
Recording, Processing, and Reproduction of Vibrations Produced by Impact Noise Sources in Buildings †
 ,
,
Abstract
:1. Introduction
2. Instruments and Methods of Recording, Processing, and Reproducing Vibrations
2.1. Vibration Recording
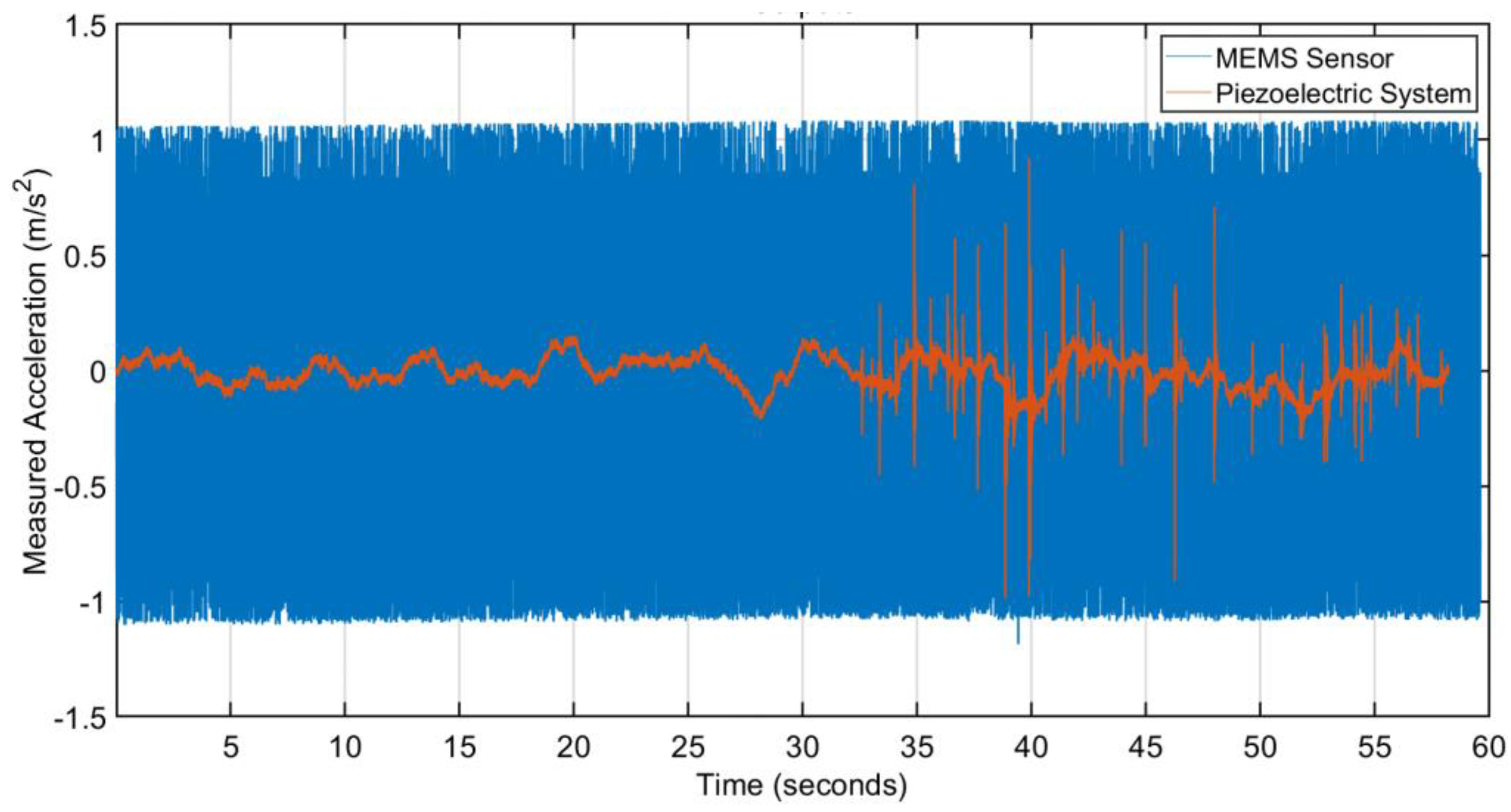
2.1.1. Accelerometer Selection
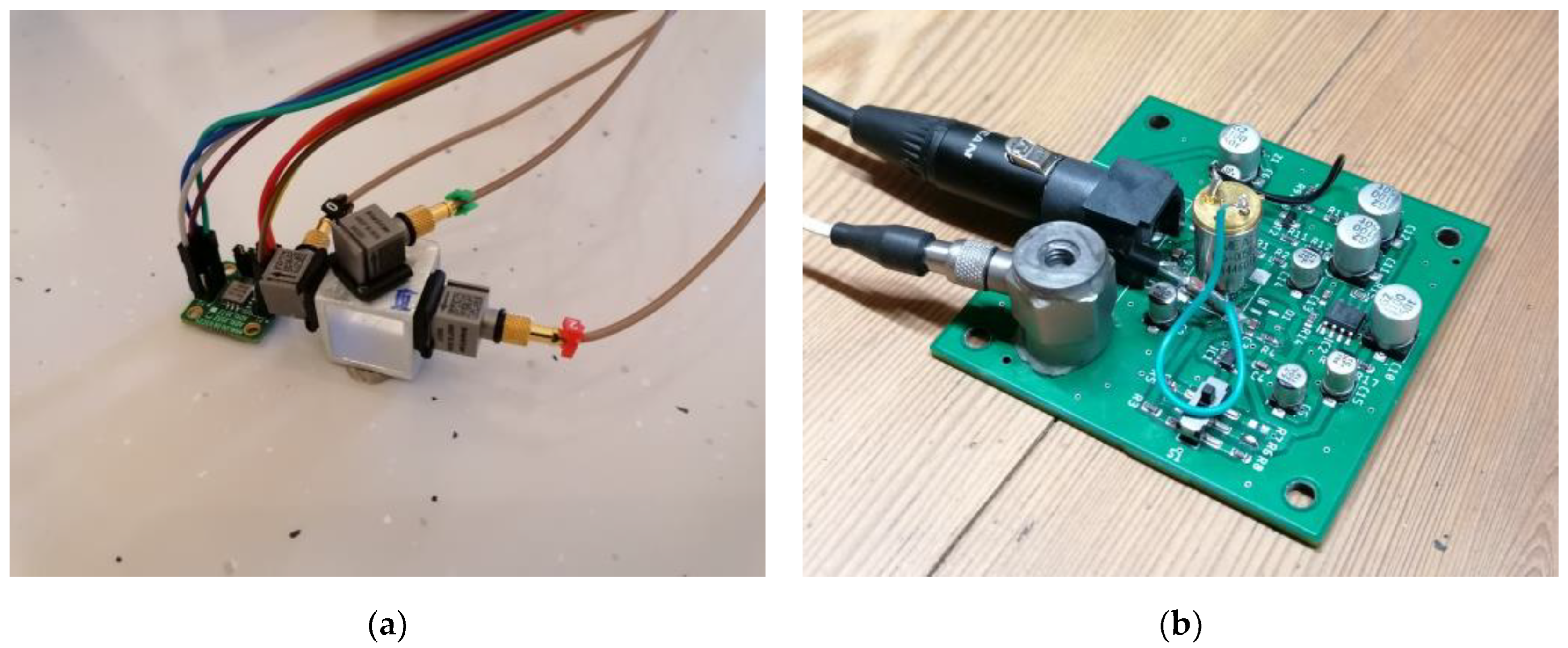
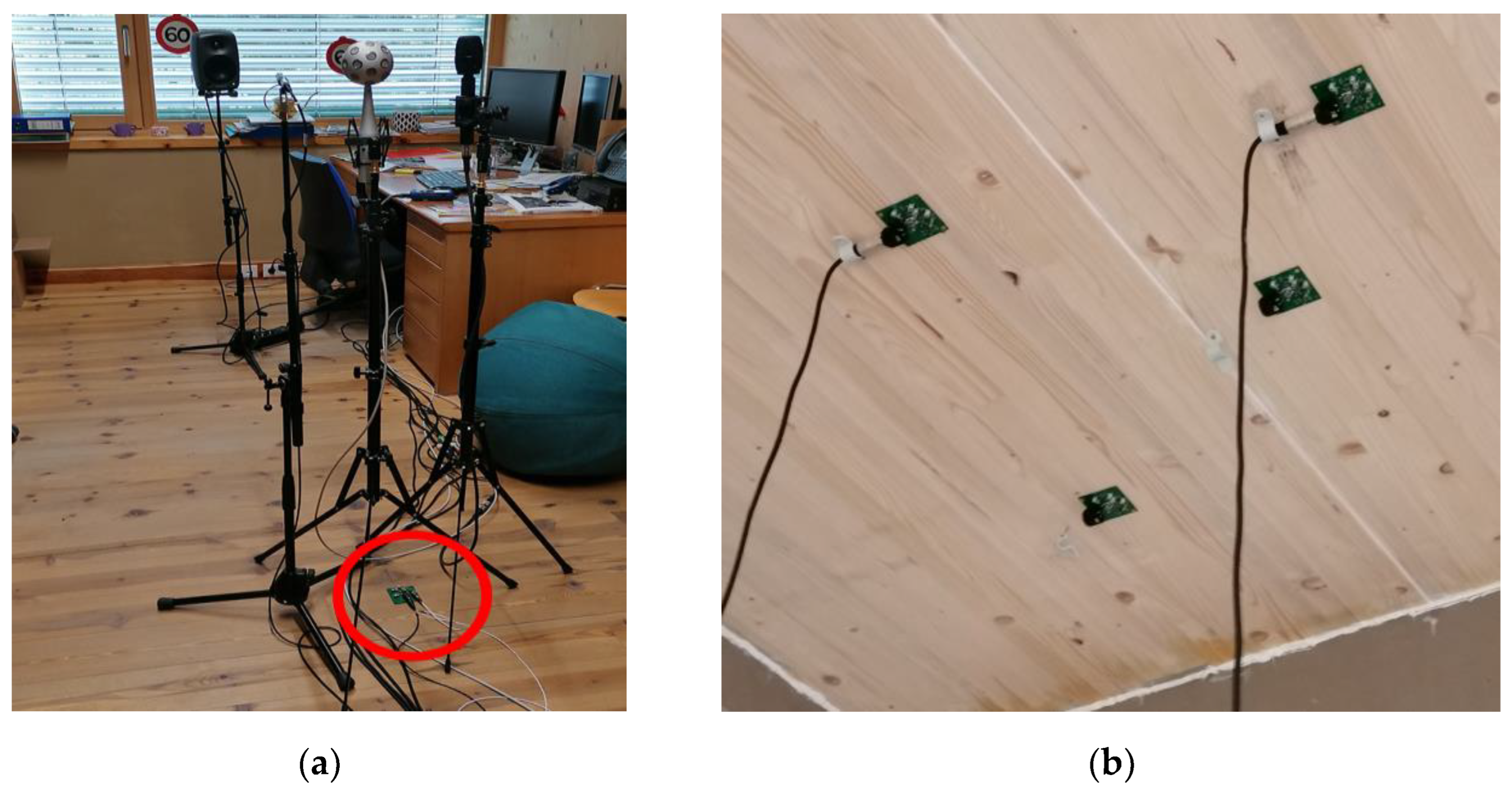
2.1.2. The Design and Initial Experimental Validation
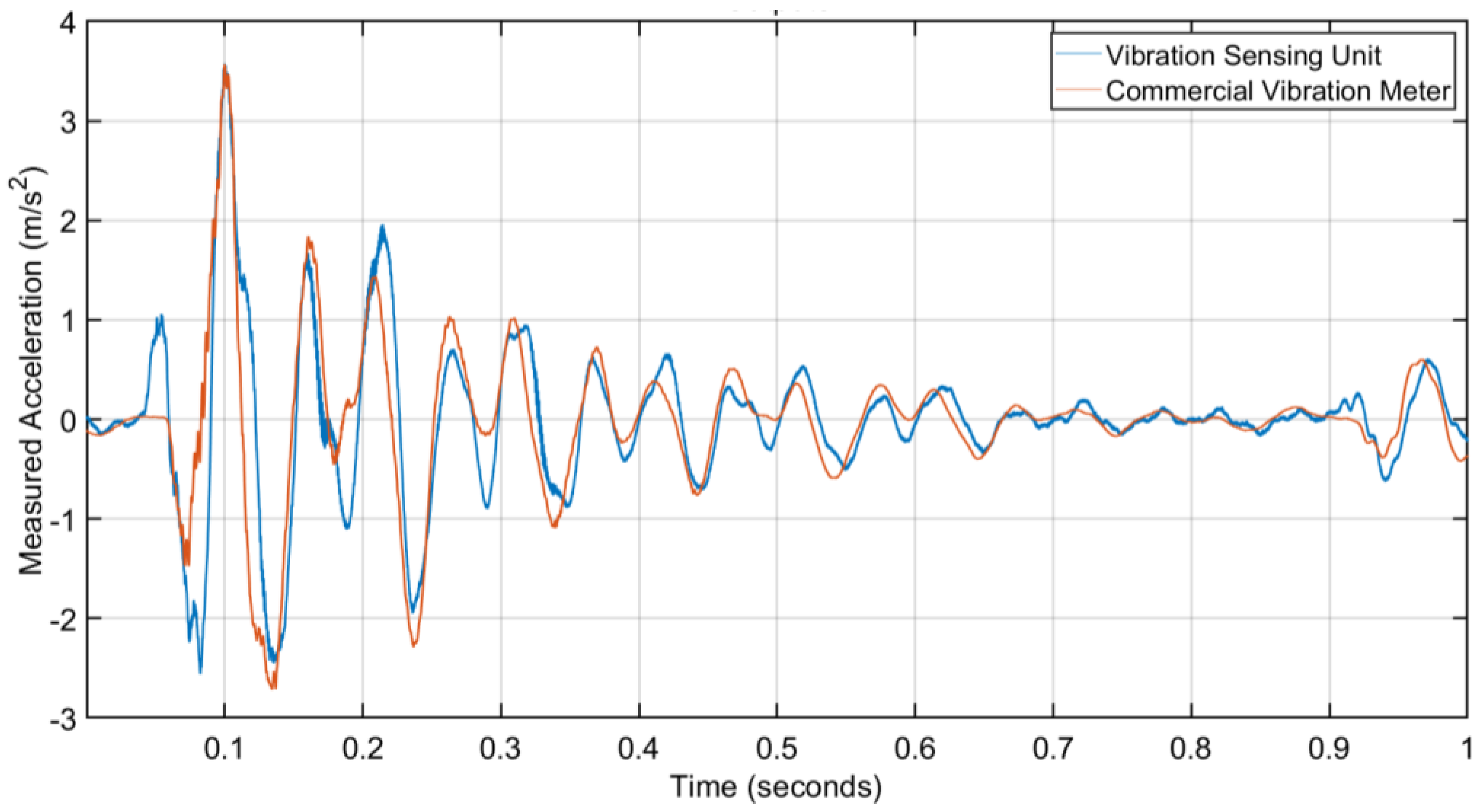
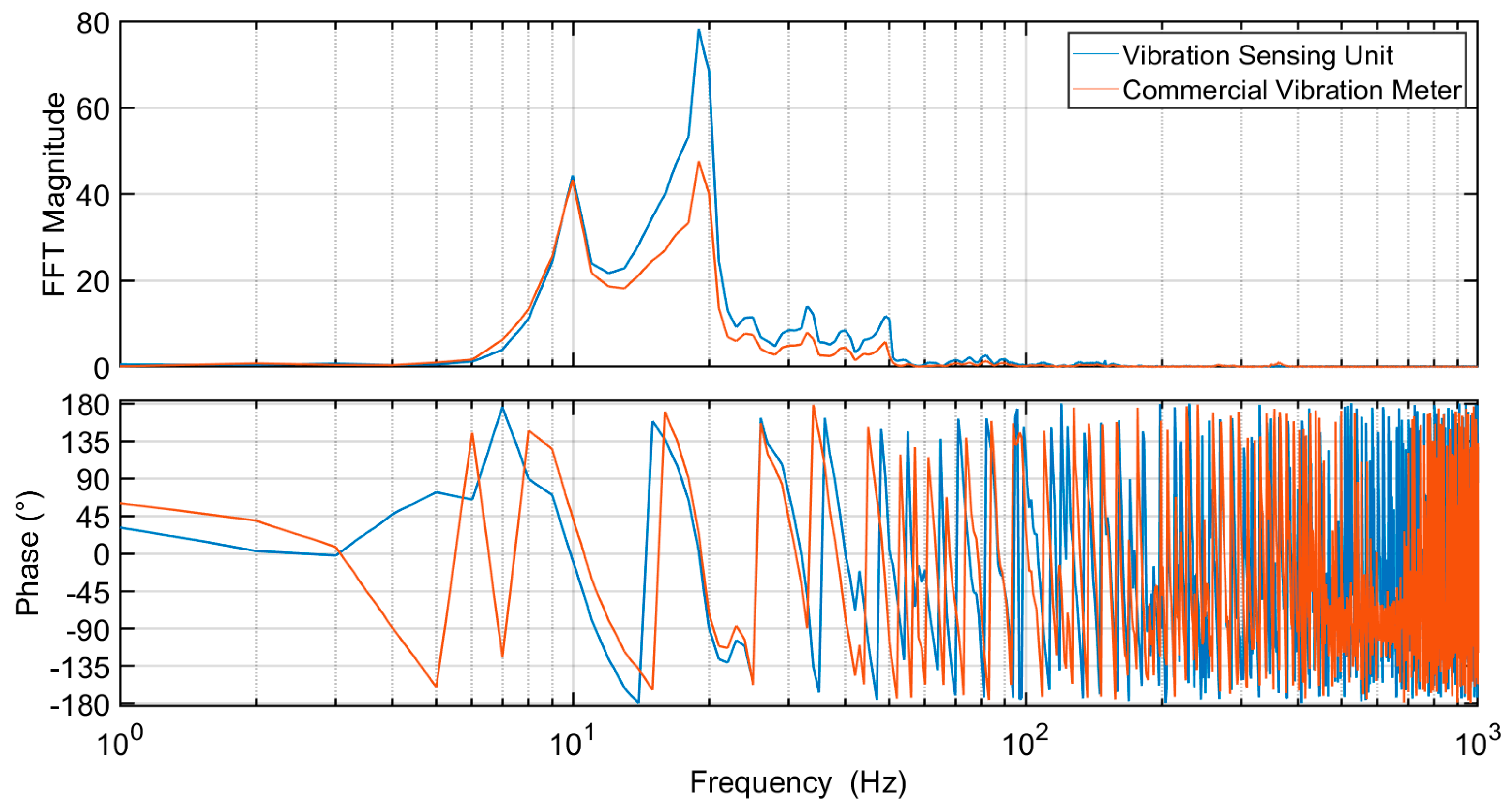
2.1.3. Experimental Validation of the Final VSU Design
2.1.4. Considering the Mass Loading of the VSU
2.2. Vibration Signal Processing
2.2.1. General Method to Capture and Process Vibration Signals from Predefined Impact Noise Sequences
2.2.2. In Situ and Laboratory Recordings
2.3. Vibrations Reproduction
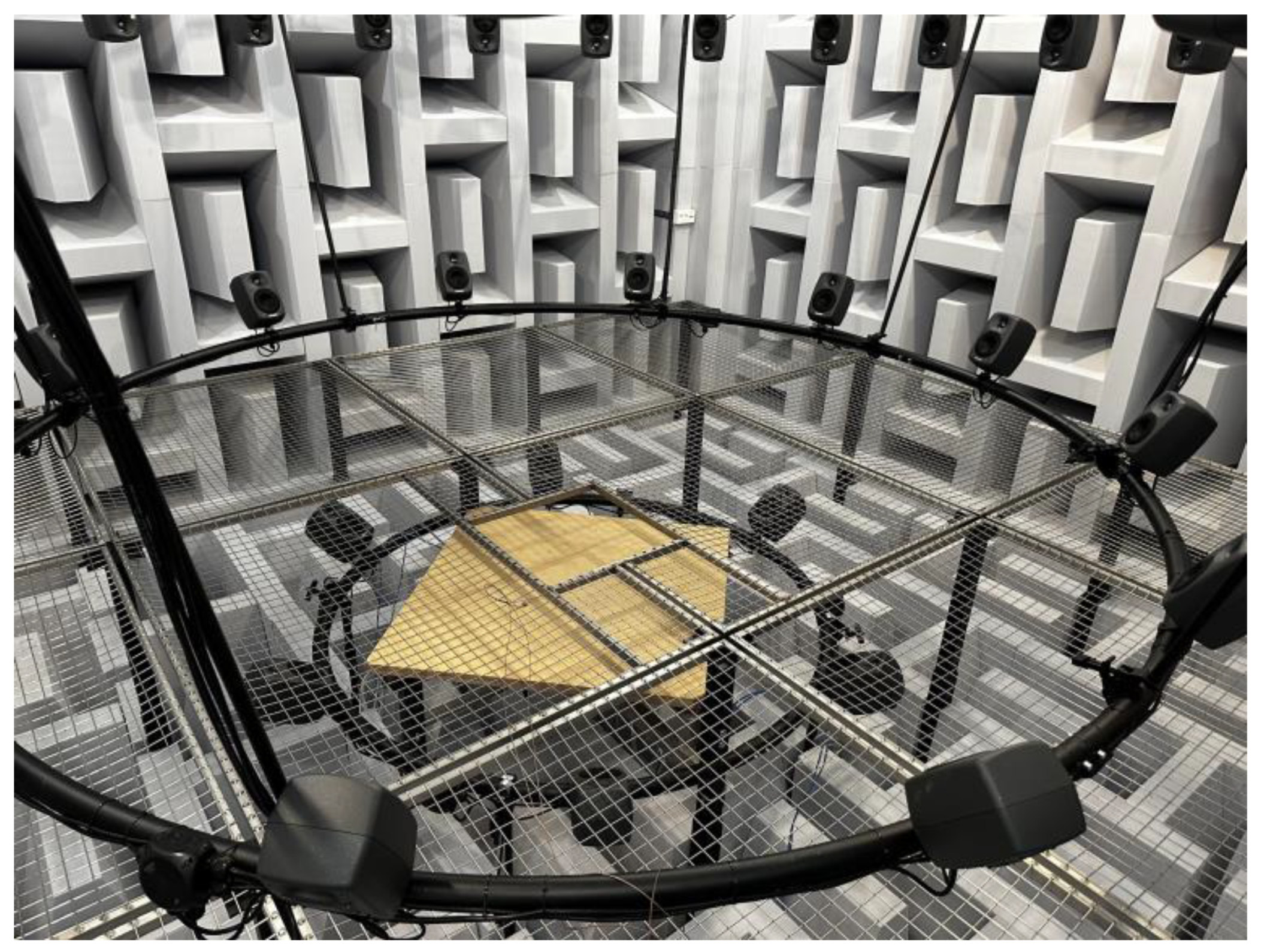
2.3.1. The Design of the Vibration Exposure Device
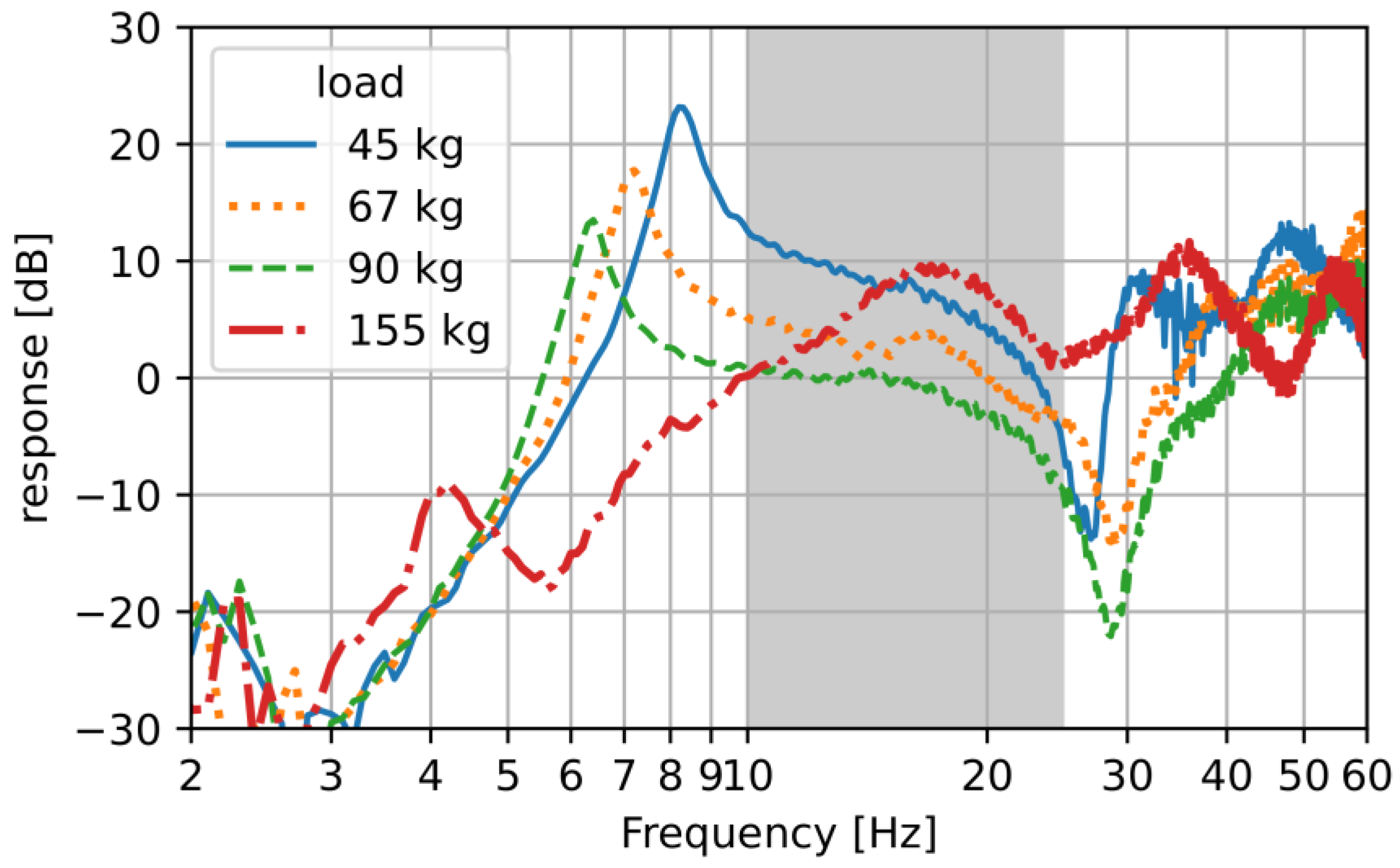
2.3.2. Operating Frequency Range at Different Loads
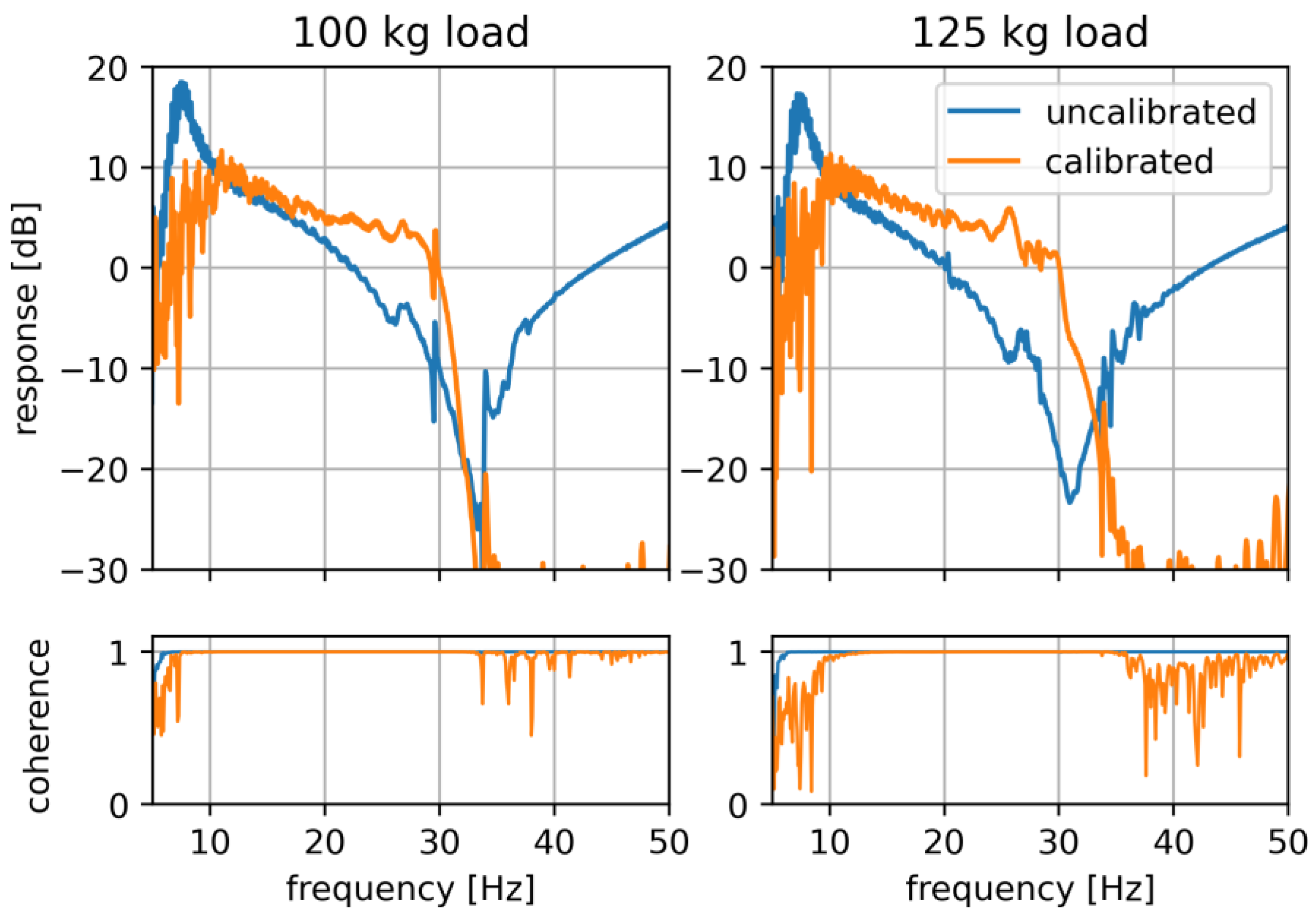
2.3.3. VED Calibration and Operation Monitoring
