
A Fuzzy Logic Approach for Determining Driver Impatience and Stress Leveraging Internet of Vehicles Infrastructure

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Background and Related Work
2.1. Internet of Things
2.2. Wireless Sensor Networks
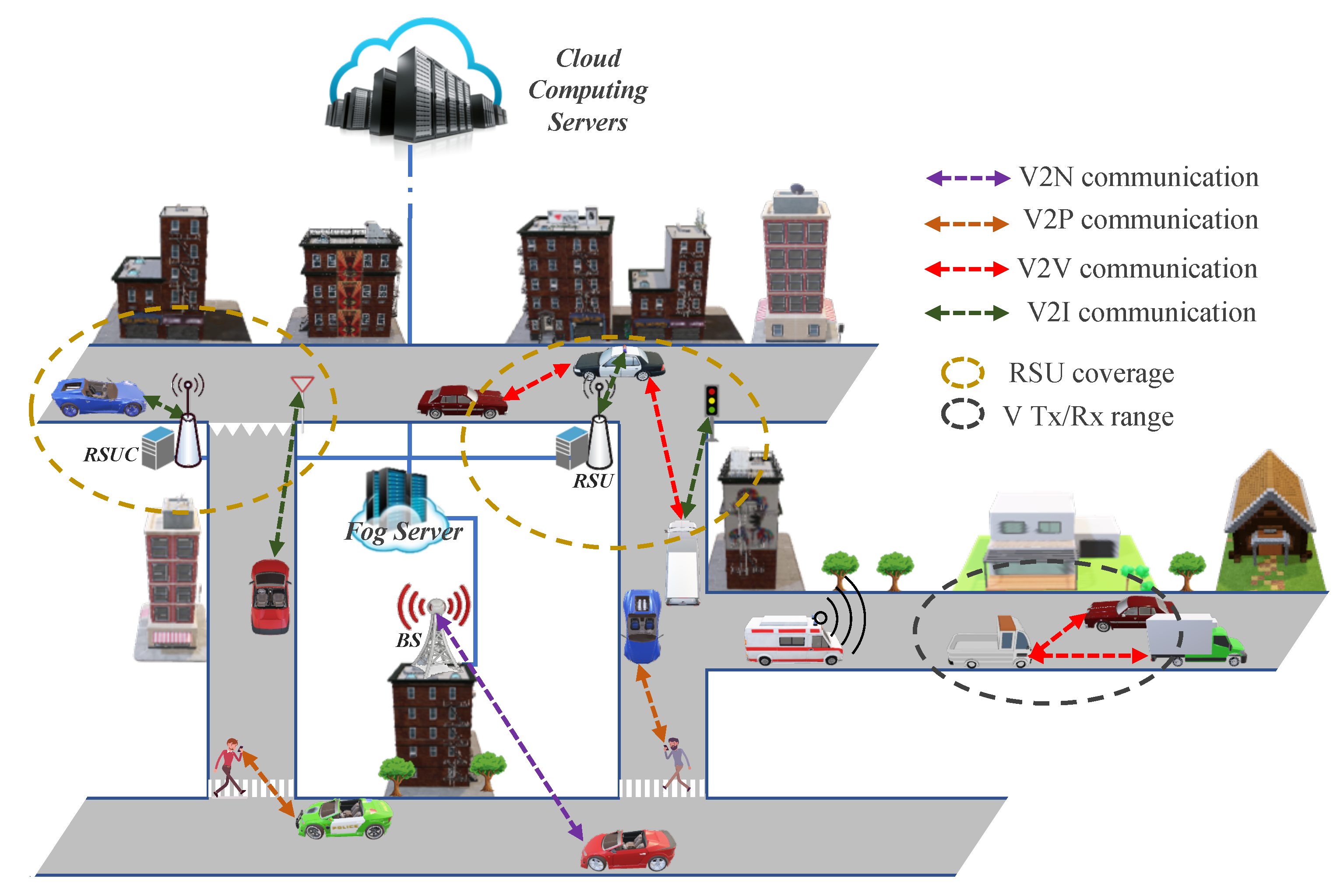
2.3. Internet of Vehicles
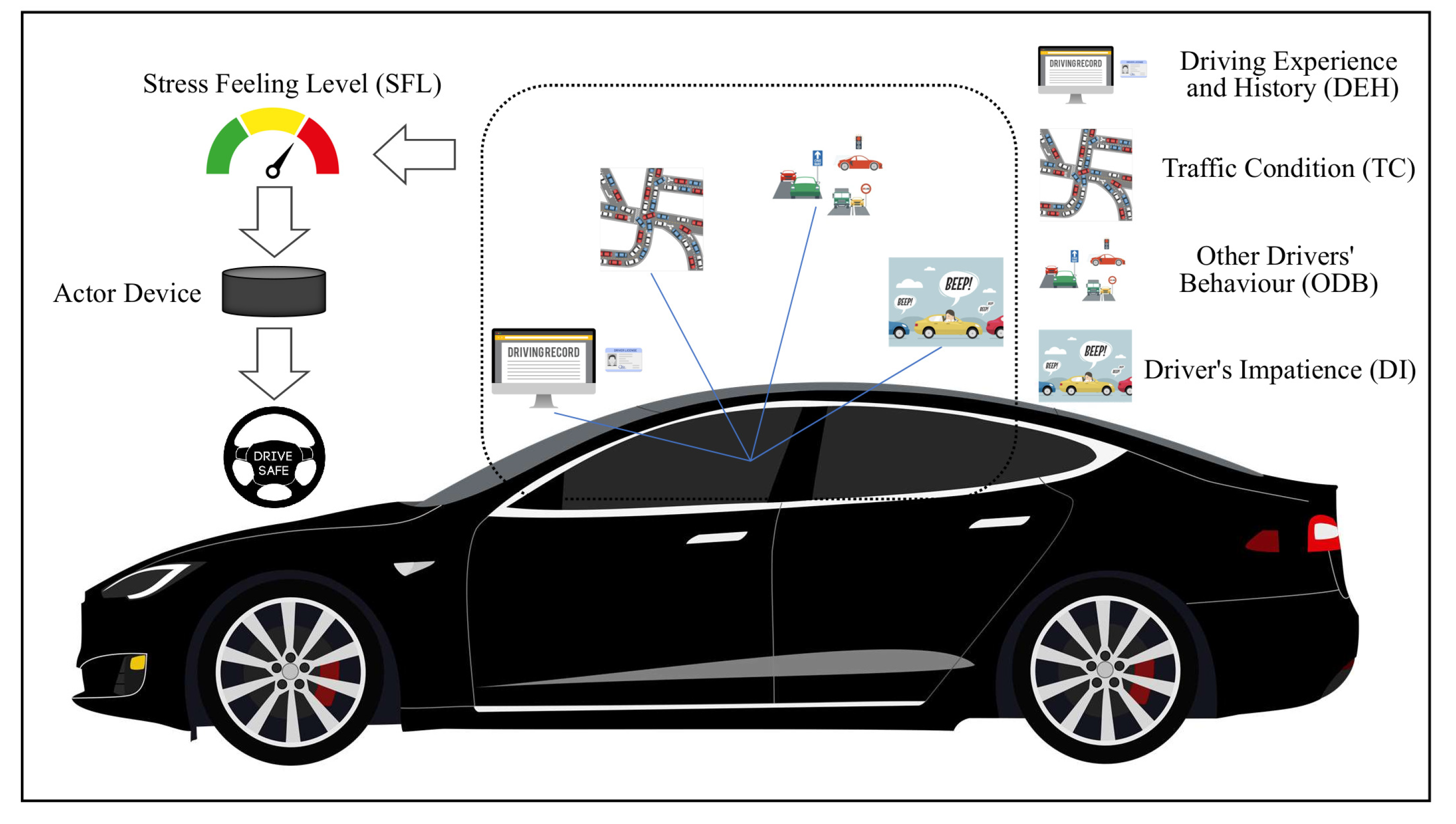
3. Integrated Fuzzy-Based System for Determining Driver Stress
3.1. Description of IFSDDS Parameters
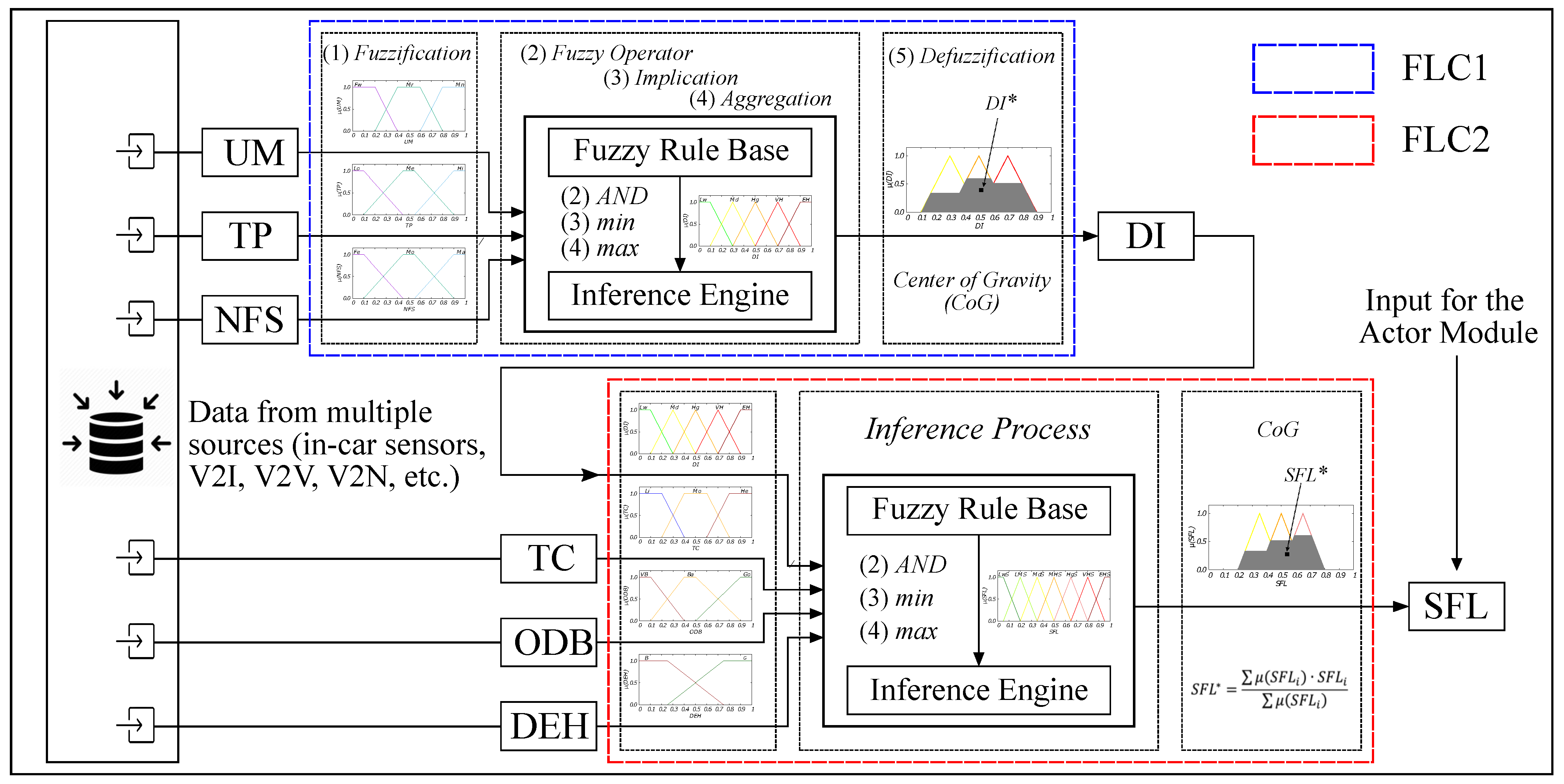
3.2. Implementation Details
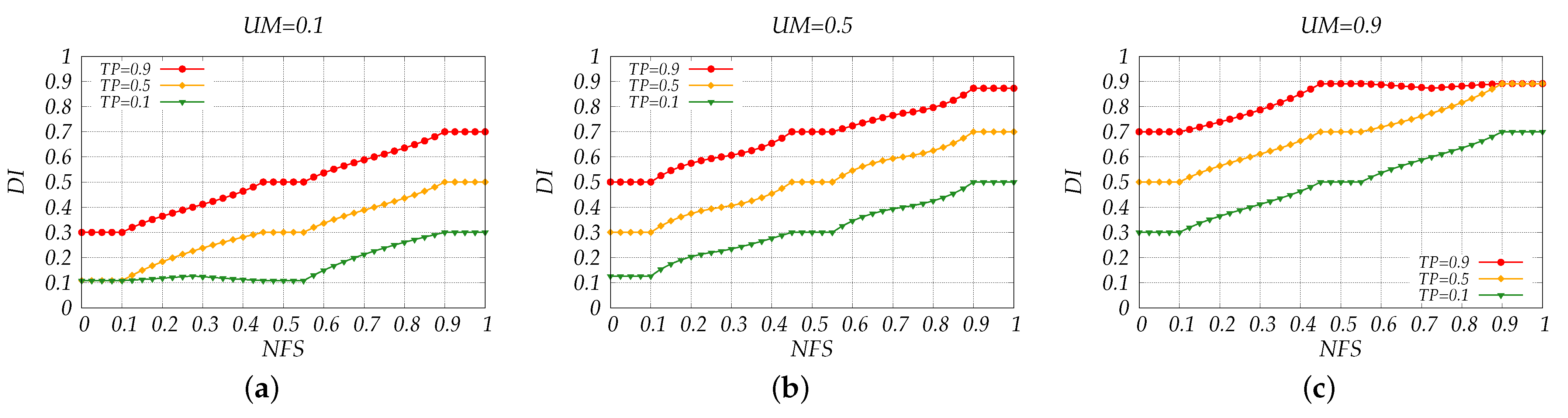
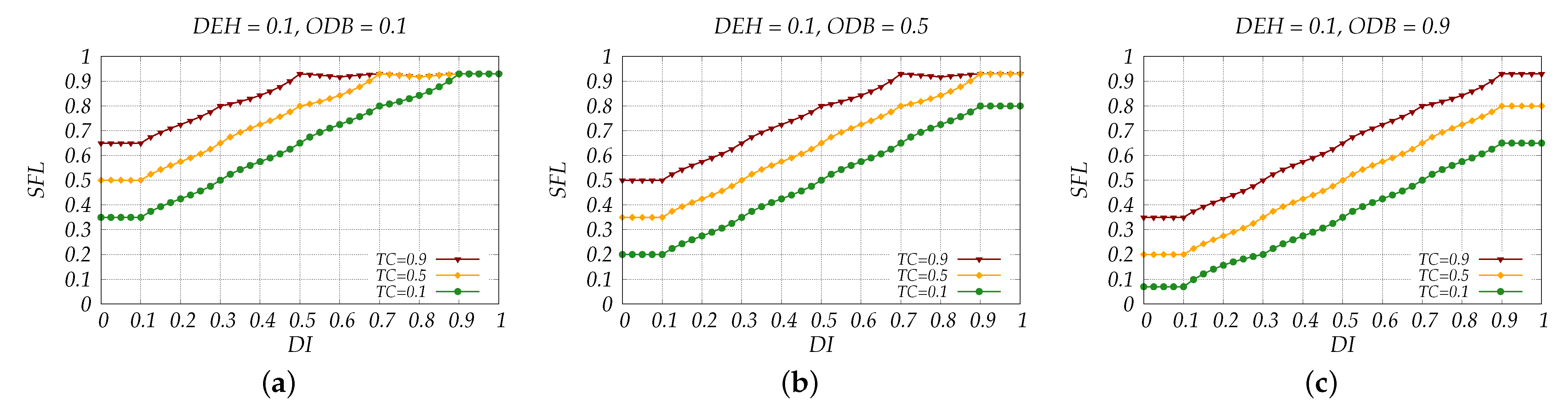
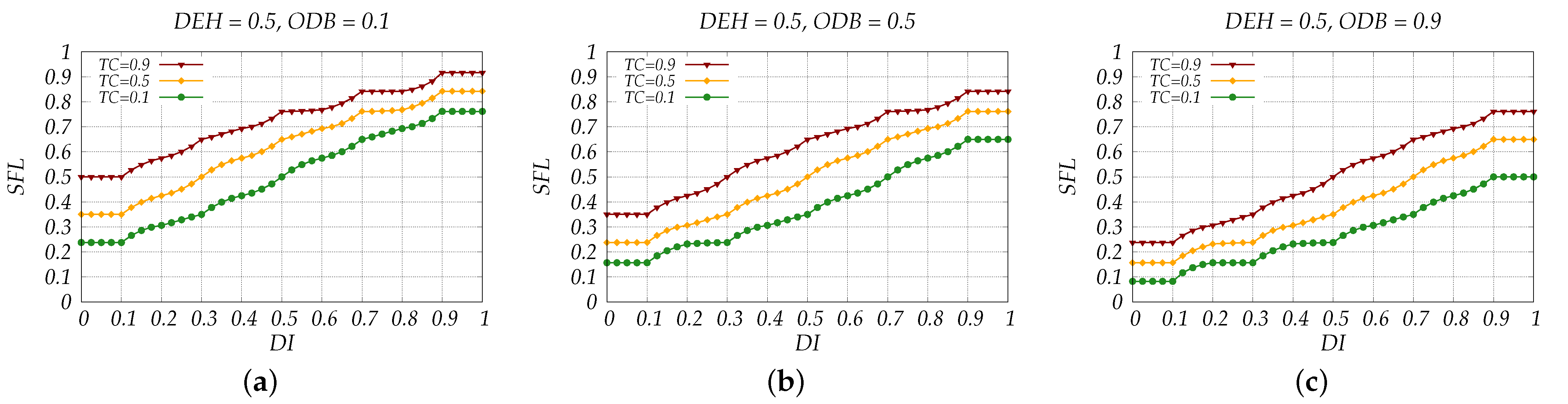
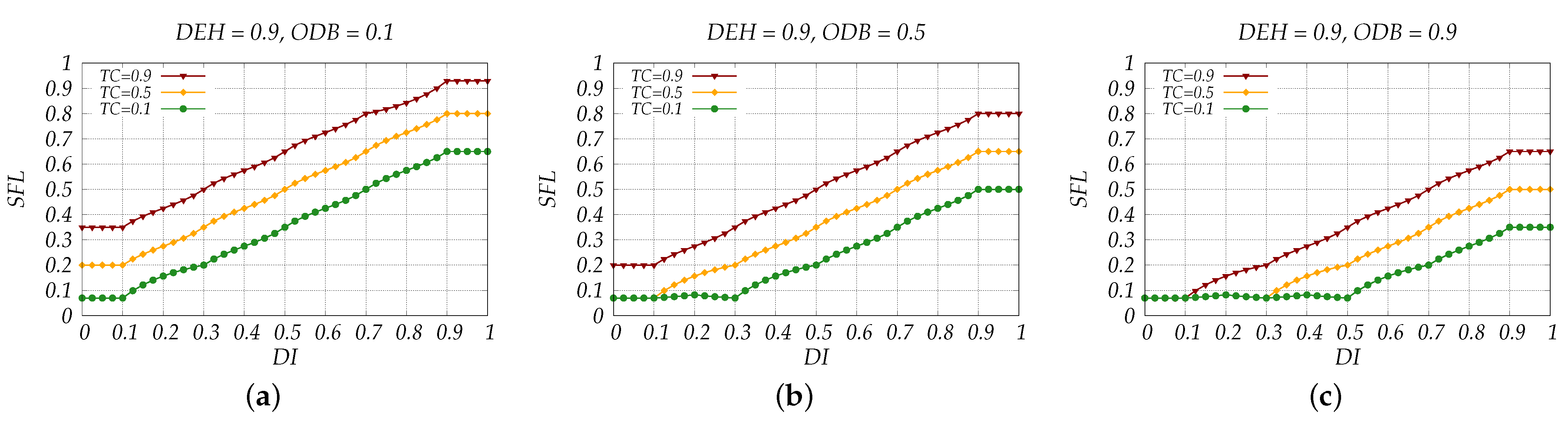
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| DEH | Driving Experience and History |
| DI | Driver Impatience |
| FL | Fuzzy Logic |
| FLC | Fuzzy Logic Controller |
| FRB | Fuzzy Rule Base |
| IFSDDS | Integrated Fuzzy-based System for Determining Driver Stress |
| IoT | Internet of Things |
| IoV | Internet of Vehicles |
| ITS | Intelligent Transportation Systems |
| NFS | Number of Forced Stops |
| ODB | Other Drivers’ Behavior |
| RSU | RoadSide Unit |
| RSUC | RoadSide Unit Controller |
| SFL | Stress Feeling Level |
| TC | Traffic Condition |
| TP | Time Pressure |
| UM | Unnecessary Maneuvers |
| V2I | Vehicle-to-Infrastructure |
| V2N | Vehicle-to-Network |
| V2P | Vehicle-to-Pedestrian |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| WSN | Wireless Sensor Network |
References
- World Health Organization. Global Status Report on Road Safety 2018: Summary; World Health Organization: Geneva, Switzerland, 2018; (WHO/NMH/NVI/18.20), Licence: CC BY-NC-SA 3.0 IGO). [Google Scholar]
- Dong, Y.; Hu, Z.; Uchimura, K.; Murayama, N. Driver Inattention Monitoring System for Intelligent Vehicles: A Review. IEEE Trans. Intell. Transp. Syst. 2011, 12, 596–614. [Google Scholar] [CrossRef]
