Hybrid Multi-Antenna Techniques for V2X Communications—Prototyping and Experimentation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Distributed Multiple Antennas for V2X Communications
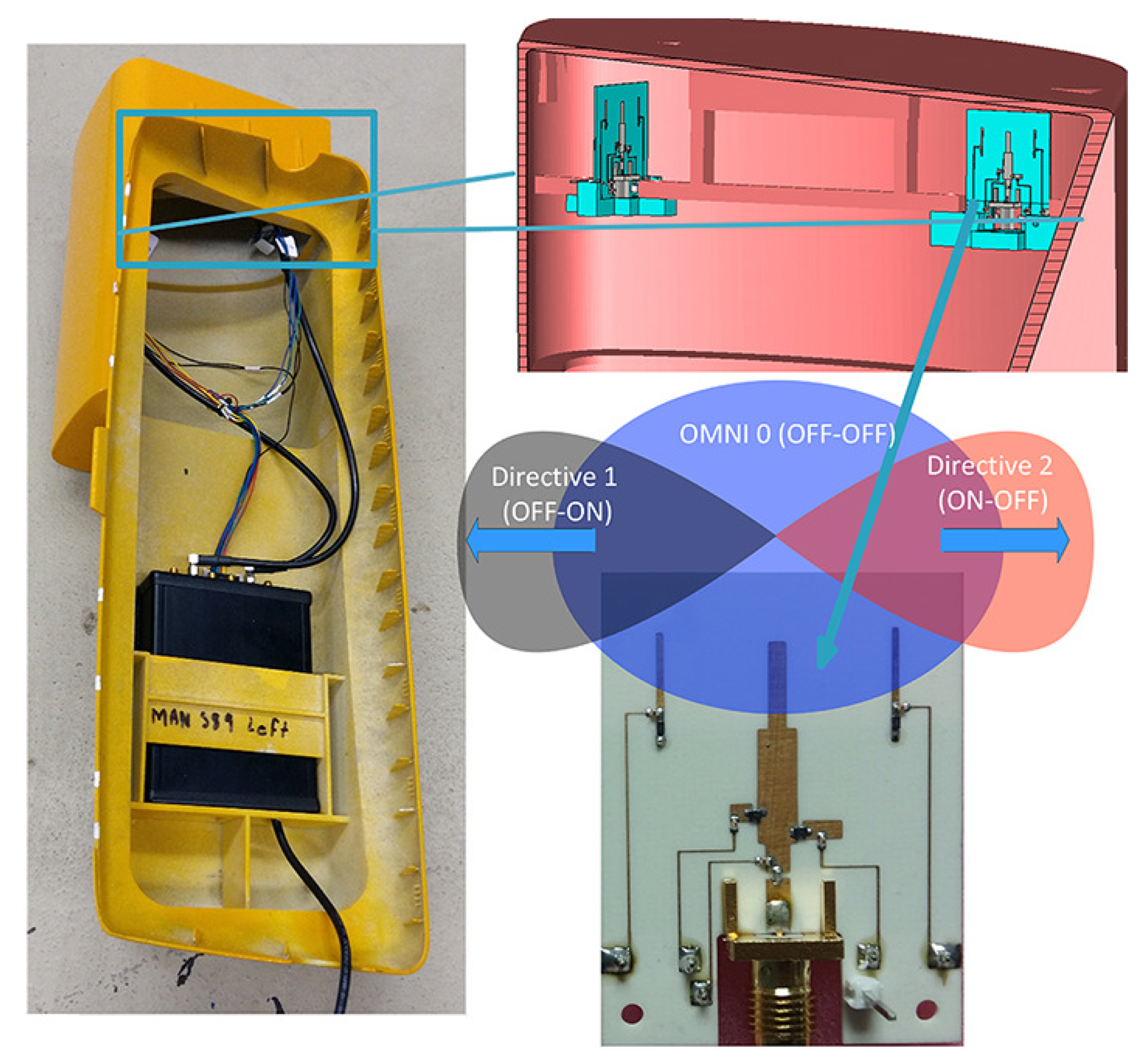
2.1. ESPAR Antennas
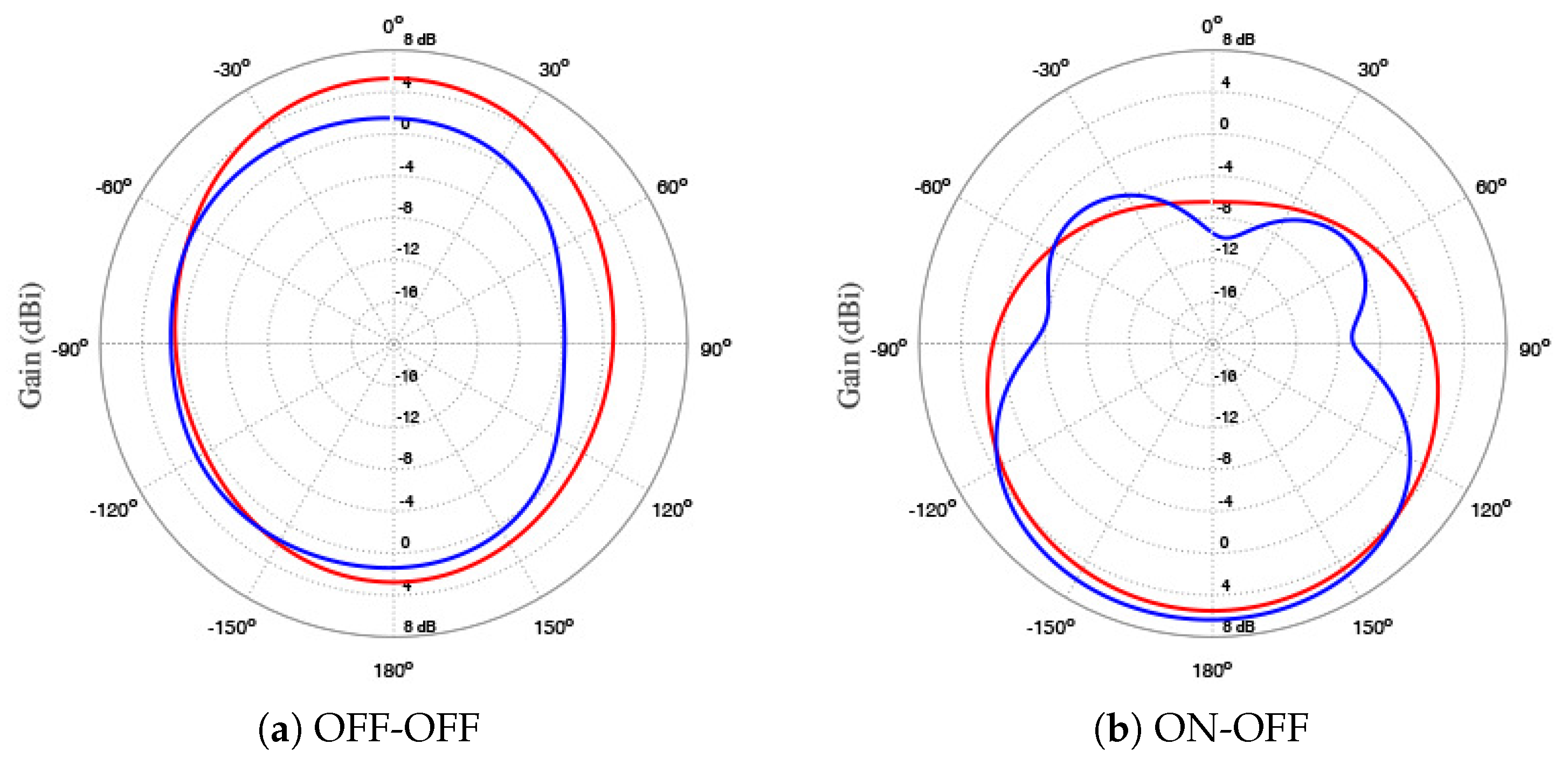
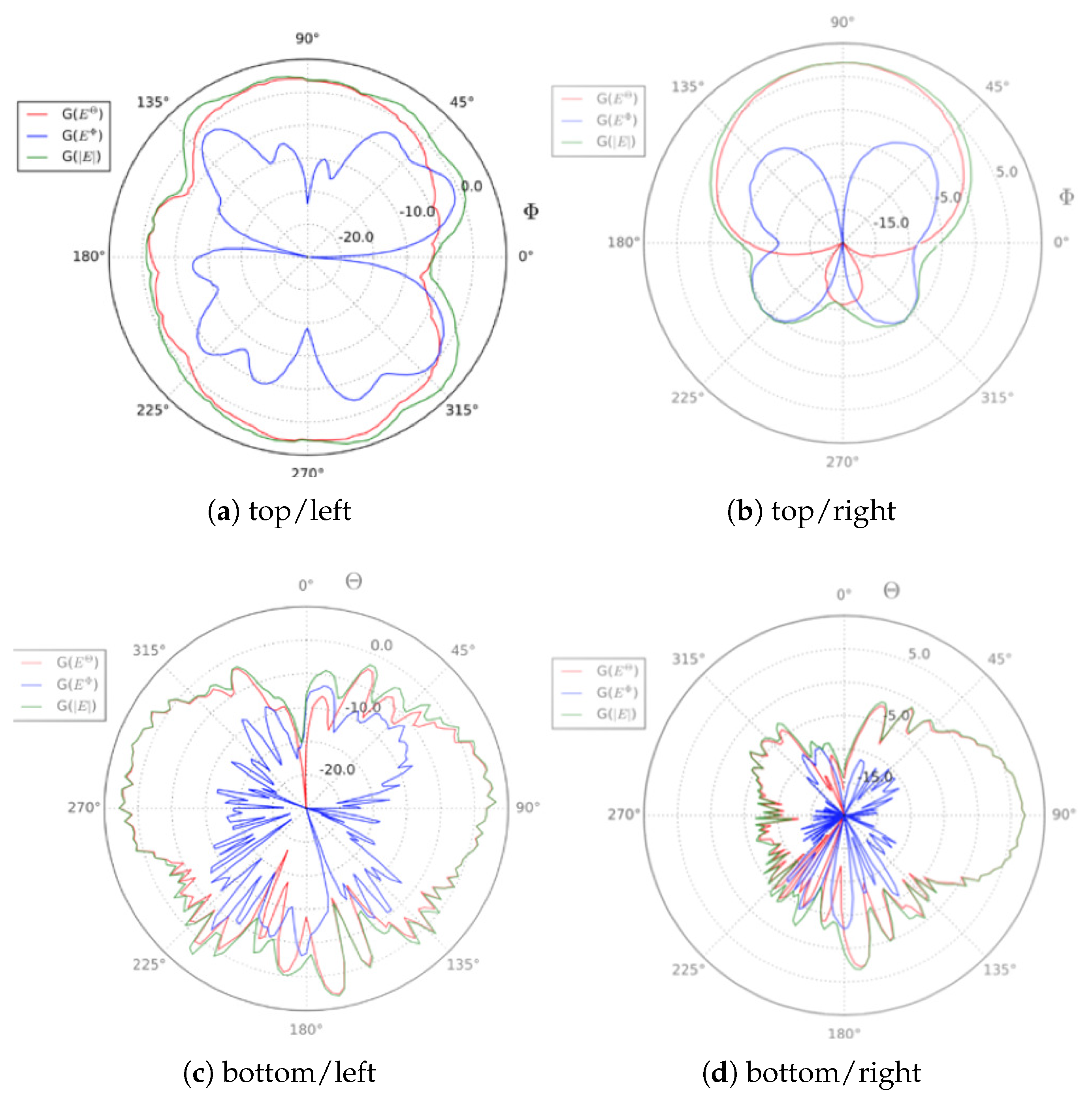
2.2. Configuration of the ESPAR Antenna and Performance
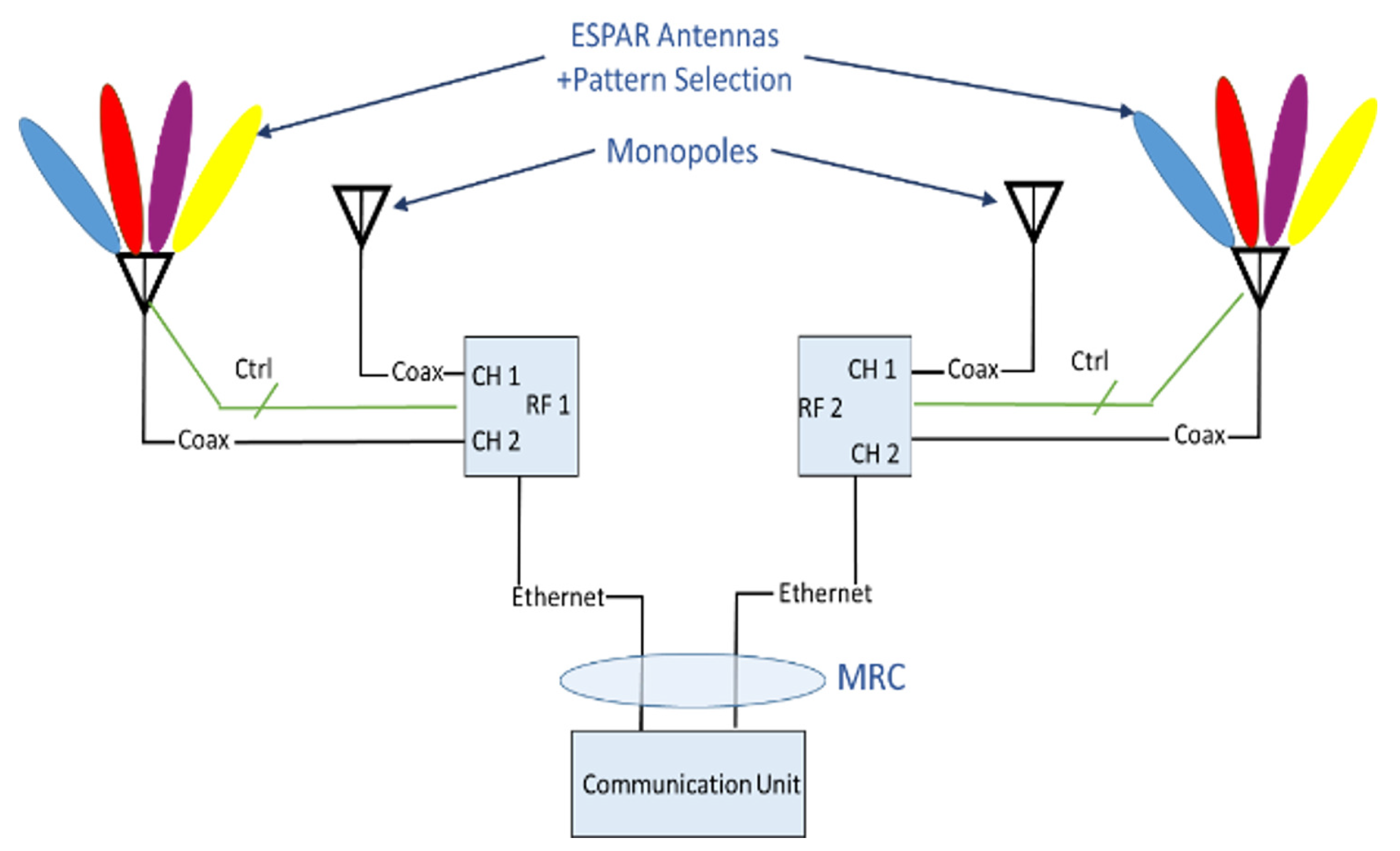
2.3. Diversity Concept
- it provides increased MIMO support with a limited number of RF chains;
- it utilizes small, compact antennas able to be installed in many parts of the vehicle, which can improve links’ quality (with other vehicles or the infrastructure);
- it is designed to minimize the need for extra cabling, especially regarding the rigid and lossy RF cables—a significant requirement imposed by the auto-manufacturers;
- it provides significant diversity and beam-tracking gain on-top (and without modification) of the generally simplistic V2X protocols that do not yet explicitly support multi-antenna configurations;
- it allows the simultaneous improved support for both broadcast and unicast ITS services. The latter ones consist of a set of broadcast single message services, but also a set of peer-to-peer communication ones. Moreover, some types of future single message services (e.g., platooning) may benefit by beam steering/tracking optimizing transmission along the direction of the platoon movement.
