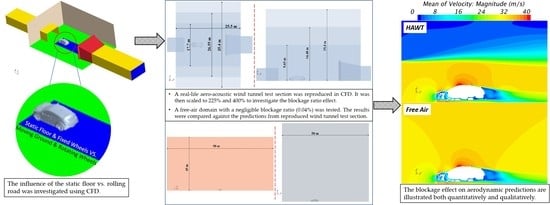
Computational Analyses of the Effects of Wind Tunnel Ground Simulation and Blockage Ratio on the Aerodynamic Prediction of Flow over a Passenger Vehicle


Abstract
:
1. Introduction
2. Wind Tunnels and Boundary Conditions
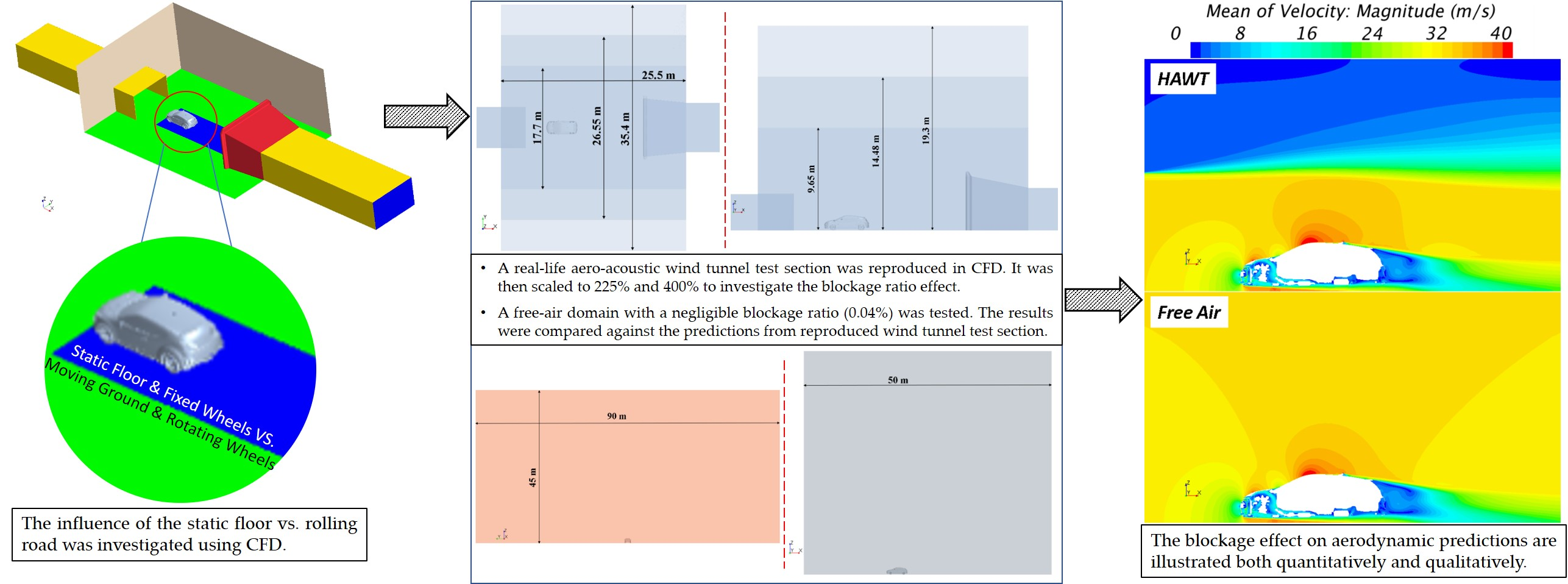
2.1. Hyundai Aero-Acoustic Wind Tunnel (HAWT) Model
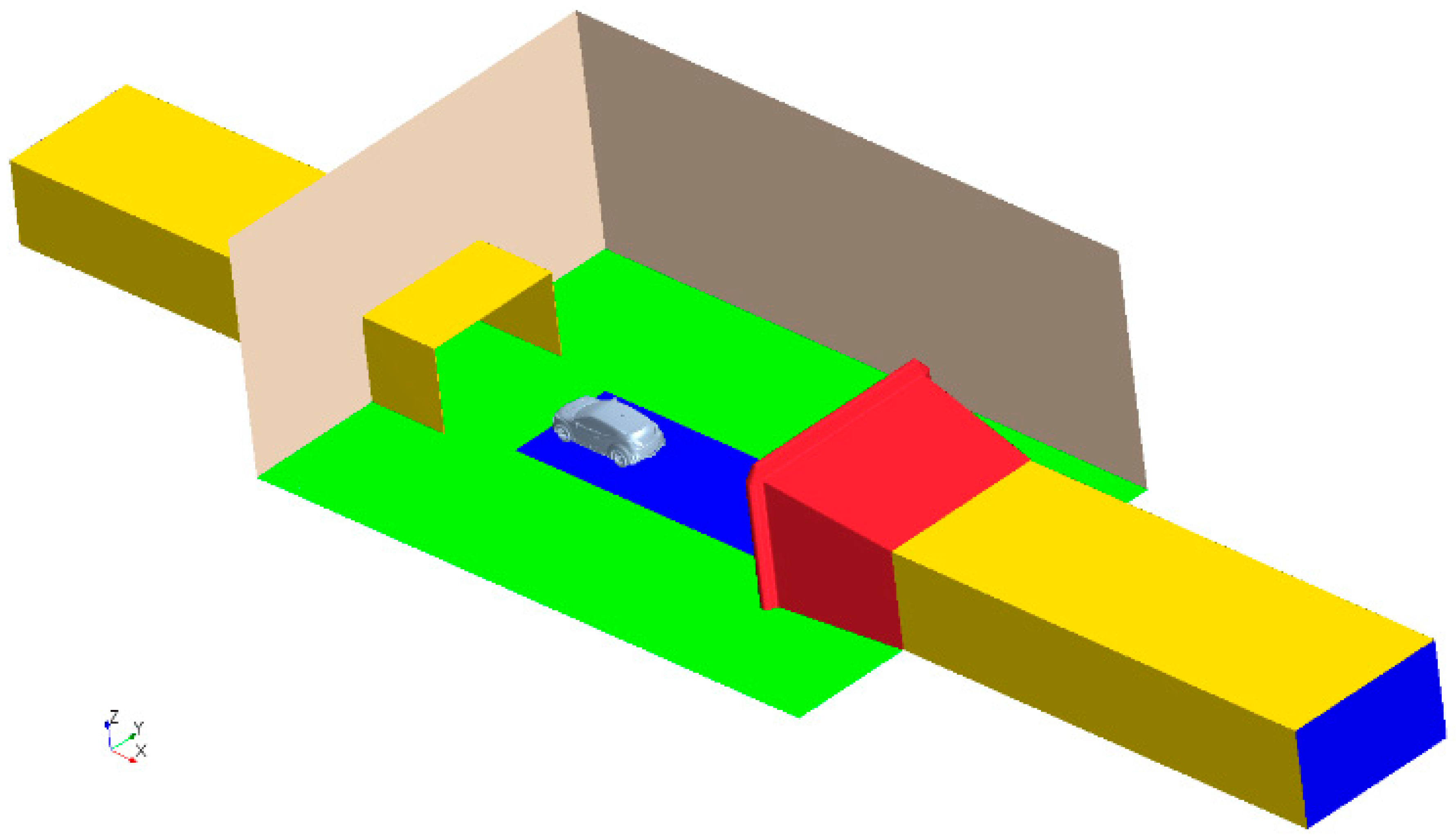
2.2. Blockage-Free Domain
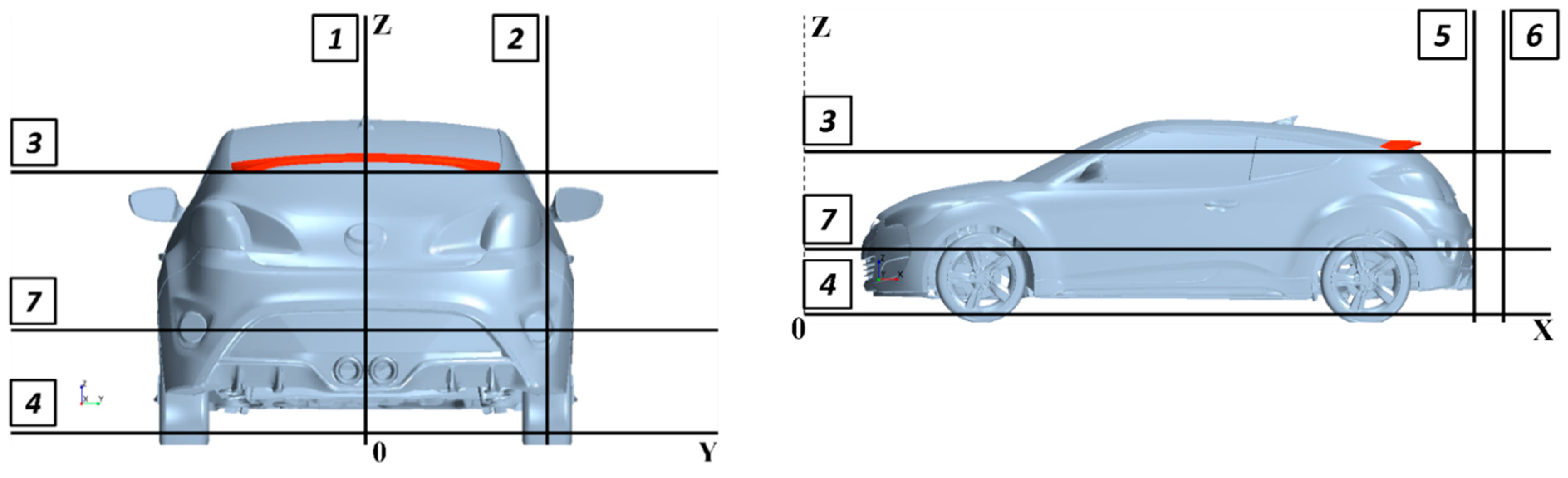
2.3. Spoiler Geometries
3. Numerical Setup
3.1. HAWT Model
3.2. Blockage-Free Model
3.3. Spoiler Mesh
3.4. Initial and Boundary Conditions
3.5. Turbulence Model
3.6. Solver and Convergence
4. Results and Discussion
- XZ-plane along the vehicle center line at Y = 0;
- XZ-plane through the right-tire center at Y = 0.78 m;
- XY-plane thru the spoiler at Z = 1.17 m;
- XY-plane near the ground at Z = 0.05 m;
- YZ-plane at the rear fascia at X = 3.4 m, wake cross-Section 1;
- YZ-plane at X = 3.6 m, wake cross-Section 2;
- XY-plane observing jet expansion at Z = 0.47 m.
