
Transmission Line Fault Classification of Multi-Dataset Using CatBoost Classifier



Abstract
:1. Introduction
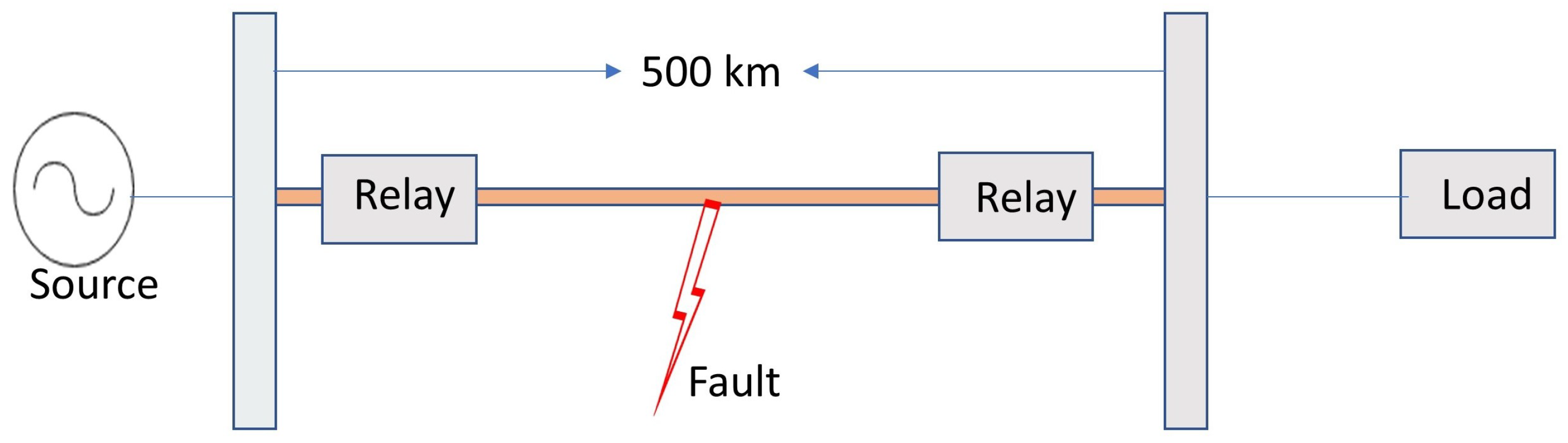
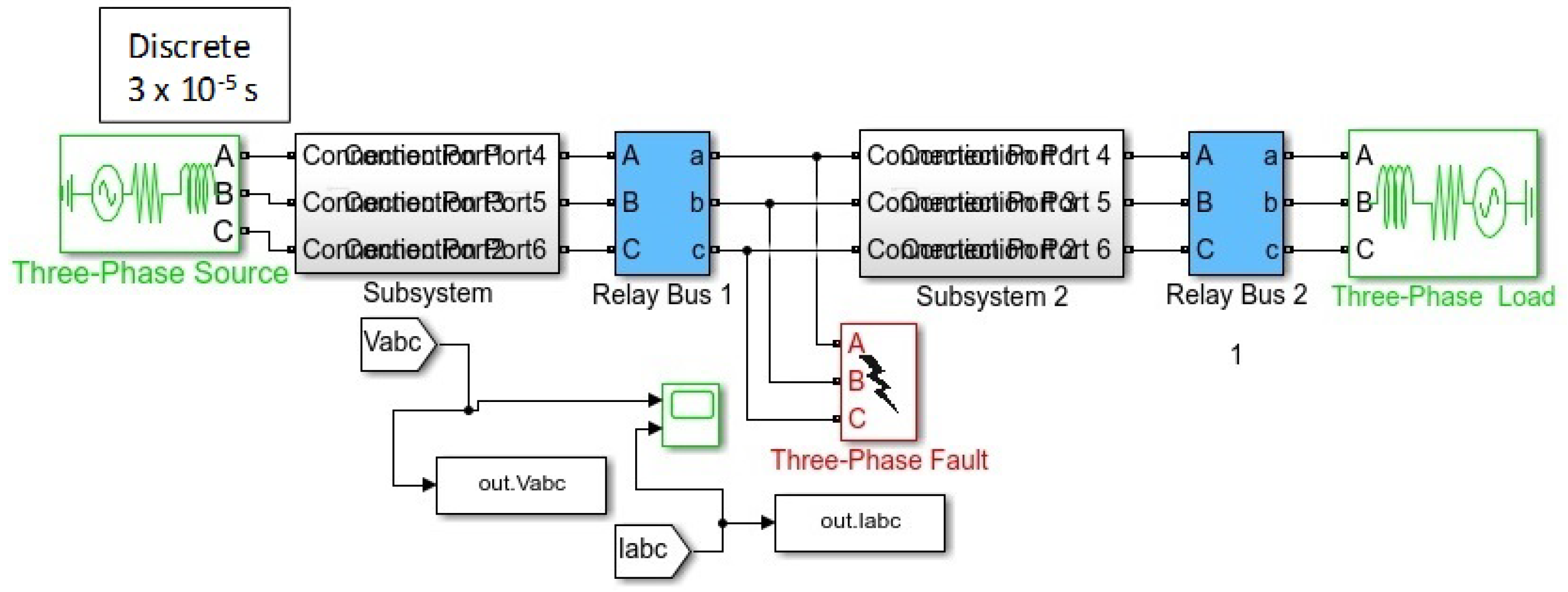
2. Modelling of 330 kV Transmission Line
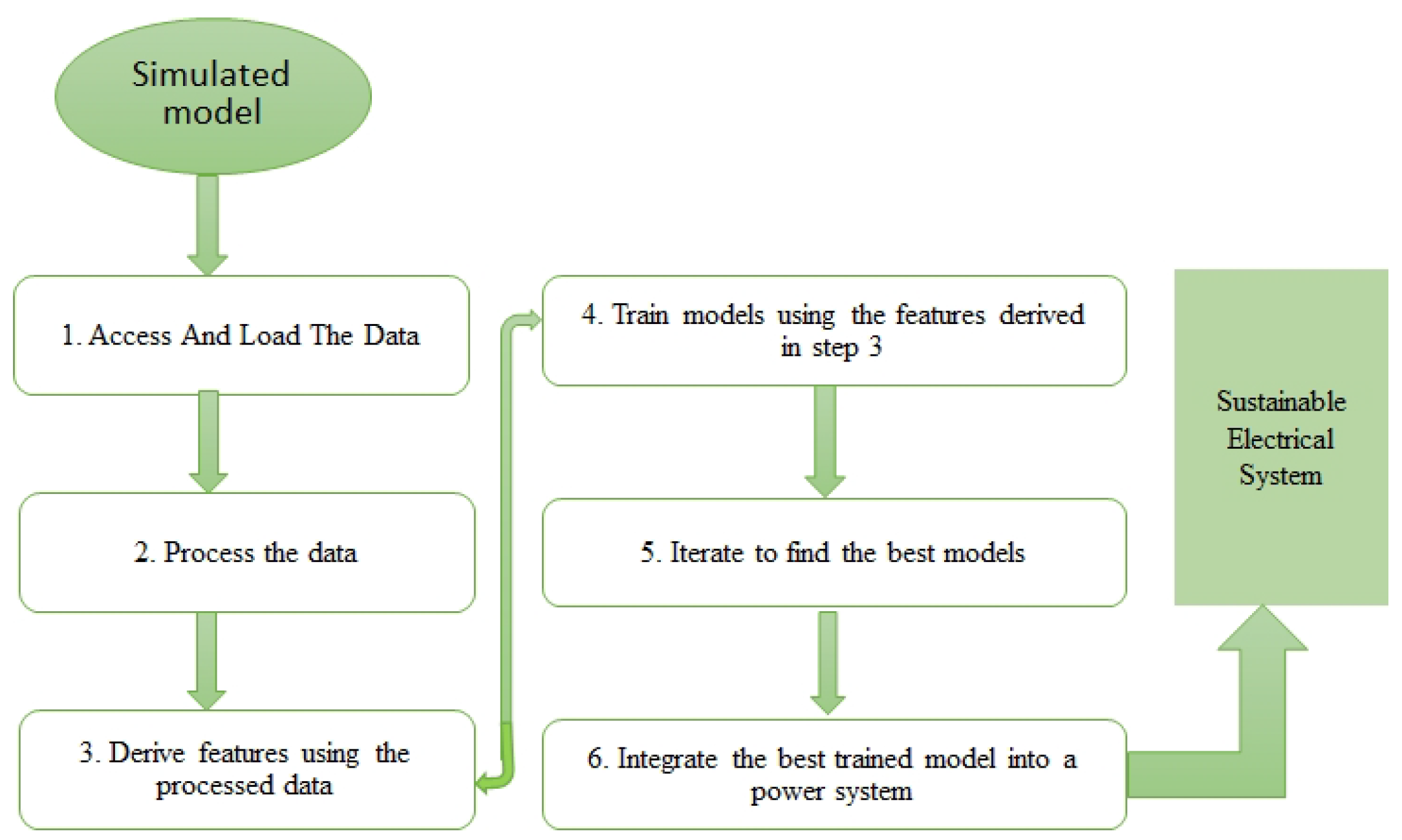
3. Methodology
3.1. Data Preparation and Extraction
3.2. The Use of CatBoost in Fault Classification
3.3. Training of Datasets Using CatBoost Algorithm
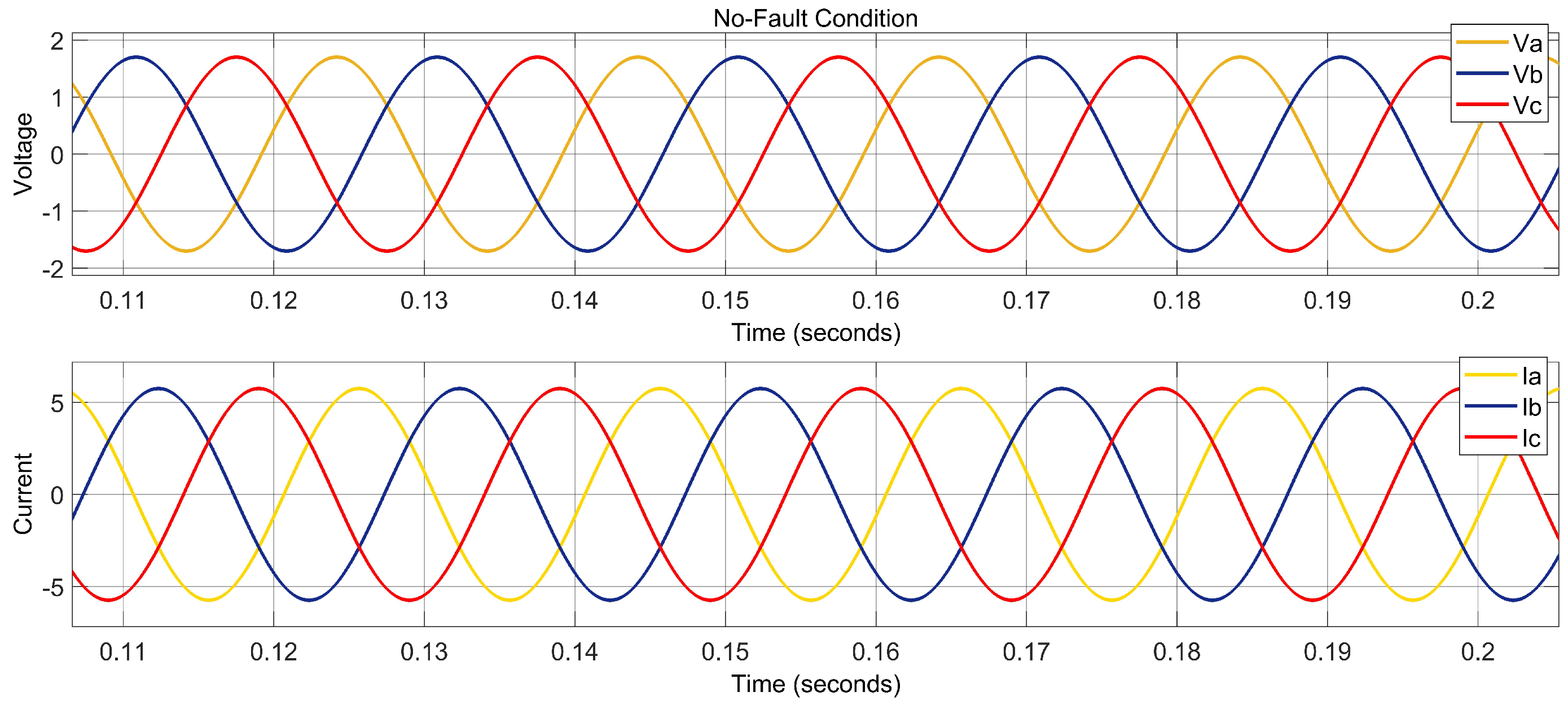
4. Results and Discussion
5. Discussion
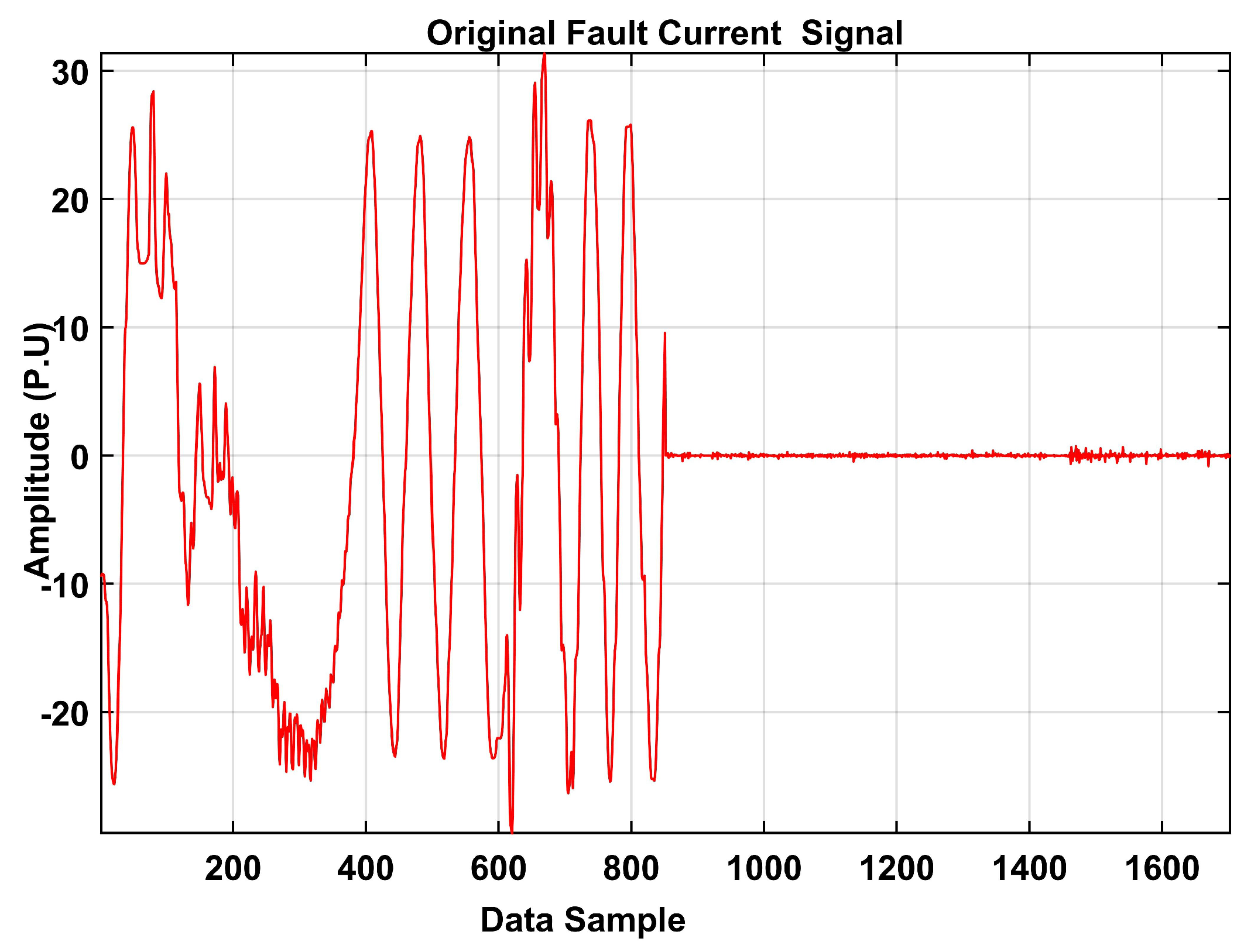
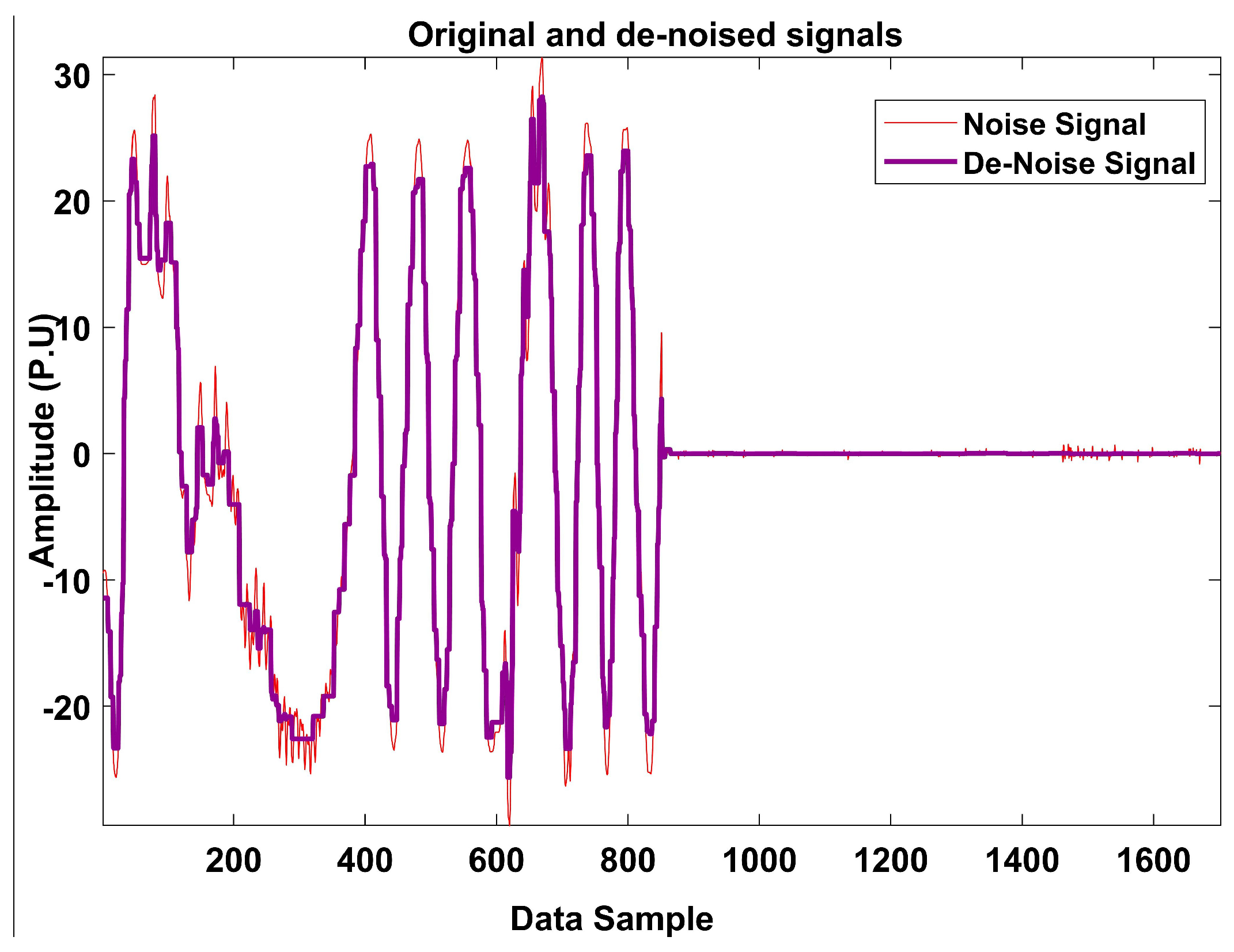
The Effect of Noise and Disturbance in the Proposed Algorithm
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, M.R.; Chopra, T.; Singh, R.; Chopra, T. Fault classification in electric power transmission lines using support vector machine. Int. J. Innov. Res. Sci. Technol. 2015, 1, 388–400. [Google Scholar]
- Chang, G.W.; Hong, Y.H.; Li, G.Y. A hybrid intelligent approach for classification of incipient faults in transmission network. IEEE Trans. Power Deliv. 2019, 34, 1785–1794. [Google Scholar] [CrossRef]
- Rahmati, A.; Adhami, R. A fault detection and classification technique based on sequential components. IEEE Trans. Ind. Appl. 2014, 50, 4202–4209. [Google Scholar] [CrossRef]
- Chen, K.; Huang, C.; He, J. Fault detection, classification and location for transmission lines and distribution systems: A review on the methods. High Volt. 2016, 1, 25–33. [Google Scholar] [CrossRef]
- Swetapadma, A.; Yadav, A. An artificial neural network-based solution to locate the multilocation faults in double circuit series capacitor compensated transmission lines. Int. Trans. Electr. Energy Syst. 2018, 28, e2517. [Google Scholar] [CrossRef]