3. Results
4. Discussion
5. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Piezoelectric | Capacitive | Piezoresistive |
|---|---|---|
| electrical signal is generated via seismic mass pressing on piezoelectric element | based on capacitance change of seismic mass under acceleration, manufactured with MEMS technology | produces resistance changes in strain gages of seismic system, can be manufactured with MEMS technology |
| + high bandwidth | + low cost | + higher bandwidth |
| + wide measuring/dynamic range | + can detect static displacement | + can detect static displacement |
| + high signal-to-noise ratio | + good linearity | + high dynamic range |
| + noise floor independent of bandwidth | + high output stability | + outstanding signal-to-noise ratio |
| + good temperature stability | + can be built in very small case | + can be built in very small case |
| + very robust design | + possibility of doing an active self-test | - sensitive to temperature variation, compensation necessary |
| + many different variations/designs | + easy to implement in wireless designs | - low sensitivity |
| + very good linearity | + no saturation on large impacts | |
| + low sensitivity to magnetic fields | - poor signal-to-noise ratio | |
| - not possible to detect very low frequencies or static displacements | - limited dynamic range | |
| - no active self-test possible | - low bandwidth | |
| - bigger in size | ||
| - saturation on large impacts |
| Charge | Voltage |
|---|---|
| + no power supply necessary (charge accumulated by piezoelectric principle) | + sensitivity independent of cable length and quality |
| + no noise (no circuitry inside of sensor case) | + signal can be transmitted over long cables due to low impendence output |
| + wide dynamic range (>120 dB) | + inexpensive signal conditioners and cables, as no charge amplifiers or low-noise cables are necessary |
| + high operating temperatures (−200 to +640 °C) | + self-test function for IEPE usage |
| + smaller sensors possible (no additional circuit inside of case) | + better for usage in harsher conditions like dirt and humidity |
| + sensitivity can be changed with charge amplifier | - constant power supply necessary |
