3. Results
Table 3 compares the two electronic measuring devices, the digital Picoscope 3204D MSO and the VCDS HEX-V2, based on four different criteria: price, sampling rate, parallel measurements and ease of use. The first criterion, price, refers to the financial outlay required to purchase each device. The acquisition costs of the Picoscope 3204D MSO are nearly double the costs of the VCDS HEX-V2. The second criterion, sampling rate, refers to the speed at which a meter converts an analogue signal into a digital signal. The Picoscope 3204D MSO is able to achieve a higher sampling rate of up to 1 GS/s, while the VCDS HEX-V2 is limited in sampling rate by the CAN protocol. The third criterion, parallel measurements, refers to how many measurements can be performed simultaneously. The Picoscope 3204D MSO can take two measurements at the same time, while the VCDS HEX-V2 allows unlimited parallel measurements. The fourth criterion, usage, refers to the user-friendliness of a measuring device. While the use of the VCDS HEX-V2 is considered easy and intuitive, the use of the Picoscope 3204D MSO is more sophisticated. This also correlates with the fifth criterion, the background knowledge. While the Picoscope is technically more complex, the measurements are more accurate and versatile. However, knowledge and understanding of the technical interactions in a car are necessary to interpret the resulting data. The VCDS, on the other hand, may be more accessible to non-professionals and requires less technical understanding, but is limited in its capabilities.
3.1. Start-Up Voltage Analysis:
The start-up voltage of a battery can be used to determine the state of charge of the respective battery. This is the first estimation whether the battery energy supply is still sufficient to start the engine.
Table 4 shows the voltage and the state of charge of the battery at rest (engine not running) measured by either the Picoscope or the VCDS.
