
Experimental Prediction Method of Free-Field Sound Emissions Using the Boundary Element Method and Laser Scanning Vibrometry
 , , , , , and
, , , , , and
Abstract
:1. Introduction
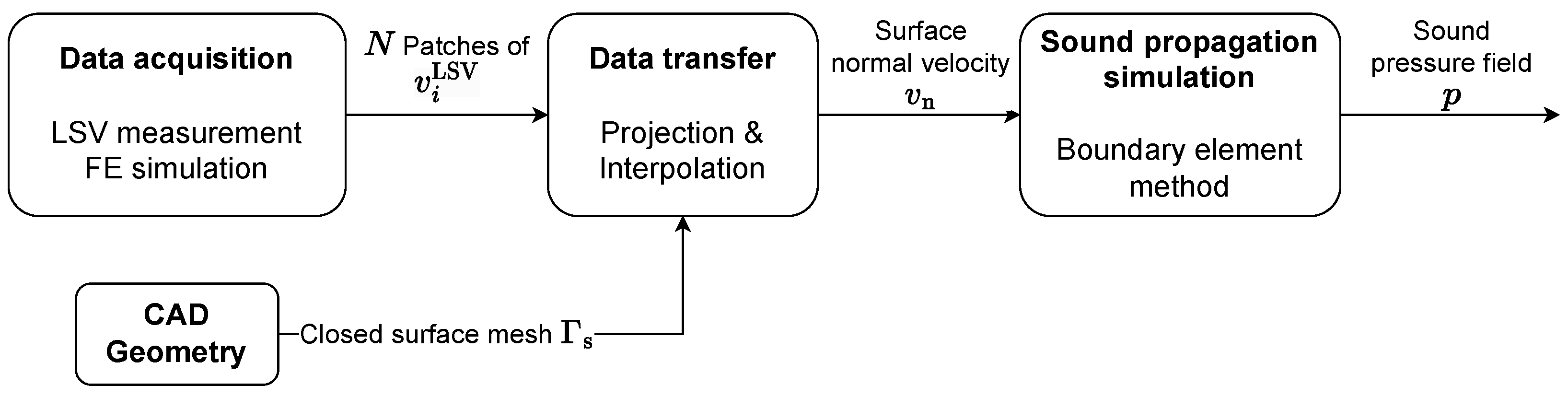
2. Methods
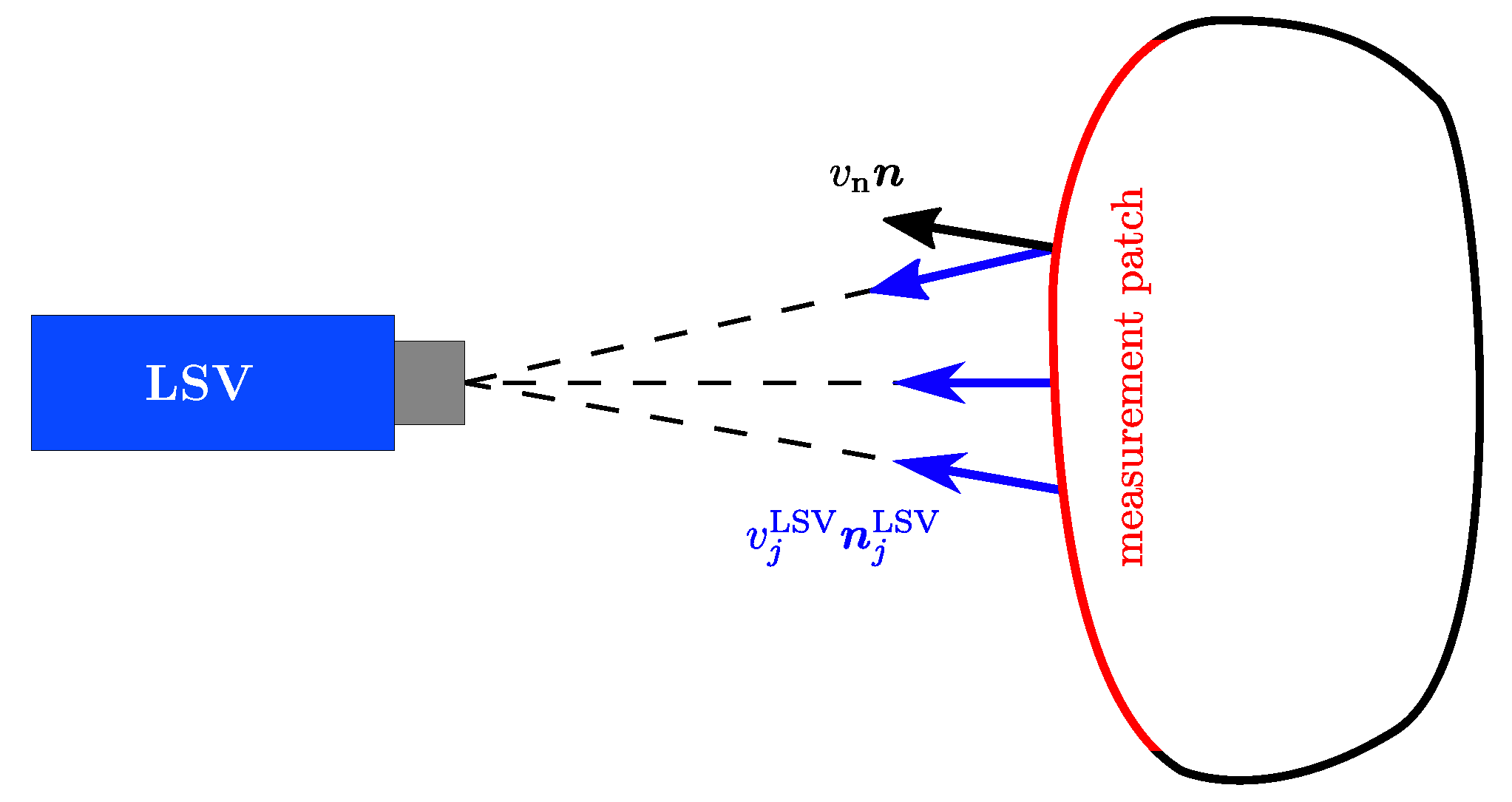
2.1. Data Acquisition
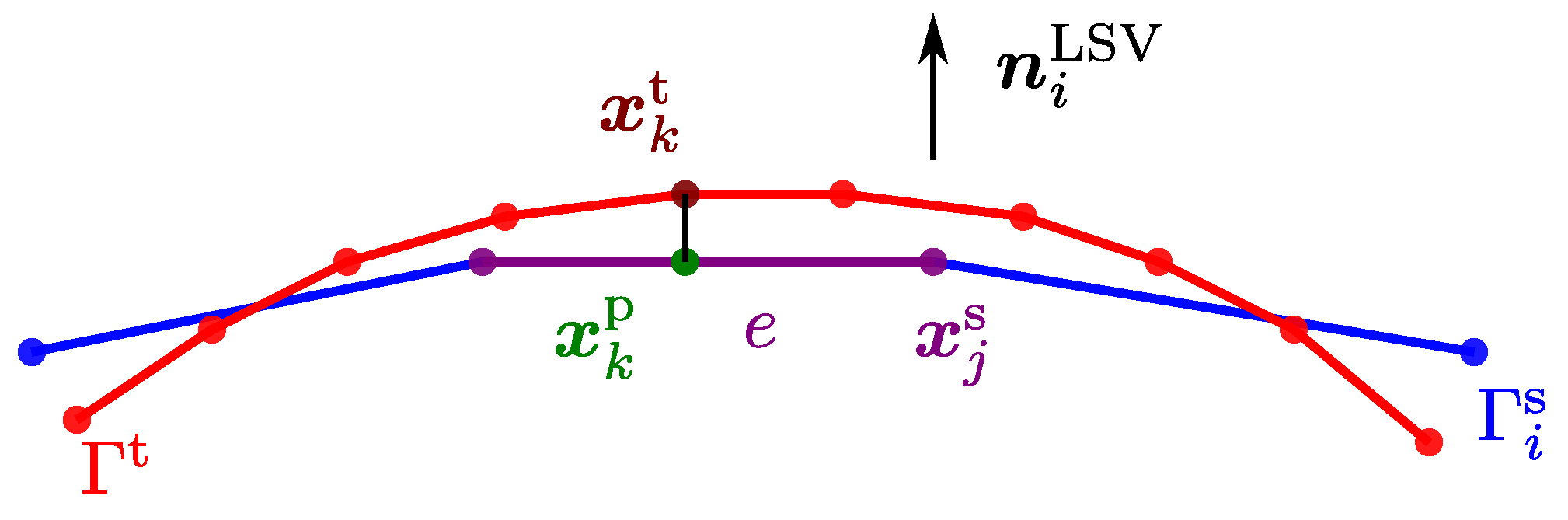
- Imperfect representation of the geometry by the measured surface patch;
- Spatial up-sampling of coarsely distributed measurement data;
- Overlapping data patches.
| Algorithm 1 Data transformation matrix |
▹ Compute projection direction for do ▹ Loop over nodes in target grid for do ▹ Loop over nodes / elements in source grid if then ▹ Skip points that are too far apart ▹ Project point onto source grid if then ▹ Check if projected point is inside the element ▹ Compute interpolation weights end if end if end for end for |
2.2. Boundary Element Method
2.3. Discrete Formulation in the Software NiHu
3. Verification and Validation
3.1. Verification of the BEM Solver
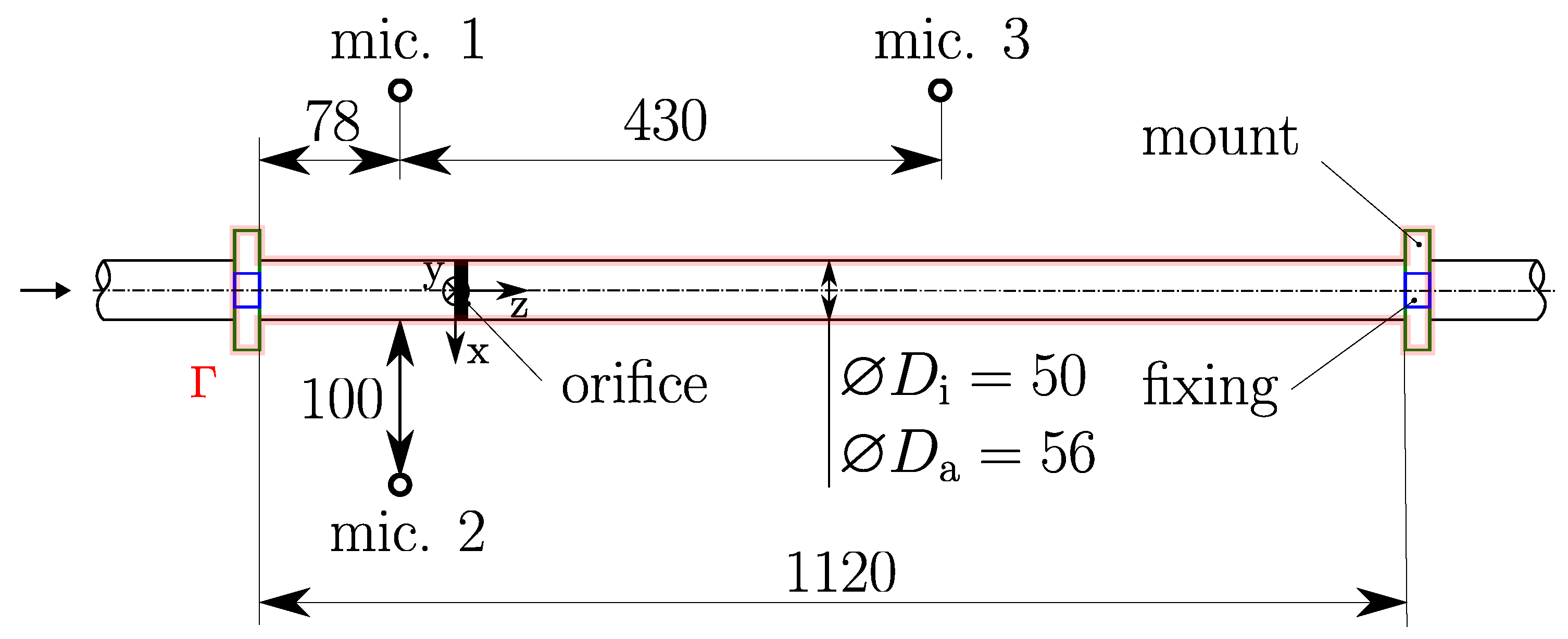
3.2. Validation Example: Pipe with Orifice
3.2.1. Measurements and FEM Model
3.2.2. BEM Simulation Model
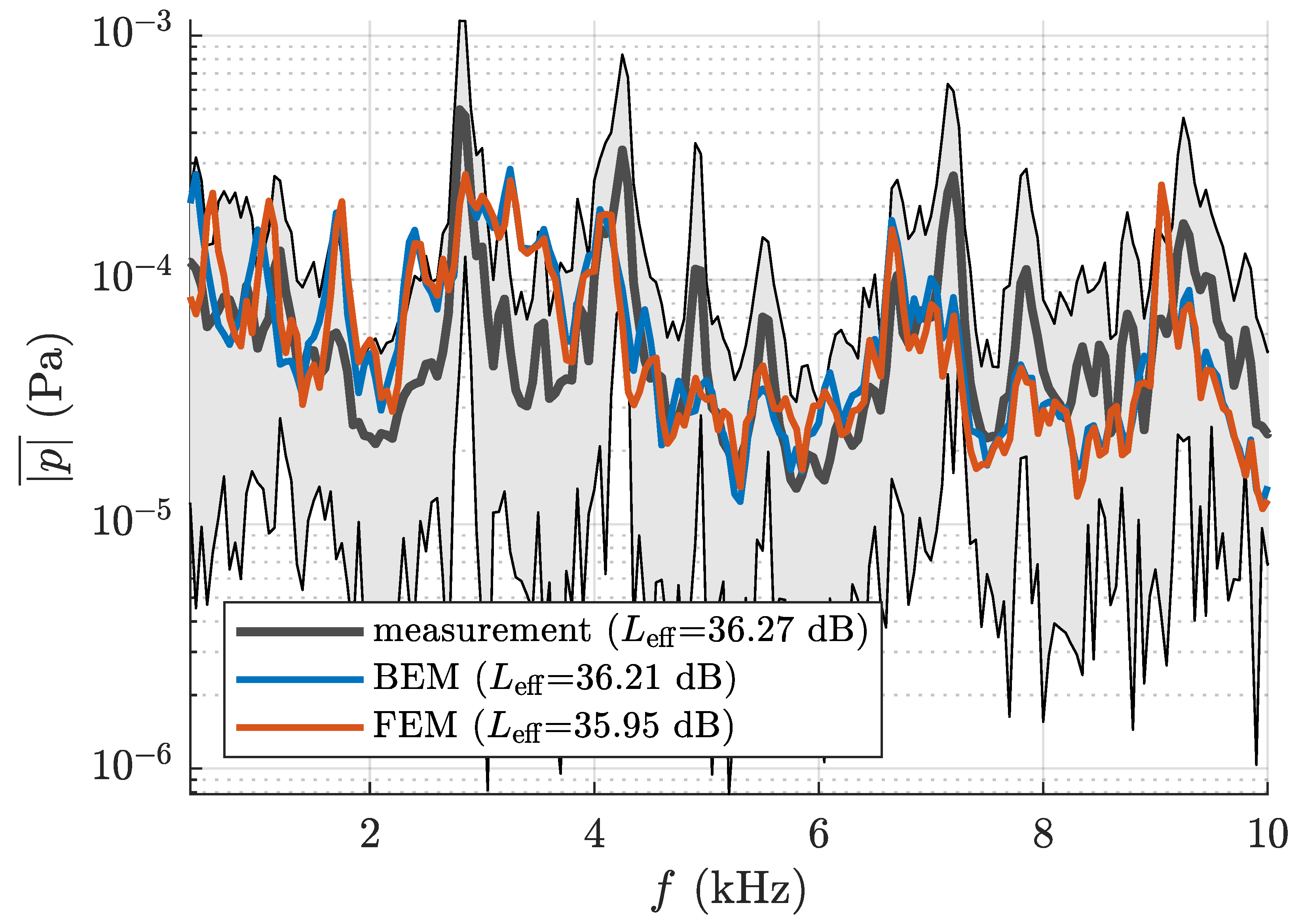
3.2.3. Comparison of Experimental and Numerical Results
