

An Adaptive Scheduling Mechanism Optimized for V2N Communications over Future Cellular Networks


Abstract
:1. Introduction
- (a)
- Device-to-device mode communication (D2D): including Vehicle-to-Vehicle (V2V), Vehicle-to-Pedestrian (V2P), and Vehicle-to-Infrastructure (V2I). The latter refers to communication among infrastructure components supporting highway systems (e.g., RFID readers, cameras, traffic lights, etc.). D2D does not require a cellular network infrastructure or even a SIM (Subscribed Identity Module) card. For synchronization purposes, GNSS (Global Navigation Satellite System) is used.
- (b)
- Vehicle-to-Network (V2N) communications: This mode of communication uses the typical cellular wireless links to establish communication among vehicles, service providers, RAN, Core and (far) edge/cloud infrastructure, etc.
- The implementation of the aforementioned scheduler.
- The implementation of the scheduler using the ns-3 and the SUMO [10] environment calibrating the simulator based on 3GPP’s and 5GAA data
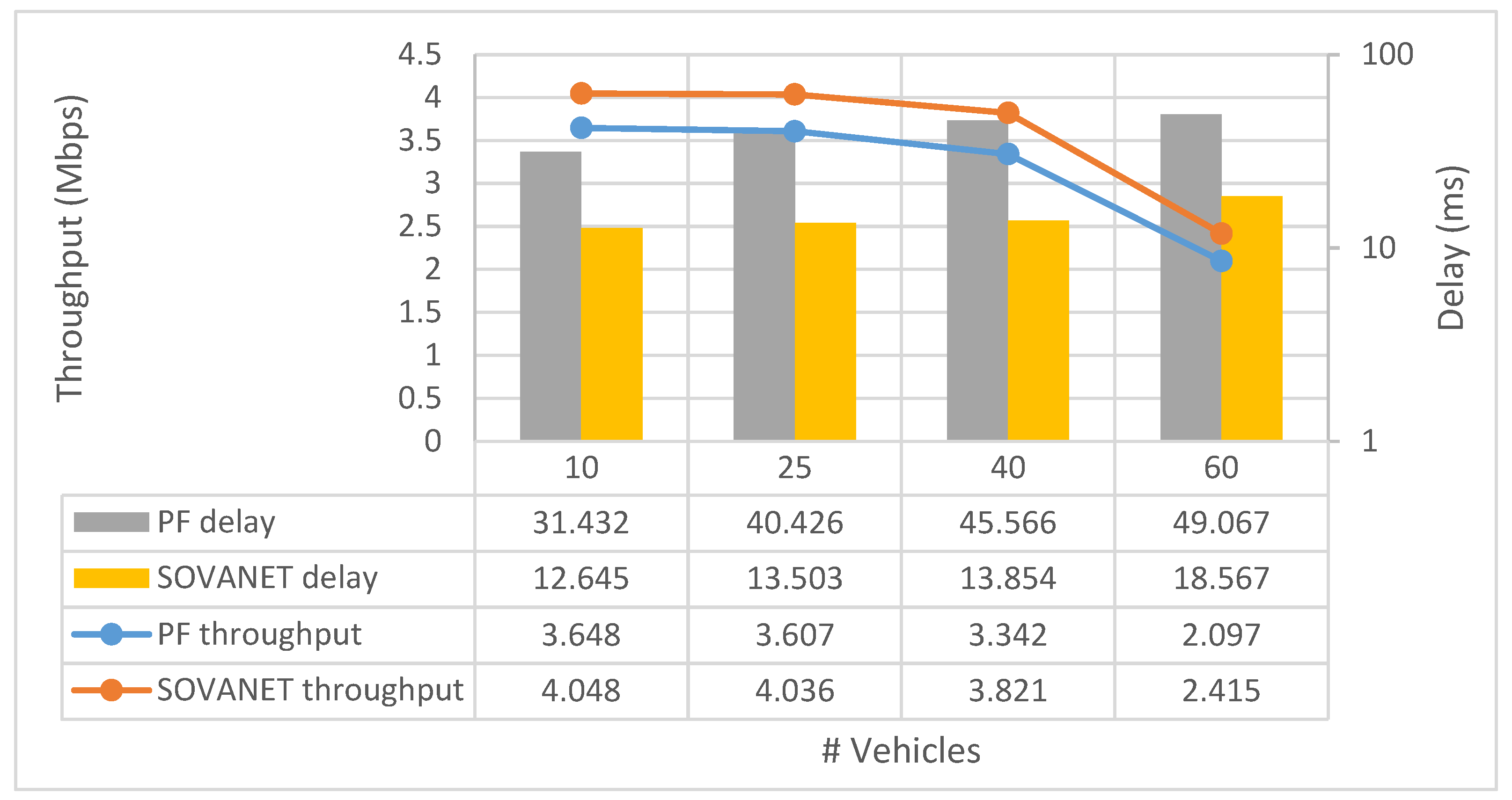
- The performance comparison of the proposed scheduler against the Proportional Fair (PF) scheduler.