- Uzubi, U.; Ekwue, A.; Ejiogu, E. Artificial neural network technique for transmission line protection on Nigerian power system. In Proceedings of the 2017 IEEE PES PowerAfrica, Accra, Ghana, 27–30 June 2017; pp. 52–58. [Google Scholar]
- Dos Santos, R.C.; Senger, E.C. Transmission lines distance protection using artificial neural networks. Int. J. Electr. Power Energy Syst. 2011, 33, 721–730. [Google Scholar] [CrossRef]
- Prasad, A.; Edward, J.B. Importance of artificial neural networks for location of faults in transmission systems: A survey. In Proceedings of the 2017 11th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 5–6 January 2017; pp. 357–362. [Google Scholar]
- Manke, P.R.; Tembhurne, S. Artificial neural network classification of power quality disturbances using time-frequency plane in industries. In Proceedings of the 2008 First International Conference on Emerging Trends in Engineering and Technology, Nagpur, India, 16–18 July 2008; pp. 564–568. [Google Scholar]
- Reddy, M.J.B.; Gopakumar, P.; Mohanta, D. A novel transmission line protection using DOST and SVM. Eng. Sci. Technol. Int. J. 2016, 19, 1027–1039. [Google Scholar]
- Alsubhi, S.R.; Laabidi, K.; Hsairi, L. Comparison of Several Artificial Neural Network Approaches for Fault Classification in Power Transmission Lines. In Proceedings of the 7th International Conference on Engineering & MIS 2021, Almaty, Kazakhstan, 11–13 October 2021; pp. 1–6. [Google Scholar]
- Abdulwahid, A.H. A new concept of an intelligent protection system based on a discrete wavelet transform and neural network method for smart grids. In Proceedings of the 2019 2nd International Conference of the IEEE Nigeria Computer Chapter (NigeriaComputConf), Zaria, Nigeria, 14–17 October 2019; pp. 1–6. [Google Scholar]