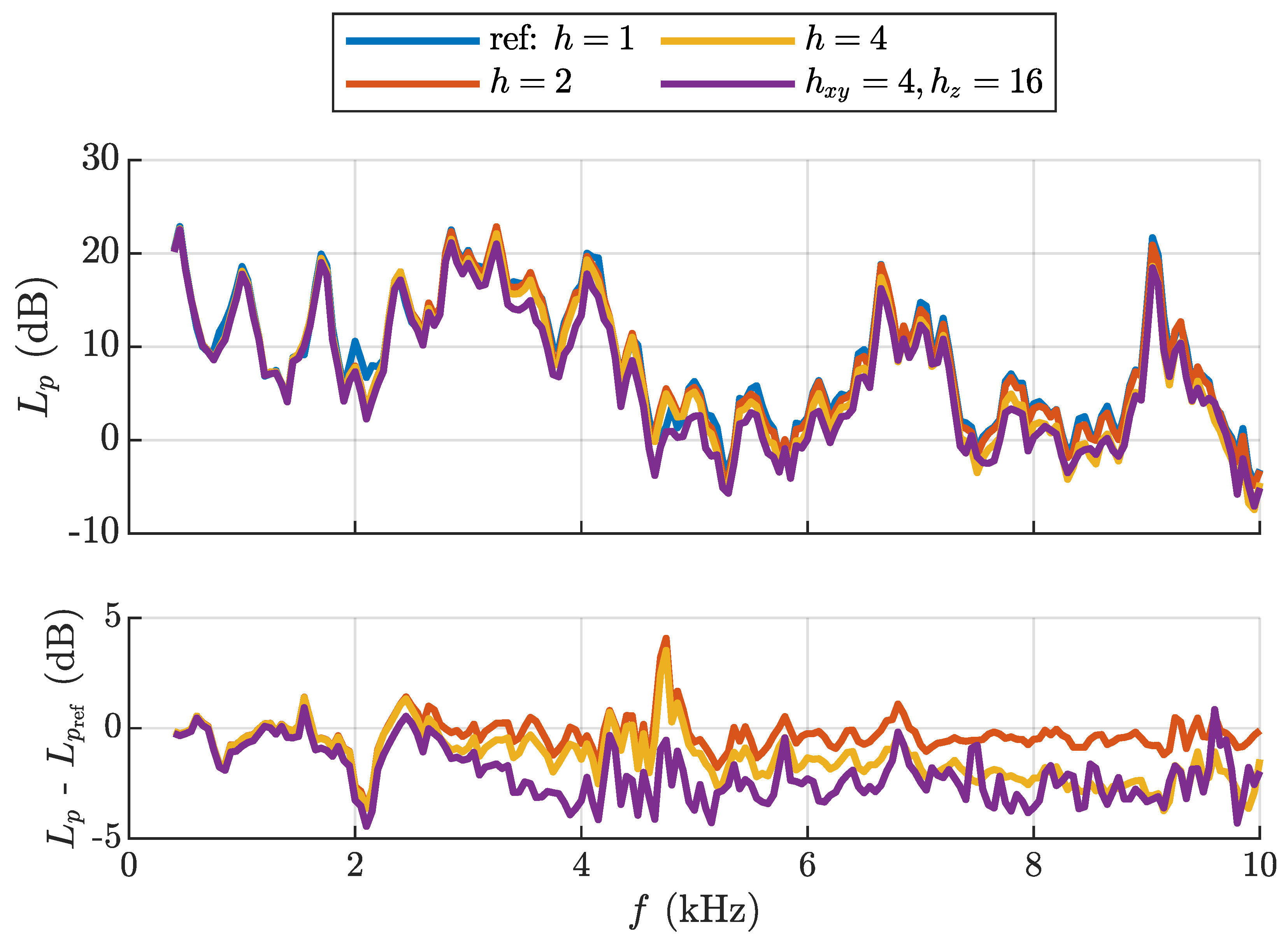
3.2.4. Variation of Measurement Point Density
4. Application: Prosthesis Frame
4.1. Measurement Setup
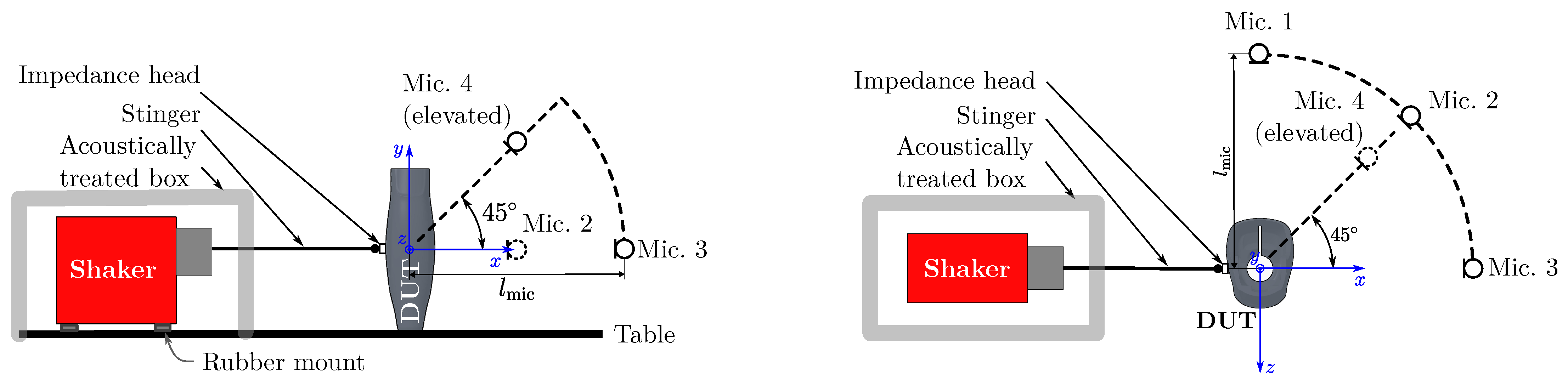
4.1.1. Acoustic Pressure Measurements
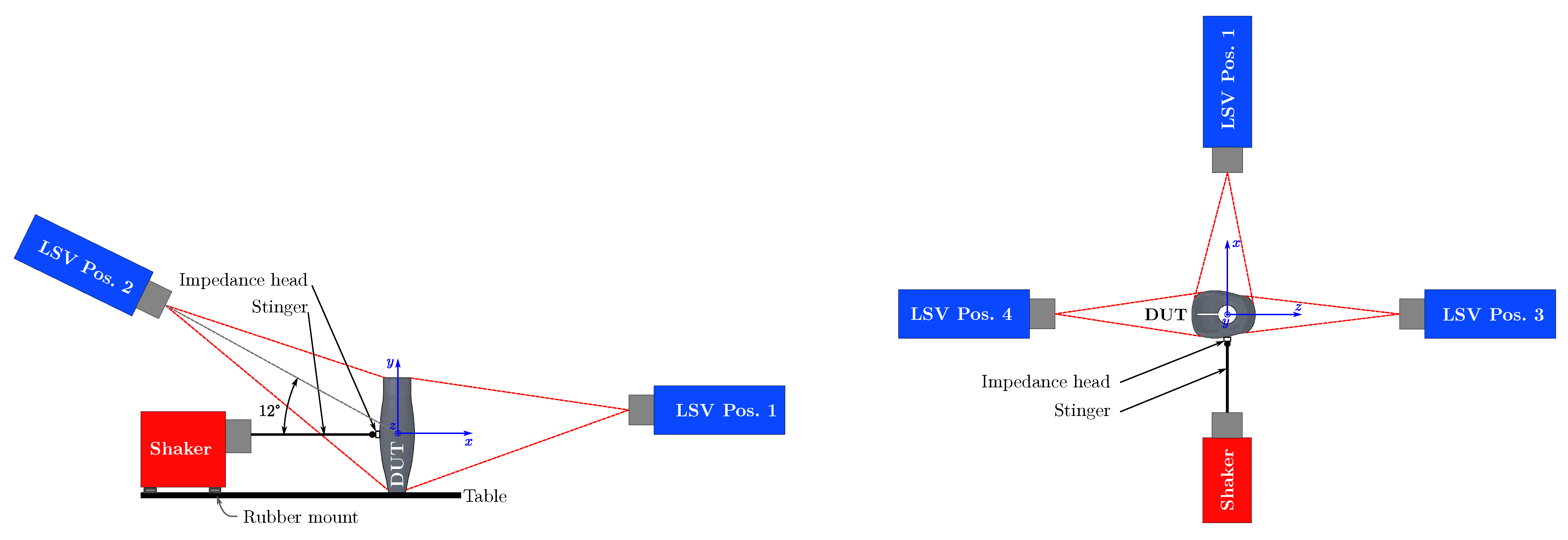
4.1.2. Surface Velocity Measurements Using LSV
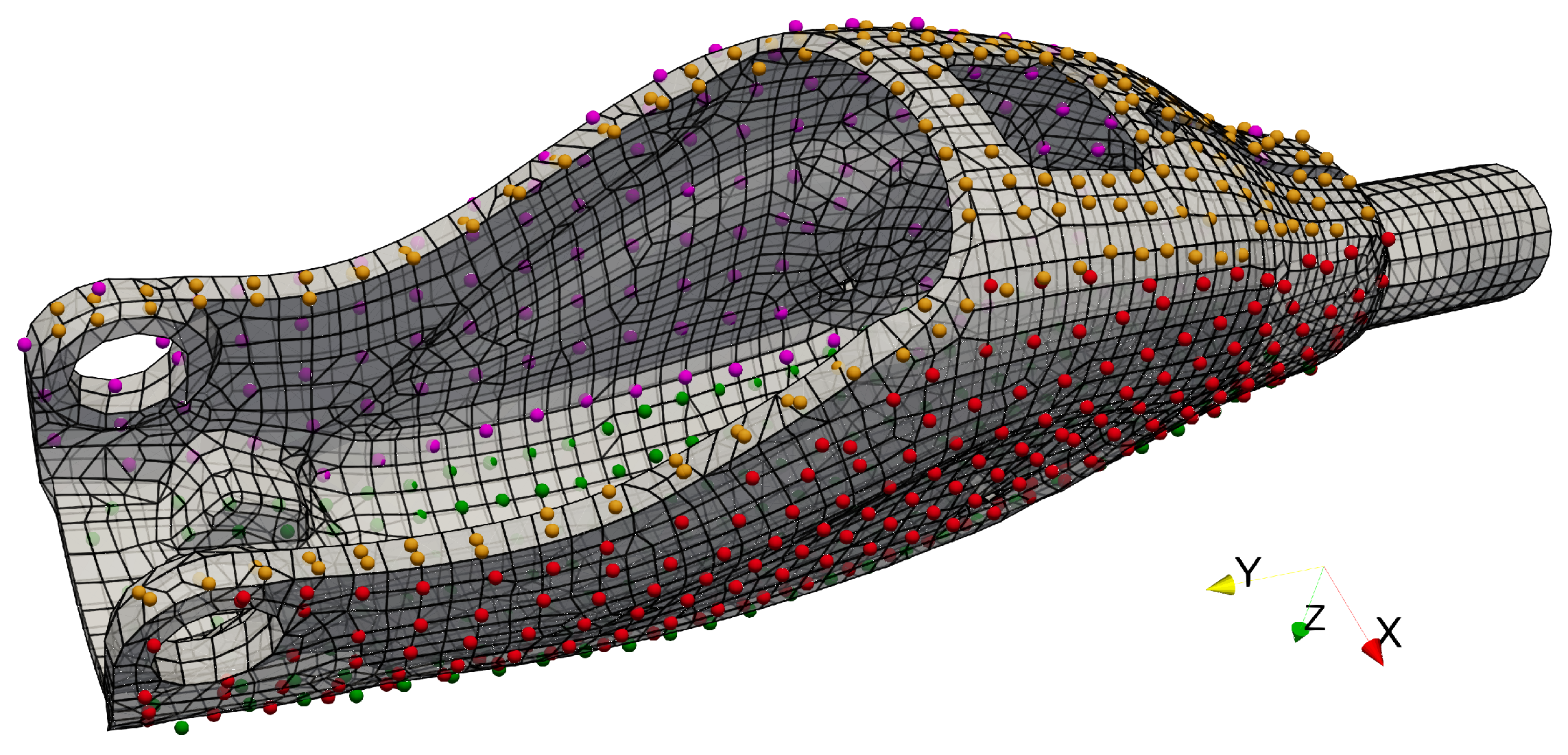
4.2. BEM Simulation Model
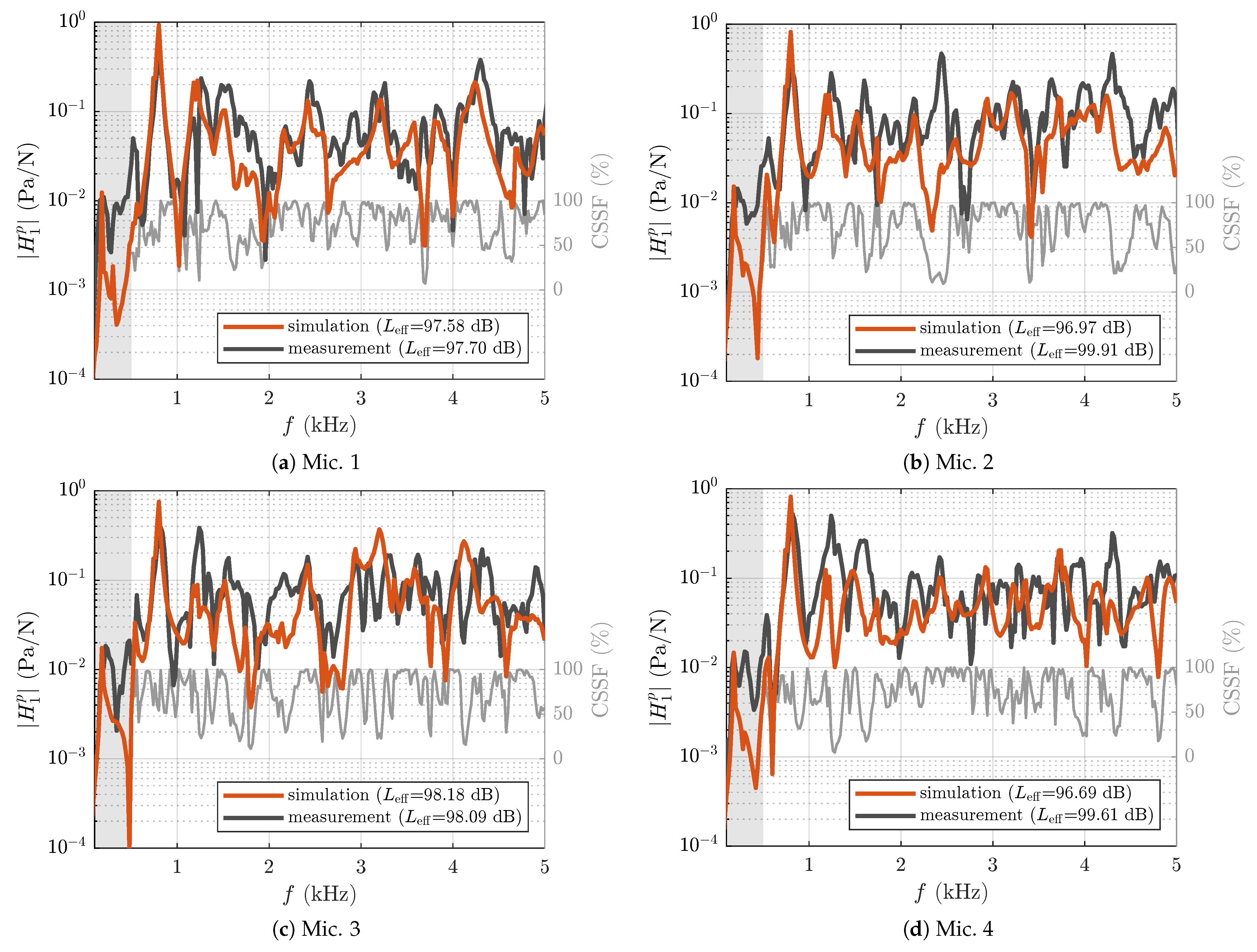
4.3. Comparison of Measurement and Simulation
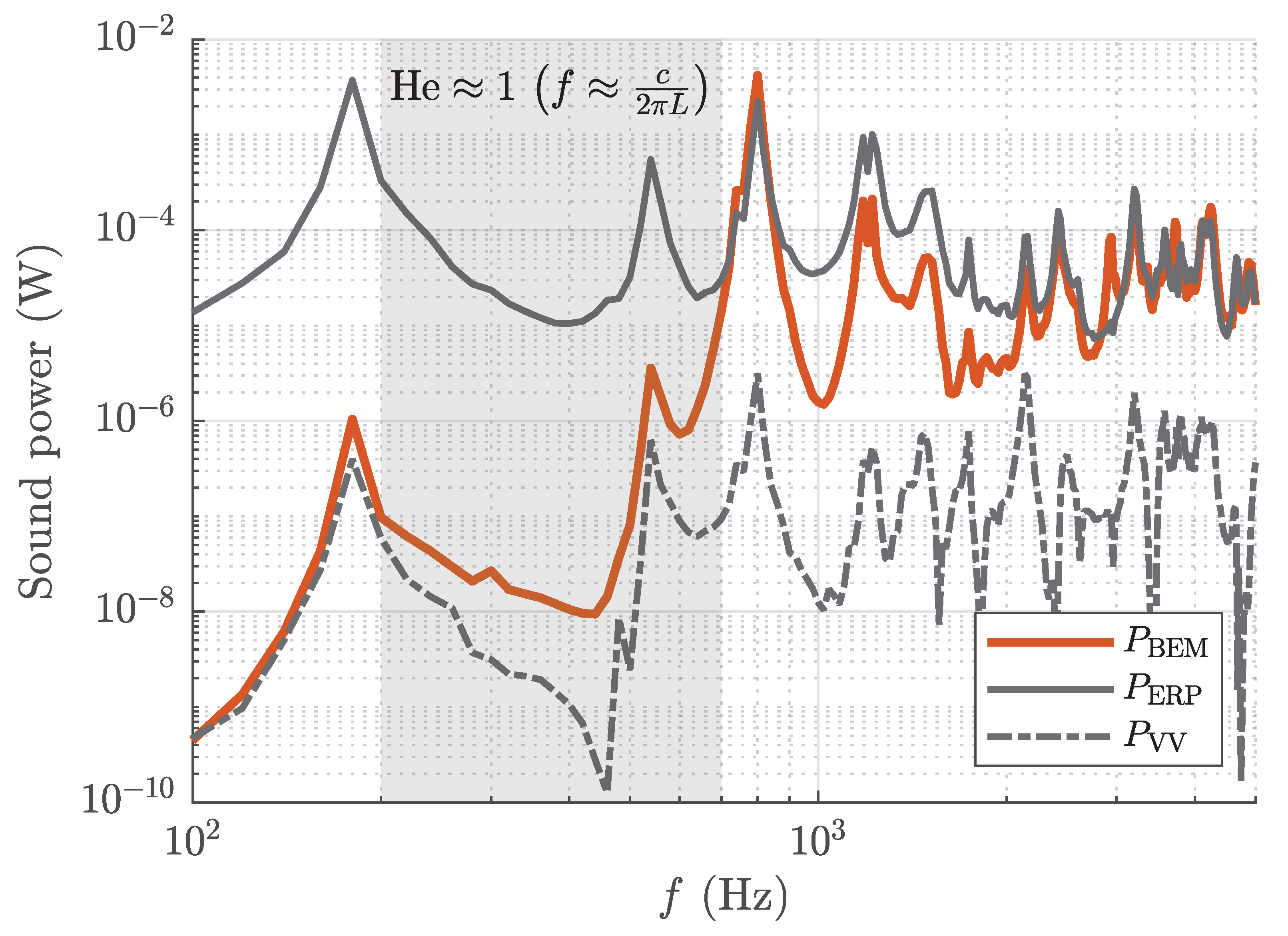
4.4. Radiated Sound Power
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BEM | Boundary element method |
| CAD | Computer-aided design |
| DUT | Device under test |
| ERP | Equivalent radiated power |
| FEM | Finite element method |
| HBIE | Hypersingular boundary integral equation |
| LSV | Laser scanning vibrometry/vibrometer |
| SPL | Sound pressure level |
References
- Christensen, R. Acoustic Modeling of Hearing Aid Components. Ph.D. Thesis, Syddansk Universitet, Odense, Denmark, 2010. [Google Scholar]
- Candy, J. Accurate calculation of radiation and diffraction from loudspeaker enclosures at low frequency. J. Audio Eng. Soc. 2013, 61, 356–365. [Google Scholar]
