
High Precision Indoor Positioning System for Mobile Asset Management and Safety †


Abstract
:1. Introduction
1.1. Type of Positioning
1.2. Industrial Use Cases
1.3. Techniques of Indoor Positioning
- RSS: This technique is purely dependent on the signal strength of the system. The transmitter 1 transmits the radio signal received by the receiver, which provides the approximation of an object. However, this technique is not suitable where high accuracy is required.
- TOF: This system focuses on radio signal propagation sent from the transmitter for the flight time to the receiver. This appropriate method works smoothly because the speed of radio waves in the air is known.
- TDOA: In TDOA, three or more anchors are placed on known locations, and these anchors are time-synchronized, as shown in Figure 1.
2. Methodology
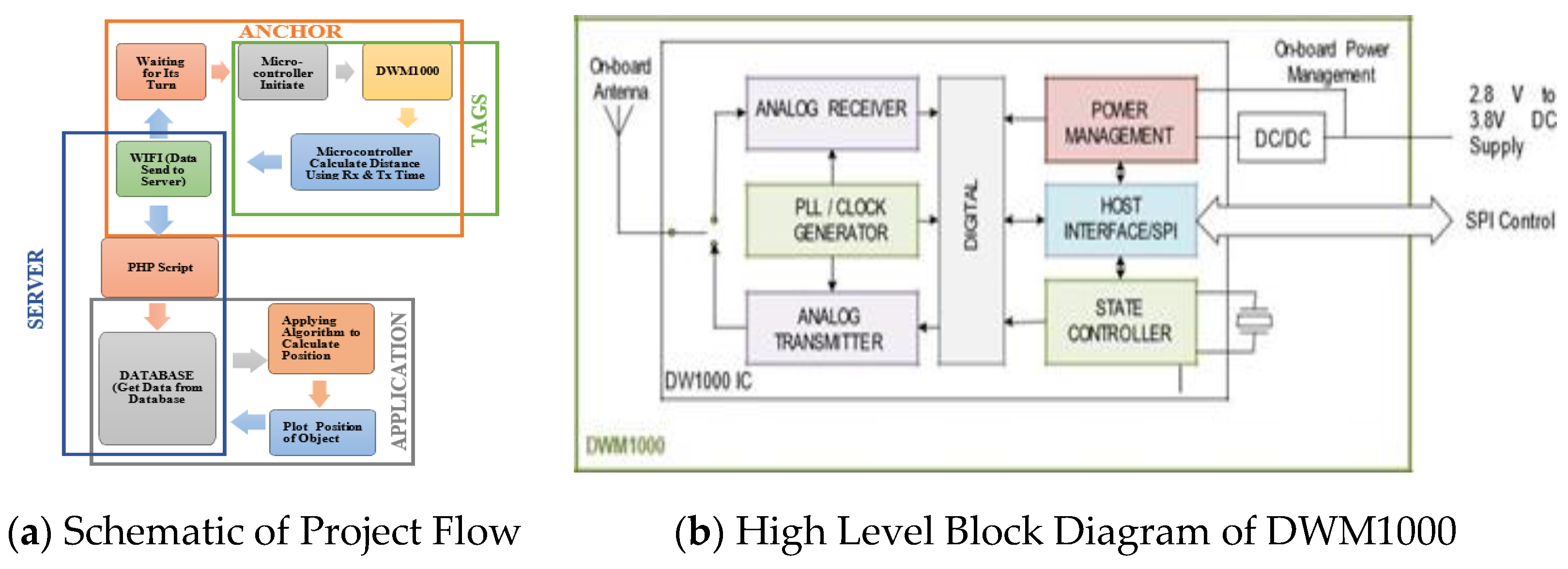
2.1. Design the Solution
- Integration of DW1000 IC, powering the executives, radio wire, clock control to disentangle plane reconciliation
- Allows simple joining with a wide scope of MCUs
- Supports 110 kbps, 850 kbps and 6.8 Mbps information rates
- Frequency of 3.5 GHz–6.5 GHz—channels 1, 2, 3, 4, 5, 7
- 23 mm × 13 mm × 2.9 mm 24-pin side castellations
- Supports ToF and TDoA area planes
2.2. Object Tracking
(ra)2 − (rc)2
= (x − 0)2 + (y − 0)2
= x2 + y2
= (x − 6)2 + (y − 0)2
= x2 − 12x + 36 + y2
= x2 + y2 − 12x + 36
= (x − 0)2 + (y − 10)2
= x2 + y2 − 20y + 100
2.3. Testing
2.4. Comparison between WiFi Device and DecaWave
3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Fallah, N.; Apostolopoulos, I.; Bekris, K.; Folmer, E. Indoor Human Navigation Systems: A Survey. Interact. Comput. 2013, 25, 21–33. [Google Scholar]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum. Cent. Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar] [CrossRef]
- Li, W.; Chen, Z.; Gao, X.; Liu, W.; Wang, J. Multimodel framework for indoor localization under mobile edge computing environment. IEEE Internet Things J. 2018, 6, 4844–4853. [Google Scholar] [CrossRef]
- Satan, A. Bluetooth-based indoor navigation mobile system. In Proceedings of the 19th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 28–31 May 2018. [Google Scholar]
- Satan, A.; Toth, Z. Development of Bluetooth based indoor positioning application. In Proceedings of the 2018 IEEE International Conference on Future IoT Technologies, Eger, Hungary, 18–19 January 2018. [Google Scholar]
- Blankenbach, J.; Norrdine, A. Position Estimation using artificial generated magnetic fields. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15 September 2010. [Google Scholar]