- Costa, F.B.; Silva, K.M.; Souza, B.A.; Dantas, K.M.C.; Brito, N.S.D. A method for fault classification in transmission lines based on ann and wavelet coefficients energy. In Proceedings of the The 2006 IEEE International Joint Conference on Neural Network Proceedings, Vancouver, BC, Canada, 16–21 July 2006; pp. 3700–3705. [Google Scholar]
- Roy, N.; Bhattacharya, K. Detection, classification, and estimation of fault location on an overhead transmission line using S-transform and neural network. Electr. Power Compon. Syst. 2015, 43, 461–472. [Google Scholar] [CrossRef]
- Rai, P.; Londhe, N.D.; Raj, R. Fault classification in power system distribution network integrated with distributed generators using CNN. Electr. Power Syst. Res. 2021, 192, 106914. [Google Scholar] [CrossRef]
- Chopra, P.; Yadav, S.K. PCA and feature correlation for fault detection and classification. In Proceedings of the 2015 IEEE Recent Advances in Intelligent Computational Systems (RAICS), Trivandrum, India, 10–12 December 2015; pp. 195–200. [Google Scholar]
- Ni, J.; Zhang, C.; Yang, S.X. An adaptive approach based on KPCA and SVM for real-time fault diagnosis of HVCBs. IEEE Trans. Power Deliv. 2011, 26, 1960–1971. [Google Scholar] [CrossRef]
- Wang, Q.; Wei, B.; Liu, J.; Ma, W. Data-Driven Incipient Fault Prediction for Non-Stationary and Non-Linear Rotating Systems: Methodology, Model Construction and Application. IEEE Access 2020, 8, 197134–197146. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, L.; Gao, F. Power system fault classification method based on sparse representation and random dimensionality reduction projection. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Zhao, M.; Fu, X.; Zhang, Y.; Meng, L.; Tang, B. Highly imbalanced fault diagnosis of mechanical systems based on wavelet packet distortion and convolutional neural networks. Adv. Eng. Inform. 2022, 51, 101535. [Google Scholar] [CrossRef]
