A Sub-6 GHz Vital Signs Sensor Using Software Defined Radios †

Abstract
:1. Introduction
2. Experimental Setup
3. Implementation Details
3.1. Python and UHD Driver-Based Implementation
3.2. GNU Radio and Octave Implementation
4. Proposed Features and Results
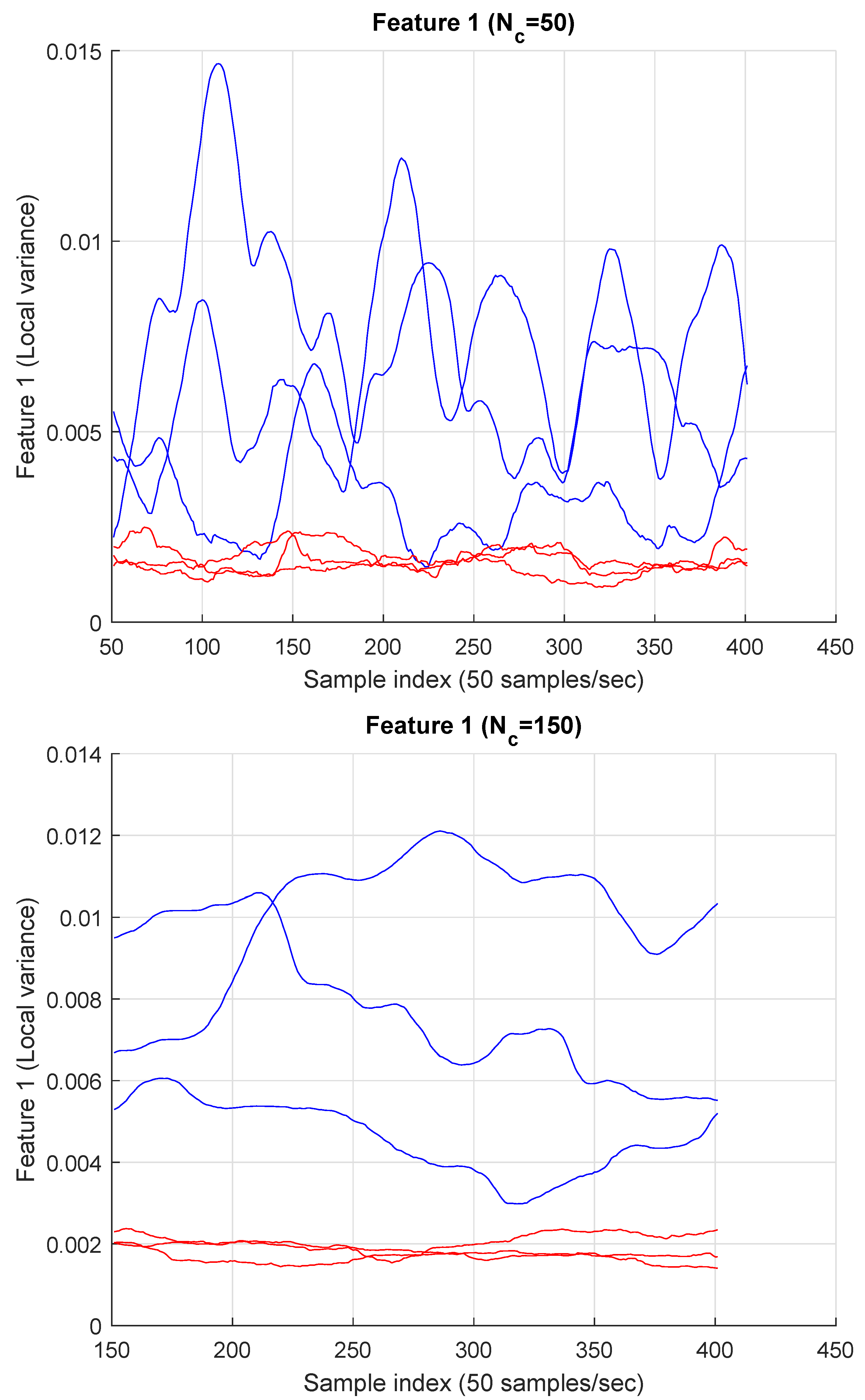
4.1. Feature 1 (Local Variance)
4.2. Feature 2 (Ratio of Low-Frequency Energy Content)
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Raffo, A.; Costanzo, S.; Massa, G.D. Software Defined Doppler Radar as a Contactless Multipurpose Microwave Sensor for Vibrations Monitoring. Sensors 2017, 17, 115. [Google Scholar] [CrossRef] [PubMed]
- Braun, M. OFDM Radar Algorithms in Mobile Communication Networks. Ph.D. Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2014. Available online: https://publikationen.bibliothek.kit.edu/1000038892/2987095 (accessed on 25 November 2020).
