1. Introduction
Microfluidics, defined as the science of systems that process small amounts of fluid in channels characterized by a size from tens to hundreds of micrometers [
1], offers several advantages for the fabrication of biomedical devices for diagnostic and therapeutic uses. These features include: fabrication of low-cost and disposable devices, use of small volumes of fluids and chemical reagents, good throughput, in situ real-time observation, and integration on the same device of different technologies (fluidic system, manipulation technology, chemical reaction spots, particle counting system, etc.). One recently studied technology to cover this kind of microfluidic device is known as Lab-on-a-Chip [
2], used in the biomedical and biochemical research fields for fast and versatile testing [
3].
The precise manipulation of microparticles (e.g., polystyrene microbeads, single cells, or their aggregation) is an important feature to improve the studies in the biomedical fields [
4]. Several solutions were studied exploiting microfluidic technologies for particle handling: hydrodynamic, acoustic, electrical, optical, and magnetic techniques [
5,
6,
7]. Among them, a non-contact and biocompatible solution is the acoustic manipulation technique. In particular, the acoustic-based technique is an active force, due to the use of externally generated ultrasound waves only exploiting the mechanical properties of particles for manipulation with no need for additional markers [
8]. Two main phenomena are induced by an acoustic pressure field generated within a microchannel: acoustophoresis (literally, acoustic migration) and acoustic streaming (a steady flow effect generated in a fluid interacting with acoustic waves). Acoustically induced particle motion, in particular, is obtained by generating a standing pressure field within the microfluidic channel. The microparticles released into the fluid will be balanced between two forces: the acoustophoretic radiation force (ARF), which is proportional to the size, density, and compressibility of the particles, and the Stokes drag force, induced by the fluid flow [
9].
Two main principles are used to transmit an acoustic field to the fluid contained in a microchannel: bulk acoustic wave (BAW)-based [
10] and surface acoustic wave (SAW)-based devices. SAWs can be obtained by precisely patterning the surface of a piezoelectric substrate (e.g., lithium niobate, LiNbO
3) with metallic finger electrodes, in structures called IDTs. By applying an AC voltage to the electrode, the inverse piezoelectric effect causes the generation and propagation of surface acoustic waves in the form of Rayleigh waves in the substrate. The surface waves are finally transmitted to the fluid contained in a microchannel on the surface of the substrate, in the form of pressure waves [
11]. Two, or more, counter-propagating waves can constructively interact to generate a standing surface acoustic wave (SSAW). The resulting standing pressure field features fixed pressure nodes (of zero pressure) and antinodes (at maximum wave amplitude). The particle displacement direction is defined by its physical properties: solid particles are typically displaced towards the pressure nodes [
12].
The acoustic manipulation technique can be exploited for different applications. Examples can be found in the literature related to focusing, sorting [
13], patterning [
14], and controlling the displacement of particles, cells, and organisms [
15].
In this work, a digital solution of the acoustofluidic problem is developed by modelling a simple microfluidic SSAW-based device. To find the best solution in terms of constructive wave interference, pressure field transmission, and distribution within the fluid domain, a parametric investigation was performed on varying channel geometries. Then, the model was used to validate the analyses in terms of particle focusing by considering polystyrene spherical particles with different diameters. For applications towards biological cell focusing (for example, for cell number counting), size-based sorting of circulating tumor cells (CTCs) can be achieved exploiting these solutions, see, e.g., [
16].