- Nuraini, A.; Mohd Ihsan, A.; Nor, M.; Jamaluddin, N. Vibro-acoustic analysis of free piston engine structure using finite element and boundary element methods. J. Mech. Sci. Technol. 2012, 26, 2405–2411. [Google Scholar] [CrossRef]
- Panda, K.C. Dealing with noise and vibration in automotive industry. Procedia Eng. 2016, 144, 1167–1174. [Google Scholar] [CrossRef]
- Oberst, S.; Lai, J.; Marburg, S. Guidelines for numerical vibration and acoustic analysis of disc brake squeal using simple models of brake systems. J. Sound Vib. 2013, 332, 2284–2299. [Google Scholar] [CrossRef]
- Bates, T.P.; Bacon, I.C.; Blotter, J.D.; Sommerfeldt, S.D. Vibration-based sound power measurements of arbitrarily curved panels. J. Acoust. Soc. Am. 2022, 151, 1171–1179. [Google Scholar] [CrossRef] [PubMed]
- Yeh, F.; Chang, X.; Sung, Y. Numerical and Experimental Study on Vibration and Noise of Embedded Rail System. J. Appl. Math. Phys. 2017, 5, 1629. [Google Scholar] [CrossRef]
- Vlahopoulos, N.; Vallance, C.; Stark, R.D., III. Numerical approach for computing noise-induced vibration from launch environments. J. Spacecr. Rocket. 1998, 35, 355–360. [Google Scholar] [CrossRef]