- Zhao, X.; Yao, J.; Deng, W.; Ding, P.; Ding, Y.; Jia, M.; Liu, Z. Intelligent Fault Diagnosis of Gearbox Under Variable Working Conditions With Adaptive Intraclass and Interclass Convolutional Neural Network. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Yao, J.; Deng, W.; Jia, M.; Liu, Z. Normalized Conditional Variational Auto-Encoder with adaptive Focal loss for imbalanced fault diagnosis of Bearing-Rotor system. Mech. Syst. Signal Process. 2022, 170, 108826. [Google Scholar] [CrossRef]
- Moradzadeh, A.; Teimourzadeh, H.; Mohammadi-Ivatloo, B.; Pourhossein, K. Hybrid CNN-LSTM approaches for identification of type and locations of transmission line faults. Int. J. Electr. Power Energy Syst. 2022, 135, 107563. [Google Scholar] [CrossRef]
- Mishra, D.P.; Samantaray, S.R.; Joos, G. A combined wavelet and data-mining based intelligent protection scheme for microgrid. IEEE Trans. Smart Grid 2015, 7, 2295–2304. [Google Scholar] [CrossRef]
- Ogar, V.N.; Gamage, K.A.; Hussain, S. Protection for 330 kV transmission line and recommendation for Nigerian transmission system: A review. Int. J. Electr. Comput. Eng. 2022, 12, 3320–3334. [Google Scholar] [CrossRef]
- Kar, S.; Samantaray, S.R. Time-frequency transform-based differential scheme for microgrid protection. IET Gener. Transm. Distrib. 2014, 8, 310–320. [Google Scholar] [CrossRef]
- Roy, N.; Bhattacharya, K. Identification and classification of fault using S-transform in an unbalanced network. In Proceedings of the 2013 IEEE 1st International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Kolkata, India, 6–8 December 2013; pp. 111–115. [Google Scholar]
- Raza, A.; Benrabah, A.; Alquthami, T.; Akmal, M. A review of fault diagnosing methods in power transmission systems. Appl. Sci. 2020, 10, 1312. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, A.; Kundu, P.K.; Das, A. A supervised principal component analysis-based approach of fault localization in transmission lines for single line to ground faults. Electr. Eng. 2021, 103, 2113–2126. [Google Scholar] [CrossRef]