2. Numerical Model
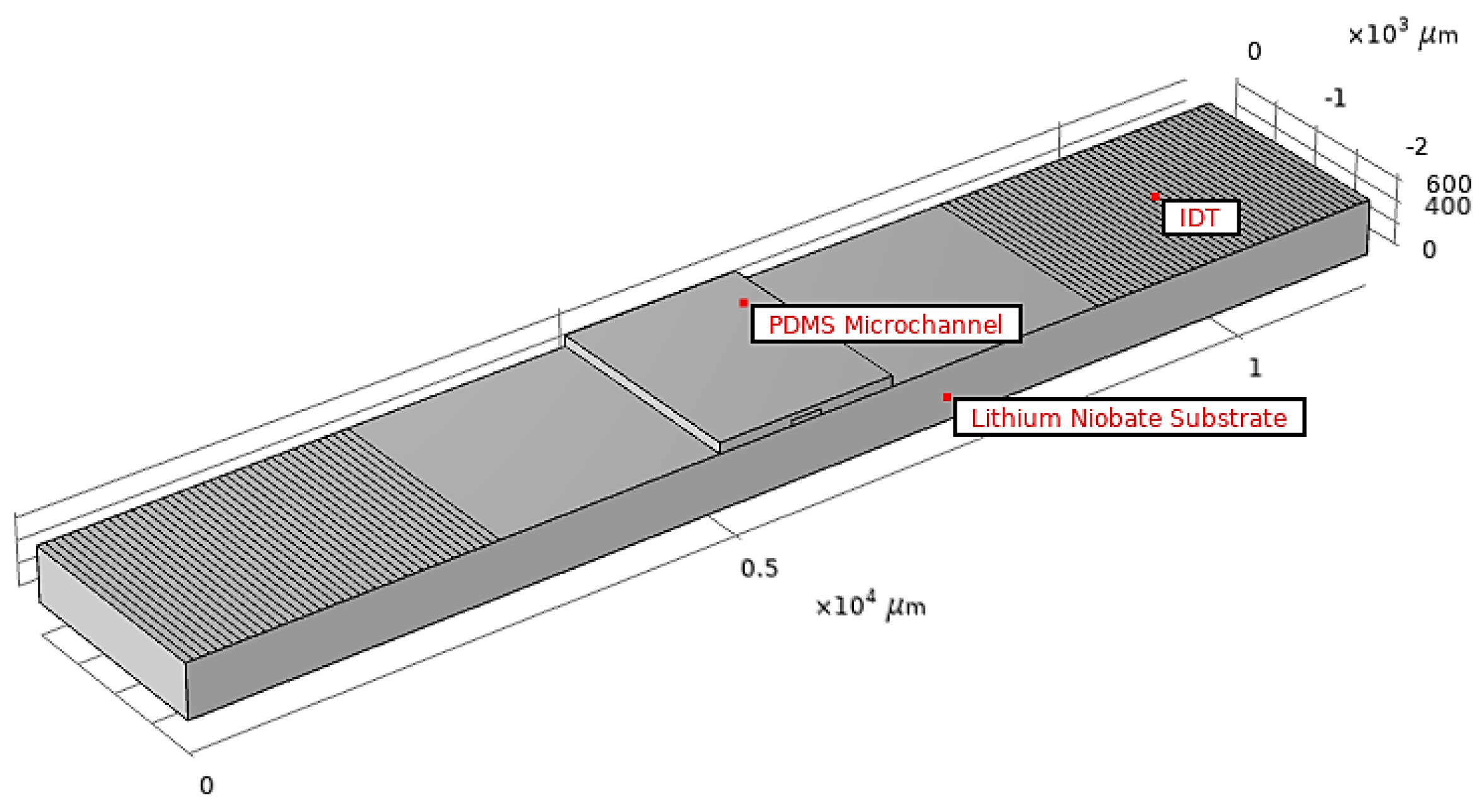
The SAW-based system is composed of a 500 µm thick piezoelectric substrate, on which a polydimethylsiloxane (PDMS) straight microchannel is placed. Two IDTs are patterned on the surface of the substrate, near the sides of the microchannel. This positioning leads to the generation of two counter-propagating surface waves, which constructively interfere in the PDMS channel to generate an SSAW. The IDTs are made of 15 couples of 70 µm wide gold finger electrodes. As the SAW wavelength is equal to the pitch of the IDT (width of two electrodes + width of two spaces between the electrodes), its value is thus 280 µm (70·2 + 70·2). Therefore, the wavelength of the surface waves can be selected by designing the IDTs. To investigate the sensitivity of the pressure field distribution within the fluid domain contained in the microchannel, a parametric study on the dimensions of the microchannel was carried out. The particles dispersed in the fluid were assumed to be composed of polystyrene and have a spherical shape, with a diameter of 2, 4, 6, 8, and 10 µm. All the dimensions of the device are reported in
Table 1 and in
Figure 1.
A multi-physics finite element model was set to solve the acoustophoretic problem. A linear piezoelectric constitutive model was adopted to govern the response of the piezoelectric substrate to the stimuli, according to:
where, due to Voigt notation:
is the stress vector;
is the elasticity matrix;
is the strain vector;
is the piezoelectric coupling matrix;
is the electric field vector,
is the electric displacement;
is the permittivity matrix; the superscript
denotes the transpose.
The harmonic acoustic field in the fluid is governed by the Helmholtz wave equation, which accounts for: the acoustic pressure
; the density
of the fluid (water); the speed of sound
in the fluid; the angular wave frequency; the acoustic attenuation coefficient associated with the fluid [
17]. The lateral and bottom boundaries of the substrate were set as low reflection; this was chosen to avoid interferences between the propagating and the reflected waves. The upper surface of the substrate was instead set free, not to constrain the propagation of the waves.