- Rossignol, K.S.; Lummer, M.; Delfs, J. Validation of DLR’s sound shielding prediction tool using a novel sound source. In Proceedings of the 15th AIAA/CEAS Aeroacoustics Conference (30th AIAA Aeroacoustics Conference), Miami, FL, USA, 11–13 May 2009; p. 3329. [Google Scholar] [CrossRef]
- Lummer, M.; Akkermans, R.A.; Richter, C.; Pröber, C.; Delfs, J. Validation of a model for open rotor noise predictions and calculation of shielding effects using a fast BEM. In Proceedings of the 19th AIAA/CEAS Aeroacoustics Conference, Berlin, Germany, 27–29 May 2013; p. 2096. [Google Scholar] [CrossRef]
- Kumar, S.; Forster, H.M.; Bailey, P.; Griffiths, T.D. Mapping unpleasantness of sounds to their auditory representation. J. Acoust. Soc. Am. 2008, 124, 3810–3817. [Google Scholar] [CrossRef]
- Preuss, S.; Gurbuz, C.; Jelich, C.; Baydoun, S.K.; Marburg, S. Recent advances in acoustic boundary element methods. J. Theor. Comput. Acoust. 2022, 30, 2240002. [Google Scholar] [CrossRef]
- Fritze, D.; Marburg, S.; Hardtke, H.J. FEM–BEM-coupling and structural–acoustic sensitivity analysis for shell geometries. Comput. Struct. 2005, 83, 143–154. [Google Scholar] [CrossRef]
- Kirkup, S. The boundary element method in acoustics: A survey. Appl. Sci. 2019, 9, 1642. [Google Scholar] [CrossRef]
