Discrete and Empirical Horizontal Gradients in VLBI Analysis. J. Geod. 2018, 92, 1387–1399. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smartphones | Samsung Galaxy S23+, Google Pixel 7 |
| Date and period | 4 and 19 April 2023; 60 min in total |
| Observation interval | 1 s, reset of the solution every 6 min |
| Processed measurements | GPS (C1C + C5Q), GLONASS (C1C), Galileo (C1C + C5X), BeiDou (C2I) |
| Satellite orbits, clocks, and biases | Real-time corrections stream from CNES [22] or the Galileo HAS [23] |
| Processing mode | Static, quasi-real-time |
| Observation model | Uncombined model with ionospheric constraint |
| Raw observation noise | Code: 1 m/7 m, phase: NaN/0.01 m, ionosphere: 3 m |
| Observation weighting | , with a = 20 or 10 |
| Ionosphere model | GIOMO predicted [24] as ionospheric constraint, constant/released after 1 min |
| Troposphere model | GPT3 [25,26], ZWD not estimated/estimated |
| Correction models | Solid Earth tides, relativistic effects |
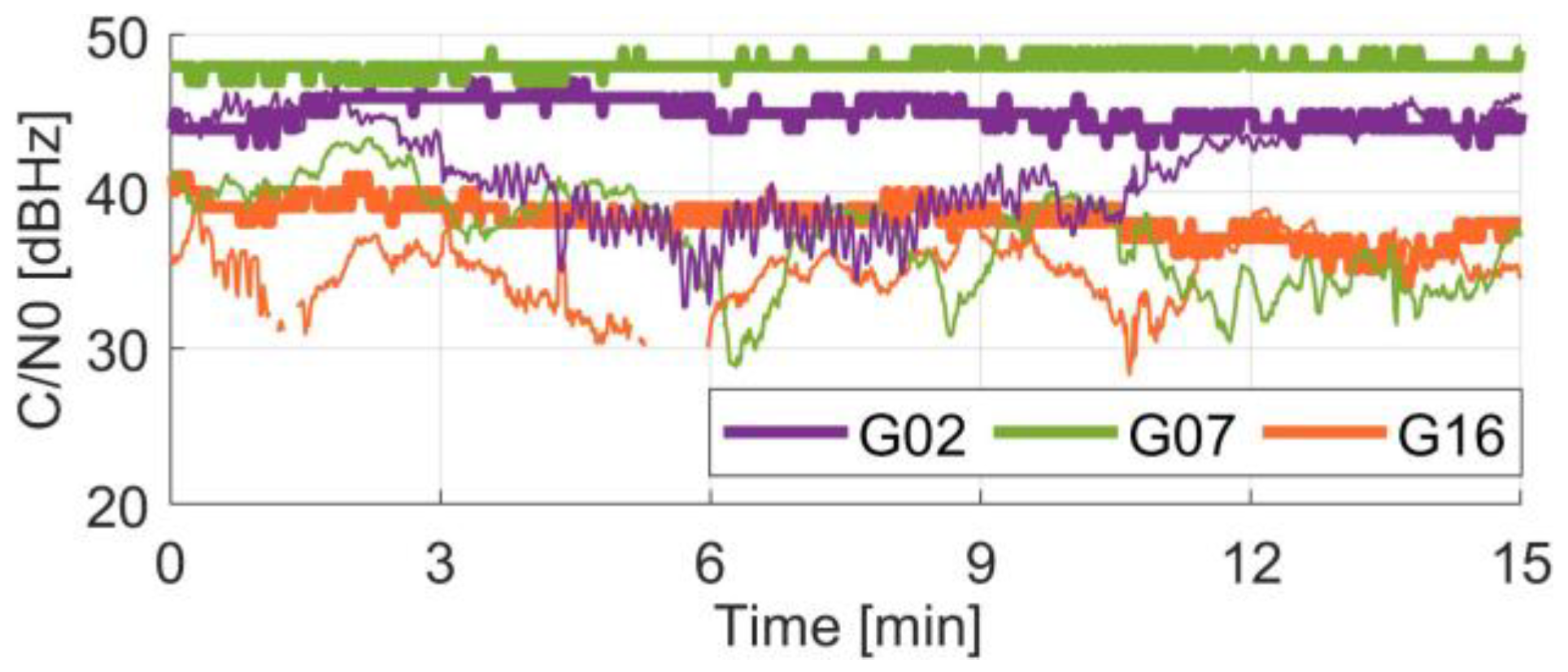
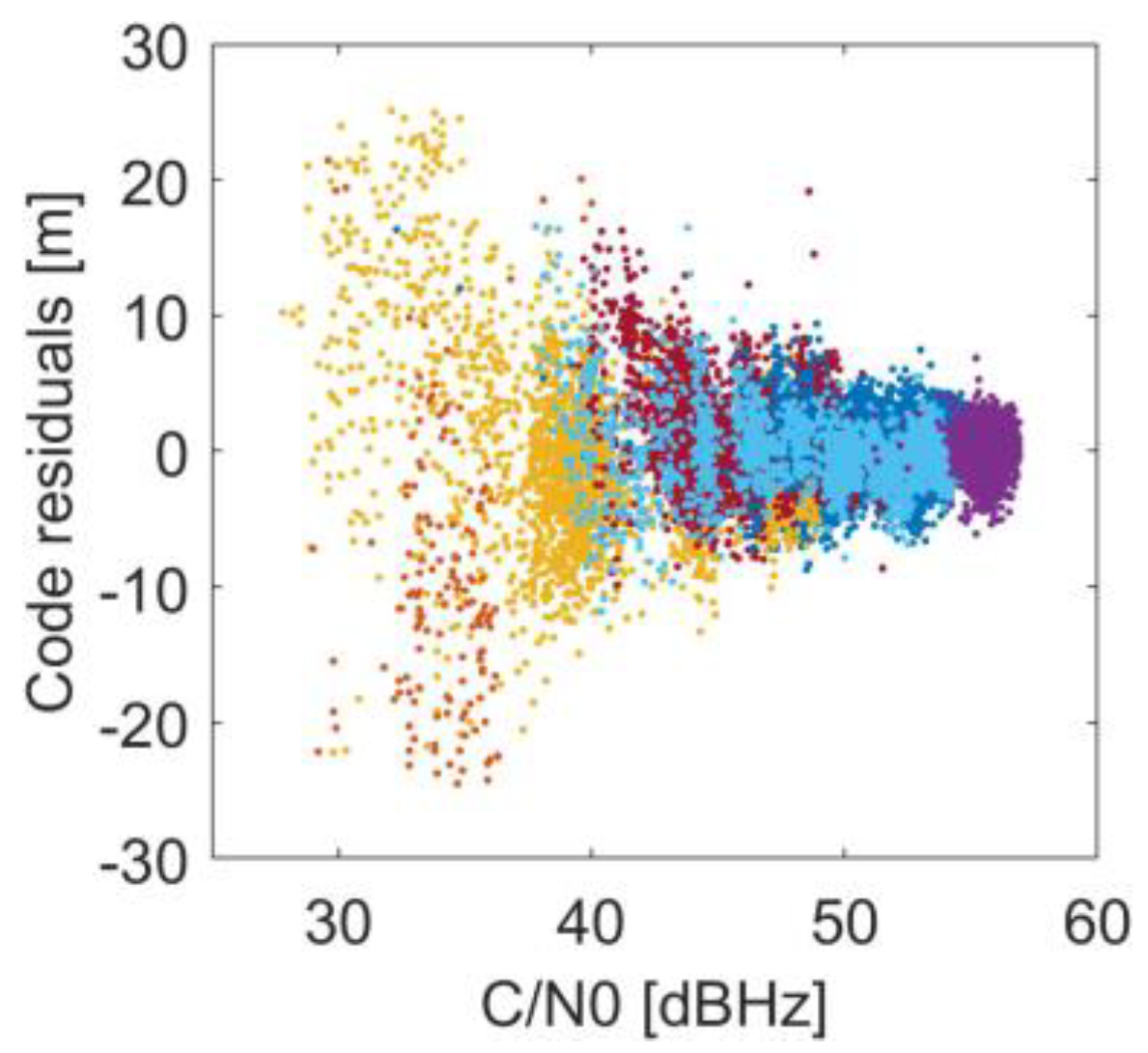
| Satellite exclusion criteria | C/N0 < 20 dB.Hz or elevation < 10° |
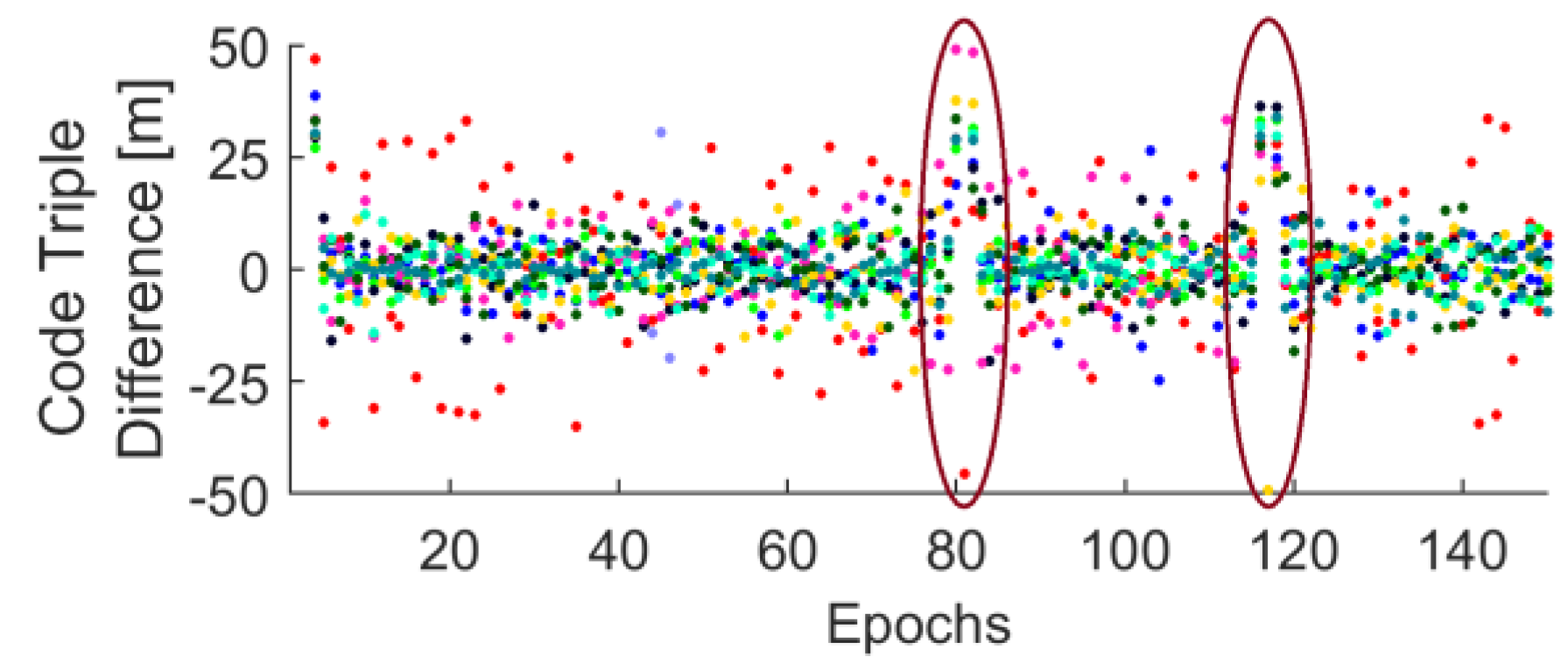
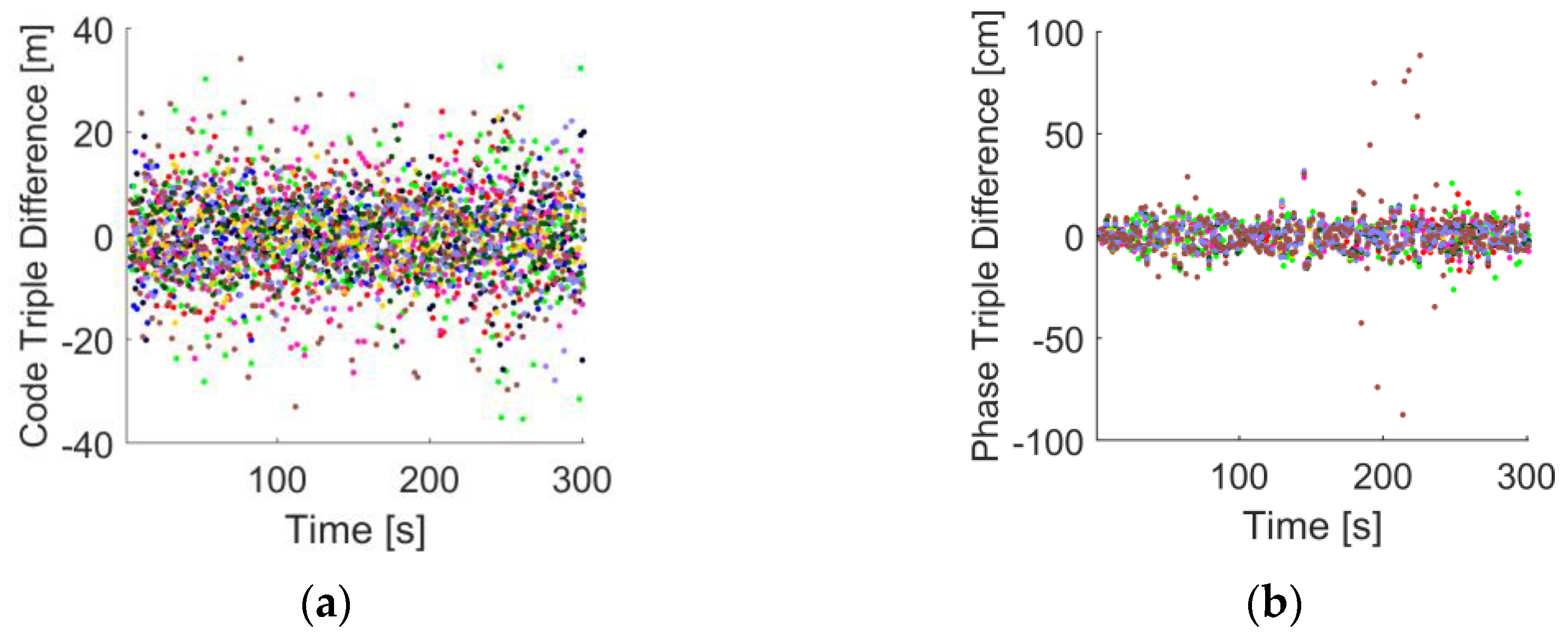
| Data quality checks (thresholds) | Observed minus computed (code: 25 m, phase 5 m), code triple-time difference (1 m), cycle-slip detection with Doppler (0.7 cy) |