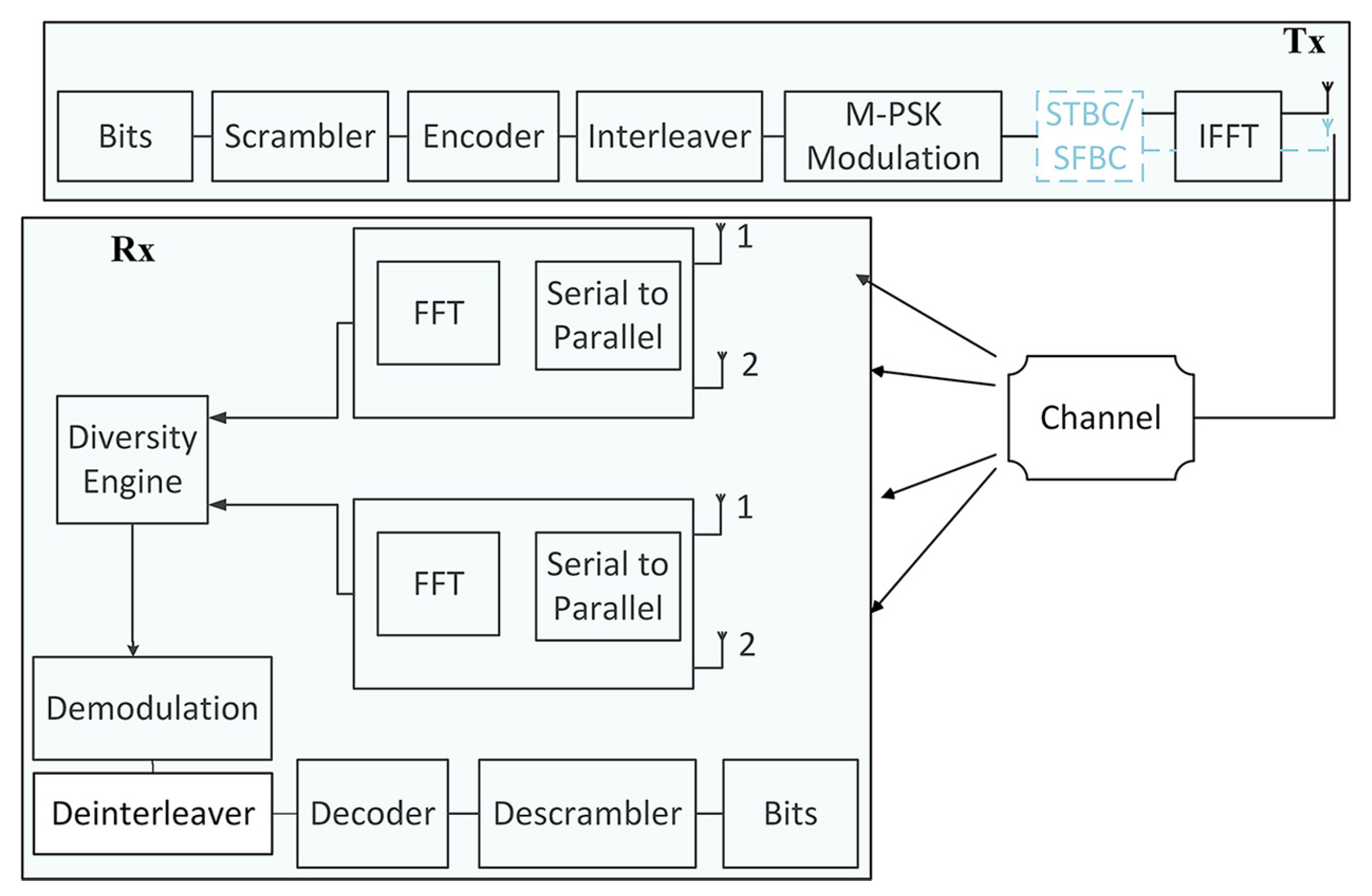
3. Detailed Description of the Diversity Engine
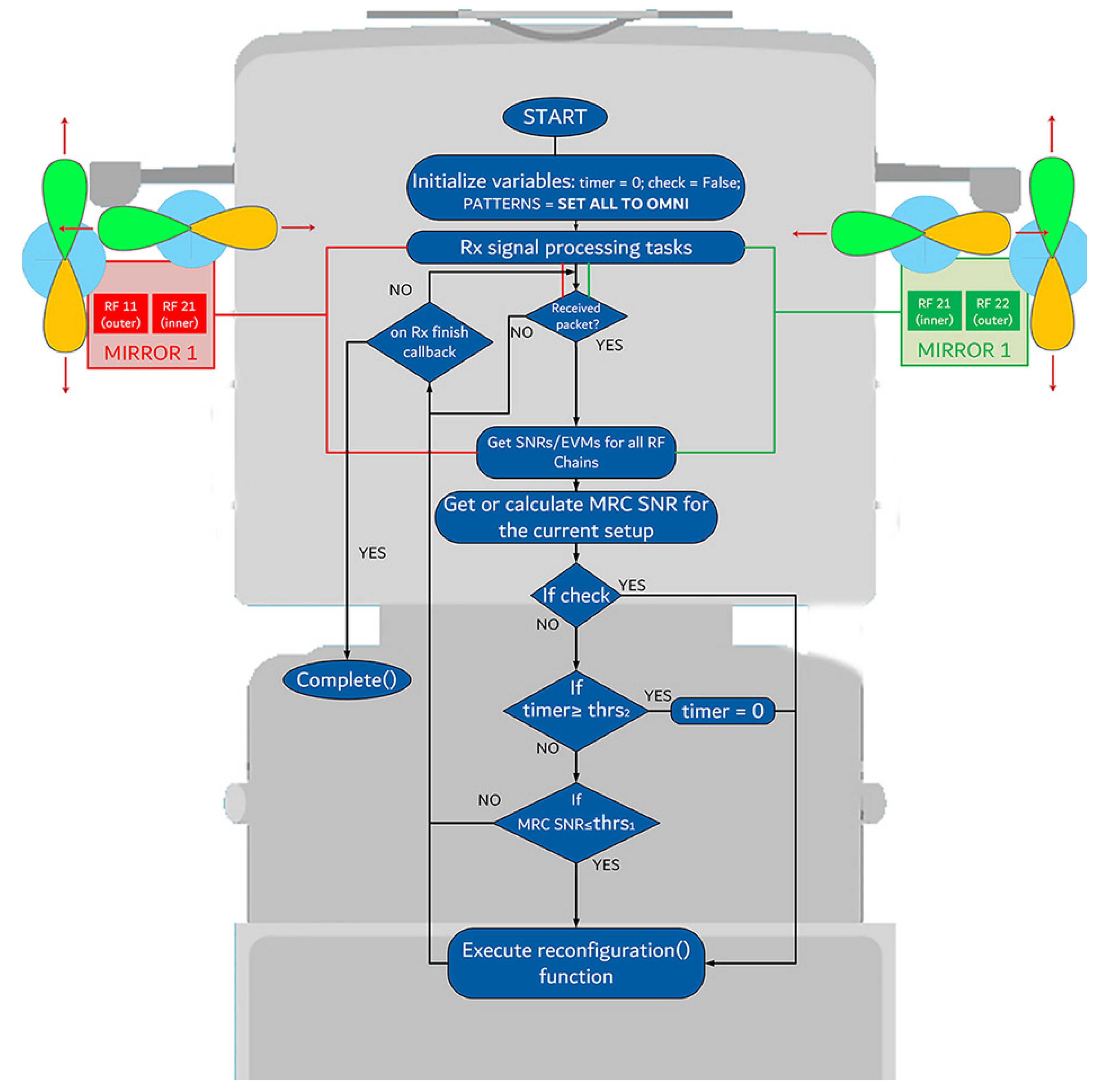
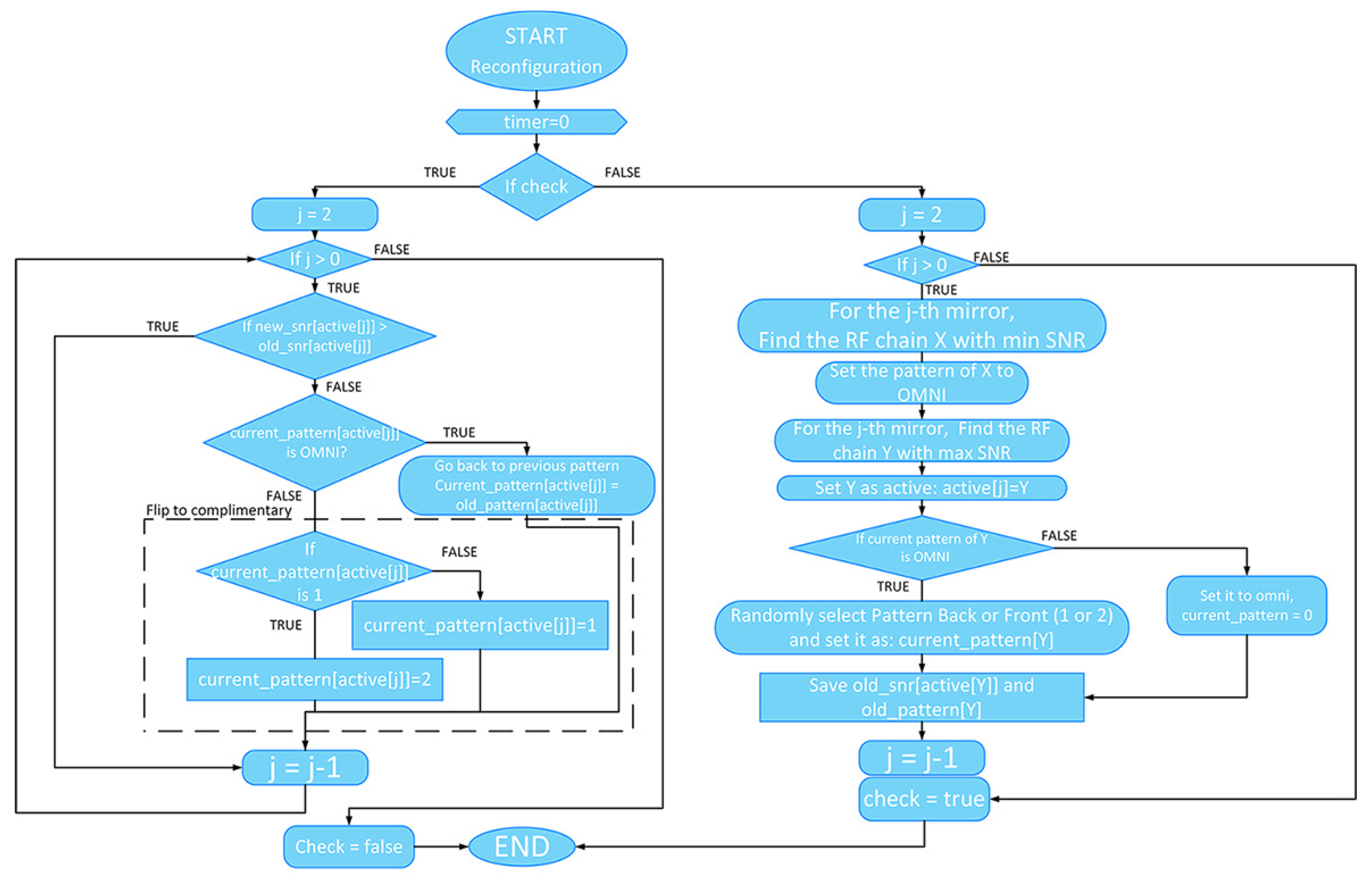
- The pattern reconfiguration for the RF chains depends on the MRC output value; if it falls below a predefined threshold (), the reconfiguration procedure will initiate. Therefore, the pattern combination will not change if the SNR of the current selection does not fall below , despite the fact that a different combination with better performance may exist. In this context, continuous unnecessary changes are avoided, which results to a complexity reduction and avoidance of synchronization problems. At the same time, important performance degradation is avoided, since the use of ensures that the MRC-SNR remains relatively high.