- Li, Y.; Meyer, J.; Lokki, T.; Cuenca, J.; Atak, O.; Desmet, W. Benchmarking of finite-difference time-domain method and fast multipole boundary element method for room acoustics. Appl. Acoust. 2022, 191, 108662. [Google Scholar] [CrossRef]
- Chen, L.; Lian, H.; Natarajan, S.; Zhao, W.; Chen, X.; Bordas, S. Multi-frequency acoustic topology optimization of sound-absorption materials with isogeometric boundary element methods accelerated by frequency-decoupling and model order reduction techniques. Comput. Methods Appl. Mech. Eng. 2022, 395, 114997. [Google Scholar] [CrossRef]
- Deckers, E.; Atak, O.; Coox, L.; D’Amico, R.; Devriendt, H.; Jonckheere, S.; Koo, K.; Pluymers, B.; Vandepitte, D.; Desmet, W. The wave based method: An overview of 15 years of research. Wave Motion 2014, 51, 550–565. [Google Scholar] [CrossRef]
- Schoder, S.; Roppert, K. openCFS-Data: Data Pre-Post-Processing Tool for openCFS–Aeroacoustics Source Filters. arXiv 2023, arXiv:2302.03637. [Google Scholar] [CrossRef]
- Marburg, S. Boundary Element Method for Time-Harmonic Acoustic Problems. In Computational Acoustics; Kaltenbacher, M., Ed.; Springer International Publishing: Cham, Switzerland, 2018; pp. 69–158. [Google Scholar] [CrossRef]
- Fiala, P.; Rucz, P. NiHu: An open source C++ BEM library. Adv. Eng. Softw. 2014, 75, 101–112. [Google Scholar] [CrossRef]