For the Picoscope measurements, the values vary between 11.86 V and 12.42 V. Thus, the resulting voltage conditions of these batteries ranged from 30–70% according to
Table 2. One measurement (Sample 1) indicates a nearly discharged battery as a value of 12 V is assumed to be the threshold necessary to start the engine.
In comparison, most of the battery voltages determined via VCDS were below the critical value of 12 V, thus resulting in respective lower charge states of the batteries. In addition, for Sample 2, a battery voltage of 13.47 V was measured, which would correspond to a charge state of more than 100%.
Subsequently, the average difference between the Picoscope open-circuit voltage of the battery and the open-circuit voltage of the battery measured via the VCDS was determined (
Table 4). According to Formula (2), the average difference between both methods is 0.203 V. This difference in the voltage measured results in partially significant differences of the state of charge. As starting the engine of all cars was possible throughout all measurements, we assume the values determined via the Picoscope to be more precise and significant.
3.2. Compression within the Cranking Process
As already mentioned before, the Ohmic behaviour of the engine during start-up is also displayed in the course of the battery voltage. This time range corresponds to the compression of the four cylinders of the engine and its resolution needs to be sufficient to identify possible anomalies.
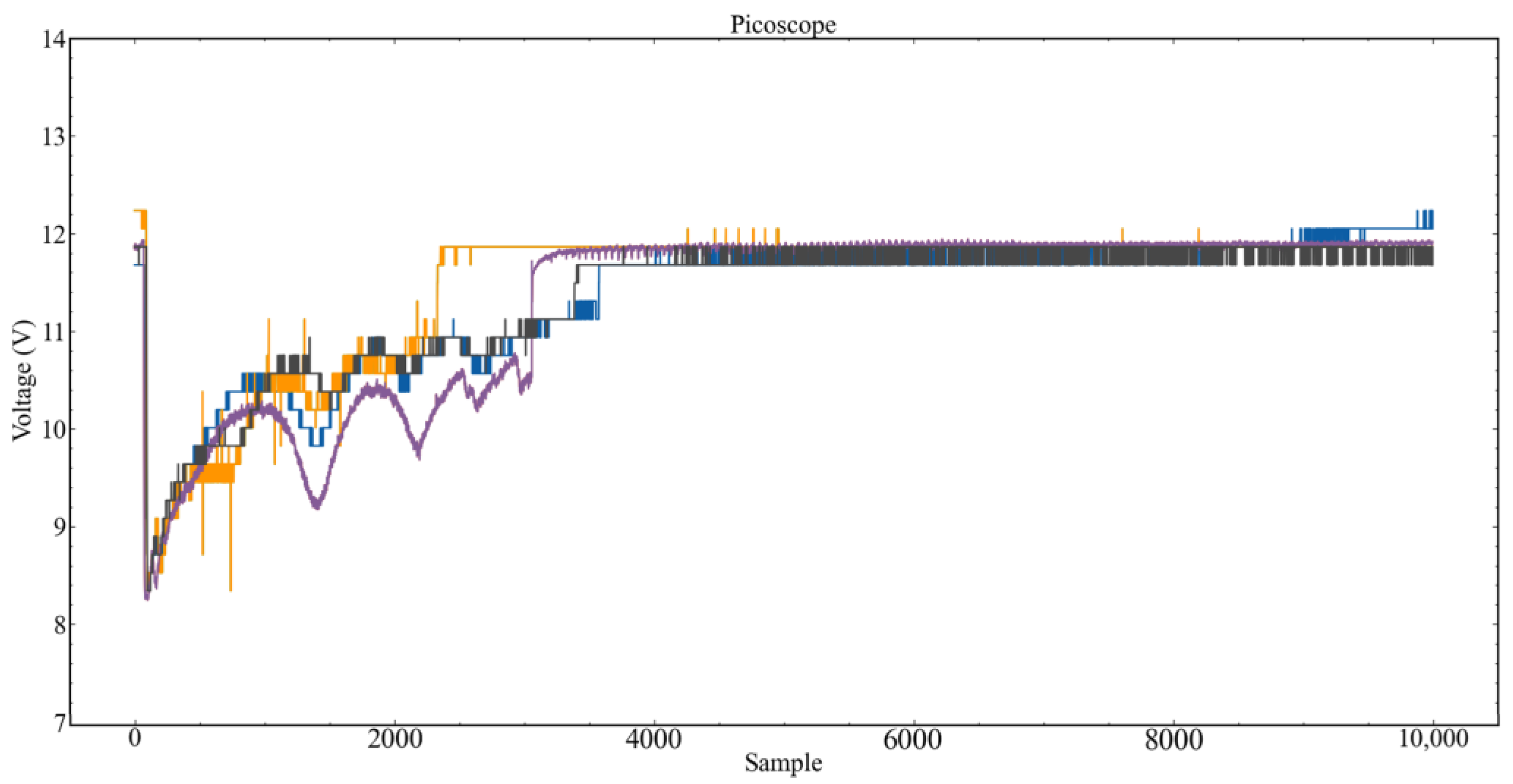
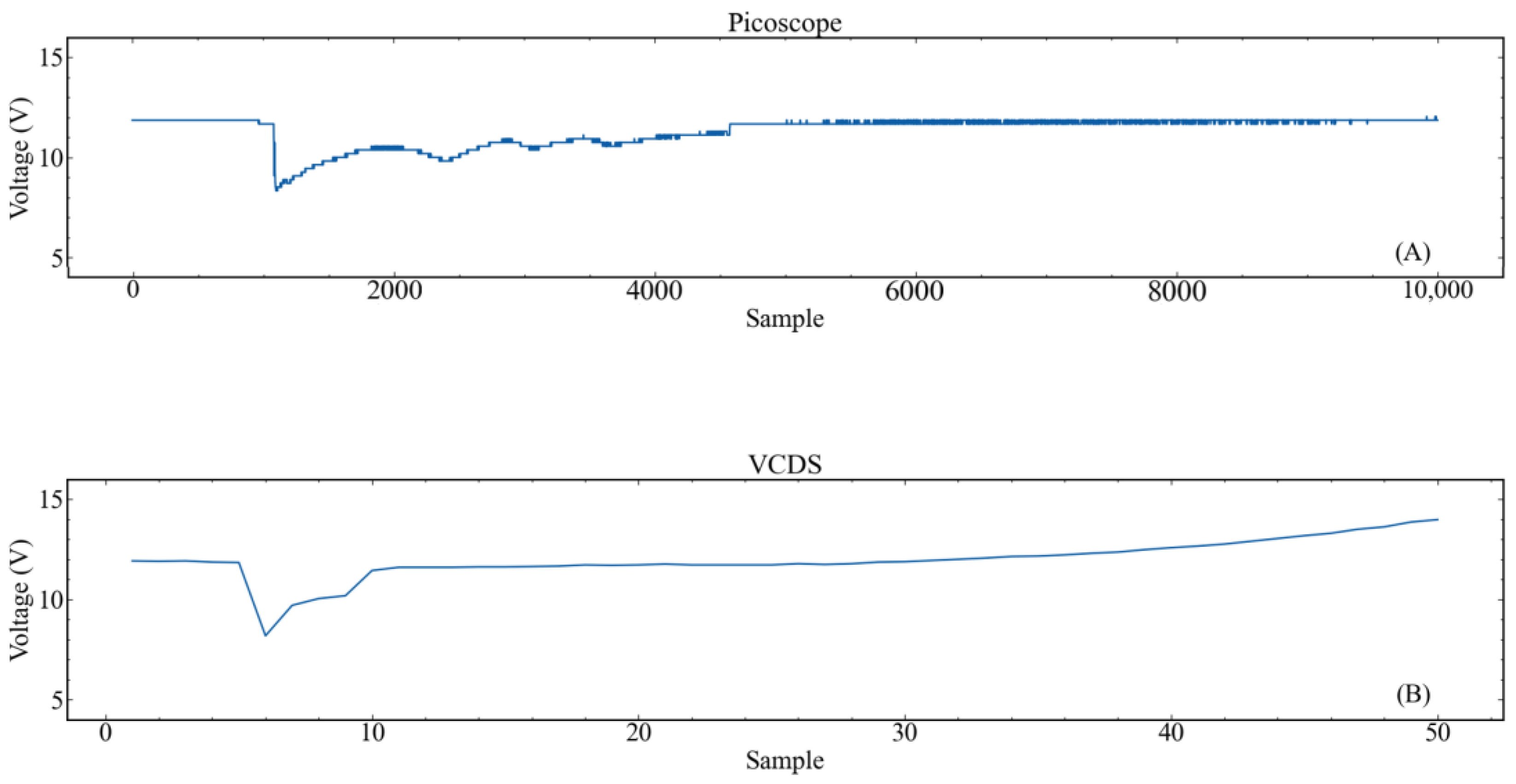
Figure 6 illustrates the comparison of the normalized data acquired by the oscilloscope and the data recorded via the OBD II interface. The signal received by the oscilloscope is characterized by a high noise intensity and a non-smooth voltage curve. Furthermore, a pronounced noise around the voltage curve can