- Elnozahy, A.; Sayed, K.; Bahyeldin, M. Artificial neural network based fault classification and location for transmission lines. In Proceedings of the 2019 IEEE Conference on Power Electronics and Renewable Energy (CPERE), Aswan, Egypt, 23–25 October 2019; pp. 140–144. [Google Scholar]
- Al-Shaibani, S.A.; Bhalchandra, P. A Framework for Implementing Prediction Algorithm over Cloud Data as a Procedure for Cloud Data Mining. J. Electr. Electron. Eng. 2021, 2, 1–8. [Google Scholar] [CrossRef]
- Godse, R.; Bhat, S. Mathematical morphology-based feature-extraction technique for detection and classification of faults on power transmission line. IEEE Access 2020, 8, 38459–38471. [Google Scholar] [CrossRef]
- De Andrade, V.; Sorrentino, E. Typical expected values of the fault resistance in power systems. In Proceedings of the 2010 IEEE/PES Transmission and Distribution Conference and Exposition: Latin America (T&D-LA), Sao Paulo, Brazil, 8–10 November 2010; pp. 602–609. [Google Scholar]
- Sweeting, D. Applying IEC 60909, fault current calculations. IEEE Trans. Ind. Appl. 2011, 48, 575–580. [Google Scholar] [CrossRef]
- Prokhorenkova, L.; Gusev, G.; Vorobev, A.; Dorogush, A.V.; Gulin, A. CatBoost: Unbiased boosting with categorical features. Adv. Neural Inf. Process. Syst. 2018, 31. [Google Scholar]
- Zhang, Y.; Zhao, Z.; Zheng, J. CatBoost: A new approach for estimating daily reference crop evapotranspiration in arid and semi-arid regions of Northern China. J. Hydrol. 2020, 588, 125087. [Google Scholar] [CrossRef]