- Seo, H.; Lee, K.D.; Yasukawa, S.; Peng, Y.; Sartori, P. LTE evolution for vehicle-to-everything services. IEEE Commun. Mag. 2016, 54, 22–28. [Google Scholar] [CrossRef]
- Karagiannis, G.; Altintas, O.; Ekici, E.; Heijenk, G.; Jarupan, B.; Lin, K.; Weil, T. Vehicular Networking: A Survey and Tutorial on Requirements, Architectures, Challenges, Standards and Solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616. [Google Scholar] [CrossRef]
- Lottermann, C.; Botsov, M.; Fertl, P.; Müllner, R.; Araniti, G.; Campolo, C.; Condoluci, M.; Iera, A.; Molinaro, A. LTE for Vehicular Communications. In Vehicular ad hoc Networks: Standards, Solutions, and Research; Springer International Publishing: Cham, Switzerland, 2015; pp. 457–501. [Google Scholar] [CrossRef]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey. In Traffic Safety Facts: Crash Stats; Report No. DOT HS 812 506; National Highway Traffic Safety Administration (NHTSA): Washington, DC, USA, 2018. [Google Scholar]
- Rolison, J.J.; Regev, S.; Moutari, S.; Feeney, A. What are the factors that contribute to road accidents? An assessment of law enforcement views, ordinary drivers’ opinions, and road accident records. Accid. Anal. Prev. 2018, 115, 11–24. [Google Scholar] [CrossRef] [PubMed]
- Colagrande, S. A methodology for the characterization of urban road safety through accident data analysis. Transp. Res. Procedia 2022, 60, 504–511. [Google Scholar] [CrossRef]
- Wu, G.F.; Liu, F.J.; Dong, G.L. Analysis of the Influencing Factors of Road Environment in Road Traffic Accidents. In Proceedings of the 2020 4th Annual International Conference on Data Science and Business Analytics (ICDSBA), Changsha, China, 5–6 September 2020; pp. 83–85. [Google Scholar] [CrossRef]
- Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. A Fuzzy-Based System for Safe Driving in VANETs Considering Impact of Driver Impatience on Stress Feeling Level. In Advances in Internet, Data & Web Technologies; Barolli, L., Kulla, E., Ikeda, M., Eds.; Springer International Publishing: Cham, Switzerlan, 2022; pp. 236–244. [Google Scholar] [CrossRef]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected Vehicles: Solutions and Challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Wang, Y.; Attebury, G.; Ramamurthy, B. A Survey of Security Issues in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2006, 8, 2–23. [Google Scholar] [CrossRef] [Green Version]
- Dargie, W.; Poellabauer, C. Motivation for a Network of Wireless Sensor Nodes. In Fundamentals of Wireless Sensor Networks: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 1–16. [Google Scholar] [CrossRef]
- Losilla, F.; Garcia-Sanchez, A.J.; Garcia-Sanchez, F.; Garcia-Haro, J.; Haas, Z.J. A comprehensive approach to WSN-based ITS applications: A survey. Sensors 2011, 11, 10220–10265. [Google Scholar] [CrossRef]
- Hartenstein, H.; Laberteaux, L. A Tutorial Survey on Vehicular Ad Hoc Networks. IEEE Commun. Mag. 2008, 46, 164–171. [Google Scholar] [CrossRef]
- Hartenstein, H.; Laberteaux, K. Introduction. In VANET Vehicular Applications and Inter-Networking Technologies; John Wiley & Sons: Hoboken, NJ, USA, 2010; pp. 1–19. [Google Scholar] [CrossRef]
- Jurgen, R. V2V/V2I Communications for Improved Road Safety and Efficiency; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
- Prayitno, A.; Nilkhamhang, I. V2V Network Topologies for Vehicle Platoons with Cooperative State Variable Feedback Control. In Proceedings of the 2021 Second International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 20–22 January 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Lee, M.; Atkison, T. VANET applications: Past, present, and future. Veh. Commun. 2021, 28, 100310. [Google Scholar] [CrossRef]