be observed. A special feature is the concise first voltage drop, as well as the recognizable compression phases of the following cylinders. Four voltage drops and the stepwise rise of the charge controller are visible. In contrast, the recording via the ECU shows a smoother voltage curve compared to the noisy signal captured by the oscilloscope. A particular feature is the clearly discernible first voltage drop, but only two further voltage drops can be guessed until the engine finally fires. Furthermore, the rise of the charge controller is exponential and smooth and there is no noise around the voltage curve.
In the following text, the time frame of the first compression to the final ignition of the engine is examined. A short period before starting the starter engine is considered for the compression of the first cylinder until the final ignition of the engine.
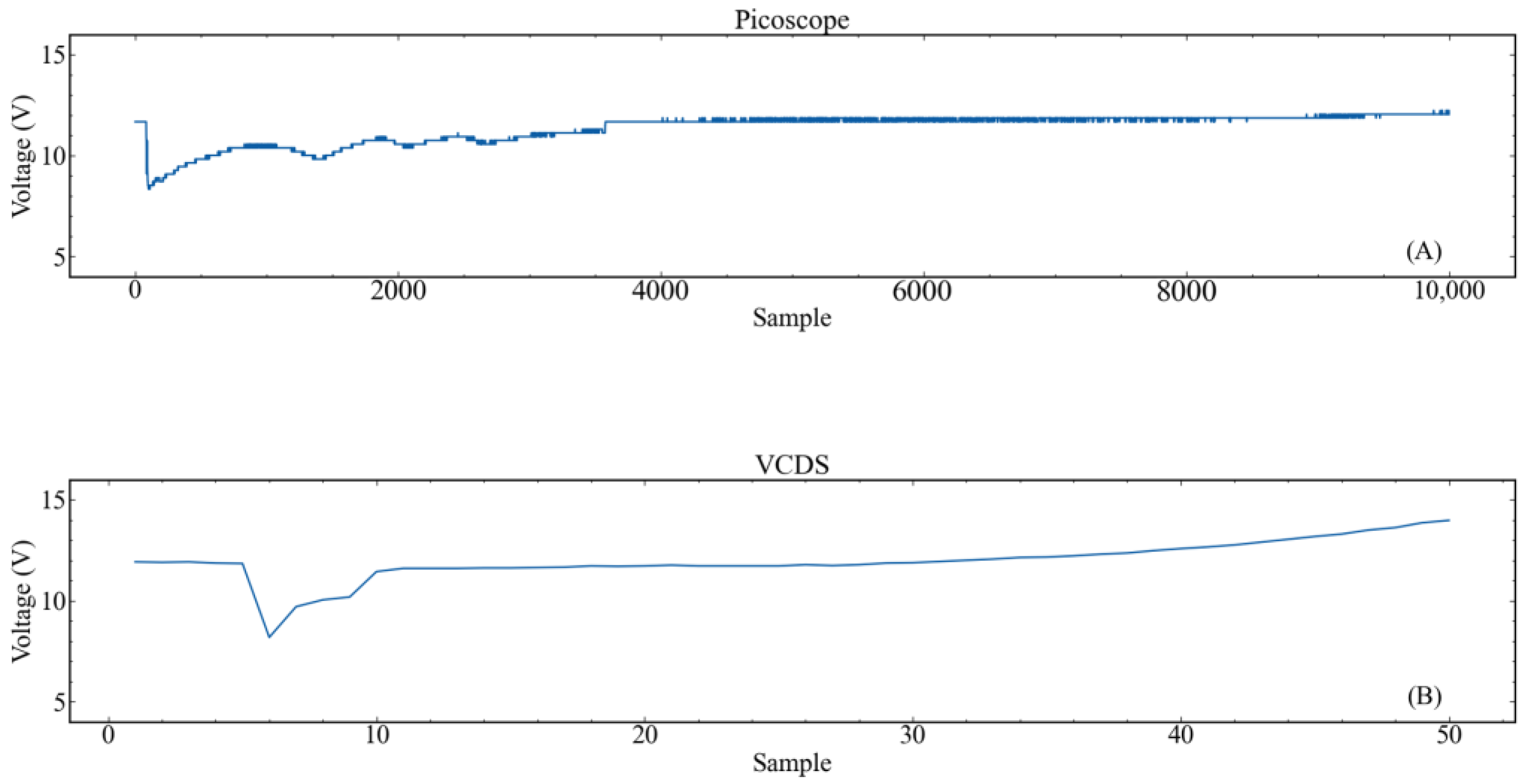
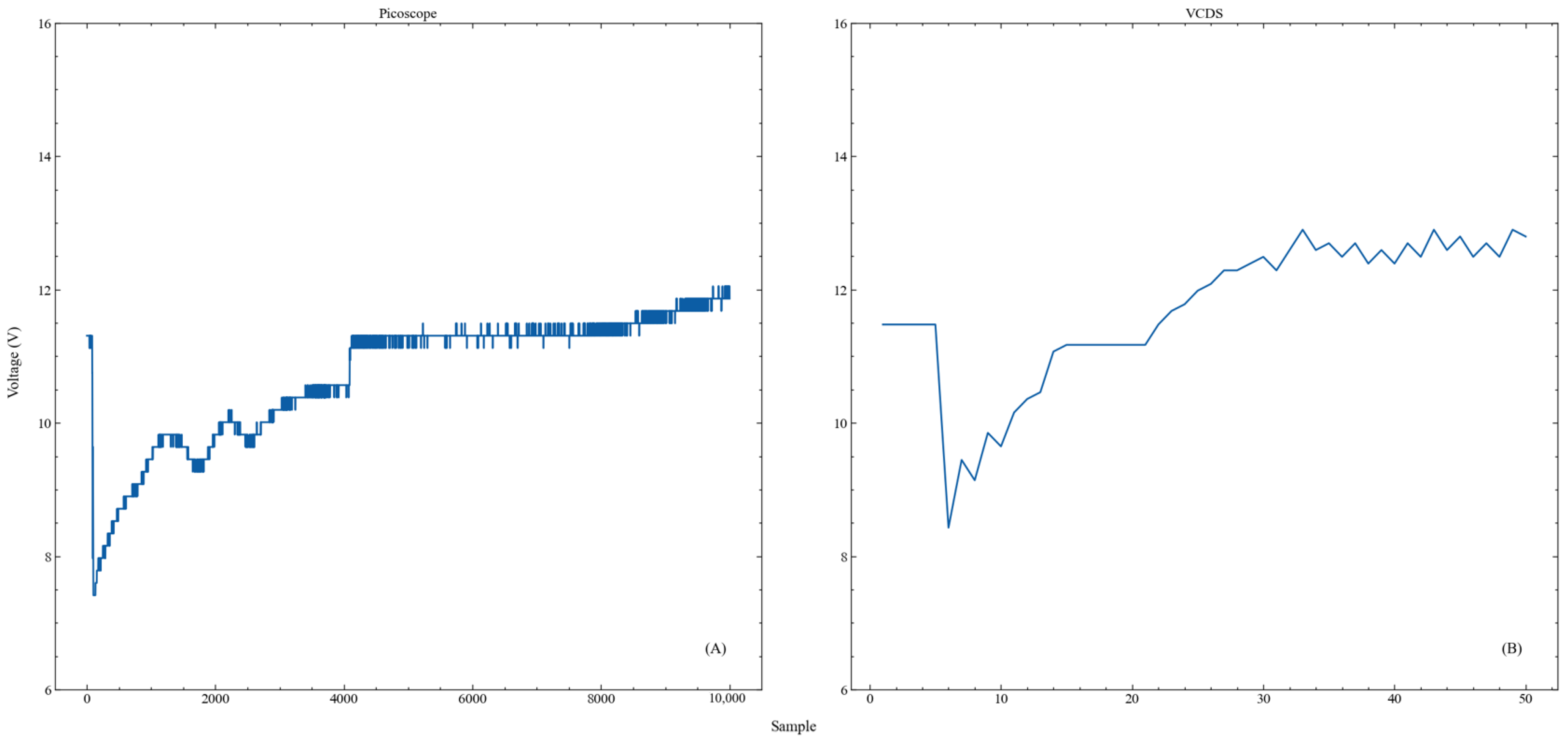
Figure 7A shows the time frame of the first compression recorded by the Picoscope compared to the same measurement recorded via the OBD II (
Figure 7B) interface. In comparison, it is noticeable that the individual compressions of the cylinders within the OBD measurement are not as detailed as for the oscilloscope measurement. Nevertheless, the time of the greatest voltage drop is still recognizable. This trend can be observed in all measurements.
3.3. Charging Voltage Analysis
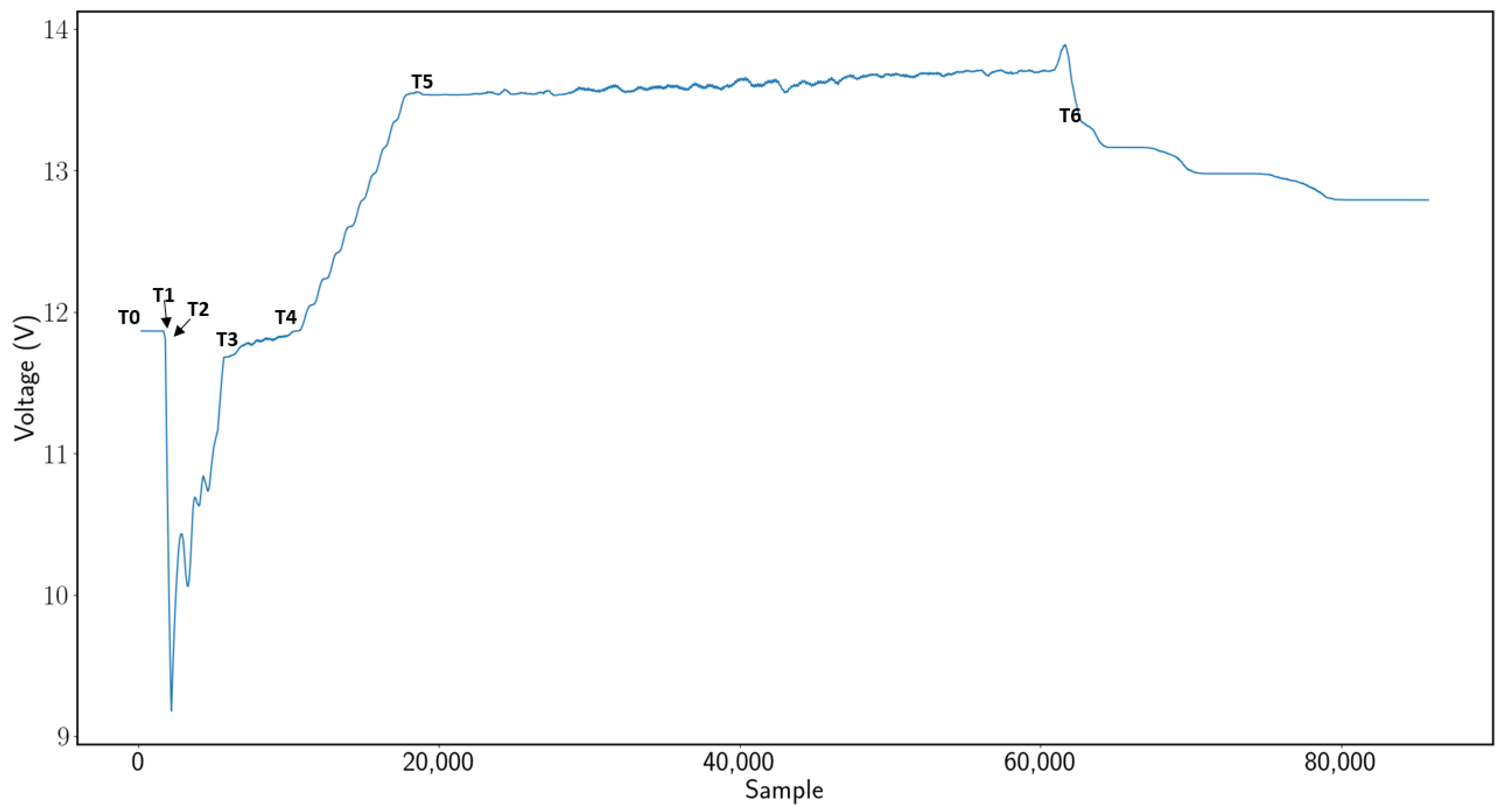
After the engine starts-up, the battery needs to be recharged to regain the consumed energy. The resulting charging voltage (compare T5 in
Figure 2) can be used as an indicator as to whether the respective charging systems are properly working or not.
For both detection methods, charging voltages of around 14 V were measured (compare
Table 5). However, the Picoscope displays an average of 0.11 V lower battery charge voltage than the VCDS.