- Jamil, M.; Sharma, S.K.; Singh, R. Fault detection and classification in electrical power transmission system using artificial neural network. SpringerPlus 2015, 4, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ibrahim, A.A.; Ridwan, R.L.; Muhamme, M.; Abdulaziz, R.O.; Saheed, G.A. Comparison of the CatBoost classifier with other machine learning methods. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 738–748. [Google Scholar] [CrossRef]
- Mishra, M. Power quality disturbance detection and classification using signal processing and soft computing techniques: A comprehensive review. Int. Trans. Electr. Energy Syst. 2019, 29, e12008. [Google Scholar] [CrossRef] [Green Version]
- Erişti, H.; Uçar, A.; Demir, Y. Wavelet-based feature extraction and selection for classification of power system disturbances using support vector machines. Electr. Power Syst. Res. 2010, 80, 743–752. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Parameter | Value | Unit |
|---|---|---|---|
| Positive and negative sequence resistance | , | 0.01273 | /km |
| Zero sequence resistance | 0.3864 | /km | |
| Positive and negative sequence inductance | , , | 0.9337 × | H/km |
| Zero sequence inductance | 4.1264 × | H/km | |
| Positive and negative sequence capacitance | , , | 12.74 × | F/km |
| Zero sequence capacitance | 7.751 × | F/km |
| System Components | Parameters/Units | Value |
|---|---|---|
| Phase to phase voltage | voltage | 330 |
| Source resistance Rs | Ohms | 0.8929 |
| Source inductance | H | 16.58 × |
| Fault incipient angle | in degree | 0° and −30° |
| Fault resistance | Ohms (Ω) | 0.001 |
| Ground resistance | Ohms (Ω) | 0.01 |
| Snubber resistance | Ohms (Ω) | 1.0 × |
| Fault capacitance | F | infinite |
| Switching time | seconds | 0.2 |
| Class | Fault Type | (a) | (b) | (c) | G (g) |
|---|---|---|---|---|---|
| 1 | a-g | 1 | 0 | 0 | 1 |
| 2 | b-g | 0 | 1 | 0 | 1 |
| 3 | c-g | 0 | 0 | 1 | 1 |
| 4 | a-b | 1 | 1 | 0 | 0 |
| 5 | a-c | 1 | 0 | 1 | 0 |
| 6 | b-c | 0 | 1 | 1 | 0 |