4.1. Wind Tunnel Boundary Interference Effects
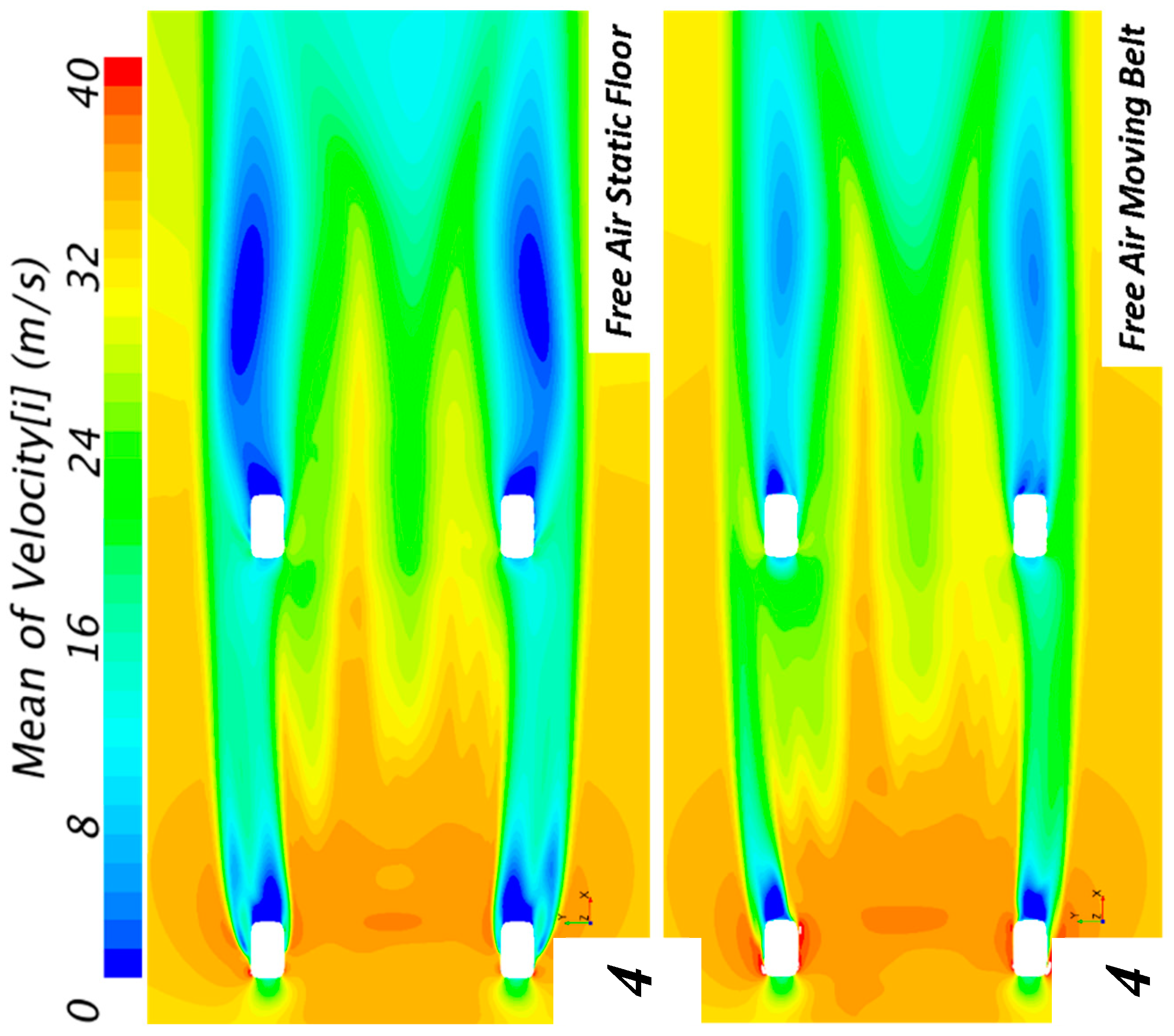
4.2. Static and Moving Ground Effects
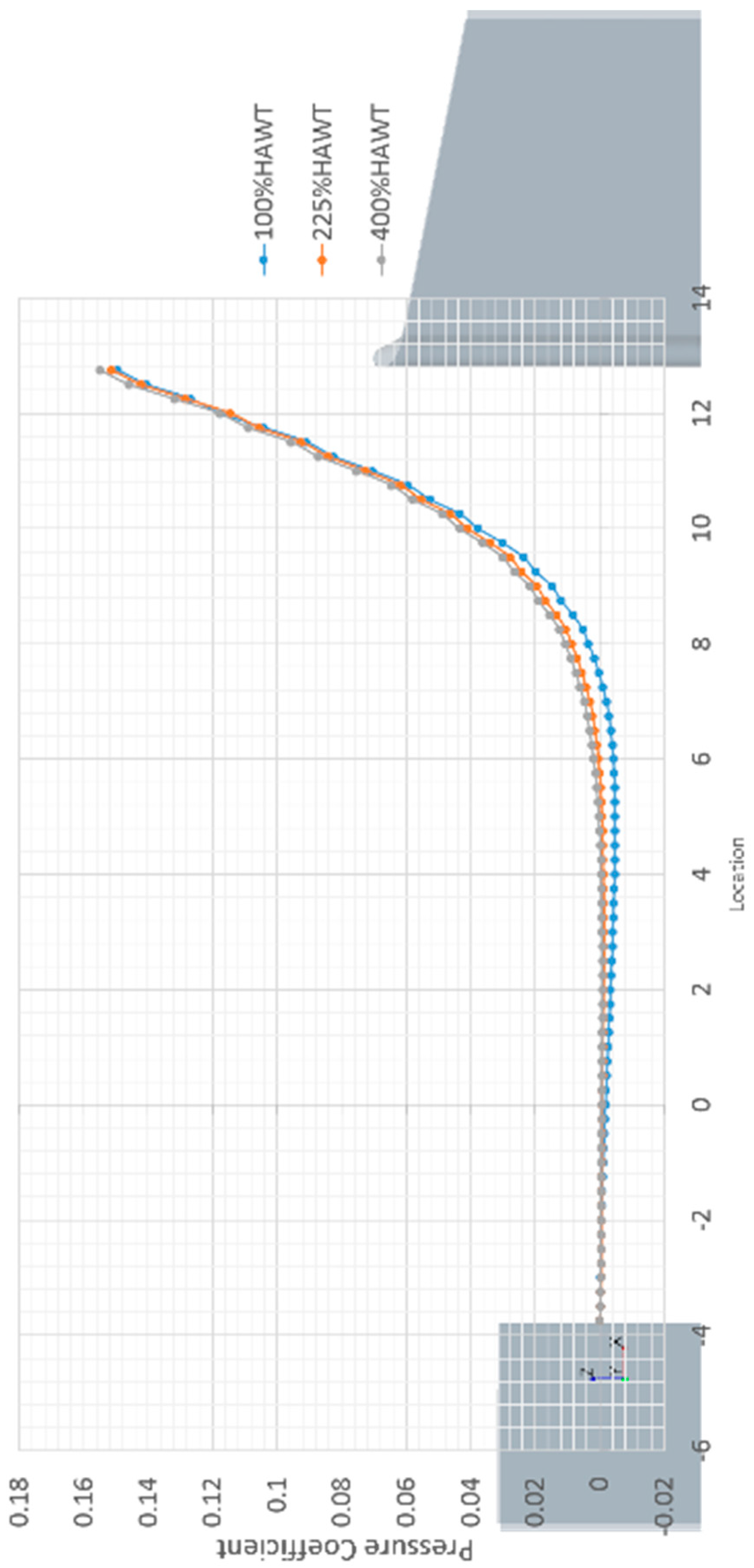
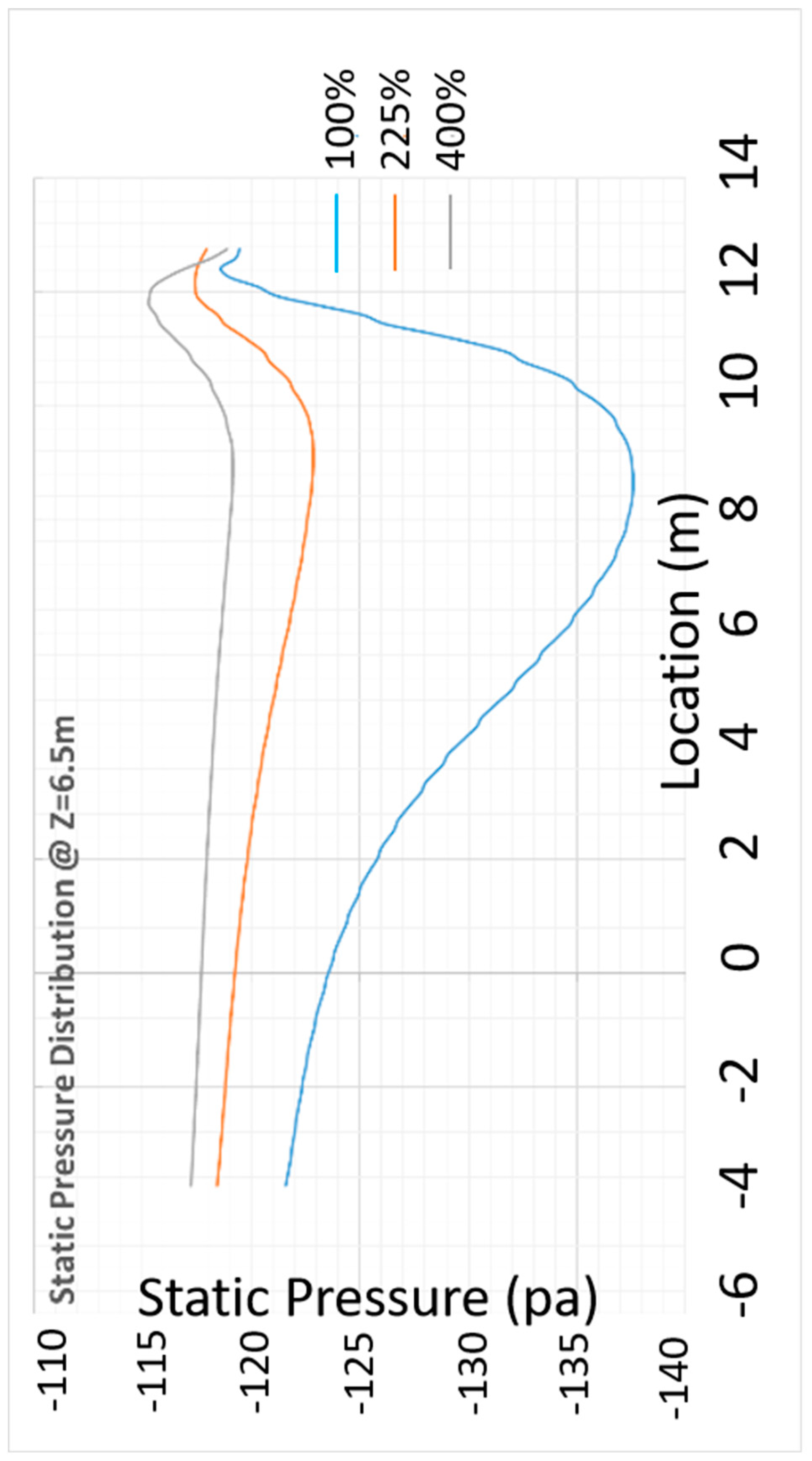
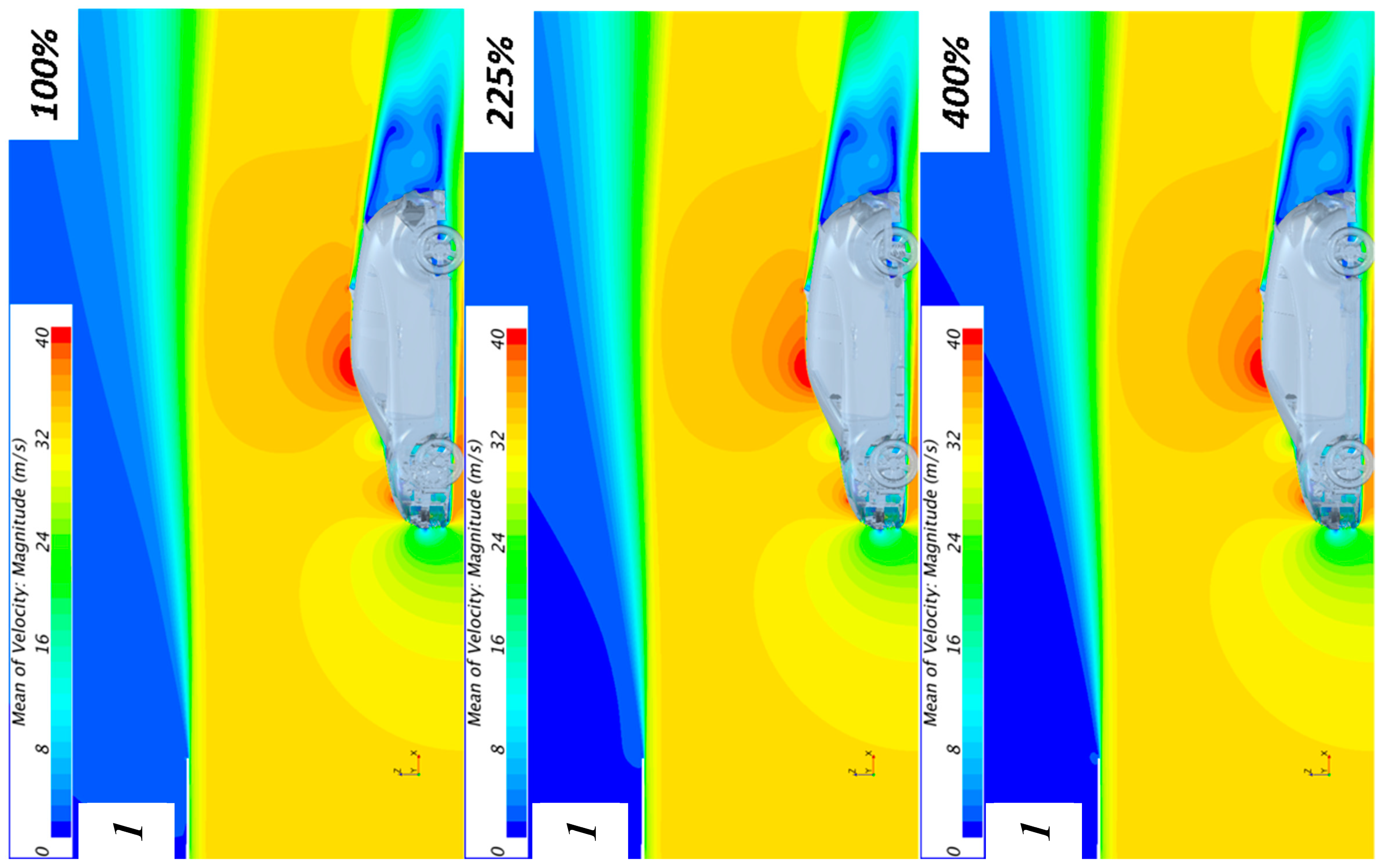
4.3. Blockage Effects of the Semi Open Jet Test Section
4.4. HAWT and Free-Air Tunnel Comparison
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kremheller, A. The Aerodynamics Development of the New Nissan Qashqai; 2014-01-0572; Society of Automotive Engineers: Detroit, MI, USA, 2014. [Google Scholar] [CrossRef]
- Katz, J. Race Car Aerodynamics: Designing for Speed; R. Bentley: Cambridge, MA, USA, 2006. [Google Scholar]
- Glauert, H. Wind Tunnel Interference on Wings, Bodies and Airscrews; DTIC Document, No. ARC-R/M-1566; Aeronautical Research Council: London, UK, 1933. [Google Scholar]
- Cooper, K. Closed-Test-Section Wind Tunnel Blockage Corrections for Road Vehicles; Special Publication SAE SP1176, Society of Automotive Engineers; SAE: Detroit, MI, USA, 1996. [Google Scholar]
- Mercker, E.; Wiedemann, J. On the Correction of Interference Effects in Open Jet Wind Tunnels; Technical Paper; SAE: Detroit, MI, USA, 1996. [Google Scholar]
- Mercker, E.; Wickern, G.; Wiedemann, J. Contemplation of Nozzle Blockage in Open Jet WindTunnels in View of Different ‘Q’ Determination Techniques; SAE 970136; Society of Automotive Engineers: Detroit, MI, USA, 1997. [Google Scholar]
- Wickern, G. On the Application of Classical Wind Tunnel Corrections for Automotive Bodies; 2001-01-0633; Society of Automotive Engineers: Detroit, MI, USA, 2001. [Google Scholar] [CrossRef]
- Wickern, G.; Schwartekopp, B. Correction of Nozzle Gradient Effects in Open Jet Wind Tunnels; 2004-01-0669; Society of Automotive Engineers: Detroit, MI, USA, 2004. [Google Scholar] [CrossRef]
- Hoffman, J.; Martindale, B.; Arnette, S.; Williams, J.; Wallis, S. Effect of Test Section Configuration on Aerodynamic Drag Measurements; 2001-01-0631; Society of Automotive Engineers: Detroit, MI, USA, 2001. [Google Scholar] [CrossRef]