3.4. Graph Similarity
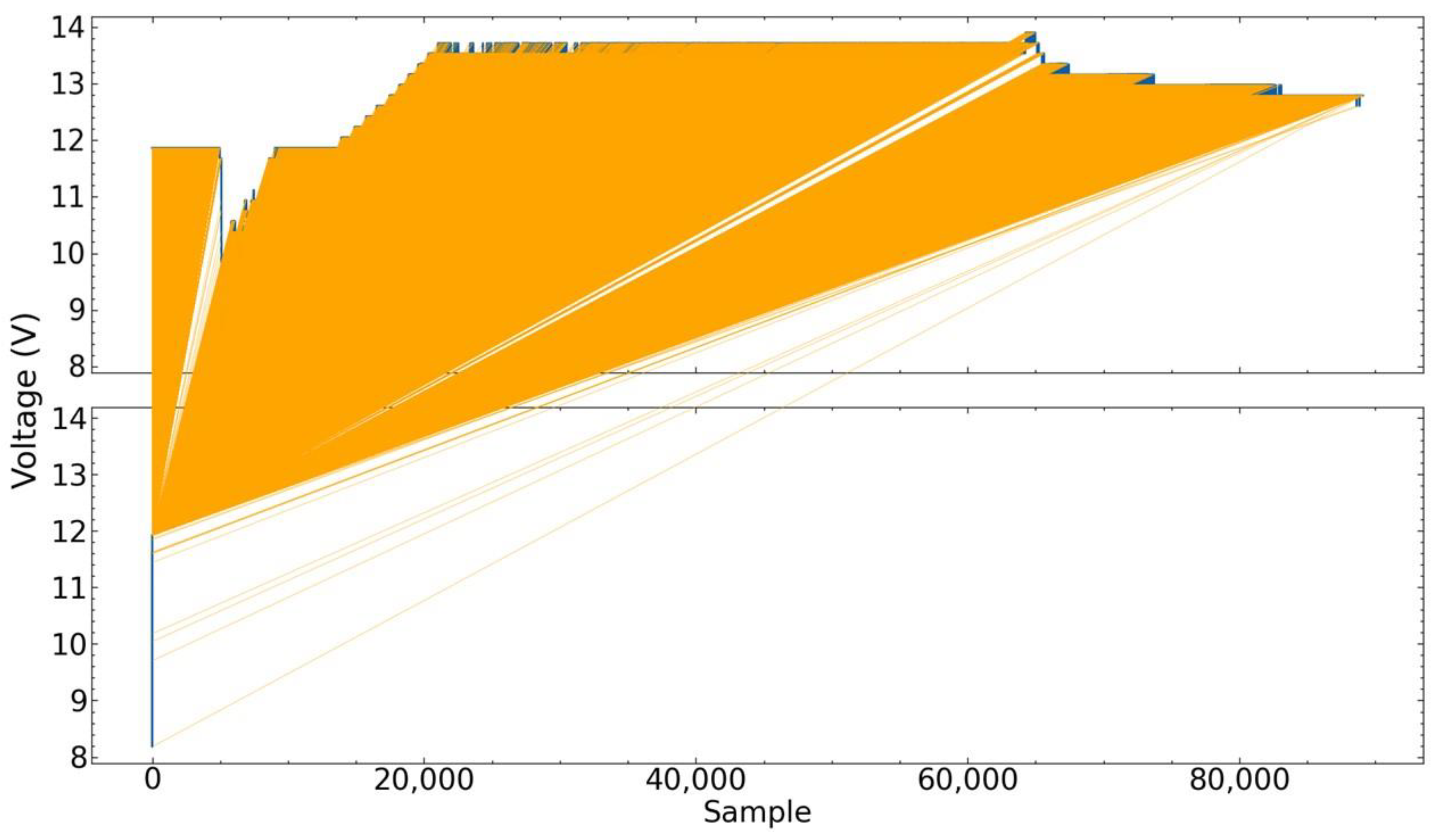
To perform a comparative analysis of the similarities between two graphs, the Dynamic Time Warping (DTW) approach was applied. However, this method is limited to the comparison of datasets for one car. Exemplarily, the DTW result for Sample Five is shown and the calculated DTW value is 532.4.
This indicates a very low similarity between the two graphs. The graphical representation also supports the statement about the low similarity of the two datasets and is shown in
Figure 8. The upper part of the graph represents the cranking process recorded by Picoscope and the lower part of the graph represents the cranking process measured by VCDS.
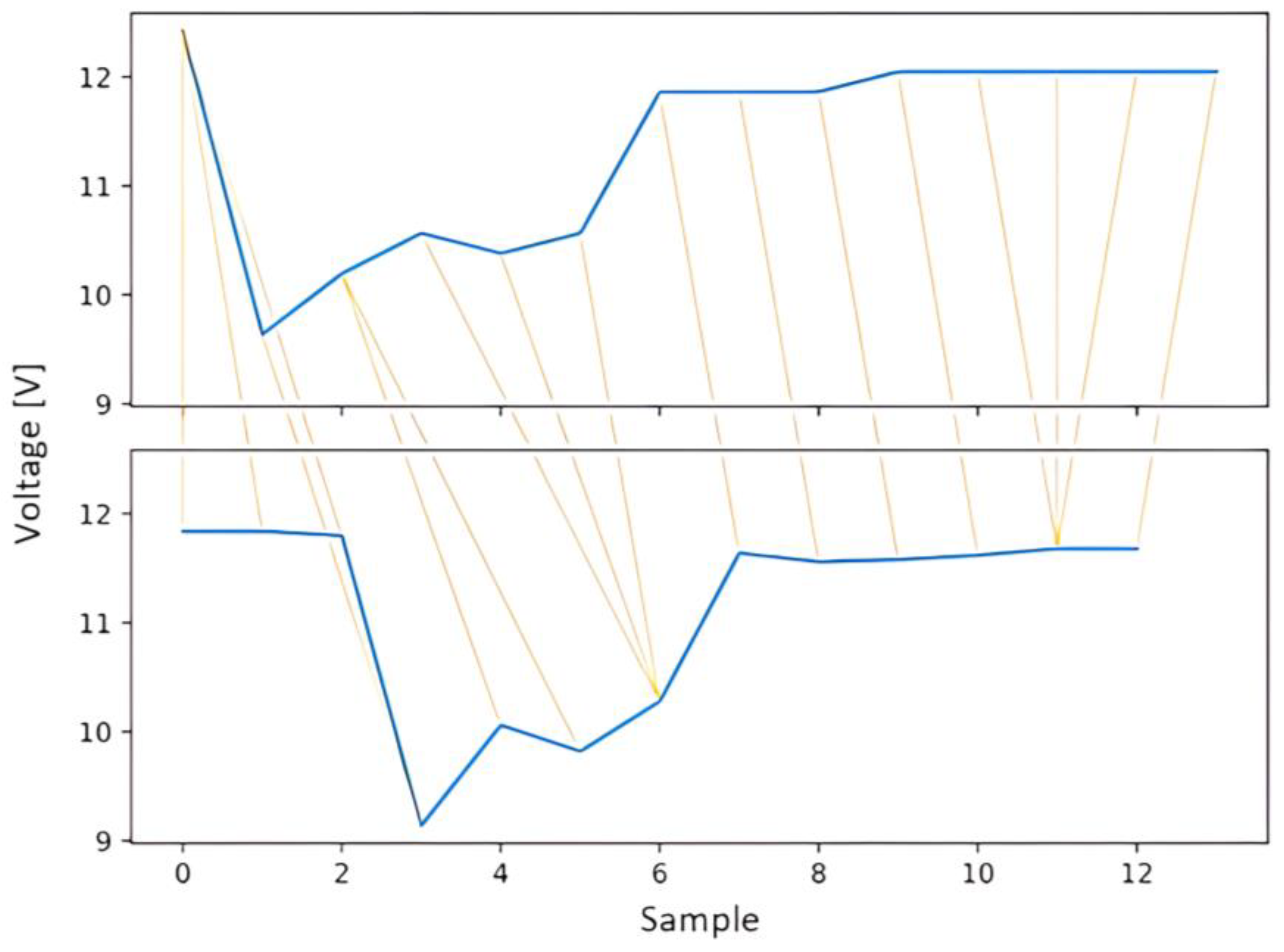
To simulate comparable sample rates for both detection methods, datasets recorded with the Picoscope were down-sampled. Therefore, the respective down-sampling factor based on the number of samples of each method was calculated.
For the example shown above, this down-sampling factor is 446. Applying this factor to the existing data of the Picoscope results in the following DTW graph (
Figure 9):
The calculated DTW value of 1.6 indicates a much higher agreement between the two signals. This supports the assumption of a stronger similarity between the two signals after down-sampling.
