
A Multipurpose Wearable Sensor-Based System for Weight Training


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology and System Description
2.1. Smart Glove Platform
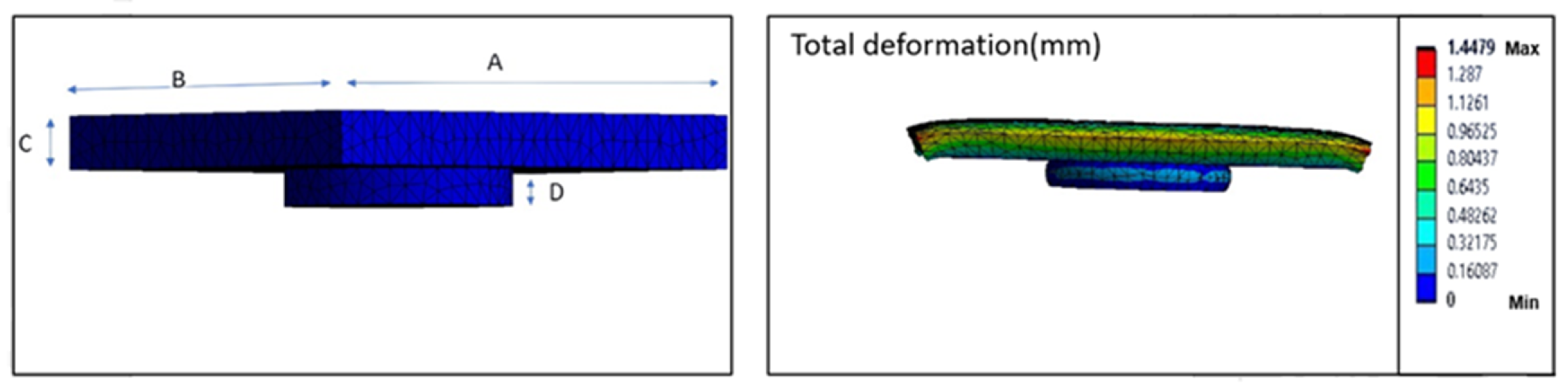
2.2. Sensor Fabrication
2.3. Experimental Section
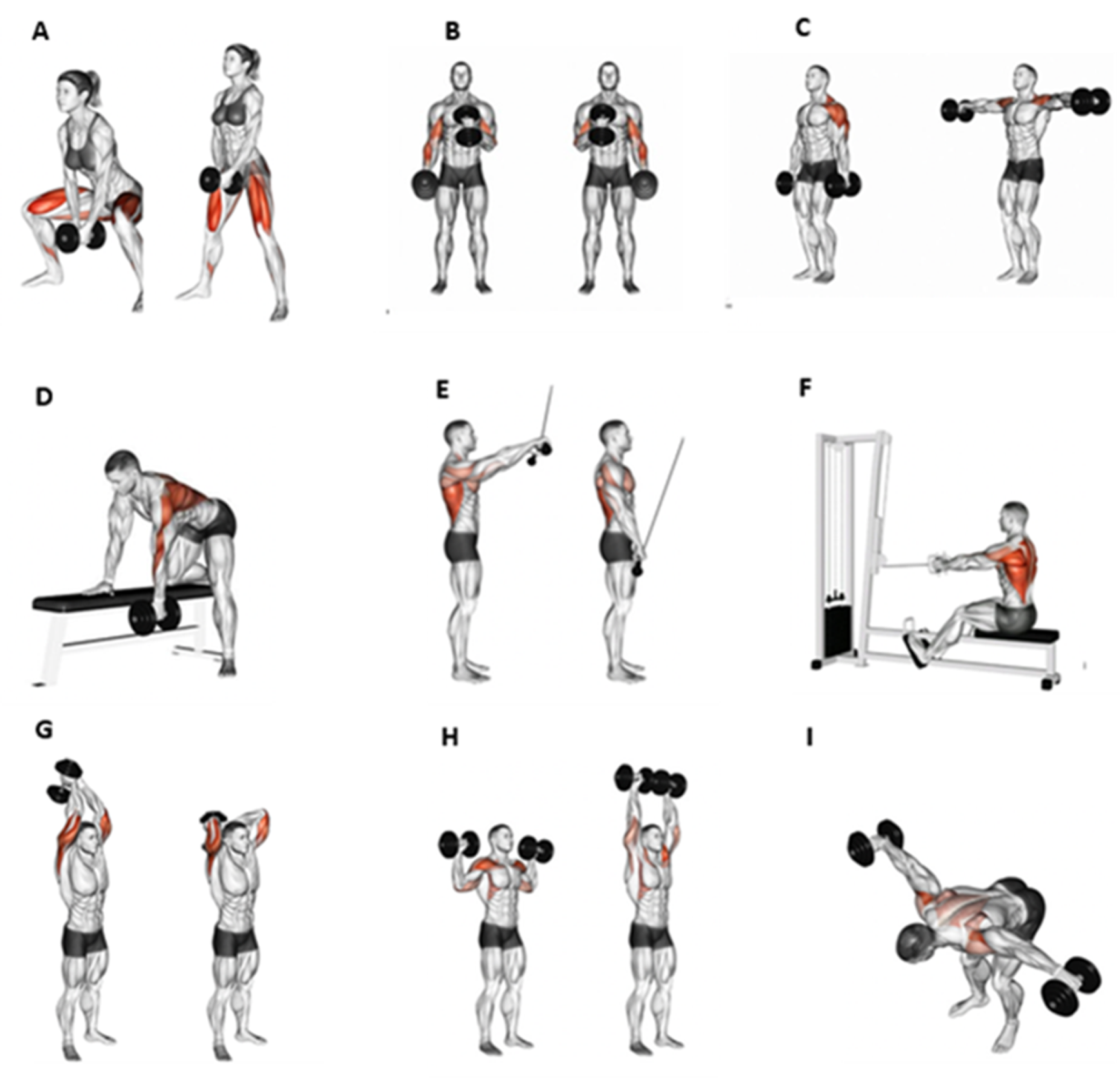
2.3.1. Experiments Overview
2.3.2. Experimental Procedure
2.4. Fitness Activity Recognition Data Processing Methods
2.4.1. Preprocessing
2.4.2. Segmentation
2.4.3. Feature Extraction
