1. Introduction
It is natural to expect more accurate forecasts of time-averaged quantities. For instance, one would expect that the rainfall averaged over one week can be forecast with greater skill than the rainfall averaged over one day. Likewise, one would expect that the rainfall averaged over a large region (such as the area of a state or province) could be predicted with greater skill than the rainfall over a smaller region (such as a city or town). This conventional wisdom has a long history; for instance, Roads [
1] writes, “When meteorologists are asked to make a forecast for a month, a season, or even a couple of weeks in advance, they usually quote from numerous predictability studies that it is probably impossible to forecast instantaneous deviations from climatology this far into the future. They might also point out that skillful instantaneous forecasts are rarely issued by weather services beyond a few days in advance. On the other hand, they might suggest that it is possible to give a broad overview of the upcoming weather by considering the time-averaged behavior”.
The quote above is from 35 years ago, and it is important to note that, since then, forecasting methods have undergone substantial changes. For instance, advances in data assimilation methods have provided initial conditions that are more accurate, and the models themselves are improved and used with higher resolution, e.g., [
2]. If the initial condition or forecast is highly uncertain, then the quote above seems to agree with basic intuition: an instantaneous forecast may not be very accurate, but its time-averaged behavior may be more skillful. On the other hand, with a more accurate initial condition or forecast, an instantaneous forecast could have substantially greater skill. Consequently, these advances in forecast methods raise the question: how much improvement in predictability or forecast performance is gained via time averaging, in a modern forecasting setting?
Some past work, including some relatively modern work, has examined forecast skill for different spatial or temporal averaging, e.g., [
1,
3,
4], although the studies were not set up in a way that allows direct assessment of the conventional wisdom described in the paragraphs above. Other recent work, on the other hand, has been set up to allow a direct assessment [
5,
6]. Given that different setups have been used in different studies in investigating spatial and temporal averaging, it is worthwhile to take the following paragraphs to clarify some important aspects of the setup.
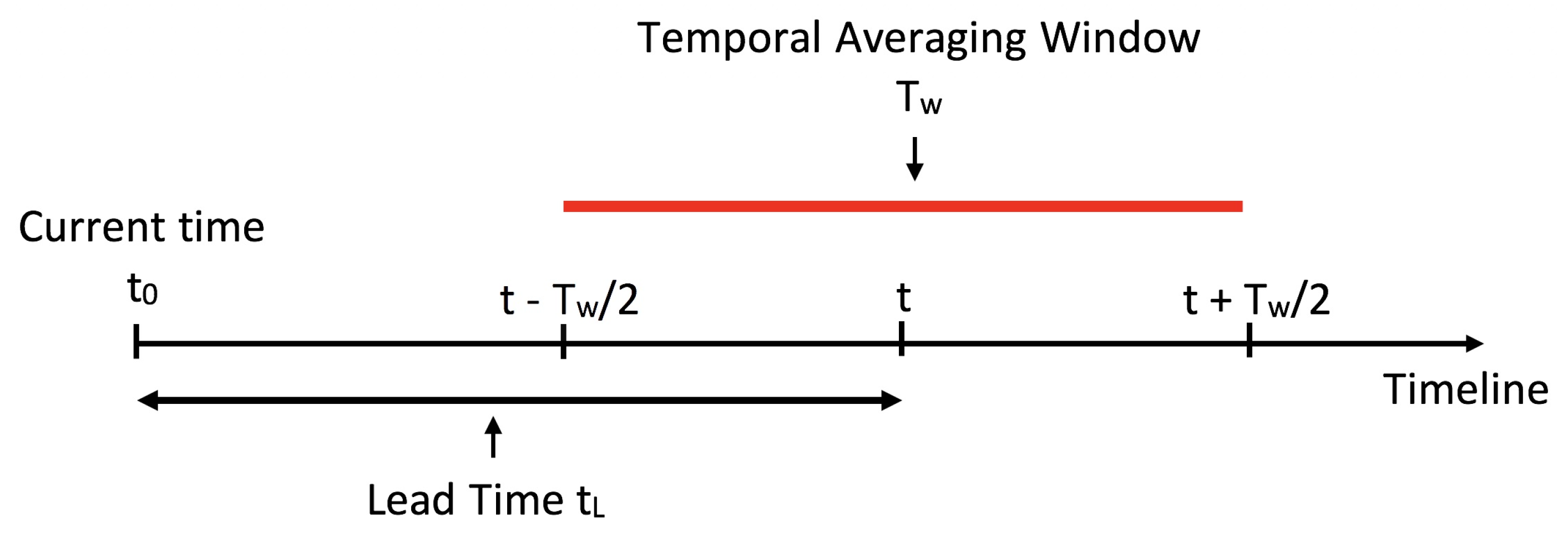
In particular, to most clearly assess the conventional wisdom described in the paragraphs above, it is necessary to compare forecasts in a way that holds all parameters fixed (lead time, etc.) except for changes in the averaging window. Furthermore, the time-averaging window should extend in both directions around the target date, as illustrated in