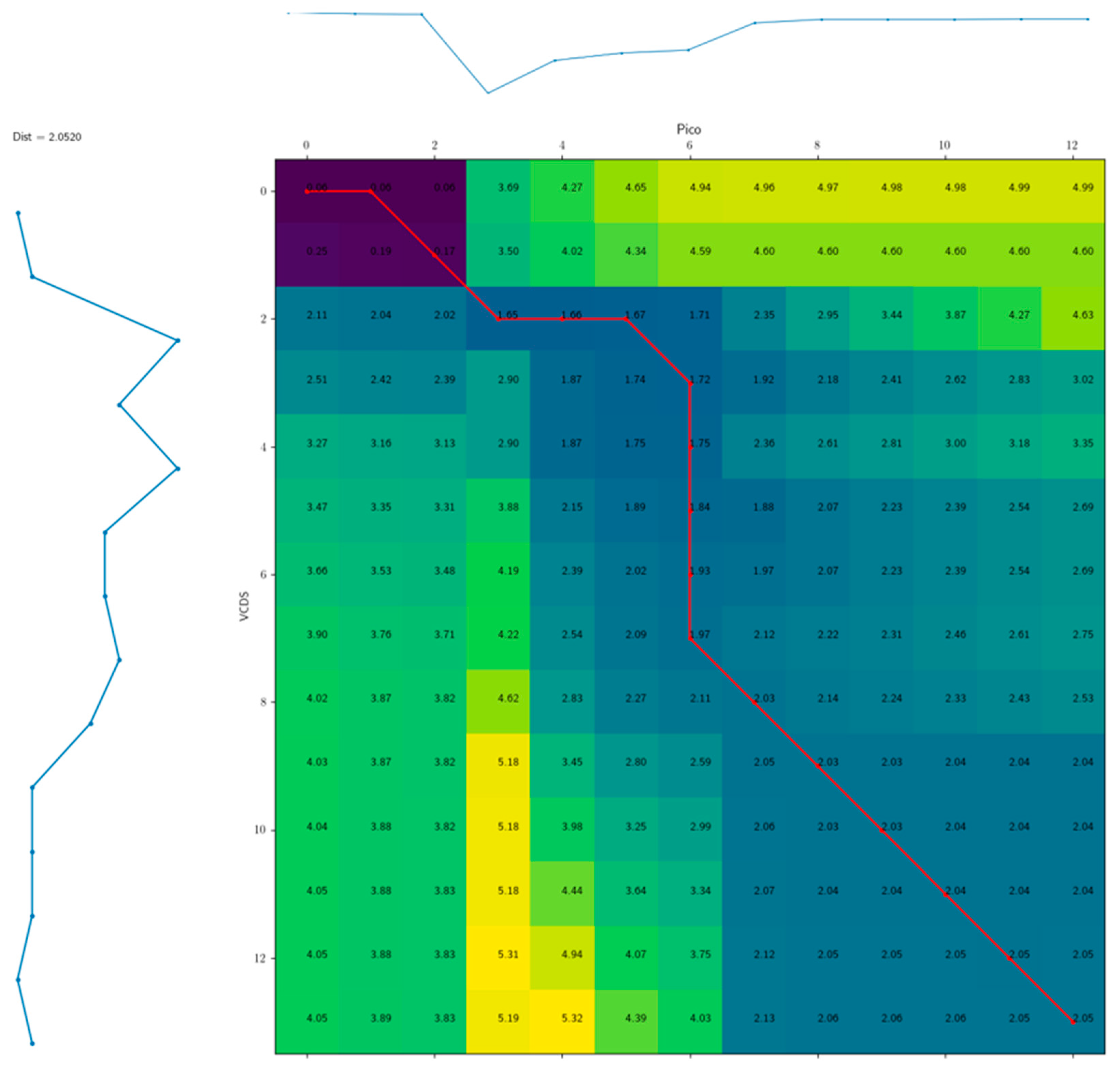
A heat map represents the cost of the possible time shifts from signal A to signal B.
Figure 10 shows the heat map of the cost function that was used to determine the best possible alignment of signals A and B. To achieve this alignment, the path through the heat map needs to be minimized.
3.5. Determination of the Battery Voltage with a Simulated Error
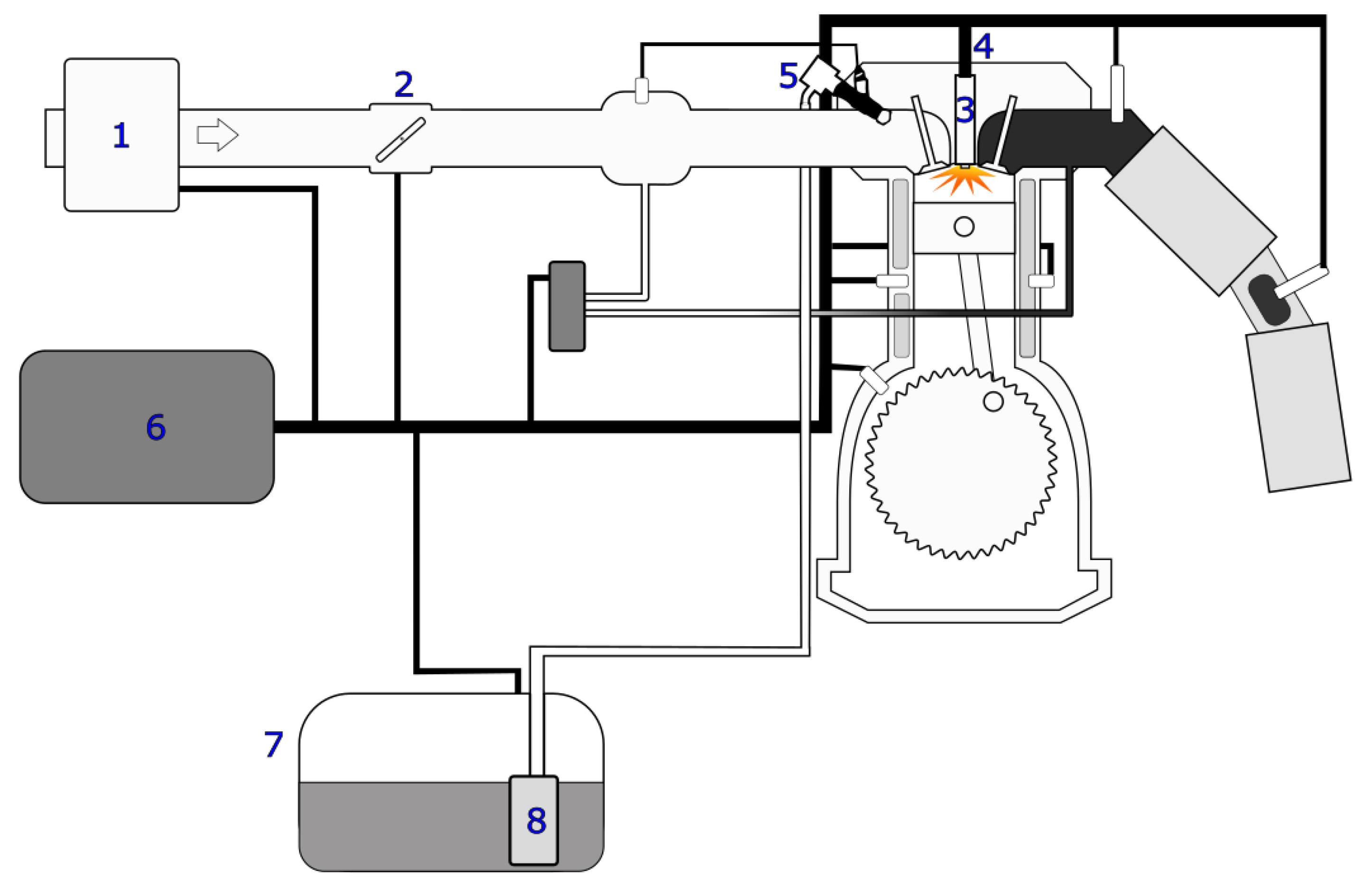
To provide further support for our previous findings, we intentionally caused an error on one of the cars. Therefore, we removed the ignition coil during engine start-up. The spark plug (4 in
Figure 11) was responsible for igniting the compressed air–gas mixture inside the engine, and the ignition voltage required for this depended primarily on the gas density in the combustion chamber. As the gas density increased, the required ignition voltage also increased almost linearly. The single-spark ignition coil transmitted the ignition voltage to the spark plug. By removing the ignition coil, we inhibited ignition in the cylinder.