- Bylykbashi, K.; Qafzezi, E.; Ikeda, M.; Matsuo, K.; Barolli, L. Fuzzy-based Driver Monitoring System (FDMS): Implementation of two intelligent FDMSs and a testbed for safe driving in VANETs. Future Gener. Comput. Syst. 2020, 105, 665–674. [Google Scholar] [CrossRef]
- Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. Performance Evaluation of an Integrated Fuzzy-Based Driving-Support System for Real-Time Risk Management in VANETs. Sensors 2020, 20, 6537. [Google Scholar] [CrossRef] [PubMed]
- Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. A Fuzzy-Based System for Determining Driver Stress in VANETs Considering Driving Experience and History. In Advanced Information Networking and Applications; Barolli, L., Hussain, F., Enokido, T., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 1–9. [Google Scholar] [CrossRef]
- Hill, J.D.; Boyle, L.N. Driver stress as influenced by driving maneuvers and roadway conditions. Transp. Res. Part F Traffic Psychol. Behav. 2007, 10, 177–186. [Google Scholar] [CrossRef]
- Naveteur, J.; Cœugnet, S.; Charron, C.; Dorn, L.; Anceaux, F. Impatience and time pressure: Subjective reactions of drivers in situations forcing them to stop their car in the road. Transp. Res. Part F Traffic Psychol. Behav. 2013, 18, 58–71. [Google Scholar] [CrossRef]
- Vhaduri, S.; Ali, A.; Sharmin, M.; Hovsepian, K.; Kumar, S. Estimating Drivers’ Stress from GPS Traces. In Proceedings of the AutomotiveUI ’14: 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. A Fuzzy-Based System for Deciding Driver Impatience in VANETs. In Advances on P2P, Parallel, Grid, Cloud and Internet Computing; Barolli, L., Ed.; Springer International Publishing: Cham, Switzerland, 2022; pp. 129–137. [Google Scholar] [CrossRef]
- Kaiser, S.; Furian, G.; Schlembach, C. Aggressive Behaviour in Road Traffic—Findings from Austria. Transp. Res. Procedia 2016, 14, 4384–4392. [Google Scholar] [CrossRef] [Green Version]
- Bitkina, O.V.; Kim, J.; Park, J.; Park, J.; Kim, H.K. Identifying Traffic Context Using Driving Stress: A Longitudinal Preliminary Case Study. Sensors 2019, 19, 2152. [Google Scholar] [CrossRef] [Green Version]
