Detection of Velocity Based on Change in the Apparent Size †


Abstract
:1. Introduction
1.1. Vision-Based Velocity Sensors
1.2. Apparent Dimesion of an Object
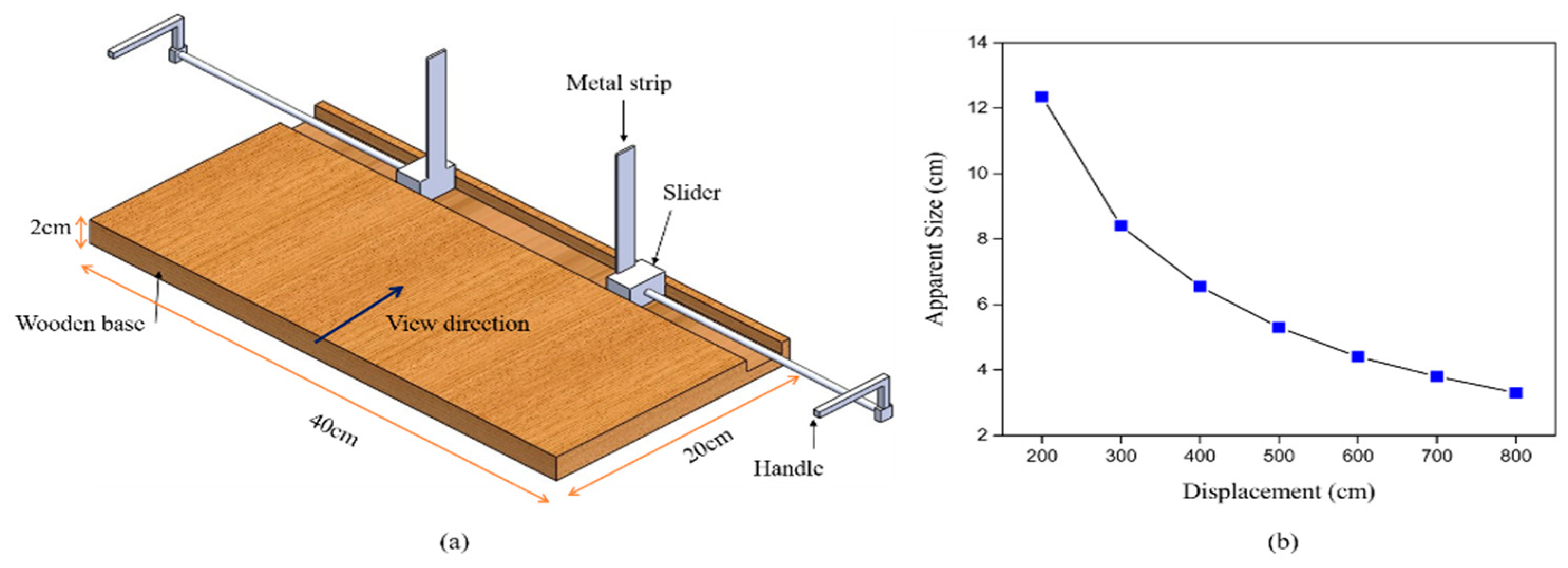
2. Mathematical Analysis
3. Experiments and Discussion
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Saha, Subir Kumar. Introduction to Robotics; Tata McGraw-Hill Education: Chennai, India, 2014. [Google Scholar]
- Niku, Saeed B. Introduction to Robotics: Analysis, Systems, Applications; Prentice hall: Upper Saddle River, NJ, USA, 2001; Volume 7. [Google Scholar]
- Veiga Almagro, C.; Di Castro, M.; Lunghi, G.; Marín Prades, R.; Sanz Valero, P.J.; Pérez, M.F.; Masi, A. Monocular Robust Depth Estimation Vision System for Robotic Tasks Interventions in Metallic Targets. Sensors 2019, 19, 3220. [Google Scholar] [CrossRef] [PubMed]
- Echigo, T. Apparatus and Method for Detecting a Velocity of a Moving Object. U.S. Patent No. 5,771,485, 23 June 1998. [Google Scholar]
- Gomez-Gonzalez, S.; Nemmour, Y.; Schölkopf, B.; Peters, J. Reliable Real-Time Ball Tracking for Robot Table Tennis. Robotics 2019, 8, 90. [Google Scholar] [CrossRef]
- Song, H.; Chen, Y.; Gao, Y. Velocity Calculation by Automatic Camera Calibration Based on Homogenous Fog Weather Condition. Int. J. Autom. Comput. 2013, 10, 143–156. [Google Scholar] [CrossRef]
- Doğan, S.; Temiz, M.S.; Külür, S. Real time speed estimation of moving vehicles from side view images from an uncalibrated video camera. Sensors 2010, 10, 4805–4824. [Google Scholar] [CrossRef] [PubMed]
- He, L.; Yang, J.; Kong, B.; Wang, C. An Automatic Measurement Method for Absolute Depth of Objects in Two Monocular Images Based on SIFT Feature. Appl. Sci. 2017, 7, 517. [Google Scholar] [CrossRef]
- Torralba, A.; Oliva, A. Depth estimation from image structure. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 1226–1238. [Google Scholar] [CrossRef]
- Kang, M.J.; Lee, C.H.; Kim, J.H.; Huh, U.Y. Distance and velocity measurement of moving object using stereo vision system. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 2181–2184. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, K. Structural parameters calibration for binocular stereo vision sensors using a double-sphere target. Sensors 2016, 16, 1074. [Google Scholar] [CrossRef] [PubMed]
- Herstein, R.J.; Walker, M.L. Perception of vehicle speed as a function of vehicle size. Bull. Psychon. Soc. 1993, 31, 566–568. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No | Experimental Displacement of the Object (cm) | Displacement Calculated from the Equation 1 (cm) | Experimental Average Velocity (cm/s) | Average Velocity Calculated by using Equation 6 (cm/s) | Error Magnitude (%) |
|---|---|---|---|---|---|
| 1. | −100 | −104.57 | −20 | −20.914 | 4.57 |
| 2. | −200 | −200.14 | −20 | −20.014 | 0.073 |
| 3. | −300 | −295.81 | −23.076 | −23.754 | 1.399 |
| 4. | −400 | −401.80 | −16 | −16.072 | 0.45 |
| 5. | −500 | −519.89 | −15.15 | −15.75 | 3.95 |
| 6. | −600 | −609.87 | −15 | −15.24 | 1.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sivarathri, A.K.; Mohammad, A.; Shitole, P.P. Detection of Velocity Based on Change in the Apparent Size. Eng. Proc. 2020, 2, 27. https://doi.org/10.3390/ecsa-7-08158
Sivarathri AK, Mohammad A, Shitole PP. Detection of Velocity Based on Change in the Apparent Size. Engineering Proceedings. 2020; 2(1):27. https://doi.org/10.3390/ecsa-7-08158
Chicago/Turabian StyleSivarathri, Ashok Kumar, Amir Mohammad, and Pankaj Popatrao Shitole. 2020. "Detection of Velocity Based on Change in the Apparent Size" Engineering Proceedings 2, no. 1: 27. https://doi.org/10.3390/ecsa-7-08158