| - cables as short as possible (<10 m) | - additional noise due to necessary circuitry |
| - requires special shielded low-noise cables (to minimize triboelectric noise) | - operating temperature limited by electronics (<125 °C) |
| - requires charge amplifier | - dynamic range and sensitivity determined using an internal amplifier |
| - sensitivity can be influenced by cable length and quality | - bigger case necessary to fit additional circuitry |
| Analog | Digital |
|---|---|
| + time continuous data | + really cheap sensors available |
| + easier to process | + robust against interference |
| + best suited for audio transmission | + more flexible signal processing with DSPs |
| + data transmission bandwidth equals measurement bandwidth | + possibility to check for erroneous transmission |
| + possibility to use a more accurate ADC | + only (small and cheap) microcontroller necessary for data readout via SPI or I2C protocols, also for multiple sensors |
| - no possibility to detect erroneous transmission | + accuracy only determined with sensor |
| - additional circuitry needed for signal processing | - more complex to process |
| - usually more expensive | - smaller measurement bandwidth for same data transmission bandwidth |
| - more susceptible to noise and interference | - time-sampled data |
| - accuracy and noise performance can be reduced via further circuitry | - SPI and I2C busses are not meant for long cable transmission (only up to a few meters) |
| - more expensive microcontroller necessary for readout for accurate ADC and multiple ADC channels | - number of usable accelerometers limited by data transmissions clock speed |
| - SPI requires a lot of chip-select wires, and I2C requires an address extender chip for a higher number of accelerometers |
References
- Vardaxis, N.G.; Bard, D. Review of acoustic comfort evaluation in dwellings: Part II—Impact sound data associated with subjective responses in laboratory tests. Build. Acoust. 2018, 25, 171–192. [Google Scholar] [CrossRef]
- ISO 10137:2007; Bases for Design of Structures–Serviceability of Buildings and Walkways against Vibrations. International Organization for Standardization: Geneva, Switzerland, 2007.