- Hoffman, J.; Martindale, B.; Arnette, S.; Williams, J.; Wallis, S. Development of Lift and Drag Corrections for Open Jet Wind Tunnel Tests for an Extended Range of Vehicle Shapes; 2003-01-0934; Society of Automotive Engineers: Detroit, MI, USA, 2003. [Google Scholar] [CrossRef]
- Mercker, E.; Cooper, K.R.; Fischer, O.; Wiedemann, J. The Influence of a Horizontal Pressure Distribution on Aerodynamic Drag in Open and Closed Wind Tunnels; 2005-01-0867; Society of Automotive Engineers: Detroit, MI, USA, 2005. [Google Scholar] [CrossRef]
- Mercker, E.; Cooper, K.R. A Two-Measurement Correction for the Effects of a Pressure Gradient on Automotive, Open-Jet, Wind Tunnel Measurements; 2006-01-0568; Society of Automotive Engineers: Detroit, MI, USA, 2006. [Google Scholar] [CrossRef]
- Lounsberry, T.; Walter, J. Practical Implementation of the Two-Measurement Correction Method in Automotive Wind Tunnels. SAE Int. J. Passeng. Cars Mech. Syst. 2015, 8, 676–686. [Google Scholar] [CrossRef]
- Gleason, M. CFD Analysis of Various Automotive Bodies in Linear Static Pressure Gradients; 2012-01-0298; Society of Automotive Engineers: Detroit, MI, USA, 2012. [Google Scholar] [CrossRef]
- Gleason, M.E.; Lounsberry, T.; Sbeih, K.; Surapaneni, S. CFD Analysis of Automotive Bodies in Static Pressure Gradients; 2014-01-0612; Society of Automotive Engineers: Detroit, MI, USA, 2014. [Google Scholar] [CrossRef]
- Hucho, W.-h.; Sovran, G. Aerodynamics of road vehicles. Ann. Rev. Fluid Mech. 1993, 25, 485–537. [Google Scholar] [CrossRef]
- Soares, R.F.; Garry, K.F.; Holt, J. Comparison of the Far-Field Aerodynamic Wake Development for Three Drivaer Model Configurations using a Cost-Effective RANS Simulation; 2017-01-1514; Society of Automotive Engineers: Detroit, MI, USA, 2017. [Google Scholar]
- Aljure, D.E.; Calafell, J.; Baez, A.; Oliva, A. Flow over a realistic car model: Wall modeled large eddy simulations assessment and unsteady effects. J. Wind Eng. Ind. Aerodyn. 2018, 174, 225–240. [Google Scholar] [CrossRef] [Green Version]