2. Scheduling Algorithms
2.1. Well-Established 5G Scheduling Algorithms
- Round-Robin (RR) scheduler: the scheduler distributes the available Resource Block Groups (RBGs) evenly among UEs in a cell.
- Proportional Fair (PF) scheduler: the scheduler tries to maximize the total throughput of the network while at the same time attempting to provide all users with at least a minimal level of service. To achieve this, the scheduling priority is inverse to the UE and proportional to the anticipated resource consumption for a UE. Our paper considers the ns-3 PF scheduler, where a UE is scheduled when its instantaneous channel quality is high relative to its own average channel condition.
- Maximum Rate (MR) scheduler: the scheduler aims to maximize the overall throughput for a base station. To achieve this, it allocates resource blocks to the user that can achieve the maximum achievable rate in the current Time Transmission Interval (TTI).
2.2. Proposed Schedulers for 5G and Beyond including V2X Communications
3. The Key Features of the SOVANET Algorithm
- Teleoperated Driving (ToD): a service that assists, complements, and accelerates semi- and fully automated driving in various scenarios. It is considered a V2N service, as the server for this application will be located at the northbound interface, the edge or even the core network of an operator. This service is delay sensitive with significant throughput requirements on the UL.
- High-Definition Mapping and Sharing (HDM): a service where vehicles equipped with LIDAR or other HD sensors collect and share environment information with a high-definition map provider, which then builds high-definition maps and shares them with vehicles. This service is expected to support the development of higher automated driving levels in the future. It is another V2N delay-sensitive service with significant throughput requirements on both the UL and the downlink (DL).
4. Simulation Environment
5. Performance Evaluation
6. Conclusions
- SOVANET takes into consideration real-time information about the load on both the UL and DL and balances the resources so that the performance on the uplink and the downlink are equally balanced
- SOVANET considers each session’s needs and over-provides resources for the critical services while reducing corresponding resources for non-critical services.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- SAE Document J3016_202104. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 30 April 2021).
- 5GAA. C-V2X Explained. Available online: https://5gaa.org/c-v2x-explained/ (accessed on 10 April 2023).
- Khan, M.J.; Khan, M.A.; Malik, S.; Kulkarni, P.; Alkaabi, N.; Ullah, O.; El-Sayed, H.; Ahmed, A.; Turaev, S. Advancing C-V2X for Level 5 Autonomous Driving from the Perspective of 3GPP Standards. Sensors 2023, 23, 2261. [Google Scholar] [CrossRef] [PubMed]
- TR 22.886 V16.2.0; Technical Report 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Study on Enhancement of 3GPP Support for 5G V2X Services (Release 16). 3GPP: Biot, France, 2018.