- When on transmit-mode, the transceiver will select either the omni pattern for single message broadcast, or the pattern combination that was decided during reception in order to optimize the link between B and A.
- On the other hand, if reconfigurations have not been performed for more than received packets (parameter timer of Figure 6, the diversity engine will attempt to reconfigure and search for a better pattern combination, despite the fact that the SNR threshold is not violated. The reconfiguration trigger through the timer is used in order to periodically force the system to search for better pattern combinations and improve performance, even if the SNR remains relatively high.
4. Performance Evaluation, Field Tests, and Results
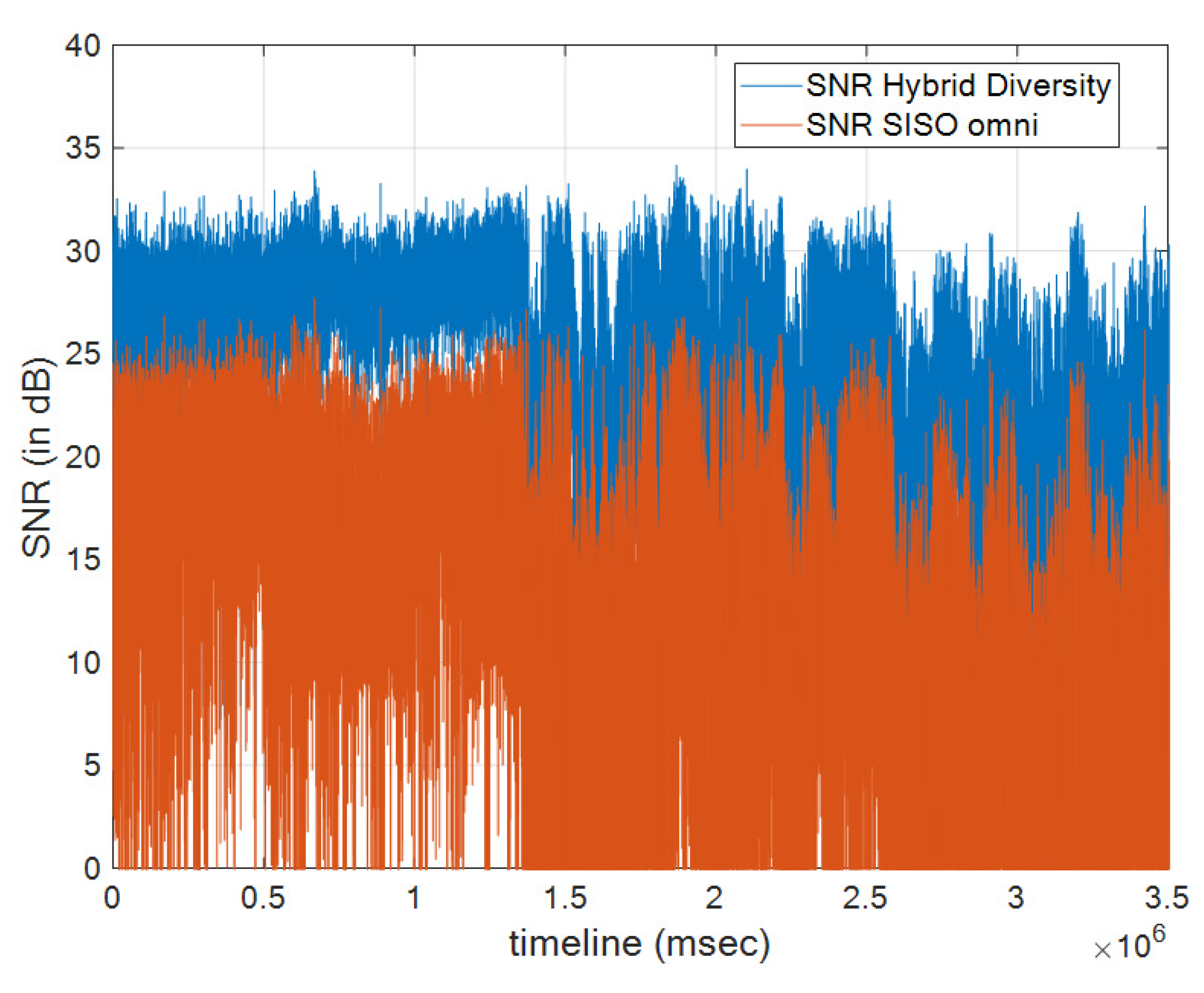
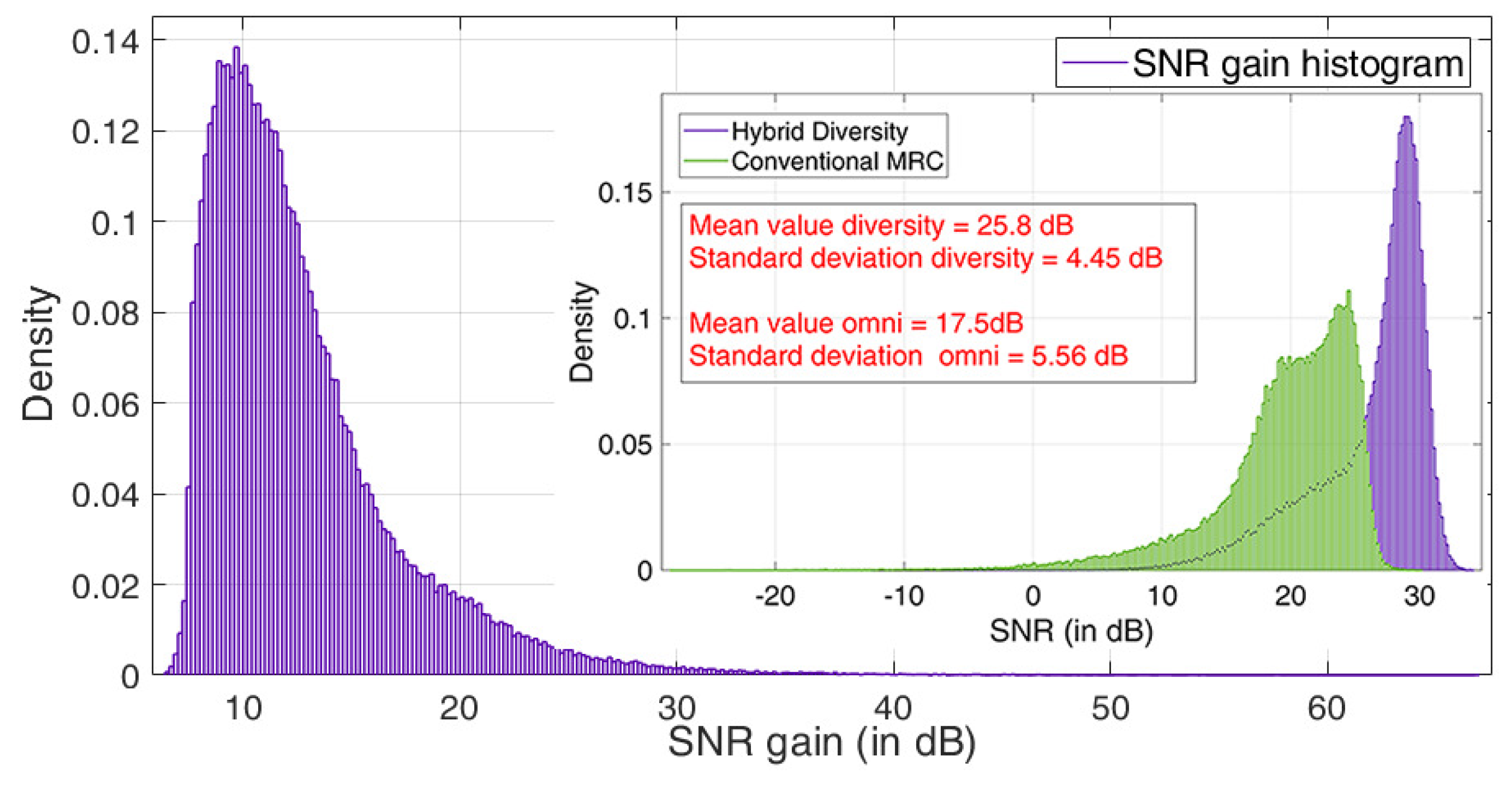
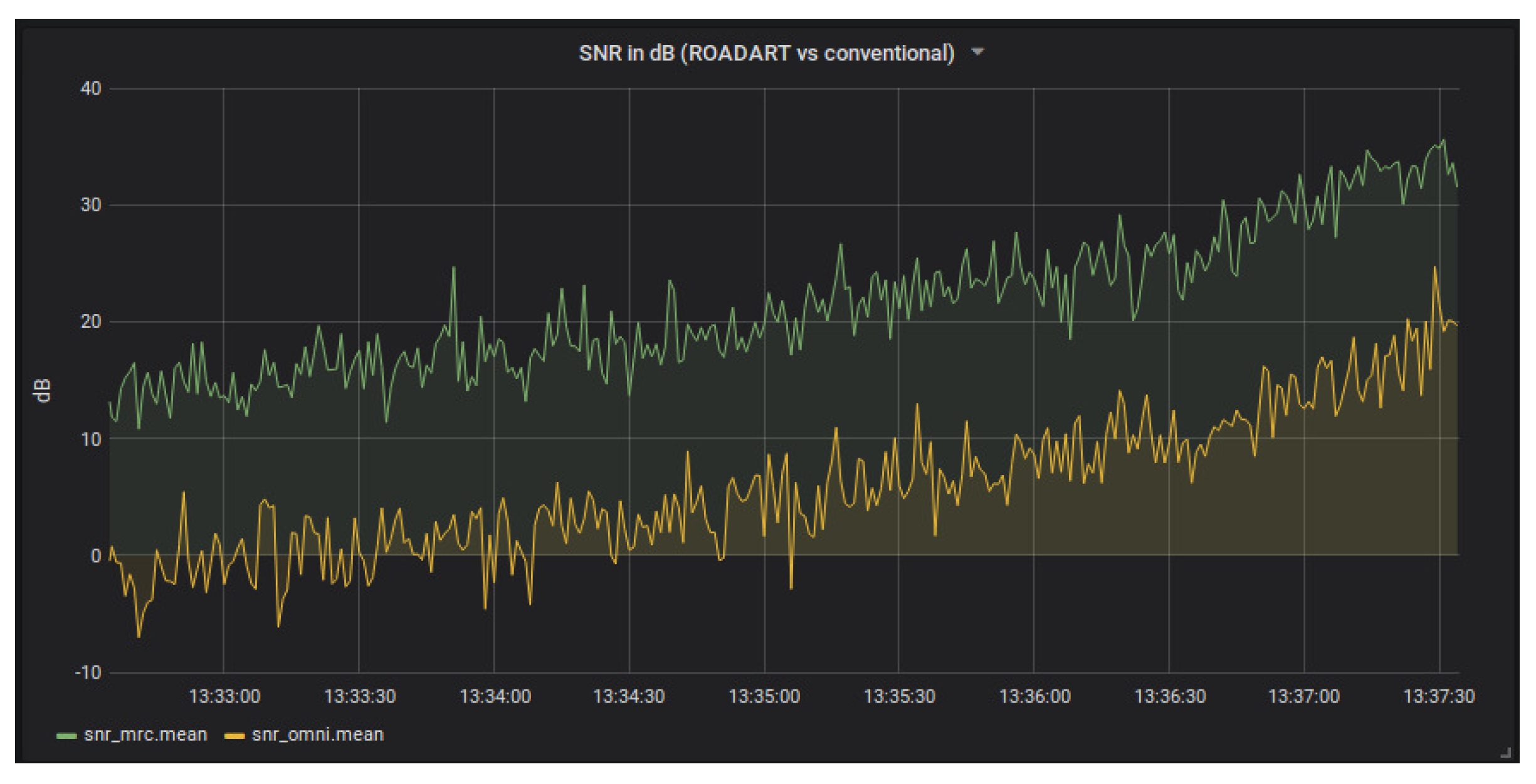
- Output SNR;