- Hennessy, D.A.; Wiesenthal, D.L. The relationship between traffic congestion, driver stress and direct versus indirect coping behaviours. Ergonomics 1997, 40, 348–361. [Google Scholar] [CrossRef]
- Antoun, M.; Ding, D.; Bohn-Goldbaum, E.E.; Michael, S.; Edwards, K.M. Driving in an urban environment, the stress response and effects of exercise. Ergonomics 2018, 61, 1273–1281. [Google Scholar] [CrossRef]
- Singh, R.R.; Conjeti, S.; Banerjee, R. Assessment of Driver Stress from Physiological Signals collected under Real-Time Semi-Urban Driving Scenarios. Int. J. Comput. Intell. Syst. 2014, 7, 909–923. [Google Scholar] [CrossRef] [Green Version]
- Clapp, J.D.; Olsen, S.A.; Danoff-Burg, S.; Hagewood, J.H.; Hickling, E.J.; Hwang, V.S.; Beck, J.G. Factors contributing to anxious driving behavior: The role of stress history and accident severity. J. Anxiety Disord. 2011, 25, 592–598. [Google Scholar] [CrossRef] [Green Version]
- Chung, E.K.; Park, S.Y.; Sohn, Y.W. Effects of Occupational Drivers’ Traffic Accident History on Risk Perception, Work Attitudes, and Unstable Driving. Transp. Res. Rec. 2021, 2675, 734–744. [Google Scholar] [CrossRef]
- Simon, F.; Corbett, C. Road traffic offending, stress, age, and accident history among male and female drivers. Ergonomics 1996, 39, 757–780. [Google Scholar] [CrossRef] [PubMed]
- Magaña, V.C.; Scherz, W.D.; Seepold, R.; Madrid, N.M.; Pañeda, X.G.; Garcia, R. The Effects of the Driver’s Mental State and Passenger Compartment Conditions on Driving Performance and Driving Stress. Sensors 2020, 20, 5274. [Google Scholar] [CrossRef] [PubMed]
- Ścigała, D.K.; Zdankiewicz-Ścigała, E. The Role in Road Traffic Accident and Anxiety as Moderators Attention Biases in Modified Emotional Stroop Test. Front. Psychol. 2019, 10, 1575. [Google Scholar] [CrossRef]