- Griffin, M.J. Effects of Vibration on People. In Handbook of Noise and Vibration Control, 1st ed.; Crocker, M.J., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar] [CrossRef]
- Chapain, S.; Aly, A.M. Vibration attenuation in a high-rise hybrid-timber building: A comparative study. Appl. Sci. 2023, 13, 2230. [Google Scholar] [CrossRef]
- EN 1995-1-1:2004; Eurocode 5: Design of Timber Structures–Part 1-1: General–Common Rules and Rules for Buildings. European Committee for Standardization: Brussels, Belgium, 2004.
- Park, S.H.; Lee, P.J. Effects of floor impact noise on psychophysiological responses. Build. Environ. 2017, 116, 173–181. [Google Scholar] [CrossRef]
- Bard Hagberg, K. Management of Acoustics in Lightweight Structures. Ph.D. Thesis, Lund University, Lund, Sweden, 2018. [Google Scholar]
- Ljunggren, F.; Simmons, C.; Hagberg, K. Correlation between sound insulation and occupants’ perception–Proposal of alternative single number rating of impact sound. Appl. Acoust. 2014, 85, 57–68. [Google Scholar] [CrossRef]
- Ljunggren, F.; Simmons, C.; Öqvist, R. Correlation between sound insulation and occupants’ perception–Proposal of alternative single number rating of impact sound, part II. Appl. Acoust. 2017, 123, 143–151. [Google Scholar] [CrossRef]
- Frescura, A.; Lee, P.J.; Schöpfer, F.; Schanda, U. Correlation between standardised and real impact sound sources in lightweight wooden structures. Appl. Acoust. 2021, 173, 107691. [Google Scholar] [CrossRef]
- Hongisto, V.; Laukka, J.; Alakoivu, R.; Virtanen, J.; Hakala, J.; Linderholt, A.; Jarnerö, K.; Olsson, J.; Keränen, J. Suitability of standardized single number ratings of impact sound insulation for wooden floors–Psychoacoustic experiment. Build. Environ. 2023, 244, 110727. [Google Scholar] [CrossRef]
- Geluykens, M.; Müllner, H.; Chmelík, V.; Rychtarikova, M. Airborne sound insulation and noise annoyance: Implications of listening test methodology. In Proceedings of the Forum Acusticum, Torino, Italy, 11–15 September 2023. [Google Scholar]
- TE Connectivity Ltd. Choosing the Right Type of Accelerometer. Available online: https://www.te.com/usa-en/products/sensors/vibration-sensors/intersection/types-of-accelerometers.html (accessed on 9 November 2023).