- Roy, A.; Dasgupta, D. Towards a novel strategy for safety, stability and driving dynamics enhancement during cornering manoeuvres in motorsports applications. Sci. Rep. 2020, 10, 1–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gaylard, A.P. The Appropriate Use of CFD in the Automotive Design Process; 2009-01-1162; Society of Automotive Engineers: Detroit, MI, USA, 2009. [Google Scholar] [CrossRef]
- Ueno, D.; Hu, G.; Komada, I.; Otaki, K.; Fan, Q. CFD Analysis in Research and Development of Racing Car; 2006-01-3646; Society of Automotive Engineers: Detroit, MI, USA, 2006. [Google Scholar] [CrossRef]
- Cyr, S.; Ih, K.D.; Park, S.H. Accurate Reproduction of Wind-Tunnel Results with CFD; 2011-01-0158; Society of Automotive Engineers: Detroit, MI, USA, 2011. [Google Scholar] [CrossRef]
- Wickern, G.; Dietz, S.; Luehrmann, L. Gradient Effects on Drag Due to Boundary-Layer Suction in Automotive Wind Tunnels; 2003-01-0655; Society of Automotive Engineers: Detroit, MI, USA, 2003. [Google Scholar] [CrossRef]
- Buscariolo, F.F.; de Campos Mariani, A.L. Analysis of Different Types of Wind Tunnel’s Ground Configuration Using Numerical Simulation; 2010-36-0078; Society of Automotive Engineers: Detroit, MI, USA, 2010. [Google Scholar] [CrossRef]
- Hennig, A.; Widdecke, N.; Kuthada, T.; Wiedemann, J. Numerical Comparison of Rolling Road Systems. SAE Int. J. Engines 2011, 4, 2659–2670. [Google Scholar] [CrossRef]
- Meederira, P.; Fadler, G.; Uddin, M. Numerical Investigation on the Characterization of Interaction Between the Tire-Wake-Vortices and 5-Belt MGP Turntable; SAE Technical Paper 2020-01-0683; Society of Automotive Engineers: Detroit, MI, USA, 2020. [CrossRef]
- Koitrand, S.; Lofdahl, L.; Rehnberg, S.; Gaylard, A. A Computational Investigation of Ground Simulation for a Saloon Car. SAE Int. J. Commer. Veh. 2014, 7, 111–123. [Google Scholar] [CrossRef]
- Wäschle, A.; Cyr, S.; Kuthada, T.; Wiedemann, J. Flow Around an Isolated Wheel—Experimental and Numerical Comparison of Two CFD Codes; 2004-01-0445; Society of Automotive Engineers: Detroit, MI, USA, 2004. [Google Scholar] [CrossRef]