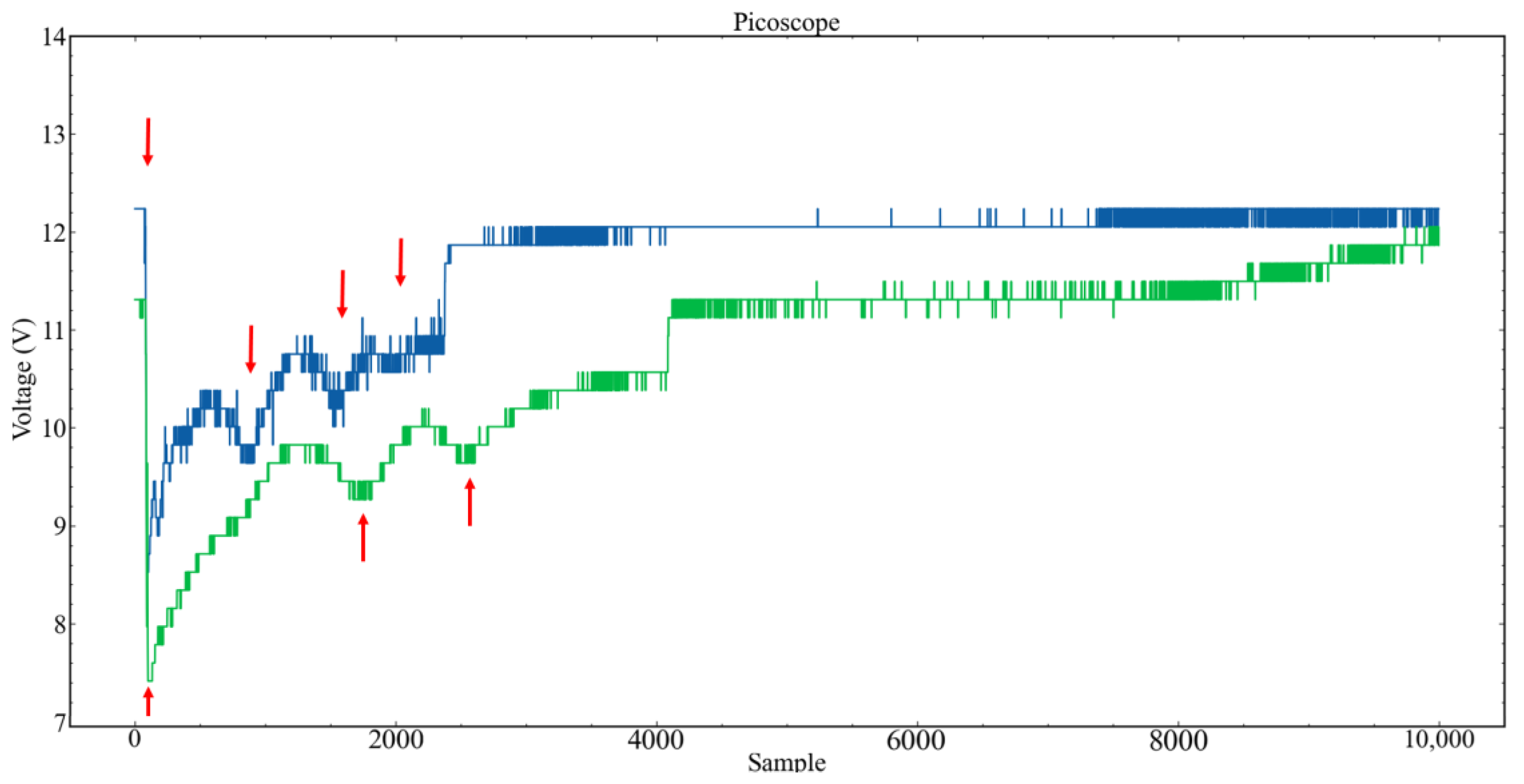
Figure 12 shows the results of the battery voltage during engine start-up with and without the ignition coil measured by the Picoscope.
The original plot shows the four voltage drops, which were described as significant in
Section 3.2. Manipulating the vehicle by removing the ignition coil resulted in a reduced number of voltage drops (3).
Table 6 shows the voltage values as well as the time interval between the detected dips. For each of the two measurement series, the time ranges between the aforementioned dips were calculated. For this purpose, the time point of the first dip was assumed to be zero. In the comparison of the voltage, it can be seen that the mean value of the voltages in the original state of the motor between the four dips is 9.8 volts. For the manipulated case, this is 8.8 volts, i.e., almost 1.1 volts lower on average. The average of the time intervals between the dips for the unmodified motor is 0.09 s. For the motor in the manipulated state, this value is 0.16 s. Accordingly, the time between two dips, i.e., between two compressions of the engine, is 1.7 times higher than in the original state.
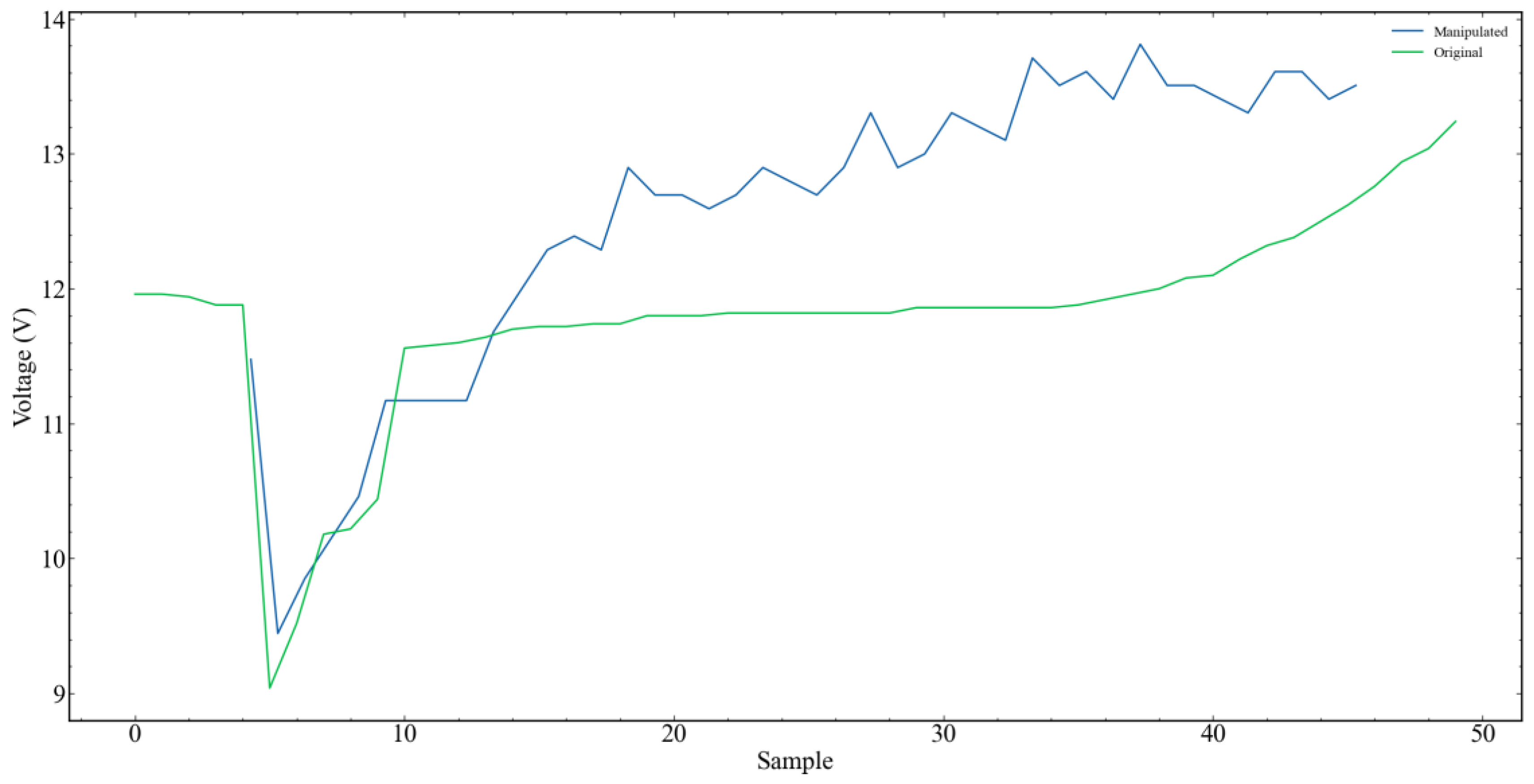
In contrast, the battery voltage measurement via the engine control unit only detects a reduced number of dips compared to the measurement via the Picoscope directly at the battery (
Figure 13).