- Maurerlehner, P.; Schoder, S.; Tieber, J.; Freidhager, C.; Steiner, H.; Brenn, G.; Schäfer, K.H.; Ennemoser, A.; Kaltenbacher, M. Aeroacoustic formulations for confined flows based on incompressible flow data. Acta Acust. 2022, 6, 45. [Google Scholar] [CrossRef]
- Fritze, D.; Marburg, S.; Hardtke, H.J. Estimation of radiated sound power: A case study on common approximation methods. Acta Acust. United Acust. 2009, 95, 833–842. [Google Scholar] [CrossRef]
- Rothberg, S.; Allen, M.; Castellini, P.; Di Maio, D.; Dirckx, J.; Ewins, D.; Halkon, B.; Muyshondt, P.; Paone, N.; Ryan, T.; et al. An international review of laser Doppler vibrometry: Making light work of vibration measurement. Opt. Lasers Eng. 2017, 99, 11–22. [Google Scholar] [CrossRef]
- Burton, A.J.; Miller, G.F. The application of integral equation methods to the numerical solution of some exterior boundary-value problems. Proc. R. Soc. Lond. 1971, 323, 201–210. [Google Scholar] [CrossRef]
- Marburg, S. The Burton and Miller Method: Unlocking Another Mystery of Its Coupling Parameter. J. Comput. Acoust. 2016, 24, 1550016. [Google Scholar] [CrossRef]