The motion of each particle in the fluid was governed by Newton’s second law, with the ARF defined as:
where:
is the radius of the particles;
and
are the monopole and dipole scattering coefficients of the particles, which depend on the density and compressibility of both particles and fluid [
12];
is the fluid compressibility;
and
, respectively, denote the average pressure and velocity fields generated by the acoustic waves. The fluid velocity was set to be
at the inlet. The particles were also subjected to the Stokes drag force, depending on the dynamic viscosity of the medium and the fluid velocity.
3. Results and Discussion
The generation and propagation of waves, with the final development of the standing surface wave, were preliminarily studied. A frequency-dependent investigation was performed to determine the resonance frequency of the piezoelectric substrate. A preliminary calculation was carried out by using the formulation reported in [
18], and referring to the Rayleigh waves only. The relevant frequency was found to be
. Next, the frequency in the analyses was swept in the range 11.5–12 MHz. The best result in terms of surface vertical displacement was found for
, see
Figure 2.
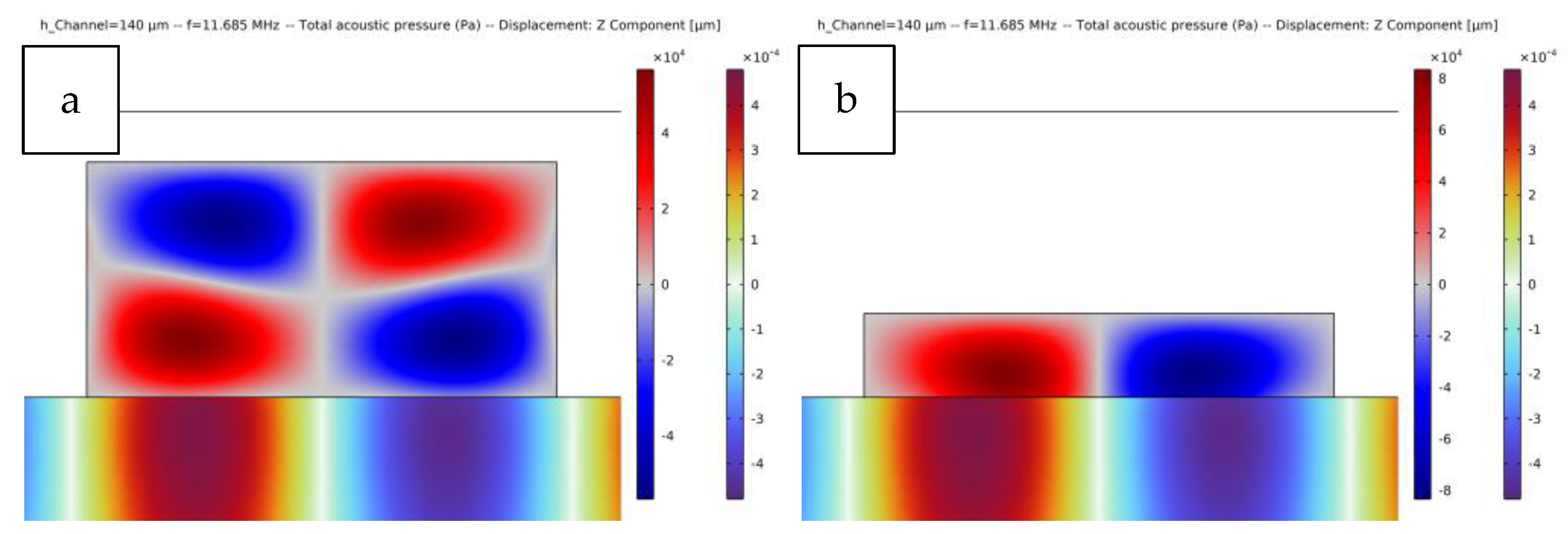
A parametric sweep on the dimensions of the microchannel was next performed, to study how they affect the pressure field within the fluid. The PDMS was modeled as a linear elastic solid, and some results are reported in
Figure 3, in terms of the standing pressure field. It can be seen that the pressure distribution was regular and featured a central pressure node, sided by two antinodes (the red and blue regions of the plots). The wave transmission mechanism can be recognized in
Figure 3b, where both the surface displacement and the pressure field are plotted, referring to a 50 µm thick channel. In
Figure 3a, results refer to a thickness of 140 µm, to show that the pressure wavelength is around 140 µm, as set in the analyses. The following results refer to a 50 µm thick channel.