2.4.4. Feature Selection
2.5. Weight Prediction Data Processing Methods
Data Preprocessing and Feature Extraction
2.6. Classification
2.6.1. Activity Recognition
2.6.2. Weight Prediction
2.7. Evaluation Metrics
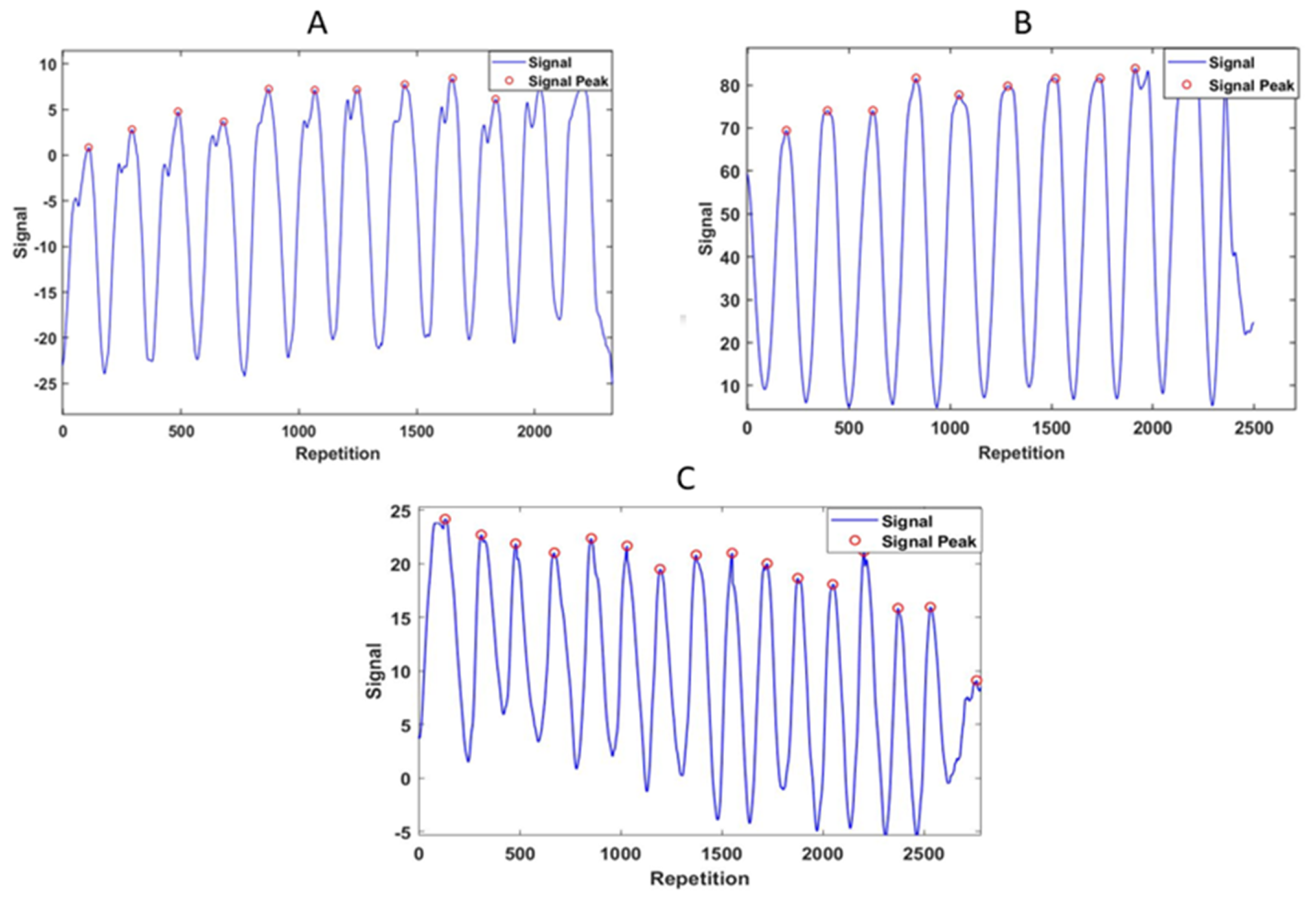
2.8. Count Repetition Algorithm
3. Results
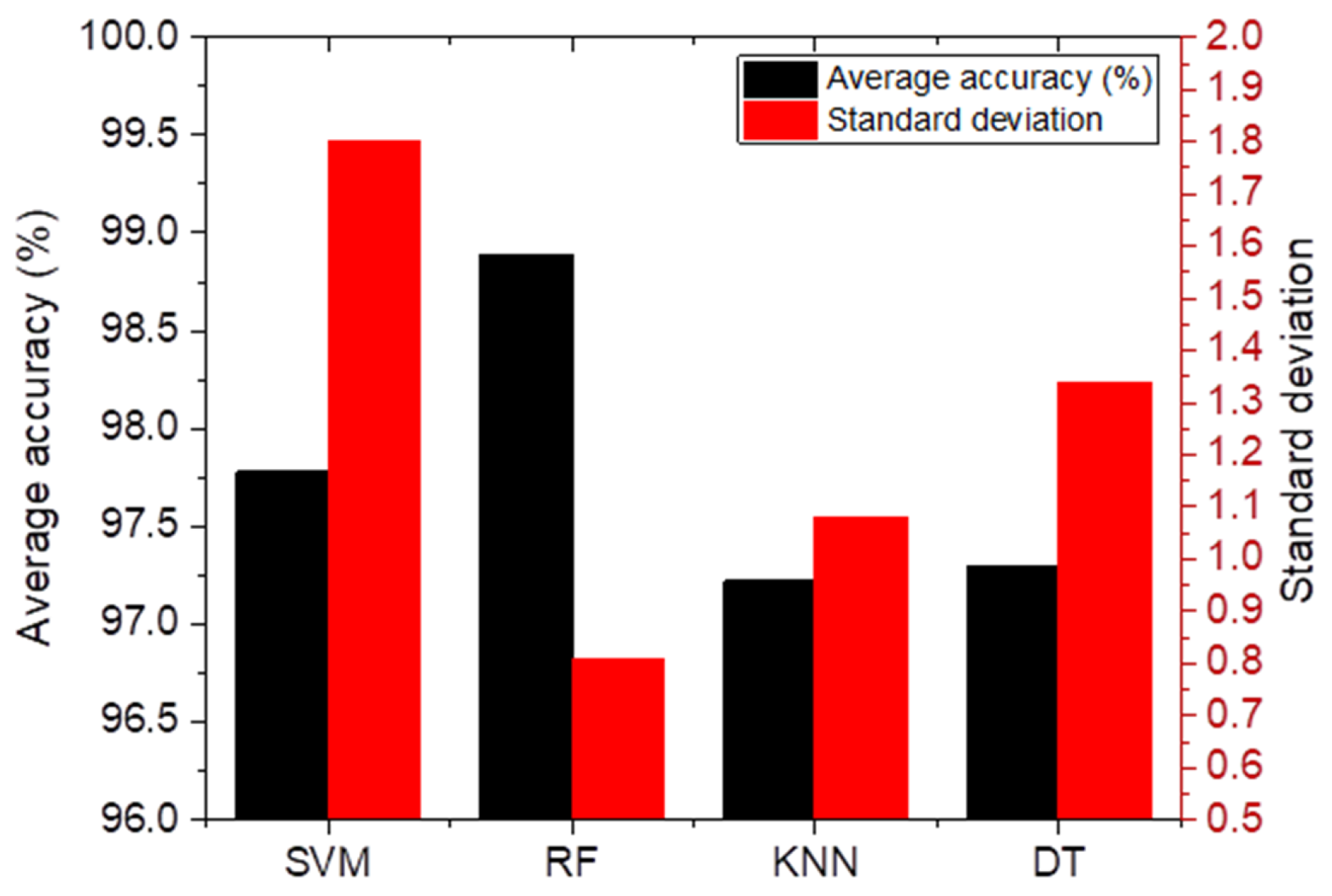
3.1. Activity Recognition
3.2. Repetition Counting
3.3. Weight Prediction
4. Discussion
4.1. Sensing Scope and System Generalization
4.2. User Feedback System
4.3. Quality Assesment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thompson, W.R. Worldwide Survey of Fitness Trends for 2021 Apply It! 2020. Available online: www.acsm-healthfitness.org(accessed on 9 December 2021).
- Bennie, J.A.; Shakespear-Druery, J.; de Cocker, K. Muscle-strengthening Exercise Epidemiology: A New Frontier in Chronic Disease Prevention. Sports Med. Open 2020, 6, 1. [Google Scholar] [CrossRef] [PubMed]
- Kraemer, W.J.; Ratamess, N.A.; French, D.N. Resistance Training for Health and Performance. Curr. Sports Med. Rep. 2002, 1, 165–171. [Google Scholar] [CrossRef]
- Winett, R.A.; Carpinelli, R.N. Potential health-related benefits of resistance training. Prev. Med. 2001, 33, 503–513. [Google Scholar] [CrossRef] [PubMed]
- Westcott, W.L. Resistance Training is Medicine: Effects of Strength Training on Health. 2012. Available online: http://journals.lww.com/acsm-csmr (accessed on 9 December 2021).