The results in
Table 7 show that the voltage values in the manipulated condition were different compared to the original condition. In particular, the first dip in the manipulated condition was higher than the corresponding dip in the original condition. The difference between the two measurements was about 0.4 volts. The time interval between the dips was also different, with the second dip in the manipulated condition occurring later than in the original condition.
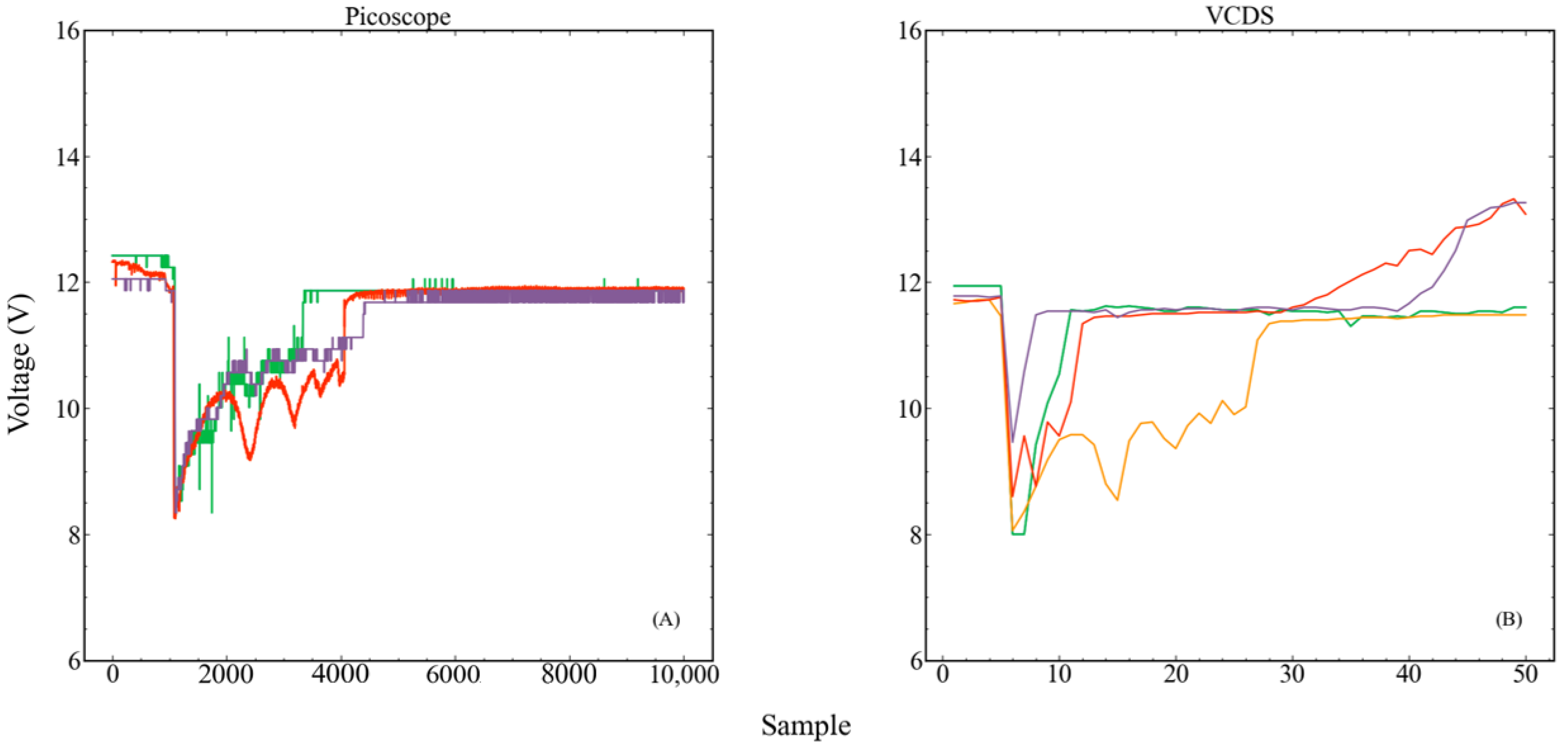
For the simulated error—the comparison between the battery voltage signal measured via the engine control unit (
Figure 14A) and the signal measured directly at the battery with a Picoscope (
Figure 14B)—significant deviations can be observed. These deviations include not only the differences in the voltage ratios, but also a clearly different resolution of the signals. In particular, significant voltage drops within the measurement via the engine control unit by means of VCDS are clearly less visible than in the measurement via the Picoscope directly at the battery. This suggests that due to the significantly lower sampling rate of the measurement via the engine control unit, the compression cannot be determined accurately. In particular, important points such as the dips within the first compression of the engine are not recorded. These results clearly show that the choice of the measuring instrument and the measuring method is of decisive importance, especially when measuring fast processes such as compression in an engine.
4. Discussion
A comparison of the two measuring devices, Picoscope 3204D MSO and VCDS HEX-V2, for the determination of battery voltage was carried out to identify advantages, drawbacks, significance, and limitations of the respective device for this application.
For a first step, both devices were compared on a general basis. The criteria of the comparison were the price, the sampling rate, parallel measurements, and the simplicity of the measurement. It was found that the acquisition cost of the Picoscope 3204D MSO was almost double that of the VCDS HEX-V2 which is, inter alia, due to the fact that the Picoscope 3204D MSO has a higher sampling rate of up to 1 GS/s, while the sampling rate of the VCDS HEX-V2 is limited by the CAN protocol. However, the VCDS HEX-V2 allows for unlimited parallel measurements, while the Picoscope 3204D MSO can take only two measurements at the same time. In addition, the operation of the VCDS HEX-V2 is considered easy and intuitive, while the operation of the Picoscope 3204D MSO is more demanding. This also correlates with the fifth criterion, background knowledge. As the Picoscope is technically more complex, the measurements are more accurate and versatile. However, knowledge and understanding of the technical relationships in a car are necessary to interpret the resulting data. The VCDS, on the other hand, while more accessible to non-professionals and requiring less technical understanding, is limited in its capabilities. Overall, the comparison shows that the Picoscope 3204D MSO is more suitable for complex measurements due to its higher sampling rate and its accuracy and versatility. Nevertheless, it also requires a higher technical understanding and background knowledge of the measured process.
In the next step, the start-up voltage analysis of the battery was carried out to gain information about the state of charge of the respective batteries which allows for an initial estimation of whether the energy supply of the battery is still sufficient to start the engine. Results showed that the start-up voltages measured via the VCDS were 0.2 V lower as those measured by the Picoscope. Thus, the corresponding states of charge based on the VCDS measurements were below the critical value that is necessary to start the engine. As it was no problem to start all cars tested in this study, we conclude that the determination of the start-up voltage using a Picoscope is more reliable and accurate and allows an earlier detection of possible failures based on the battery status.