Figure 1 (and discussed further in
Section 2). If the target date is time
t, then a time average should be performed from
to
, where
is the duration of the time-averaging window. If other conventions are used, they could introduce a bias into the comparison. For instance, if the time average is performed from
t to
, then the forecast skill will decrease as
increases, since the forecast is performed further into the future. On the other hand, a time average in the other direction, from
to
t, is commonly used in numerical weather prediction (NWP) to define an accumulation. However, if the time average is performed from
to
t, then the forecast skill will increase as
increases, since the forecast is performed closer to the current time. To remove these biases and isolate the effects that are due to only the time-averaging window duration
, a time average should be performed over a “centered” window from
to
. Such an assessment is the goal of the present paper.
A few recent studies have provided assessments of averaging that use the “centered” window in
Figure 1 [
5,
6], and their setups have some similarities and some differences in comparison to the present study. Buizza and Leutbecher [
5] use the centered (or midpoint) definition of the time-averaging window, as in
Figure 1 here, and they analyze data at all locations globally, but they define spatial smoothing in a different way (i.e., using spectral truncations), and they do not analyze precipitation. van Straaten et al. [
6] also use the centered (or midpoint) definition of the time-averaging window, and they use a spatial aggregation method based on dissimilarity and hierarchical clustering. They analyzed near-surface temperature (specifically, 2-m temperature) but not precipitation. They also analyzed data over Europe, whereas the present study is global.
Besides using operational weather forecasts, one could also investigate the effects of time- and space-averaging in other dynamical systems. In some early work, simple stochastic models have been used, and their statistics have been analyzed after time averaging [
7,
8,
9,
10]. While these early studies provide valuable information about the statistics of time-averaged processes, they do not provide a direct assessment of time-averaging effects on forecasts as described above and in
Figure 1. In more recent work, Li and Stechmann [
11] made a direct assessment, as in
Figure 1. For simple stochastic dynamical systems, it was seen that spatial averaging did improve forecast performance, whereas time averaging was somewhat limited at improving forecast performance, under the perspective of the simple stochastic setting.