- Tucker, L.A.; Maxwell, K. Effects of Weight Training on the Emotional Well-Being and Body Image of Females: Predictors of Greatest Benefit. Am. J. Health Promot. 1992, 6, 5. [Google Scholar] [CrossRef] [PubMed]
- Bravata, D.M.; Smith-Spangler, C.; Sundaram, V.; Gienger, A.L.; Lin, N.; Lewis, R.; Stave, C.D.; Olkin, I.; Sirard, J.R. Using Pedometers to Increase Physical Activity and Improve Health: A systematic review. J. Am. Med. Assoc. 2007, 298, 2296–2304. [Google Scholar] [CrossRef] [PubMed]
- Merom, D.; Rissel, C.; Phongsavan, P.; Smith, B.J.; Van Kemenade, C.; Brown, W.J.; Bauman, A.E.; Smith, B. Promoting Walking with Pedometers in the Community The Step-by-Step Trial. Am. J. Prev. Med. 2007, 32, 290–297. [Google Scholar] [CrossRef]
- Shen, C.; Ho, B.-J.; Srivastava, M. MiLift: Efficient Smartwatch-Based Workout Tracking Using Automatic Segmentation. IEEE Trans. Mob. Comput. 2017, 17, 1609–1622. [Google Scholar] [CrossRef]
- Qi, J.; Yang, P.; Hanneghan, M.; Tang, S.; Zhou, B. A Hybrid Hierarchical Framework for Gym Physical Activity Recognition and Measurement Using Wearable Sensors. IEEE Internet Things J. 2019, 6, 1384–1393. [Google Scholar] [CrossRef] [Green Version]
- Akpa, A.H.E.; Fujiwara, M.; Suwa, H.; Arakawa, Y.; Yasumoto, K. A Smart Glove to Track Fitness Exercises by Reading Hand Palm. J. Sens. 2019, 2019, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Z.G.; Menon, C. A Review of Force Myography Research and Development. Sensors 2019, 19, 4557. [Google Scholar] [CrossRef] [Green Version]
- Stefanou, T.; Chance, G.; Assaf, T.; Lenz, A.; Dogramadzi, S. Wearable Tactile Sensor Brace for Motion Intent Recognition in Upper-Limb Rehabilitation. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics, Enschede, The Netherlands, 26–29 August 2018. [Google Scholar]
- Ahmadizadeh, C.; Merhi, L.-K.; Pousett, B.; Sangha, S.; Menon, C. Toward Intuitive Prosthetic Control: Solving Common Issues Using Force Myography, Surface Electromyography, and Pattern Recognition in a Pilot Case Study. IEEE Robot. Autom. Mag. 2017, 24, 102–111. [Google Scholar] [CrossRef]
- Godiyal, A.K.; Mondal, M.; Joshi, S.D.; Joshi, D. Force Myography Based Novel Strategy for Locomotion Classification. IEEE Trans. Hum. Mach. Syst. 2018, 48, 648–657. [Google Scholar] [CrossRef]
- Xiao, Z.G.; Menon, C. Does force myography recorded at the wrist correlate to resistance load levels during bicep curls? J. Biomech. 2018, 83, 310–314. [Google Scholar] [CrossRef] [PubMed]
- Lim, C.G.; Tsai, C.Y.; Chen, M.Y. MuscleSense: Exploring weight sensing using wearable surface electromyography (sEMG). In Proceedings of the TEI 2020—Proceedings of the 14th International Conference on Tangible, Embedded, and Embodied Interaction, New York, NY, USA, 9–12 February 2020; pp. 255–263. [Google Scholar] [CrossRef] [Green Version]
- Farrokhi, A.; Rezazadeh, J.; Farahbakhsh, R.; Ayoade, J. A Decision Tree-Based Smart Fitness Framework in IoT. SN Comput. Sci. 2021, 3, 1–10. [Google Scholar] [CrossRef]
- Velloso, E.; Bulling, A.; Gellersen, H.; Ugulino, W.; Fuks, H. Qualitative Activity Recognition of Weight Lifting Exercises. In Proceedings of the AH’13: 4th Augmented Human International Conference, Stuttgart, Germany, 7–8 March 2013. [Google Scholar]
- Wang, X.; Liu, Z.; Zhang, T. Flexible Sensing Electronics for Wearable/Attachable Health Monitoring. Small 2017, 13, 2790. [Google Scholar] [CrossRef]