- Prager, S.; Thrivikraman, T.; Haynes, M.S.; Stang, J.; Hawkins, D.; Moghaddam, M. Ultrawideband Synthesis for High-Range-Resolution Software-Defined Radar. IEEE Trans. Instrum. Meas. 2020, 69, 3789–3803. [Google Scholar] [CrossRef]
- Vogl, A.; Wang, D.T.; Storås, P.; Bakke, T.; Taklo, M.M.; Thomson, A.; Balgård, L. Design, process and characterisation of a high-performance vibration sensor for wireless condition monitoring. Sens. Actuators A Phys. 2009, 153, 155–161. [Google Scholar] [CrossRef]
- Pieraccini, M.; Fratini, M.; Parrini, F.; Macaluso, G.; Atzeni, C. High-speed CW step-frequency coherent radar for dynamic monitoring of civil engineering structures. Electron. Lett. 2004, 40, 907–908. [Google Scholar] [CrossRef]
- Grazzini, G.; Pieraccini, M.; Dei, D.; Atzeni, C. Simple microwave sensor for remote detection of structural vibration. Electron. Lett. 2009, 45, 567–569. [Google Scholar] [CrossRef]
- Lohman, B.; Boric-Lubecke, O.; Lubecke, V.M.; Ong, P.W.; Sondhi, M.M. A digital signal processor for Doppler radar sensing of vital signs. IEEE Eng. Med. Biol. Mag. 2002, 21, 161–164. [Google Scholar] [CrossRef] [PubMed]
- Gu, C. Assessment of Human Respiration Patterns via Noncontact Sensing Using Doppler Multi-Radar System. Sensors 2015, 15, 6383–6398. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, W.; Zhou, M.; Ren, A.; Tian, Z. Assessment of Human Respiration Patterns via Noncontact Sensing Using Doppler Multi-Radar System. Sensors 2020, 20, 2999. [Google Scholar] [CrossRef] [PubMed]
- Alizadeh, M.; Shaker, G.; Almeida, J.C.M.D.; Morita, P.P.; Safavi-Naeini, S. Remote Monitoring of Human Vital Signs Using mm-Wave FMCW Radar. IEEE Access 2019, 7, 54958–54968. [Google Scholar] [CrossRef]
- Park, J.; Hong, Y.; Lee, H.; Jang, C.; Yun, G.; Lee, H.; Yook, J. Noncontact RF Vital Sign Sensor for Continuous Monitoring of Driver Status. IEEE Trans. Boimed. Circuits Syst. 2019, 13, 493–502. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ubuntu | 18.04.1 |
| PyCharm | 2020.1 |
| Python | 3.6.9 |
| NumPy | 1.16.3 |
| SciPy | 1.2.1 |
| Experiment No. | Class Type | “Feature 2” |
|---|---|---|
| 1 | Class 0 | 0.3699 |
| 2 | Class 0 | 0.4555 |
| 3 | Class 0 | 0.5833 |
| 4 | Class 1 | 0.8067 |
| 5 | Class 1 | 0.8354 |
| 6 | Class 1 | 0.9283 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toker, O.; Adla, R. A Sub-6 GHz Vital Signs Sensor Using Software Defined Radios. Eng. Proc. 2020, 2, 38. https://doi.org/10.3390/ecsa-7-08197
Toker O, Adla R. A Sub-6 GHz Vital Signs Sensor Using Software Defined Radios. Engineering Proceedings. 2020; 2(1):38. https://doi.org/10.3390/ecsa-7-08197
Chicago/Turabian StyleToker, Onur, and Rawa Adla. 2020. "A Sub-6 GHz Vital Signs Sensor Using Software Defined Radios" Engineering Proceedings 2, no. 1: 38. https://doi.org/10.3390/ecsa-7-08197