- Elofsson, P.; Bannister, M. Drag Reduction Mechanisms Due to Moving Ground and Wheel Rotation in Passenger Cars; 2002-01-0531; Society of Automotive Engineers: Detroit, MI, USA, 2002. [Google Scholar] [CrossRef]
- Misar, A.S.; Uddin, M.; Robinson, A.; Fu, C. Numerical Analysis of Flow around an Isolated Rotating Wheel Using a Sliding Mesh Technique; 2020-01-0675 SAE Technical Paper; Society of Automotive Engineers: Detroit, MI, USA, 2020. [Google Scholar]
- Fischer, O.; Kuthada, T.; Mercker, E.; Wiedemann, J.; Duncan, B. CFD Approach to Evaluate Wind-Tunnel and Model Setup Effects on Aerodynamic Drag and Lift for Detailed Vehicles; 2010-01-0760; Society of Automotive Engineers: Detroit, MI, USA, 2010. [Google Scholar] [CrossRef]
- Kandasamy, S.; Duncan, B.; Gau, H.; Maroy, F.; Belanger, A.; Gruen, N.; Schäufele, S. Aerodynamic Performance Assessment of BMW Validation Models using Computational Fluid Dynamics; 2012-01-0297; Society of Automotive Engineers: Detroit, MI, USA, 2012. [Google Scholar] [CrossRef]
- Ashton, N.; West, A.; Lardeau, S.; Revell, A. Assessment of RANS and DES methods for realistic automotive models. Comput. Fluids 2016, 128, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Guilmineau, E.; Deng, G.B.; Leroyer, A.; Queutey, P. Assessment of hybrid RANS-LES formulations for flow simulation around the Ahmed body. Comput. Fluids 2018, 176, 302–319. [Google Scholar] [CrossRef]
- Zhang, C.; Bounds, C.P.; Foster, L.; Uddin, M. Turbulence Modeling Effects on the CFD Predictions of Flow over a Detailed Full-Scale Sedan Vehicle. Fluids 2019, 4, 148. [Google Scholar] [CrossRef] [Green Version]
- Fu, C.; Uddin, M.; Robinson, C.; Guzman, A.; Bailey, D. Turbulence models and model closure coefficients sensitivity of NASCAR Racecar RANS CFD aerodynamic predictions. SAE Int. J. Passeng. Cars-Mech. Syst. 2017, 10, 330–344. [Google Scholar] [CrossRef]
- Fu, C.; Uddin, M.; Robinson, A.C. Turbulence modeling effects on the CFD predictions of flow over a NASCAR Gen 6 racecar. J. Wind Eng. Ind. Aerodyn. 2018, 176, 98–111. [Google Scholar] [CrossRef]