- Likitlersuang, J.; Leineweber, M.J.; Andrysek, J. Evaluating and improving the performance of thin film force sensors within body and device interfaces. Med. Eng. Phys. 2017, 48, 206–211. [Google Scholar] [CrossRef]
- Bashar, S.K.; Al Fahim, A.; Chon, K.H. Smartphone Based Human Activity Recognition with Feature Selection and Dense Neural Network. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020. [Google Scholar] [CrossRef]
- Lima, W.S.; Souto, E.; El-Khatib, K.; Jalali, R.; Gama, J. Human activity recognition using inertial sensors in a smartphone: An overview. Sensors 2019, 19, 3213. [Google Scholar] [CrossRef] [Green Version]
- Figo, D.; Diniz, P.C.; Ferreira, D.R.; Cardoso, J.M.P. Preprocessing techniques for context recognition from accelerometer data. Pers. Ubiquitous Comput. 2010, 14, 645–662. [Google Scholar] [CrossRef]
- Chatfield, C. The Analysis of Time Series: An Introduction, 6th ed.; CRC Press: New York, NY, USA, 2003. [Google Scholar]
- Khusainov, R.; Azzi, D.; Achumba, I.E.; Bersch, S.D. Real-Time Human Ambulation, Activity, and Physiological Monitoring: Taxonomy of Issues, Techniques, Applications, Challenges and Limitations. Sensors 2013, 13, 12852–12902. [Google Scholar] [CrossRef] [Green Version]
- Das, D.; Busetty, S.M.; Bharti, V.; Hegde, P.K. Strength training: A fitness application for indoor based exercise recognition and comfort analysis. In Proceedings of the 16th IEEE International Conference on Machine Learning and Applications, Cancun, Mexico, 18–21 December 2017. [Google Scholar]
- Ishii, S.; Yokokubo, A.; Luimula, M.; Lopez, G. ExerSense: Physical Exercise Recognition and Counting Algorithm from Wearables Robust to Positioning. Sensors 2020, 21, 91. [Google Scholar] [CrossRef]
- Fang, P.; Ma, X.; Li, X.; Qiu, X.; Gerhard, R.; Zhang, X.; Li, G. Fabrication, Structure Characterization, and Performance Testing of Piezoelectret-Film Sensors for Recording Body Motion. IEEE Sens. J. 2018, 18, 401–412. [Google Scholar] [CrossRef]
- Jiang, X.; Merhi, L.-K.; Menon, C. Force Exertion Affects Grasp Classification Using Force Myography. IEEE Trans. Human-Mach. Syst. 2017, 48, 219–226. [Google Scholar] [CrossRef]
- Sadarangani, G.P.; Jiang, X.; Simpson, L.A.; Eng, J.J.; Menon, C. Force Myography for Monitoring Grasping in Individuals with Stroke with Mild to Moderate Upper-Extremity Impairments: A Preliminary Investigation in a Controlled Environment. Front. Bioeng. Biotechnol. 2017, 5, 42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Müller, P.N.; Rauterberg, F.; Achenbach, P.; Tregel, T.; Göbel, S. Physical Exercise Quality Assessment Using Wearable Sensors; Springer: Berlin/Heidelberg, Germany, 2021; pp. 229–243. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balkhi, P.; Moallem, M. A Multipurpose Wearable Sensor-Based System for Weight Training. Automation 2022, 3, 132-152. https://doi.org/10.3390/automation3010007
Balkhi P, Moallem M. A Multipurpose Wearable Sensor-Based System for Weight Training. Automation. 2022; 3(1):132-152. https://doi.org/10.3390/automation3010007
Chicago/Turabian StyleBalkhi, Parinaz, and Mehrdad Moallem. 2022. "A Multipurpose Wearable Sensor-Based System for Weight Training" Automation 3, no. 1: 132-152. https://doi.org/10.3390/automation3010007