| 7 | a-b-g | 1 | 1 | 0 | 1 |
| 8 | b-c-g | 0 | 1 | 1 | 1 |
| 9 | a-c-g | 1 | 0 | 1 | 1 |
| 10 | a-b-c | 1 | 1 | 1 | 0 |
| 11 | a-b-c-g | 1 | 1 | 1 | 1 |
| 12 | No fault | 0 | 0 | 0 | 0 |
| CatBoost Model is Fitted | True |
|---|---|
| Iterations | 1000 |
| Depth | 10 |
| Loss function | Multiclass |
| Leaf estimation method | Newton |
| Class weight | 0.001, 0.01, 0.9, 0.001 |
| Random strength | 0.1 |
| True Class | 0 | 0 | 0 | 6955 | 0 |
| 1 | 0 | 4862 | 2051 | 0 | |
| 2 | 0 | 0 | 7048 | 0 | |
| 3 | 0 | 0 | 2013 | 5073 | |
| 0 | 1 | 2 | 3 | ||
| Predicted Class |
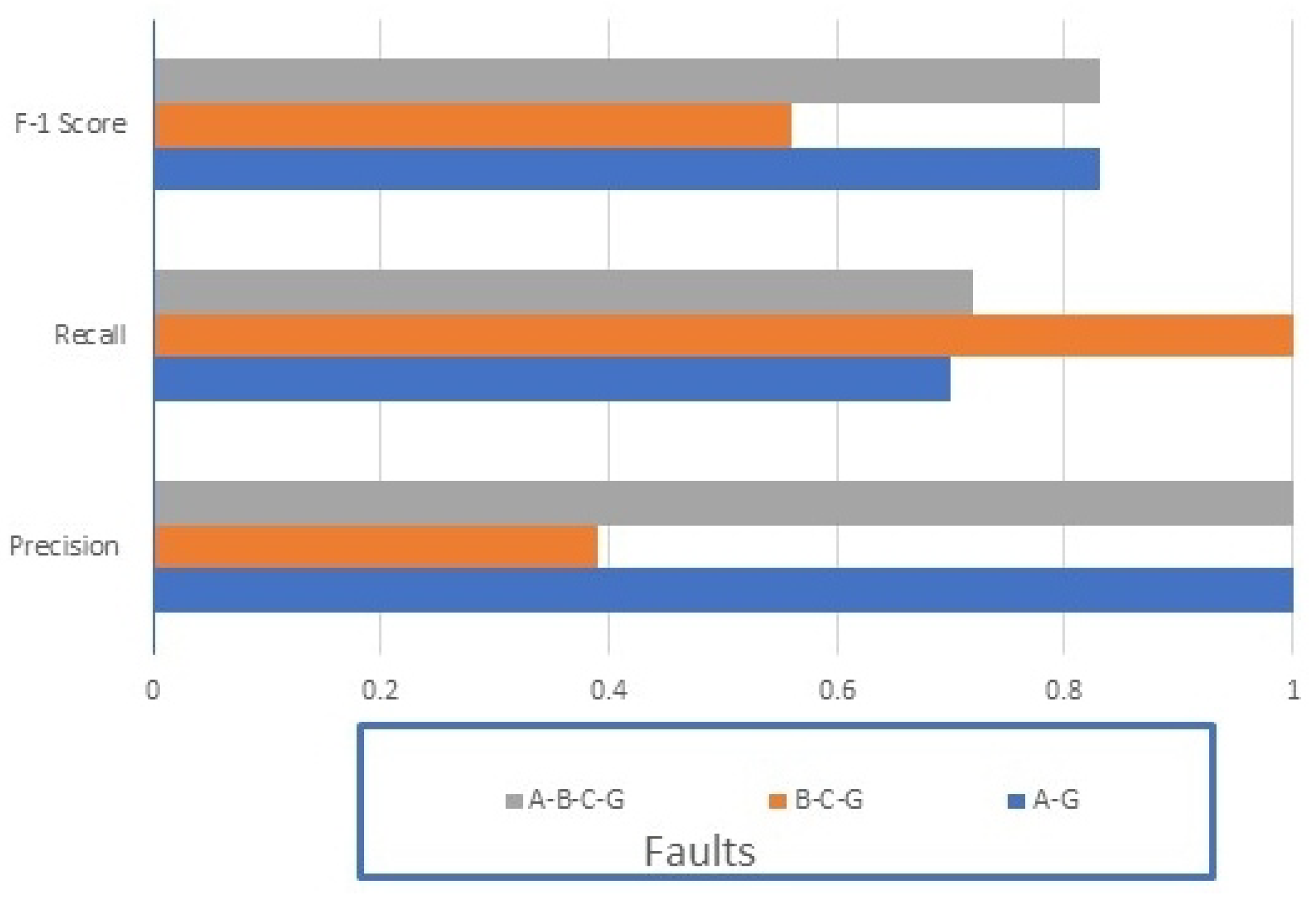
| Fault Type | Classes | Precision | Recall | F1-Score | Support |
|---|---|---|---|---|---|
| A-G | 1 | 1.00 | 0.70 | 0.83 | 6913 |
| B-C-G | 2 | 0.39 | 1.00 | 0.56 | 7048 |
| A-B-C-G | 3 | 1.00 | 0.72 | 0.83 | 7086 |
| No fault | 0 | 0 | 0 | 0 | 0 |
| Micro Avg | 0.61 | 0.81 | 0.69 | 21,047 | |
| Macro Avg | 0.80 | 0.81 | 0.74 | 21,047 | |
| Weighted Avg | 0.80 | 0.81 | 0.74 | 21,047 |
| Technique Used | Input Parameter | Fault Types | Data Size | % Accuracy | Strength | Weakness |
|---|---|---|---|---|---|---|
| WT, CNN [20] | vibration signal | 400 different fault condition | 2400 | 97.78% | speed of 8 s to execute and easy to use | The WT Packet is not theoretically proven. |
| ANN [37] | Three-phase voltage and current waveform | 10 different fault condition | 7920 | 78.1% | Easy to use and implement, Repro- gramming is not needed | Requires a system with a high processor, Longer training time. |
| Proposed CatBoost Classifier | Voltage and current signal | Single-phase fault, double phase fault, three-phase fault and no-fault | 93,340 X 6 | 99.54% | Higher accuracy, speed and low training time.multiple feature classification | It needs a high- performance operating system to train the data. |