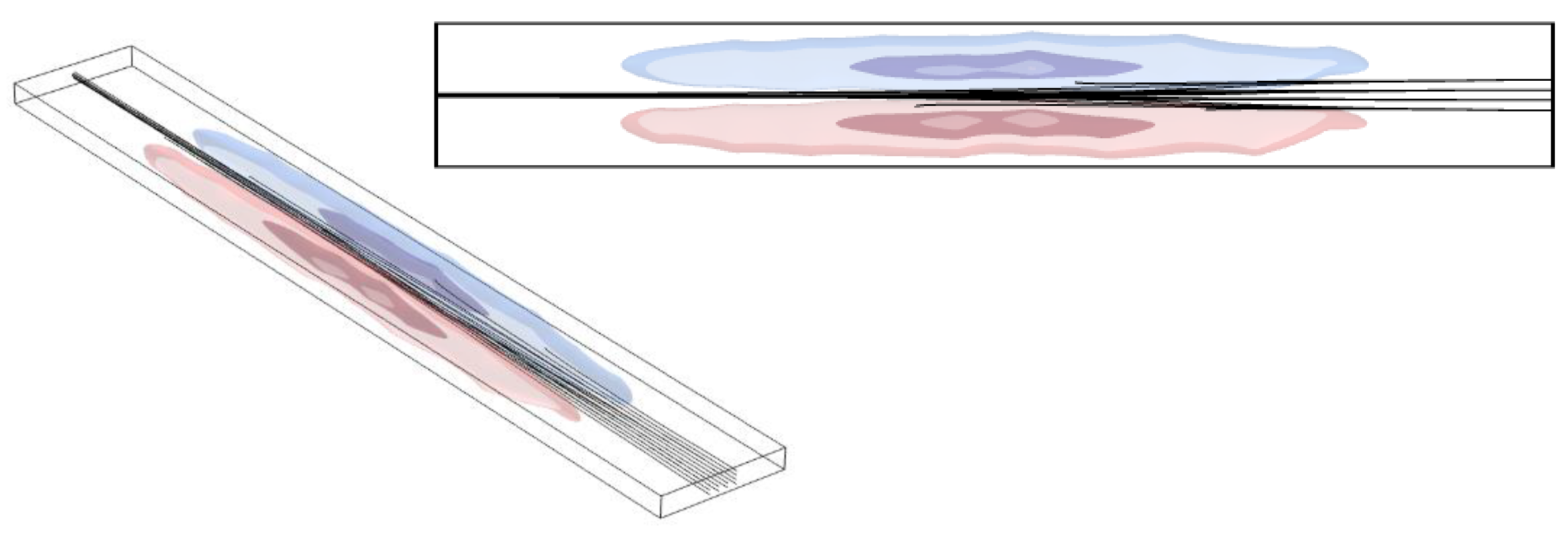
A 3D view of the acoustic pressure is reported in
Figure 4. The shape of the pressure field was similar to two clouds corresponding to the antinode regions, with a pressure node at mid-width. This solution led to the simulation of the trajectories of the microparticles in the channel under the effects of the ARF and of the drag force. The plots of the trajectories in
Figure 5 show that the particles were actually displaced towards the pressure nodes, allowing their focalization in the line/plane of the pressure node.
To highlight the possibility of sorting particles of different sizes due to the ARF, particles were released at the inlet for five increasing values of the diameter: 2, 4, 6, 8, and 10 µm.
Figure 6 shows the trajectories of all the particles projected onto the cross-section of the microchannel. It is reported that the larger the diameter, the greater the ARF and, therefore, the more the particles are displaced: red particles (10 µm in diameter) then reach the center of the channel, while blue particles (2 µm in diameter) are only displaced a short distance. Hydrodynamic techniques can also be exploited together with the acoustic manipulation to improve particle sorting based on dimensions [
19], but this solution has not been studied in this model.
4. Conclusions
In this work, a numerical model of an SSAW-based device for particle focusing and sorting was reported. The aim of the study was the optimization of the interaction between acoustic waves and the fluid contained in a microchannel bound on the surface of a piezoelectric substrate. The surface waves were generated by using IDT electrodes. Two counter-propagating waves constructively interfered to achieve a standing surface acoustic wave which, on its own, was transferred to the fluid to lead to a standing pressure wave in it.
A parametric study was first performed to investigate the interaction between the mechanics of the surface acoustic waves and the acoustic pressure field within the fluid contained in a microchannel. A full model of the device was solved by coupling fluid flow and ARF, cooperating to move microparticles dispersed in the fluid. The ARF was shown to be effective in displacing the particles from the pressure antinodes towards the pressure nodes. The possibility to selectively focus particles of a different diameter was finally investigated, to also allow separation of particles characterized by different mechanical properties, with the ARF being dependent on the compressibility of the particles too. Applications towards biological cell sorting (CTC bioanalysis) can be considered based on these results.



 and
and 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}