- Murphy, C. Why MEMS Accelerometers Are Becoming the Designer’s Best Choice for CbM Applications. Available online: https://www.analog.com/en/technical-articles/why-memes-acceler-are-best-choice-for-cbm-apps.html (accessed on 9 November 2023).
- Weber, M. Characteristics. Available online: https://mmf.de/en/piezoelectric-principle-4 (accessed on 2 January 2024).
- Weber, M. IEPE Standard. Available online: https://mmf.de/en/iepe-standard (accessed on 2 January 2024).
- TE Connectivity Ltd. Sieben Aspekte der Gegenüberstellung Von “Digital” und “Analog”. Available online: https://www.te.com/de/industries/sensor-solutions/insights/digital-over-analog.html (accessed on 9 November 2023).
- MPS. Analog Signals vs. Digital Signals. Available online: https://www.monolithicpower.com/en/analog-vs-digital-signal (accessed on 9 November 2023).
- Prislan, R. The design of an impact sound vibration exposure device. In Proceedings of the Forum Acusticum, Torino, Italy, 11–15 November 2023. [Google Scholar]
- Hopkins, C. Sound Insulation, 1st ed.; Elsevier Ltd.: Oxford, UK, 2007. [Google Scholar]
- ISO 10848-1:2017; Acoustics–Laboratory and Field Measurement of Flanking Transmission for Airborne, Impact and Building Service Equipment Sound between Adjoining Rooms–Part 1: Frame Document. International Organization for Standardization: Geneva, Switzerland, 2017.
- Watters, B.G. Impact noise Characteristics of Female Hard-Heeled Foot Traffic. J. Acoust. Soc. Am. 1965, 37, 619–630. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; Jonkers, I.; De Roeck, G.; Van den Broeck, P. Chararacterisation of walking loads by 3D inertial motion tracking. J. Sound. Vib. 2014, 20, 5212–5226. [Google Scholar] [CrossRef]
- Miwa, T. Evaluation methods for vibration effect. Ind. Health 1967, 5, 11–17. [Google Scholar] [CrossRef]
- Woods, A.G. Human response to low frequency sinusoidal and random vibration: A description of a series of tests made with a vibration simulator to evaluate the effect of vibration on task performance. Airc. Eng. Aerosp. TEC. 1967, 39, 6–14. [Google Scholar] [CrossRef]
- Meister, A.; Bräuer, D.; Kurerov, N.N.; Metz, A.M.; Mucke, R.; Rothe, R.; Seidel, H.; Starozuki, I.A.; Uvorov, G.A. Evaluation of responses to broad-band whole-body vibration. Ergonomics 1984, 27, 959–980. [Google Scholar] [CrossRef] [PubMed]
- Proaksis, J.G.; Manolakis, D.K. Digital Signal Processing; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- University of Exeter. VSimulators. Available online: https://vsimulators.co.uk (accessed on 3 January 2023).
- Bellmann, M.A. Perception of Whole-Body Vibrations: From Basic Experiments to Effects of Seat and Steering-Wheel Vibrations on the Passenger’s Comfort Inside Vehicles. Ph.D. Dissertation, Shaker Verlag, Aachen, Germany, 2002. [Google Scholar]
- Bellmann, M.A.; Mellert, V.; Remmers, H.; Weber, W. Influence of Frequency and Magnitude on the Perception of Vertical Whole-Body Vibration. Joint Congress CFA/DAGA’04 (2004), Strasbourg, March 22–25. Available online: http://www.conforg.fr/cfadaga2004/cdrom/data/procs/articles/000510.pdf (accessed on 13 June 2014).









| Accelerometer | Mass in g | Cable | RC 1 | HB 1 | CLT 1 | GPB 1 |
|---|---|---|---|---|---|---|
| Bruel and Kjaer 4553-B | 8 | excluded | ||||
| 21 | included | >5 kHz | >5 kHz | >5 kHz | >5 kHz | |
| VSU with XLR | 25 | excluded | ||||
| 67 | included | >5 kHz | <4.85 kHz | <2.70 kHz | <3.83 kHz | |
| VSU with mini XLR | 24 | excluded | ||||
| 32 | included | >5 kHz | >5 kHz | >5 kHz | >5 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dolezal, F.; Reichenauer, A.; Wilfling, A.; Neusser, M.; Prislan, R. Recording, Processing, and Reproduction of Vibrations Produced by Impact Noise Sources in Buildings. Acoustics 2024, 6, 97-113. https://doi.org/10.3390/acoustics6010006
Dolezal F, Reichenauer A, Wilfling A, Neusser M, Prislan R. Recording, Processing, and Reproduction of Vibrations Produced by Impact Noise Sources in Buildings. Acoustics. 2024; 6(1):97-113. https://doi.org/10.3390/acoustics6010006
Chicago/Turabian StyleDolezal, Franz, Andreas Reichenauer, Armin Wilfling, Maximilian Neusser, and Rok Prislan. 2024. "Recording, Processing, and Reproduction of Vibrations Produced by Impact Noise Sources in Buildings" Acoustics 6, no. 1: 97-113. https://doi.org/10.3390/acoustics6010006