- Mayou, R.; Bryant, B. Consequences of road traffic accidents for different types of road user. Injury 2003, 34, 197–202. [Google Scholar] [CrossRef]
- Zhao, Y.; Yamamoto, T.; Kanamori, R. Study of older male drivers’ driving stress compared with that of young male drivers. J. Traffic Transp. Eng. (Engl. Ed.) 2020, 7, 467–481. [Google Scholar] [CrossRef]
- Kandel, A. Fuzzy Expert Systems; CRC Press: Boca Raton, FL, USA, 1991. [Google Scholar]
- Klir, G.J.; Folger, T.A. Fuzzy Sets, Uncertainty, and Information; Prentice Hall, Inc.: Upper Saddle River, NJ, USA, 1987. [Google Scholar]
- Munakata, T.; Jani, Y. Fuzzy Systems: An Overview. Commun. ACM 1994, 37, 69–77. [Google Scholar] [CrossRef]
- Zimmermann, H.J. Fuzzy Set Theory and Its Applications; Springer Science & Business Media: New York, NY, USA, 1996. [Google Scholar] [CrossRef]
- Zadeh, L.A.; Kacprzyk, J. Fuzzy Logic for the Management of Uncertainty; John Wiley & Sons, Inc.: New York, NY, USA, 1992. [Google Scholar]
- McNeill, F.M.; Thro, E. Fuzzy Logic: A Practical Approach; Academic Press: Cambridge, MA, USA, 1994. [Google Scholar]
- MathWorks. Fuzzy Logic Toolbox; MathWorks: Natick, MA, USA, 2019. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | UM | TP | NFS | DI | No. | UM | TP | NFS | DI | No. | UM | TP | NFS | DI |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Fw | Lo | Fe | Lw | 10 | Mr | Lo | Fe | Lw | 19 | Mn | Lo | Fe | Md |
| 2 | Fw | Lo | Mo | Lw | 11 | Mr | Lo | Mo | Md | 20 | Mn | Lo | Mo | Hg |
| 3 | Fw | Lo | Ma | Md | 12 | Mr | Lo | Ma | Hg | 21 | Mn | Lo | Ma | VH |
| 4 | Fw | Me | Fe | Lw | 13 | Mr | Me | Fe | Md | 22 | Mn | Me | Fe | Hg |
| 5 | Fw | Me | Mo | Md | 14 | Mr | Me | Mo | Hg | 23 | Mn | Me | Mo | VH |
| 6 | Fw | Me | Ma | Hg | 15 | Mr | Me | Ma | VH | 24 | Mn | Me | Ma | EH |
| 7 | Fw | Hi | Fe | Md | 16 | Mr | Hi | Fe | Hg | 25 | Mn | Hi | Fe | VH |
| 8 | Fw | Hi | Mo | Hg | 17 | Mr | Hi | Mo | VH | 26 | Mn | Hi | Mo | EH |