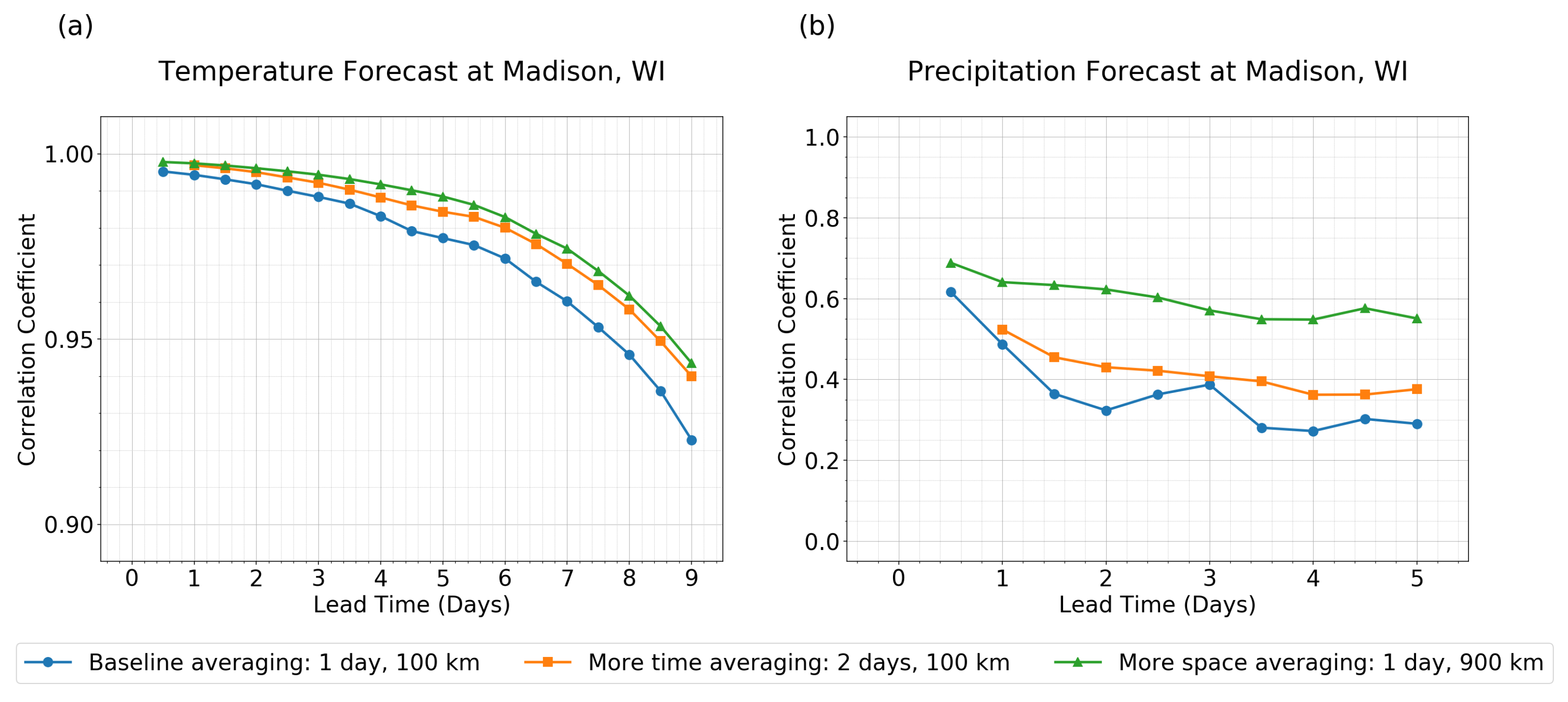
As a preliminary look at numerical weather prediction data,
Figure 2 shows the effects of space- and time-averaging at one location—our home city of Madison, Wisconsin. While the methodology will be described in more detail below, and while results may differ for different geographic locations,
Figure 2 offers a first glimpse of the results.
Substantial differences can be seen in
Figure 2 for the effects of averaging. A baseline case is shown in each panel to indicate a somewhat minimal amount of averaging, with a 1-day time-average to average over the diurnal cycle, and with a 100-km spatial average that represents the resolution of the data from the numerical forecast model. Two additional curves are also shown in each panel: one curve for forecasts of longer time averages of duration 2 days, and one curve for forecasts of a larger spatial region of diameter 900 km.