- SNR diversity gain, as compared to a single-input-single output omni (SISO-OMNI);
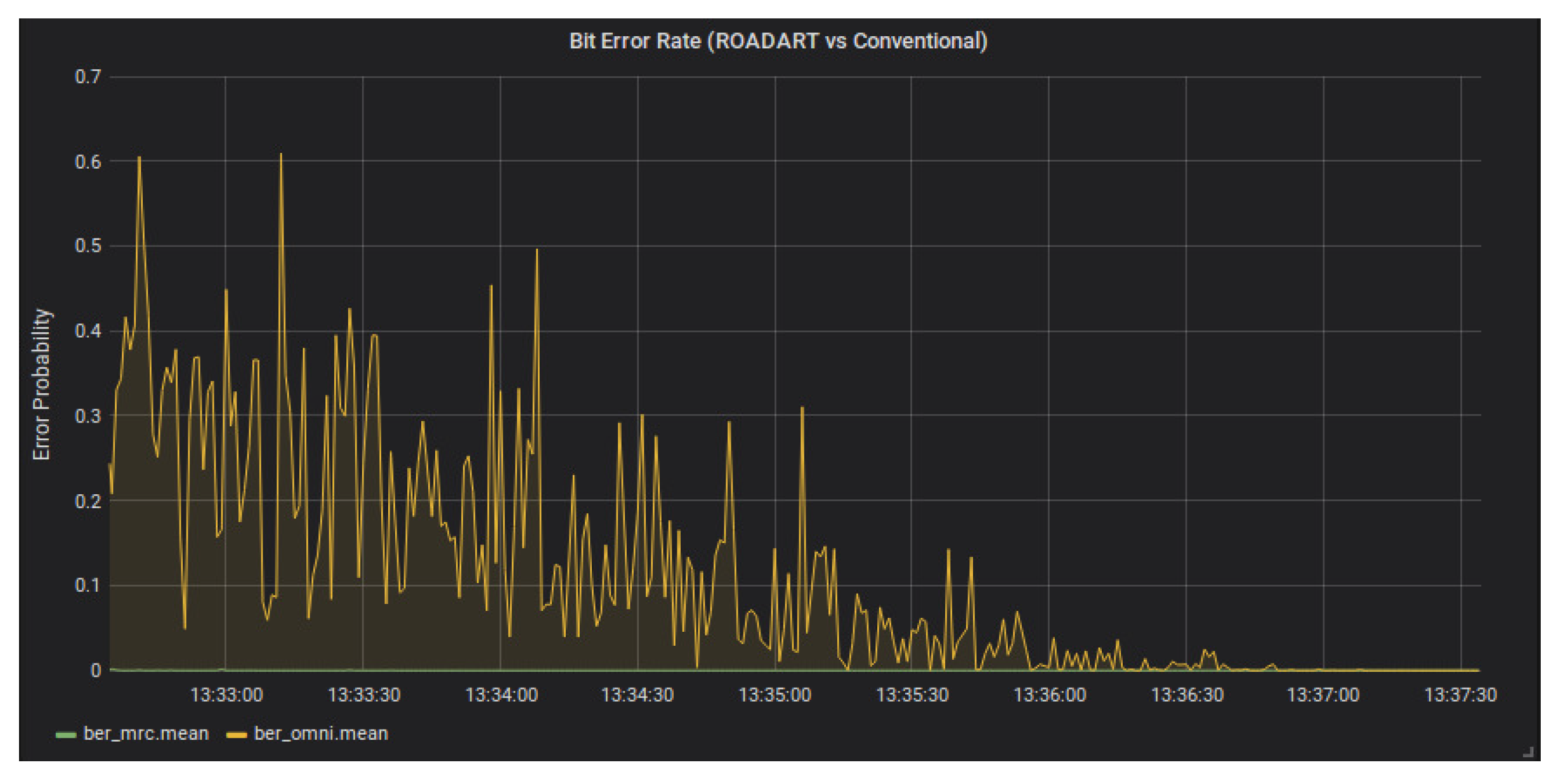
- Bit error rate (BER);
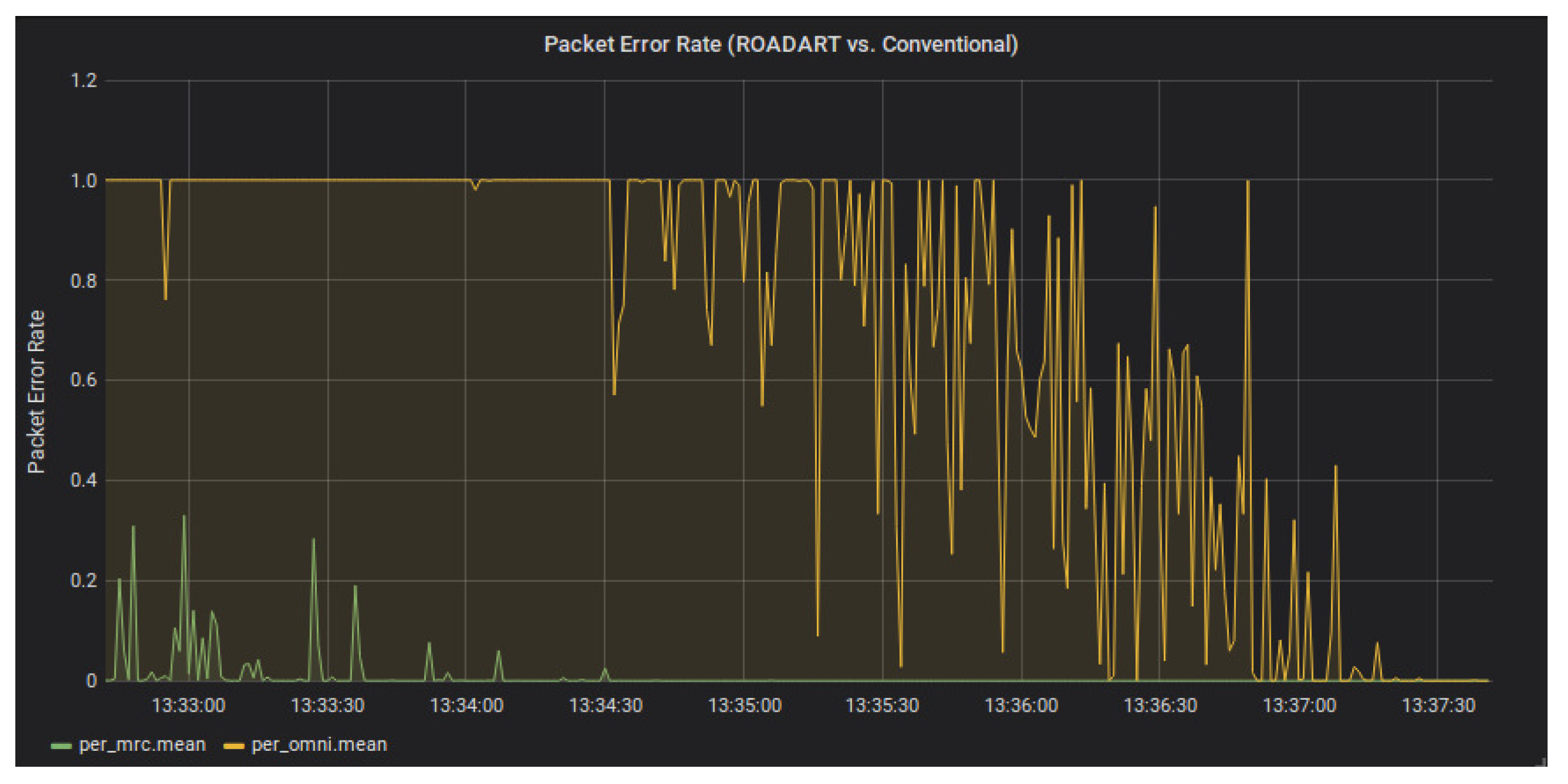
- Packet error rate (PER);
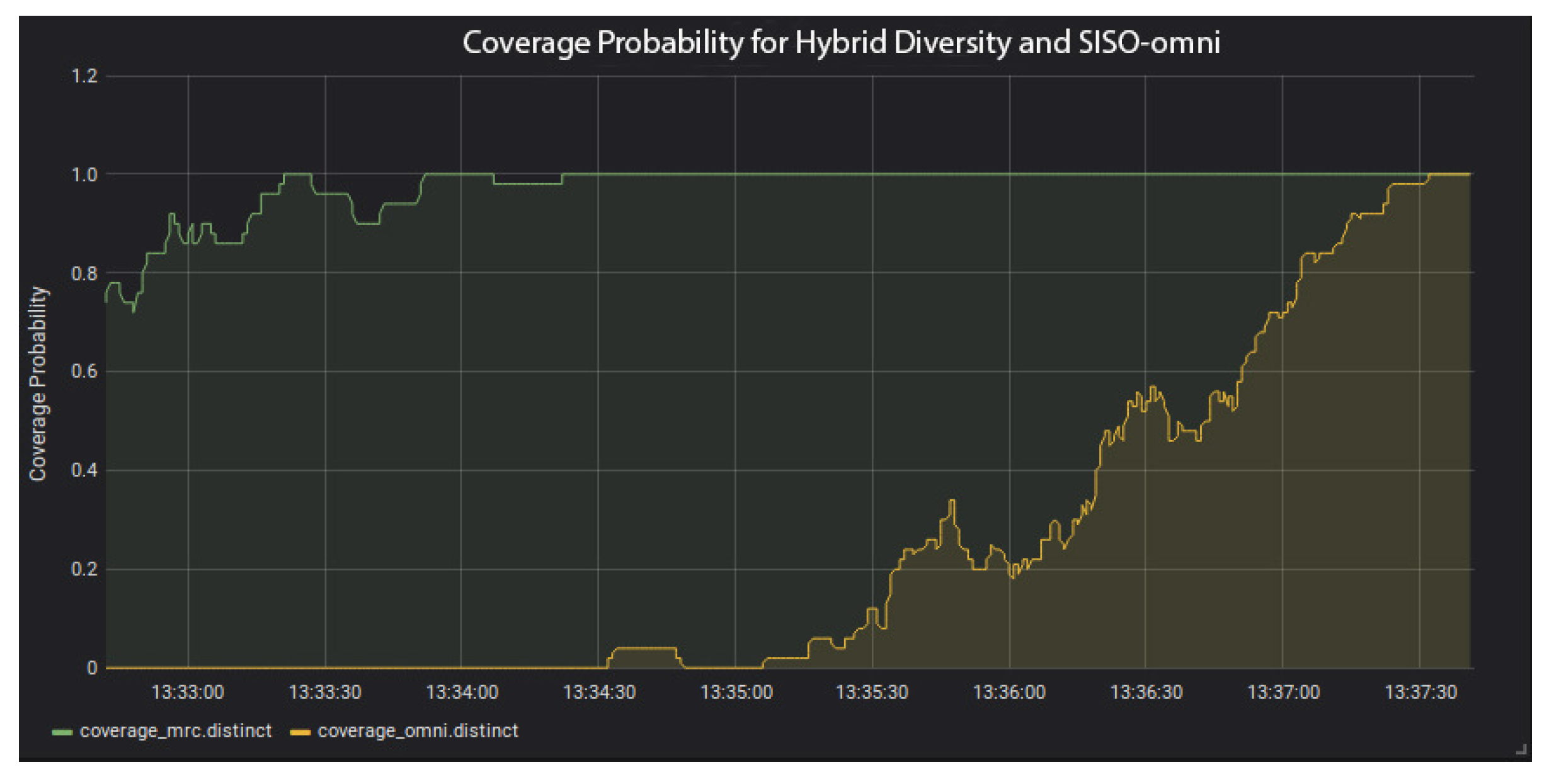
- Coverage probability;
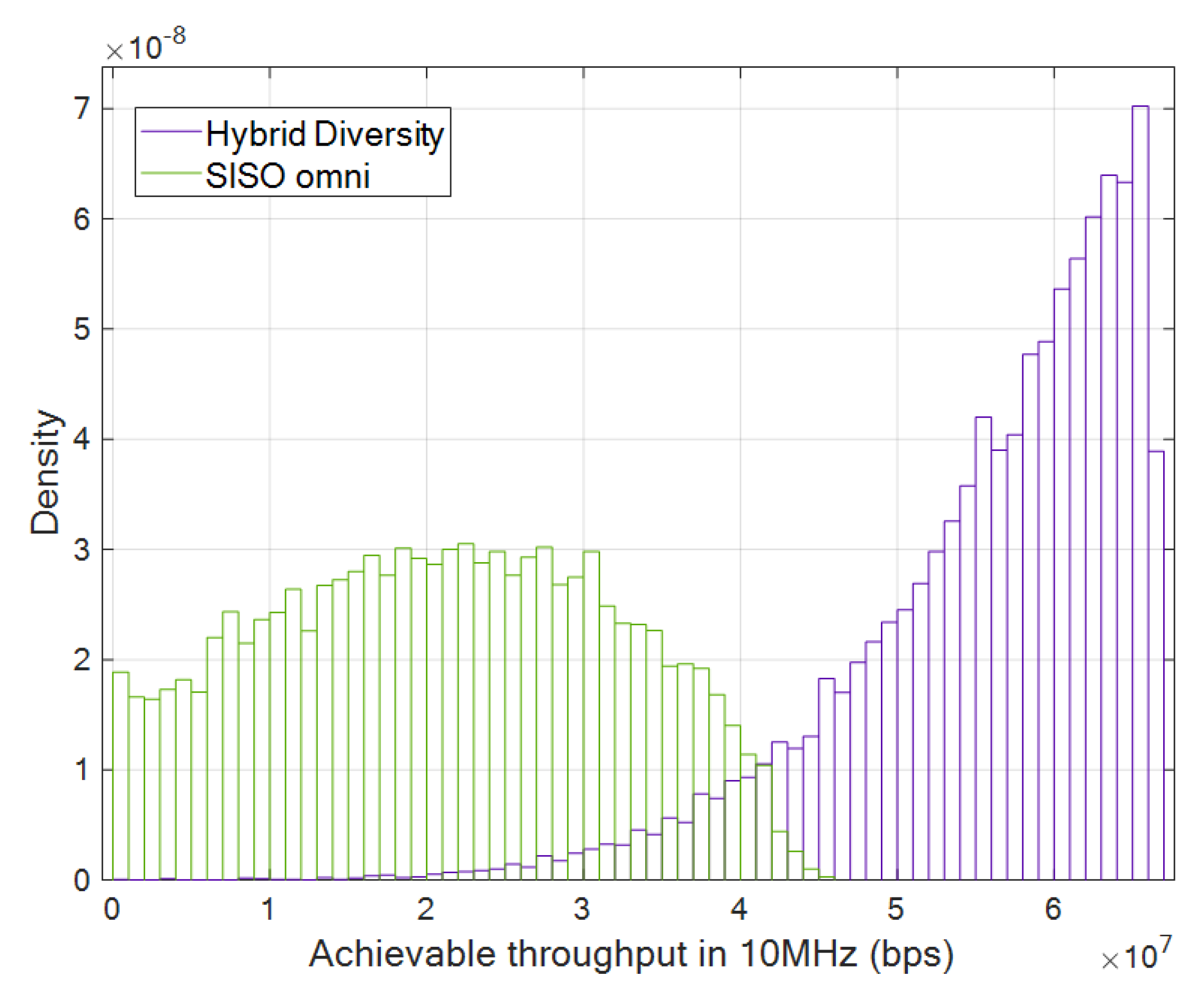
- Channel capacity/Achievable throughput;
- Latency.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AGC | Automatic gain controller |
| BER | Bit error rate |
| EGC | Equal gain combining |
| ESPAR | Electronically switched parasitic array radiator |
| EVM | Error vector magnitude |
| FFT | Fast Fourier transform |
| ITS | Intelligent transportation systems |
| IFFT | Inverse fast Fourier transform |
| KPI | Key performance indicators |
| LLR | Log likelihood ratio |
| MIMO | Multiple-input multiple-output |
| MMSE | Minimum mean square error |
| MRC | Maximal ratio combiner |