- Nuaimi, K.A.; Kamel, H. A Survey of Indoor Positioning Systems and Algorithms. In Proceedings of the International Conference on Innovations in Information Technology, Abu Dhabi, United Arab Emirates, 25 April 2011. [Google Scholar]
- Mao, G.; Fidan, B.; Anderson, B.D. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Xia, F.; Yang, Z.; Yao, L. Localization Technologies for Indoor Human Tracking. In Proceedings of the 5th International Conference on Future Information Technology, Busan, Korea, 21–23 May 2010. [Google Scholar]
- Amundson, I.; Koutsoukos, X.D. A Survey on Localization for Mobile Wireless Sensor Networks. In Proceedings of the International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments, Orlando, FL, USA, 30 September 2009; pp. 235–254. [Google Scholar]
- Maneerat, K.; Kaemarungsi, K. Performance Improvement Design of Bluetooth Low Energy-Based Wireless Indoor Positioning Systems. Mob. Inf. Syst. 2020, 2020, 18. [Google Scholar] [CrossRef]
- Kouyoumdjieva, S.T.; Karlsson, G. Experimental Evaluation of Precision of a Proximity-based Indoor Positioning System. In Proceedings of the 15th Annual Conference on Wireless On-Demand Network Systems and Services (WONS), Wengen, Switzerland, 22–24 January 2019. [Google Scholar]
- decaWave. DW1000 User Manual—How to Use, Configure and Program the DW1000 UWB Transceiver; decaWave: Greensboro, NC, USA, 2015. [Google Scholar]
- decaWave. APS003 Application Note Real Time Location Systems—An Introduction; decaWave: Greensboro, NC, USA, 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Distance (m) | DecaWave | BLE | WiFi |
|---|---|---|---|
| 1 | 0.94 | 7.079 | 1.75 |
| 2 | 1.97 | 56.23 | 3.91 |
| 3 | 2.81 | 89.12 | 6.46 |
| 4 | 3.92 | 92.34 | 12.37 |
| 5 | 5.05 | 102.5 | 13.88 |
| 6 | 6.1 | 130.06 | 31.08 |
| 7 | 7.06 | Not in range | 55.2 |
| 8 | 7.98 | Not in range | 71.2 |
| 9 | 9.11 | Not in range | 89.7 |
| 10 | 10.02 | Not in range | 106.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fatima, H.S.; Zaman, L.U.; Zia, H.; Khurram, M. High Precision Indoor Positioning System for Mobile Asset Management and Safety. Eng. Proc. 2022, 20, 37. https://doi.org/10.3390/engproc2022020037
Fatima HS, Zaman LU, Zia H, Khurram M. High Precision Indoor Positioning System for Mobile Asset Management and Safety. Engineering Proceedings. 2022; 20(1):37. https://doi.org/10.3390/engproc2022020037
Chicago/Turabian StyleFatima, Hafiza Sundus, Laeeq Uz Zaman, Huma Zia, and Muhammad Khurram. 2022. "High Precision Indoor Positioning System for Mobile Asset Management and Safety" Engineering Proceedings 20, no. 1: 37. https://doi.org/10.3390/engproc2022020037