In all cases, the additional averaging leads to an enhanced forecast performance. However, for temperature, the time- and space-averaging have similar impacts, whereas for precipitation the time- and space-averaging have substantially different impacts: the spatial averaging causes a much greater improvement in forecast performance. This is one illustration of how the effects of time- and space-averaging can differ greatly in different scenarios. The purpose of the present paper is to investigate these effects systematically and in greater detail, and to consider whether differences arise due to other factors, such as land versus ocean, tropics versus extratropics, etc.
The effects of time- and space-averaging could be investigated in a number of different settings. Here, lead times of 0 to 9 days are investigated. This is the setting of the classic weather forecasting problem, which is perhaps the simplest setting for investigating the effects of averaging, as it is a relatively simpler setting of an initial value problem and for which there is a longer history of investigations, whereas longer lead times introduce further complications in uncertainties and interpretation and are a more recent endeavor. (It would be interesting in the future to carry out a similar study at longer lead times such as subseasonal-to-seasonal prediction.) The data for these shorter lead times (0 to 9 days) are available at higher spatial resolution than the data for extended-range and long-range forecasts, and higher resolution will facilitate the study of spatial averaging.
We note a distinction between two different approaches to investigating forecast performance on different spatial scales. As one approach, spectral decomposition is one common way to identify different spatial scales, where each spatial scale can be identified with a wavelength of a different spectral basis function, such as a sinusoid or a spherical harmonic. Spectral decompositions have long been used in analyzing predictability on different scales, e.g., [
5,
12,
13,
14] and also have been used for various applications such as to identify predictability of different types of convectively coupled equatorial waves (CCEWs) [
15,
16,
17,
18,
19,
20,
21]. As a second approach, one can use a regional spatial average to identify a particular spatial scale, using an approach as in
Figure 1 but for space instead of time. One difference between these two approaches is that spectral decompositions are global, whereas regional averages are local. For the purposes of the present paper, we would like to analyze forecast performance at different geographical locations, using time-averaging and/or space-averaging, and for this purpose, the regional averaging technique will be more suitable.
The rest of the paper is organized as follows. The methods and data are described in
Section 2. The impact of averaging on forecast performance is assessed in
Section 3, and in
Section 4 a stochastic model is analyzed to provide some theoretical insight. A concluding discussion is in
Section 5. Additional sensitivity studies and theoretical calculations are presented in
Supplementary Materials.
2. Methods
2.1. Data
The operational numerical weather prediction data used here is from the Global Forecast System (GFS) and for two variables: precipitation rate and surface temperature [
22]. The 3 hourly and
gridded global GFS dataset is used here, and it is chosen instead of the
forecast dataset because the
dataset is available out to 16-day lead times instead of 8-day lead times, thereby allowing assessment of longer available lead times and time-averaging windows. The open source data can be downloaded at
https://www.ncdc.noaa.gov/data-access/model-data/model-datasets/global-forcast-system-gfs, accessed on 1 October 2022. Verification of the forecasts is done using GFS day-0 forecast data (also called the day-0 analysis) to serve as the truth for both precipitation rate and surface temperature for assessing the forecast performance. While observational data would be more desirable for the truth data for forecast verification, many quantities are not available globally, and for this or other reasons it is convenient and somewhat common to use the day-0 analysis or reanalysis as the “truth” for verification, e.g., [
1,
16,
23,
24]. For comparison, some additional tests will be reported with observational data of precipitation as the truth for verification.
For those additional tests, Global Precipitation Measurement (GPM) data [
25] are also used as a baseline truth, for comparison with the use of GFS day-0 analysis data as truth for precipitation. The 30-min research/final run version of GPM data with spatial resolution
is used here for the variable “precipitationCal” (Multi-satellite precipitation estimate with gauge calibration). The GPM data are fully available from
N–
S while much data is missing outside this range. Hence, only GPM data within
N–
S are used in the analysis here to ensure stable and reliable results. GPM data can be downloaded from
https://pmm.nasa.gov/data-access/downloads/gpm, accessed on 1 October 2022.