| NR | New radio |
| OFDM | Orthogonal frequency division multiplexing |
| Probability density function | |
| RF | Radio frequency |
| QPSK | Quadrature phase-shift keying |
| RAN | Radio access network |
| SFBC | Space-frequency block coding |
| SISO | Single-input single-output |
| SNR | Signal-to-noise ratio |
| STBC | Space-time block coding |
| T2T | Truck-to-truck |
| V2V | Vehicle-to-vehicle |
| V2X | Vehicle-to-everything |
References
- Yuan, W.; Li, S.; Xiang, L.; Ng, D.W.K. Distributed Estimation Framework for Beyond 5G Intelligent Vehicular Networks. IEEE Open J. Veh. Technol. 2020, 1, 190–214. [Google Scholar] [CrossRef]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J.; Xu, W. Connected Roads of the Future: Use Cases, Requirements, and Design Considerations for Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2018, 13, 110–123. [Google Scholar] [CrossRef]
- Masini, B.M.; Silva, C.M.; Balador, A. The Use of Meta-Surfaces in Vehicular Networks. J. Sens. Actuator Netw. 2020, 9, 15. [Google Scholar] [CrossRef] [Green Version]
- Busari, S.A.; Huq, K.M.S.; Mumtaz, S.; Rodriguez, J. Terahertz massive MIMO for beyond-5G wireless communication. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Mumtaz, S.; Saidul Huq, K.M.; Rodriguez, J. Direct mobile-to-mobile communication: Paradigm for 5G. IEEE Wirel. Commun. 2014, 21, 14–23. [Google Scholar] [CrossRef]
- Intelligent Transport Systems (ITS). European profile standard on the physical and medium access layer of 5 GHz ITS. Draft ETSI ES 2009, 202, V0. [Google Scholar]
- 3GPP News: LTE Support for the Connected Car. 2019. Available online: https://www.3gpp.org/news-events/1675-lte_automotive (accessed on 30 June 2020).