- 5GAA. C-V2X Use Cases Volume II: Examples and Service Level Requirements. In 5GAA Automotive Association White Paper; 5GAA: Munich, Germany, 2020. [Google Scholar]
- 5GAA. A visionary roadmap for advanced driving use cases, connectivity technologies, and radio spectrum needs. In 5GAA Automotive Association White Paper; 5GAA: Munich, Germany, 2022. [Google Scholar]
- Kanavos, A.; Fragkos, D.; Kaloxylos, A. V2X communication over cellular networks: Capabilities and Challenges. Telecom 2021, 2, 1–26. [Google Scholar] [CrossRef]
- TR S-200137; Working Group Standards and Spectrum Study of Spectrum Needs for Safety Related Intelligent Transportation Systems—Day 1 and Advanced Use Cases. 5GAA: Munich, Germany, 2020.
- Baumgartner, M.; Juhar, J. Simulation of 5G and LTE-A access technologies via network simulator NS-3. In Proceedings of the IEEE 44th International Conference on Telecommunications and Signal Processing (TSP), Brno, Czech Republic, 26–28 July 2021. [Google Scholar]
- Lim, K.G.; Lee, C.H.; Chin, R.K.Y.; Yeo, K.B.; Teo, K.T.K. SUMO enhancement for vehicular ad-hoc network (VANET) simulation. In Proceedings of the IEEE 2nd International Conference on Automatic Contril and Intelligent Systems (I2ACIS), Kota Kinabalu, Malaysia, 21 October 2017. [Google Scholar]
- Mamane, A.; Fattah, M.; El Ghazi, M.; El Bekkali, M.; Balboul, Y.; Mazer, S. Scheduling Algorithms for 5G Networks and Beyond: Classification and Survey. IEEE Access 2022, 10, 51643–51661. [Google Scholar] [CrossRef]
- Nguyen, D.-H.; Nguyen, H.; Renault, E. E-MQS—A new downlink scheduler for real-time flows in LTE network. In Proceedings of the IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar]
- Comşa, I.-S.; Zhang, S.; Aydin, M.E.; Kuonen, P.; Lu, Y.; Trestian, R.; Ghinea, G. Towards 5G: A reinforcement learning-based scheduling solution for data traffic management. IEEE Trans. Netw. Serv. Manag. 2018, 15, 1661–1675. [Google Scholar] [CrossRef] [Green Version]
- Korrai, P.; Lagunas, E.; Sharma, S.K.; Chatzinotas, S.; Bandi, A.; Ottersten, B. A RAN Resource Slicing Mechanism for Multiplexing of eMBB and URLLC Services in OFDMA Based 5G Wireless Networks. IEEE Access 2020, 8, 45674–45688. [Google Scholar] [CrossRef]
- Khabaz, S.; Boulila, K.O.; Nguyen, T.M.T.; El Aoun, M.; Velloso, B.P. A New Priority and Satisfaction-based Resource Allocation Algorithm with Mixed Numerology for 5G-V2X communications. In Proceedings of the 2022 14th IFIP Wireless and Mobile Networking Conference (WMNC), Sousse, Tunisia, 17–19 October 2022. [Google Scholar] [CrossRef]
- Bouhamed, E.; Marouane, H.; Trabelsi, A.; Zerai, F. Scheduling Algorithm supporting V2X Communications based on NOMA access. IFAC-PapersOnLine 2020, 53, 14948–14953. [Google Scholar] [CrossRef]
- He, S.; Du, J.; Liao, Y. Multi-User Scheduling for 6G V2X Ultra-Massive MIMO System. Sensors 2021, 21, 6742. [Google Scholar] [CrossRef] [PubMed]
- Abbas, F.; Liu, G.; Fan, P.; Khan, Z.; Bute, M.S. A vehicle density based two-stage resource management scheme for 5G-V2X Networks. In Proceedings of the 91st IEEE Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. [Google Scholar] [CrossRef]
- Deinlein, T.; Roshdi, M.; Nan, T.; Heyn, T.; Djanatliev, A.; German, R. On the impact of priority-based MAC layer scheduling in 5G V2N multi-application scenarios. In Proceedings of the 13th IFIP Wireless and Mobile Networking Conference (WMNC), Montreal, QC, Canada, 20–22 October 2021. [Google Scholar] [CrossRef]
- Mustaffa, M.A.B.; Abidin, H.B.Z.; Mazalan, L.B.; Zaman, F.H.K.; Mun, N.K.; Abdullah, S.A.B.C. Performance analysis of heterogeneous data transmission in 5G C-V2N communication. In Proceedings of the 10th IEEE Conference on Systems, Process & Control, Melaka, Malaysia, 17 December 2022. [Google Scholar] [CrossRef]
- Kaloxylos, A. A survey and an analysis of network slicing in 5G networks. IEEE Commun. Stand. Mag. 2018, 2, 60–65. [Google Scholar] [CrossRef]
- ns3::NrMacSchedulerNs3 Class|5G-LENA Official Doxygen Documentation. Available online: https://cttc-lena.gitlab.io/nr/html/classns3_1_1_nr_mac_scheduler_ns3.html (accessed on 29 March 2023).