As another type of sensitivity test, data has also been used for anomalies from the seasonal cycle. We have investigated three approaches to creating anomalies from the seasonal cycle. In one approach to create the anomaly data, a smoothed seasonal cycle has been subtracted from the GFS forecast data before moving forward with further analysis. For the seasonal cycle of precipitation rate, the enhanced monthly long term mean CPC Merged Analysis of Precipitation (CMAP [
26]) with
latitude ×
longitude global grid is used (and it can be downloaded from
https://psl.noaa.gov/data/gridded/data.cmap.html, accessed on 1 October 2022). For creating the seasonal cycle for surface temperature, GFS analysis data with lead 0 from 1 January 2005, to 31 December 2017 are used. In the preprocessing, the 6 hourly smoothed seasonal cycle is calculated via the annual mean and the first three harmonics at every location globally through discrete Fourier transform and inverse discrete Fourier transform. A bilinear interpolation was used to interpolate the smoothed
CMAP precipitation seasonal cycle to a
grid to match the grids of the GFS dataset. After removing the smoothed seasonal cycle from the GFS forecast data, the remaining data represent anomalies from the seasonal cycle. In this first approach, note that the seasonal cycle is defined as an average over many years, and it could differ substantially from the seasonal progression during the particular time period considered here. For this reason, we also consider two other approaches that approximate the seasonal progression in the particular time period considered here. In the second approach to create the anomaly data, a 28-day average is applied to the time series in order to define a low-frequency signal as an approximate seasonal progression. The 28 days of averaging is split into 14 days of averaging in the past and 14 days of averaging in the future. This averaged time series is then subtracted from the original time series to define the anomaly data. A third approach is also used, and it is identical to the second approach, except a 14-day average is applied instead of a 28-day average, and the 14-day average is an average in the past 14 days, without any influence from future data. The second approach may provide the best estimate of the low-frequency or seasonal progression near each point in time, although its use of future data may be less desirable for a study of forecast performance. The third approach uses no future data, although its estimate of the low-frequency or seasonal progression may be somewhat skewed by its use of only past data (i.e., a one-sided time window).
Four main assessments are conducted here, and they cover a variety of quantities of interest (precipitation vs. surface temperature), datasets, time ranges (in line with the availability of the datasets), etc.: (1) 3.5 months of GFS precipitation forecast data from 17 June 2019 to 8 October 2019 are compared with GFS day-0 analysis data for precipitation. Note that a longer time period of 11 months for GFS precipitation forecast data is used in assessment 3 below, for comparison with the GPM dataset, in line with the availability of the downloaded data. (2) 11 months of GFS surface temperature forecast data from 1 March 2018 to 28 January 2019 are compared to GFS day-0 analysis data for surface temperature. The durations of 3.5 months of precipitation data and 11 months of surface temperature data arise from the range of data that was available from the GFS website when we undertook our investigation. (3) 11 months of GFS precipitation forecast data from 1 November 2018 to 31 August 2019 are compared with the GPM dataset. (4) The assessments 1 and 2 were also repeated with GFS precipitation/temperature data as anomalies from the seasonal cycle. GFS forecast data for precipitation rate and surface temperature (Assessments 1 and 2) are mainly used in this main manuscript. Analysis involving the GPM dataset and the same analysis on the anomaly data of GFS (Assessments 3 and 4) are investigated as sensitivity tests. More details and results can be found in the
Supplementary Materials.
2.2. Data Analysis Setup
To describe the data analysis methods, the main specifications are the choices of the time- and space-averaging windows, and also some aspects of applying and comparing averages between different types of datasets.