- Bazzi, A.; Cecchini, G.; Menarini, M.; Masini, B.M.; Zanella, A. Survey and perspectives of vehicular wi-fi versus sidelink cellular-V2X in the 5G era. Future Internet 2019, 11, 122. [Google Scholar] [CrossRef] [Green Version]
- Zaidi, A.A.; Baldemair, R.; Moles-Cases, V.; He, N.; Werner, K.; Cedergren, A. OFDM Numerology Design for 5G New Radio to Support IoT, eMBB, and MBSFN. IEEE Commun. Standards Mag. 2018, 2, 78–83. [Google Scholar] [CrossRef]
- Han, S.; Zhao, K.; Yang, L.Q.; Cheng, X. Performance evaluation for multi-antenna vehicular communication based on IEEE 802.11 p standard. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar]
- Karlsson, K.; Carlsson, J.; Larsson, M.; Bergenhem, C. Evaluation of the V2V channel and diversity potential for platooning trucks. In Proceedings of the 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 10–15 April 2016; pp. 1–5. [Google Scholar]
- Crawford, J.; Chatziantoniou, E.; Ko, Y. On the SEP Analysis of OFDM Index Modulation With Hybrid Low Complexity Greedy Detection and Diversity Reception. IEEE Trans. Veh. Technol. 2017, 66, 8103–8118. [Google Scholar] [CrossRef] [Green Version]
- Neira, E.C.; Carlsson, J.; Karlsson, K.; Ström, E.G. Combined LTE and IEEE 802.11 p antenna for vehicular applications. In Proceedings of the 2015 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 13–17 April 2015; pp. 1–5. [Google Scholar]
- Bithas, P.S.; Aspreas, A.; Kanatas, A.G. A new reconfigurable antenna scheme and its application to vehicle-to-vehicle communications. In Proceedings of the 2016 IEEE 12th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), New York, NY, USA, 17–19 October 2016; pp. 1–6. [Google Scholar]
- Phan-Huy, D.T.; Sternad, M.; Svensson, T. Making 5G adaptive antennas work for very fast moving vehicles. IEEE Intell. Transp. Syst. Mag. 2015, 7, 71–84. [Google Scholar] [CrossRef]
- Ahmed, S.H.; Mu, D.; Kim, D. Improving Bivious Relay Selection in Vehicular Delay Tolerant Networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 987–995. [Google Scholar] [CrossRef]
- Geissler, M.; Scharwies, K.; Christ, J. Intelligent antenna systems for cars. In Proceedings of the GeMiC 2014, German Microwave Conference, Aachen, Germany, 10–12 March 2014; pp. 1–3. [Google Scholar]
- Rabinovich, V.; Alexandrov, N. Compact car-mounted arrays. In Antenna Arrays and Automotive Applications; Springer: Berlin, Germany, 2013; pp. 1–20. [Google Scholar]
- Thiel, A.; Klemp, O.; Paiera, A.; Bernadó, L.; Karedal, J.; Kwoczek, A. In-situ vehicular antenna integration and design aspects for vehicle-to-vehicle communications. In Proceedings of the Fourth European Conference on Antennas and Propagation, Barcelona, Spain, 12–16 April 2010; pp. 1–5. [Google Scholar]
- Liu, F.; Zhang, Z.; Chen, W.; Feng, Z.; Iskander, M.F. An endfire beam-switchable antenna array used in vehicular environment. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 195–198. [Google Scholar] [CrossRef]
- Schack, M.; Kornek, D.; Slottke, E.; Kürner, T. Analysis of channel parameters for different antenna configurations in vehicular environments. In Proceedings of the IEEE 72nd Vehicular Technology Conference-Fall, Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar]
- Guan, N.; Tayama, H.; Ueyama, M.; Yoshijima, Y.; Chiba, H. A roof automobile module for LTE-MIMO antennas. In Proceedings of the IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Turin, Italy, 7–11 September 2015; pp. 387–391. [Google Scholar]
- Li, X.L.; Yang, G.M.; Jin, Y.Q. Isolation enhancement of wideband vehicular antenna array using fractal decoupling structure. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1799–1803. [Google Scholar] [CrossRef]
- Thiel, A.; Ekiz, L.; Klemp, O.; Schultz, M. Automotive grade MIMO antenna setup and performance evaluation for LTE-communications. In Proceedings of the International Workshop on Antenna Technology (iWAT), Karlsruhe, Germany, 4–6 March 2013; pp. 171–174. [Google Scholar]
- Harrington, R. Reactively controlled directive arrays. IEEE Trans. Antennas Propag. 1978, 26, 390–395. [Google Scholar] [CrossRef]
- Ohira, T.; Gyoda, K. Electronically steerable passive array radiator antennas for low-cost analog adaptive beamforming. In Proceedings of the 2000 IEEE International Conference on Phased Array Systems and Technology (Cat. No.00TH8510), Dana Point, CA, USA, 21–25 May 2000; pp. 101–104. [Google Scholar]
- Kalis, A.; Kanatas, A.G.; Papadias, C.B. A Novel Approach to MIMO Transmission Using a Single RF Front End. IEEE J. Sel. Areas Commun. 2008, 26, 972–980. [Google Scholar] [CrossRef]
- Marantis, L.; Maliatsos, K.; Kanatas, A. ESPAR antenna positioning for truck-to-truck communication links. In Proceedings of the 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 10–15 April 2016; pp. 1–5. [Google Scholar]
- ROADART Project. Report on Integration. Technical Report. 2018. Available online: https://www.cbs.nl/en-gb/publication/2018/47/annual-report-on-integration-2018 (accessed on 30 June 2020).
- Marantis, L.; Paraskevopoulos, A.; Rongas, D.; Kanatas, A.; Oikonomopoulos-Zachos, C.; Voell, S. A printed monopole ESPAR antenna for Truck-to-Truck communications. In Proceedings of the 2017 International Workshop on Antenna Technology: Small Antennas, Innovative Structures, and Applications (iWAT), Athens, Greece, 1–3 March 2017; pp. 239–242. [Google Scholar]
- CES. Software. 2019. Available online: www.cst.com (accessed on 30 June 2020).
- Marantis, L.; Rongas, D.; Paraskevopoulos, A.; Oikonomopoulos-Zachos, C.; Kanatas, A. Pattern reconfigurable ESPAR antenna for vehicle-to-vehicle communications. IET Microw. Antennas Propag. 2017, 12, 280–286. [Google Scholar] [CrossRef]
- Marantis, L.; Maliatsos, K.; Oikonomopoulos-Zachos, C.; Rongas, D.K.; Paraskevopoulos, A.; Aspreas, A.; Kanatas, A.G. The pattern selection capability of a printed ESPAR antenna. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 922–926. [Google Scholar]















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maliatsos, K.; Marantis, L.; Bithas, P.S.; Kanatas, A.G. Hybrid Multi-Antenna Techniques for V2X Communications—Prototyping and Experimentation. Telecom 2020, 1, 80-95. https://doi.org/10.3390/telecom1020007
Maliatsos K, Marantis L, Bithas PS, Kanatas AG. Hybrid Multi-Antenna Techniques for V2X Communications—Prototyping and Experimentation. Telecom. 2020; 1(2):80-95. https://doi.org/10.3390/telecom1020007
Chicago/Turabian StyleMaliatsos, Konstantinos, Leonidas Marantis, Petros S. Bithas, and Athanasios G. Kanatas. 2020. "Hybrid Multi-Antenna Techniques for V2X Communications—Prototyping and Experimentation" Telecom 1, no. 2: 80-95. https://doi.org/10.3390/telecom1020007