Afterwards, we looked at the compression within the cranking process. As the Ohmic curve of the motor at start-up is reflected in the battery voltage curve, resolution of the battery voltage must be sufficient to identify possible anomalies. Results showed that the signal received from the oscilloscope has a high noise intensity but a better resolution, as all four voltage drops corresponding to the compression of the engine are clearly visible. In contrast, the signal received via the VCDS measurement is smooth, but besides the first large voltage drop, only two further voltage drops can be guessed until the final start of the engine. Thus, potential malfunctions of the four cylinders may not be detected when using a VCDS. Regarding the functionality of the alternator, the use of a VCDS seems to be sufficient, as the signals determined via the Picoscope do not deliver any additional information.
Finally, we looked at the resulting charging voltage of the battery through the alternator. Measurements via the Picoscope resulted in a 0.11 V lower battery voltage than the VCDS. Unfortunately, we do not know exact values of the expected battery voltages after charging. However, due to the results obtained before, we assume that the values resulting from measurements with the Picoscope are more reliable.
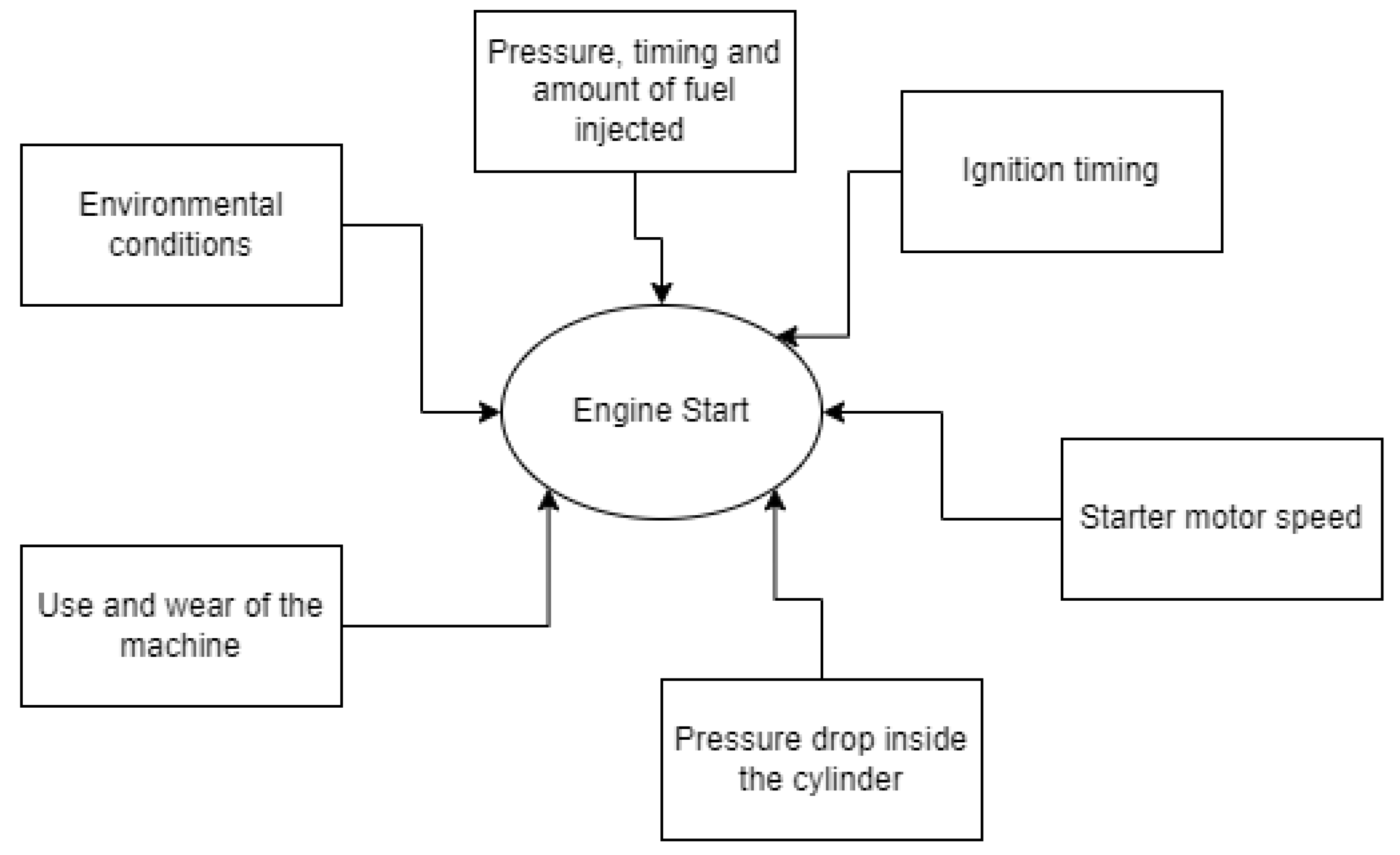
Results of our study indicate that the use of an oscilloscope is preferable to measure the battery voltage during start-up of the engine. Nevertheless, numerous influences on the cranking process, as shown in
Figure 15, were not analysed within the framework of this work using the selected measurement methods. This requires further investigation to finally decide for the best detection method.
Within this work, we exemplarily simulated an error during engine start-up by removing the ignition coil. Results showed significant deviations between the measurements taken via the engine control unit and those taken directly at the battery with a Picoscope. Once again, it became apparent that the direct measurement at the battery provided significantly more accurate information than the measurement via the engine control unit. For later work, however, it is advisable to provoke further fault cases and compare them with the original condition. An interesting question here could be whether faults such as a spark plug that does not seal completely can also be detected within the voltage curve.
Nevertheless, the choice of the measurement device depends on the respective application. Therefore, we also highlighted the pros and cons of the Picoscope and the VCDS in
Table 8.
Differences between the devices exist in terms of their ease of use, sampling rate, need for background knowledge, parallel measurements, price, and their ability to identify and later analyse the state of charge, charging voltages, and initial compression of the vehicle.
The Picoscope is more user-friendly than the VCDS in terms of software, but it requires more background knowledge to be fully utilised. The Picoscope has a higher sampling rate of up to 1 Gs/s, while the VCDS is limited by CAN. The Picoscope also allows parallel measurement of up to two sensors, while the VCDS allows unlimited parallel measurements.
In terms of price, the Picoscope is more expensive than the VCDS. However, the Picoscope is able to accurately identify the state of charge, the charging voltages, and the compression state of the vehicle, whereas the VCDS is inaccurate.
In the end, the choice of the measuring device depends on individual needs and available technical knowledge. The on-board diagnosis using a VCDS is less accurate due to the lower sample rate that is also reflected in the DTW analysis and the increased similarity after down-sampling. In addition, the VCDS is more error-prone compared to an oscilloscope. Several interfering factors can affect the measurement. In addition to instrument-specific errors, errors can also occur within the data transmission from the ECU to the VCDS measuring instrument itself. In summary, the applicability of diagnostics via the OBD II interface is limited by the restricted information provided by car manufacturers via on-board diagnostics. In contrast, an oscilloscope enables the measurement of the respective voltages by connecting to a variety of sensors. However, due to their compact engine designs, newer vehicle models provide fewer and fewer possibilities for direct measurements, which requires the use of special measurement sensors. The need for more affordable measuring devices is becoming more and more important. Since direct sensor measurements pose a considerable risk of damage to cables and connectors, the benefits of indirect methods such as measurements via an E-field sensor become apparent. In addition, future research should focus on the use of machine learning methods to more accurately evaluate oscilloscope measurements based on clearly detectable points. One possible classification method that can be used is the dynamic time warping method applied within this study. Based on these findings, an assistance system for the dynamic and intelligent support of employees in workshops can be developed in future work. To improve the accuracy and efficiency of diagnostic and repair processes, this system could be based on machine learning as well. It could also integrate different measurement methods, including direct and indirect measurements from sensors, to enable a more comprehensive diagnosis. In addition, the system could be tailored to the specific characteristics and needs of different vehicle models. By creating such an assistance system, the effectiveness and efficiency of workshops could be increased and customer satisfaction enhanced.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}