- Patriciello, N.; Lagen, S.; Giupponi, L.; Bojovic, B. An Improved MAC Layer for the 5G NR NS-3 module. In Proceedings of the 2019 Workshop on NS-3, Florence, Italy, 19 June 2019; pp. 41–48. [Google Scholar] [CrossRef]
- TR 38.913 V17.0.0; Technical Report 3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Study on Scenarios and Requirements for Next Generation Access Technologies; (Release 17). 3GPP: Biot, France, 2022.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UC | Throughput | Delay |
|---|---|---|
| ToD | 400 kbps (DL) 16 Mbps (UL) | 5 ms |
| HDM | 16 Mbps (DL) 4 Mbps (UL) | 10 ms |
| BSM | 8 kbps (DL) 8 kbps (UL) | 100 ms |
| Parameter | Value |
|---|---|
| Number of lanes | 2 in each direction (4 lanes in total in each street) |
| Lane width | 3.5 m |
| Road size by the distance before and after intersection | 75 m × 75 m |
| Simulation area size | 164 m × 164 m |
| Parameter | Value |
|---|---|
| Number of Vehicles | 10, 25, 40, 60 |
| Max speed | 35 km/h |
| Vehicle’s Length | 4.5 m |
| Sigma | 0.5 (driver’s imperfection, 0–1) |
| Depart position | Random |
| Traffic Lights | Yes, with fixed phase durations |
| Parameter | Value |
|---|---|
| Channel model | 3GPP TR 38.913 [24] |
| Frequency range | A range of bands from 3300–4990 MHz identified for WRC-15 are currently being considered and around 4 GHz is chosen as a proxy for this range [24] |
| Channel bandwidth | 100 MHz |
| Carrier frequency | 4 GHz |
| Shadowing | enabled |
| Beamforming method | NO |
| MIMO | NO |
| MCS | Adaptive |
| gNB Tx power | 49 dBm |
| UE Tx power | 33 dBm |
| Schedulers | Proportional Fair vs. SOVANET |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kanavos, A.; Barmpounakis, S.; Kaloxylos, A. An Adaptive Scheduling Mechanism Optimized for V2N Communications over Future Cellular Networks. Telecom 2023, 4, 378-392. https://doi.org/10.3390/telecom4030022
Kanavos A, Barmpounakis S, Kaloxylos A. An Adaptive Scheduling Mechanism Optimized for V2N Communications over Future Cellular Networks. Telecom. 2023; 4(3):378-392. https://doi.org/10.3390/telecom4030022
Chicago/Turabian StyleKanavos, Athanasios, Sokratis Barmpounakis, and Alexandros Kaloxylos. 2023. "An Adaptive Scheduling Mechanism Optimized for V2N Communications over Future Cellular Networks" Telecom 4, no. 3: 378-392. https://doi.org/10.3390/telecom4030022