| BPNN [11] | Voltage and current | AG, BG, CG, ABG, ACG, BCG, AB, AC, BC, ABC, ABCG | 1188 | 97.3% | easy to execute, it requires less number of neurons for training. | Slow to use, computationally expensive, can’t be used to solve complex andlarge problems. Slow convergence. |
| RBFNN [11] | Voltage and current | AG, BG, CG, ABG, ACG, BCG, AB, AC, BC, ABC, ABCG | 1188 | 99.3% | Faster than BPNN, easy to use. | Not suitable for non-linear systems and large dataset |
| PNN [11] | Voltage and current | AG, BG, CG, ABG, ACG, BCG, AB, AC, BC, ABC, ABCG | 1188 | 99.4% | It can handle multi-dataset to classify faults. Also, no learning process is required. | Expensive to implement, and learning can be slow, high processing time if the network is extensive. |
| RDRP [19] | Voltage signal of 10 dB, 20 dB and 30 dB | Single, double and three-phase fault | 480 | 93.9, 96.8% and 96.8% | It can work well with small datasets | Not suitable for multiple datasets and low prediction accuracy. |
| CNN [16] | Three phase Voltage and current | 10 different fault condition | 92,077 | 99% | Used to solve multi-channel sequence recognition problem | The computational cost of offline mode is expensive |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogar, V.N.; Hussain, S.; Gamage, K.A.A. Transmission Line Fault Classification of Multi-Dataset Using CatBoost Classifier. Signals 2022, 3, 468-482. https://doi.org/10.3390/signals3030027
Ogar VN, Hussain S, Gamage KAA. Transmission Line Fault Classification of Multi-Dataset Using CatBoost Classifier. Signals. 2022; 3(3):468-482. https://doi.org/10.3390/signals3030027
Chicago/Turabian StyleOgar, Vincent Nsed, Sajjad Hussain, and Kelum A. A. Gamage. 2022. "Transmission Line Fault Classification of Multi-Dataset Using CatBoost Classifier" Signals 3, no. 3: 468-482. https://doi.org/10.3390/signals3030027