| 9 | Fw | Hi | Ma | VH | 18 | Mr | Hi | Ma | EH | 27 | Mn | Hi | Ma | EH |
| No. | DEH | ODB | TC | DI | SFL | No. | DEH | ODB | TC | DI | SFL | No. | DEH | ODB | TC | DI | SFL |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | B | VB | L | Lw | MdS | 31 | B | Go | L | Lw | LwS | 61 | G | Ba | L | Lw | LwS |
| 2 | B | VB | L | Md | MHS | 32 | B | Go | L | Md | LMS | 62 | G | Ba | L | Md | LwS |
| 3 | B | VB | L | Hg | HgS | 33 | B | Go | L | Hg | MdS | 63 | G | Ba | L | Hg | LMS |
| 4 | B | VB | L | VH | VHS | 34 | B | Go | L | VH | MHS | 64 | G | Ba | L | VH | MdS |
| 5 | B | VB | L | EH | EHS | 35 | B | Go | L | EH | HgS | 65 | G | Ba | L | EH | MHS |
| 6 | B | VB | M | Lw | MHS | 36 | B | Go | M | Lw | LMS | 66 | G | Ba | M | Lw | LwS |
| 7 | B | VB | M | Md | HgS | 37 | B | Go | M | Md | MdS | 67 | G | Ba | M | Md | LMS |
| 8 | B | VB | M | Hg | VHS | 38 | B | Go | M | Hg | MHS | 68 | G | Ba | M | Hg | MdS |
| 9 | B | VB | M | VH | EHS | 39 | B | Go | M | VH | HgS | 69 | G | Ba | M | VH | MHS |
| 10 | B | VB | M | EH | EHS | 40 | B | Go | M | EH | VHS | 70 | G | Ba | M | EH | HgS |
| 11 | B | VB | H | Lw | HgS | 41 | B | Go | H | Lw | MdS | 71 | G | Ba | H | Lw | LMS |
| 12 | B | VB | H | Md | VHS | 42 | B | Go | H | Md | MHS | 72 | G | Ba | H | Md | MdS |
| 13 | B | VB | H | Hg | EHS | 43 | B | Go | H | Hg | HgS | 73 | G | Ba | H | Hg | MHS |
| 14 | B | VB | H | VH | EHS | 44 | B | Go | H | VH | VHS | 74 | G | Ba | H | VH | HgS |
| 15 | B | VB | H | EH | EHS | 45 | B | Go | H | EH | EHS | 75 | G | Ba | H | EH | VHS |
| 16 | B | Ba | L | Lw | LMS | 46 | G | VB | L | Lw | LwS | 76 | G | Go | L | Lw | LwS |
| 17 | B | Ba | L | Md | MdS | 47 | G | VB | L | Md | LMS | 77 | G | Go | L | Md | LwS |
| 18 | B | Ba | L | Hg | MHS | 48 | G | VB | L | Hg | MdS | 78 | G | Go | L | Hg | LwS |
| 19 | B | Ba | L | VH | HgS | 49 | G | VB | L | VH | MHS | 79 | G | Go | L | VH | LMS |