- Fiala, P.; Rucz, P. NiHu: A multi-purpose open source fast multipole solver. In Proceedings of the DAGA 2019. German Acoustical Society (DEGA), Rostock, Germany, 18–21 March 2019; pp. 1262–1265. [Google Scholar]
- Schenck, H.A. Improved Integral Formulation for Acoustic Radiation Problems. J. Acoust. Soc. Am. 1968, 44, 41–58. [Google Scholar] [CrossRef]
- Maurerlehner, P. Aero- and Vibroacoustics of Confined Flows. Ph.D. Thesis, TU Graz, Graz, Austria, 2023. [Google Scholar]
- Mathworks. Matlab documentation: (). 2023. Available online: https://de.mathworks.com/help/signal/ref/stft.html (accessed on 11 October 2023).
- Avitabile, P. Modal Testing: A Practitioner’s Guide; John Wiley & Sons Ltd: Chichester, UK, 2017. [Google Scholar] [CrossRef]
- Neumann, M.N.; Hennings, B.; Lammering, R. Identification and Avoidance of Systematic Measurement Errors in Lamb Wave Observation With One-Dimensional Scanning Laser Vibrometry. Strain 2013, 49, 95–101. [Google Scholar] [CrossRef]
- Dascotte, E.; Strobbe, J. Updating finite element models using FRF correlation functions. In Proceedings of the 17th International Modal Analysis Conference, Kissimmee, FL, USA, 8–11 February 1999; pp. 1169–1174. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microphone Position | ||||
|---|---|---|---|---|