| Smartphone | Median 2D Position Error [cm] | Mean 2D Position Error after 6 min [cm] | Mean 3D Position Error after 6 min [cm] | Mean Convergence [min] | Converged [%] |
|---|---|---|---|---|---|
| Samsung Galaxy S23+ | 112.5 | 101.4 | 258.8 | 2.33 | 50 |
| Google Pixel 7 | 66.5 | 58.7 | 108.8 | 1.70 | 100 |
| Smartphone | Median 2D Position Error [cm] | Mean 2D Position Error after 6 min [cm] | Mean 3D Position Error after 6 min [cm] | Mean Convergence [min] | Converged [%] |
|---|---|---|---|---|---|
| Samsung Galaxy S23+ | 190.3 | 180.9 | 384.3 | 3.96 | 30 |
| Google Pixel 7 | 99.9 | 84.0 | 261.3 | 2.63 | 80 |
| Smartphone | Median 2D Position Error [cm] | Mean 2D Position Error after 6 min [cm] | Mean 3D Position Error after 6 min [cm] | Mean Convergence [min] | Converged [%] |
|---|---|---|---|---|---|
| Samsung Galaxy S23+ | 182.6 | 133.9 | 245.6 | 3.05 | 60 |
| Google Pixel 7 | 93.9 | 79.0 | 208.4 | 2.25 | 70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glaner, M.F.; Weber, R. Breaking the One-Meter Accuracy Level with Smartphone GNSS Data. Eng. Proc. 2023, 54, 16. https://doi.org/10.3390/ENC2023-15465
Glaner MF, Weber R. Breaking the One-Meter Accuracy Level with Smartphone GNSS Data. Engineering Proceedings. 2023; 54(1):16. https://doi.org/10.3390/ENC2023-15465
Chicago/Turabian StyleGlaner, Marcus Franz, and Robert Weber. 2023. "Breaking the One-Meter Accuracy Level with Smartphone GNSS Data" Engineering Proceedings 54, no. 1: 16. https://doi.org/10.3390/ENC2023-15465