For calculating spatial averages, the averaging region is taken to be the interior of a circle. (A square could also possibly be used, although the orientation of a square would introduce some amount of preferred directionality, whereas a circle is invariant under rotations.) To apply spatial averaging on a circle, we collect all the data points originally from the space grid cells that falls into the desired circle. As the smallest circular region, we use a diameter of 100 km, since it is roughly the same size as the 1 grid spacing of the GFS data. For intuition, a 100-km-diameter circle has an area of roughly 8000 km, which is comparable to the area of the state of Delaware (6446 km). For larger averaging areas, we consider diameters of 450 km, 900 km, and so on, with an increment of 450 km, up to a diameter of 4500 km. For intuition, a 4500-km-diameter circle has an area of roughly 64,000,000 km, which is roughly the combined area of the five largest countries (Russia, Canada, China, USA, and Brazil, together), and is also approximately one-eighth of the surface area of Earth (roughly 500,000,000 km). Hence, a wide range of spatial averaging diameters is considered.
Note that applying spatial averages over large areas can sometimes lead to the concept of “false skill” [
27,
28]. When a large averaging area is used, there could be so many different weather systems contributing to the assessment that it is difficult to ascertain the source of skill or lack thereof. Therefore, care should be used in interpreting the results here with large spatial averaging areas. In light of this, most of the focus here will be on the smaller spatial averaging areas, and the larger areas are included mainly as a further exploration.
For time averaging, the averaging window is of duration
, and the window is centered about the time of interest
t. Explicitly, the averaging window extends from
to
, as illustrated in
Figure 1. As the smallest averaging window, we use a duration of 1 day, since it is somewhat common to assess forecast performance of global models using daily-averaged fields, e.g., [
4,
15] and since diurnal variability is difficult to successfully forecast in NWP models, e.g., [
29]. One difficulty of diurnal variability is that it is often linked to details of convective systems, such as convective initiation and propagation, which occur on fine scales that are not well-represented on the grid of the GFS model, which has a horizontal grid spacing of 28 to 70 km. For longer averaging durations, we consider window durations of 1.5 days, 2.0 days, and so on, with increments of 0.5 days, up to a maximum of 6 days. The 6-day maximum in averaging durations is chosen in order to keep the entire averaging window in the future, without extending back before initialization at day 0, for a lead time of 3 days. More precisely, for a 3-day lead time, a 6-day averaging window would extend from day-0 to day-6, and any larger averaging window would include data from the past.
Time averaging will produce an accumulated precipitation rate over a longer period of time. In the GFS forecast dataset, the precipitation data used is the precipitation rate per 3 h. For the shortest time-averaging window of 1 day, 8 consecutive precipitation rate data points (one data point every 3 h) are added together to form the total precipitation over 24-h in our paper. The different units of precipitation per 3 h or per 1 day, etc., do not have an influence on the the pattern correlation that is used as the forecast performance metric, since the pattern correlation definition includes a rescaling by the standard deviation of the data. For other time-averaging windows, such as a time-averaging window of 2 days, the precipitation data that is analyzed is the precipitation accumulated over those 2 days within the time-averaging window.
Different combinations of lead times and averaging windows will be investigated. For precipitation, forecast performance degrades substantially for lead times of roughly 0 to 5 or 6 days, so the main lead times of interest will be 0 to 6 days. For surface temperature, lead times of 0 to 9 days will be investigated, since surface temperature forecasts remain skillful (e.g., have correlation coefficient of 0.5 or greater) for lead times of roughly one week or longer, depending on geographical location. The GFS dataset used here provides data out to maximum lead times of roughly two weeks, which is long enough to allow asessments with lead times of 9 days and time-averaging windows of 6 days. For each lead time, many different time-averaging windows are considered. For example, for a lead time of 9 days, time-averaging windows are considered of duration 1 day, 2 days, 3 days, 4 days, 5 days, and 6 days.
To achieve the comparability between the forecast dataset and the truth data and a well-defined setup for the time averaging window, some data processing is implemented before calculating the forecast performance with different averaging windows.