| 1 | dB | dB | dB | dB |
| 2 | dB | dB | dB | dB |
| 3 | dB | dB | dB | dB |
| Microphone Position | |||
|---|---|---|---|
| 1 | dB | dB | dB |
| 2 | dB | dB | dB |
| 3 | dB | dB | dB |
| 4 | dB | dB | dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wurzinger, A.; Kraxberger, F.; Maurerlehner, P.; Mayr-Mittermüller, B.; Rucz, P.; Sima, H.; Kaltenbacher, M.; Schoder, S. Experimental Prediction Method of Free-Field Sound Emissions Using the Boundary Element Method and Laser Scanning Vibrometry. Acoustics 2024, 6, 65-82. https://doi.org/10.3390/acoustics6010004
Wurzinger A, Kraxberger F, Maurerlehner P, Mayr-Mittermüller B, Rucz P, Sima H, Kaltenbacher M, Schoder S. Experimental Prediction Method of Free-Field Sound Emissions Using the Boundary Element Method and Laser Scanning Vibrometry. Acoustics. 2024; 6(1):65-82. https://doi.org/10.3390/acoustics6010004
Chicago/Turabian StyleWurzinger, Andreas, Florian Kraxberger, Paul Maurerlehner, Bernhard Mayr-Mittermüller, Peter Rucz, Harald Sima, Manfred Kaltenbacher, and Stefan Schoder. 2024. "Experimental Prediction Method of Free-Field Sound Emissions Using the Boundary Element Method and Laser Scanning Vibrometry" Acoustics 6, no. 1: 65-82. https://doi.org/10.3390/acoustics6010004