| 20 | B | Ba | L | EH | VHS | 50 | G | VB | L | EH | HgS | 80 | G | Go | L | EH | MdS |
| 21 | B | Ba | M | Lw | MdS | 51 | G | VB | M | Lw | LMS | 81 | G | Go | M | Lw | LwS |
| 22 | B | Ba | M | Md | MHS | 52 | G | VB | M | Md | MdS | 82 | G | Go | M | Md | LwS |
| 23 | B | Ba | M | Hg | HgS | 53 | G | VB | M | Hg | MHS | 83 | G | Go | M | Hg | LMS |
| 24 | B | Ba | M | VH | VHS | 54 | G | VB | M | VH | HgS | 84 | G | Go | M | VH | MdS |
| 25 | B | Ba | M | EH | EHS | 55 | G | VB | M | EH | VHS | 85 | G | Go | M | EH | MHS |
| 26 | B | Ba | H | Lw | MHS | 56 | G | VB | H | Lw | MdS | 86 | G | Go | H | Lw | LwS |
| 27 | B | Ba | H | Md | HgS | 57 | G | VB | H | Md | MHS | 87 | G | Go | H | Md | LMS |
| 28 | B | Ba | H | Hg | VHS | 58 | G | VB | H | Hg | HgS | 88 | G | Go | H | Hg | MdS |
| 29 | B | Ba | H | VH | EHS | 59 | G | VB | H | VH | VHS | 89 | G | Go | H | VH | MHS |
| 30 | B | Ba | H | EH | EHS | 60 | G | VB | H | EH | EHS | 90 | G | Go | H | EH | HgS |
| Simulator | FuzzyC |
| Hardware | ASRock Z77 Extreme6 |
| OS | Ubuntu 20.04.4 LTS |
| CPU | Intel® Core™ i7-3770 CPU @ 3.40 GHz × 8 |
| Memory | 16 GB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. A Fuzzy Logic Approach for Determining Driver Impatience and Stress Leveraging Internet of Vehicles Infrastructure. Vehicles 2022, 4, 553-566. https://doi.org/10.3390/vehicles4020032
Bylykbashi K, Qafzezi E, Ampririt P, Ikeda M, Matsuo K, Barolli L. A Fuzzy Logic Approach for Determining Driver Impatience and Stress Leveraging Internet of Vehicles Infrastructure. Vehicles. 2022; 4(2):553-566. https://doi.org/10.3390/vehicles4020032
Chicago/Turabian StyleBylykbashi, Kevin, Ermioni Qafzezi, Phudit Ampririt, Makoto Ikeda, Keita Matsuo, and Leonard Barolli. 2022. "A Fuzzy Logic Approach for Determining Driver Impatience and Stress Leveraging Internet of Vehicles Infrastructure" Vehicles 4, no. 2: 553-566. https://doi.org/10.3390/vehicles4020032