- Fu, C.; Uddin, M.; Selent, C. The Effect of Inlet Turbulence Specifications on the RANS CFD Predictions of a NASCAR Gen-6 Racecar; No. 2018-01-0736 SAE Technical Paper; Society of Automotive Engineers: Detroit, MI, USA, 2018. [Google Scholar]
- Fu, C.; Bounds, C.; Uddin, M.; Selent, C. Fine Tuning the SST k− ω Turbulence Model Closure Coefficients for Improved NASCAR Cup Racecar Aerodynamic Predictions. SAE Int. J. Adv. Curr. Pract. Mobil. 2019, 1, 1226–1232. [Google Scholar] [CrossRef]
- Fu, C.; Bounds, C.P.; Selent, C.; Uddin, M. Turbulence modeling effects on the aerodynamic characterizations of a NASCAR Generation 6 racecar subject to yaw and pitch changes, Proceedings of the Institution of Mechanical Engineers. Part D J. Autom. Eng. 2019, 233, 3600–3620. [Google Scholar] [CrossRef]
- Connor, C.; Kharazi, A.; Walter, J.; Martindale, B. Comparison of Wind Tunnel Configurations for Testing Closed-Wheel Race Cars: A CFD Study; 2006-01-3620; Society of Automotive Engineers: Detroit, MI, USA, 2006. [Google Scholar] [CrossRef]
- Kim, M.S.; Lee, J.H.; Kee, J.D.; Chang, J.H. Hyundai Full Scale Aero-acoustic Wind Tunnel; 2001-01-0629; Society of Automotive Engineers: Detroit, MI, USA, 2001. [Google Scholar] [CrossRef]
- Fischer, O.; Kuthada, T.; Wiedemann, J.; Dethioux, P.; Mann, R.; Duncan, B. CFD Validation Study for a Sedan Scale Model in an Open Jet Wind Tunnel; 2008-01-0325; Society of Automotive Engineers: Detroit, MI, USA, 2008. [Google Scholar] [CrossRef]
- Shih, T.H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A New k-Epsilon Eddy Viscosity Model for High Reynolds Number Turbulent Flows: Model Development and Validation; NASA-TM-106721; NASA Lewis Research Center: Cleveland, OH, USA, 1994. [Google Scholar]
- Menter, F.R. Improved two-equation k-omega turbulence models for aerodynamic flows. NASA STI/Recon Tech. Rep. News 1992, 93, 22809. [Google Scholar]
- Cooper, K.R.; Mercker, E.; Müller, J. The necessity for boundary corrections in a standard practice for the open-jet wind tunnel testing of automobiles. Proceedings of the Institution of Mechanical Engineers. Part D J. Autom. Eng. 2017, 231, 1245–1273. [Google Scholar] [CrossRef]
- Glauert, H. Wind Tunnel Interference on Wings, Bodies and Airscrews. Aeronautical Research Committee Reports and Memoranda 1566; HM Stationery Office: London, UK, 1933. [Google Scholar]
- Wäschle, A. The Influence of Rotating Wheels on Vehicle Aerodynamics—Numerical and Experimental Investigations; 2007-01-0107; Society of Automotive Engineers: Detroit, MI, USA, 2007. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Level | 1 | 2 | 3 | 4 | 5 |
| Grid Size (mm) | 24 | 48 | 96 | 192 | 384 |
| Original Spoiler | Improved Spoiler | ||
|---|---|---|---|
| Wind-tunnel | 0.328 | 0.326 | 0.002 |
| CFD | 0.338 | 0.336 | 0.002 |
| Original Spoiler | Improved Spoiler | |
|---|---|---|
| Static Floor | 0.338 | 0.336 |
| Moving Floor | 0.333 | 0.331 |
| 0.005 | 0.005 |
| HAWT | ||
| Static Floor | 0.338 | 0.157 |
| Moving Floor | 0.333 | 0.105 |
| Delta () | 0.005 | 0.052 |
| Free Air | ||
| Static Floor | 0.326 | 0.140 |
| Moving Floor | 0.320 | 0.098 |
| Delta () | 0.006 | 0.042 |
| Test Section Blockage Ratio | 1.25% (HAWT) | 0.56% | 0.30% | 0.04% |
|---|---|---|---|---|
| 0.333 | 0.328 | 0.325 | 0.320 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, C.; Uddin, M.; Zhang, C. Computational Analyses of the Effects of Wind Tunnel Ground Simulation and Blockage Ratio on the Aerodynamic Prediction of Flow over a Passenger Vehicle. Vehicles 2020, 2, 318-341. https://doi.org/10.3390/vehicles2020018
Fu C, Uddin M, Zhang C. Computational Analyses of the Effects of Wind Tunnel Ground Simulation and Blockage Ratio on the Aerodynamic Prediction of Flow over a Passenger Vehicle. Vehicles. 2020; 2(2):318-341. https://doi.org/10.3390/vehicles2020018
Chicago/Turabian StyleFu, Chen, Mesbah Uddin, and Chunhui Zhang. 2020. "Computational Analyses of the Effects of Wind Tunnel Ground Simulation and Blockage Ratio on the Aerodynamic Prediction of Flow over a Passenger Vehicle" Vehicles 2, no. 2: 318-341. https://doi.org/10.3390/vehicles2020018