First, for comparisons involving spatial averaging window larger than or equal to 900 km, 30 min GPM data are averaged at each latitude and longitude to be coarsened from to at the beginning. The GFS forecast/analysis data and GPM data are then averaged over a circular region with diameter of 450 km (or 900 km, …, 4500 km) followed by the comparison.
Second, for comparisons involving time averaging, the baseline is with spatial averaging with a diameter of 100 km. For high resolution GPM data with , the data is directly averaged over a circular region with diameter of 100 km to create a preprocessed GPM data with 100 km spatial averaging with the guarantee of enough sample points within 100 km for each integer latitude and longitude. For GFS data with , an underlying problem arising for those tropical locations is that they don’t have enough sample points within 100 km spatial averaging due to the coarse grid. To achieve a better estimate, a bilinear interpolation has been applied to the GFS dataset to create new data with grids, which is then spatial averaged over a circular region with diameter of 100 km as a new preprocessed GFS dataset. Using the preprocessed datasets, we can move forward to do time averaging with 1 day, 1.5 days, …, 6 days.
In comparing the analysis signal and the forecast signal, the same averaging is applied to both the analysis data and the forecast data.
2.3. Evaluating Forecast Performance
The Pearson correlation coefficient
is used here as the main metric for evaluating the forecast performance. The coefficient
can be expressed as
where
is the covariance between
and
are the standard deviations of
respectively. In practice, the expected value
is calculated empirically as a time average, so
is a constant that doesn’t change over time. In particular, in a situation of analyzing the real data, we have the true data from the true signal as
and our corresponding predictions
, each given at
N points in time. The correlation coefficient is calculated by
Other measures of forecast performance, such as root-mean-square error and continuous ranked probability score, have also been used in other studies [
5,
6]. Note that the pattern correlation will measure the correlation of the time series patterns, but it will not measure intensity and bias. The pattern correlation is used here for the simplicity of its definition. In a similar study, but with idealized stochastic models rather than numerical weather prediction model data, the conclusions about time- and space-averaging effects were essentially the same when measured based on pattern correlation or a scaled version of root-mean-square error [
11]. Note that skill scores are commonly defined as metrics that measure performance relative to a reference or benchmark, e.g., [
30,
31]. While pattern correlation is a ratio of a covariance,
cov, and the climatological reference standard deviations,
, it is common for skill scores to be defined in other ways. When the term “skill” is used in what follows, it is meant as a more brief terminology in place of “pattern correlation”, and will frequently be noted as such in those cases.
2.4. Computational Methods
A substantial computational cost is required in order to calculate forecast performance with various spatial and time averaging windows and at all global locations. For example, consider the assessment of the forecast performance for GFS temperature data with different time averaging windows (1 day to 9 days) and different spatial averaging, using as input a global dataset with approximately one year of data at 6 hourly time intervals. Furthermore, the GFS temperature forecast dataset includes lead times from lead 0 to lead 16 days. To analyze such a dataset, memory of about 70–75 GB is needed for each latitude to keep the running time of the calculation within about 8 h for one latitude.
To manage these costly calculations, high-throughput computing (HTC) is used [
32]. HTC is designed for a different type of computing task in comparison to high-performance computing (HPC). While HPC involves a coupled computing environment with frequent communication between processors, HTC is designed for computing tasks that involve minimal communication. Since the global data here can be partitioned into several independent regions (e.g., for different latitudes), HTC is a useful computing paradigm for simultaneously analyzing data from each region independently. Our calculations were performed using the resources of the Center for High Throughput Computing (CHTC) at the University of Wisconsin–Madison. By using HTC, we are able to evaluate forecast performance at all latitudes simultaneously, to reduce the overall calculation time.
3. Impact of Averaging on Forecast Performance
The earlier plots in
Figure 2 used a particular choice of the averaging window sizes and also a particular location of Madison, Wisconsin. To investigate further, in this section, an expanded analysis is carried out to consider whether the results are similar or different for different averaging window sizes and different locations.
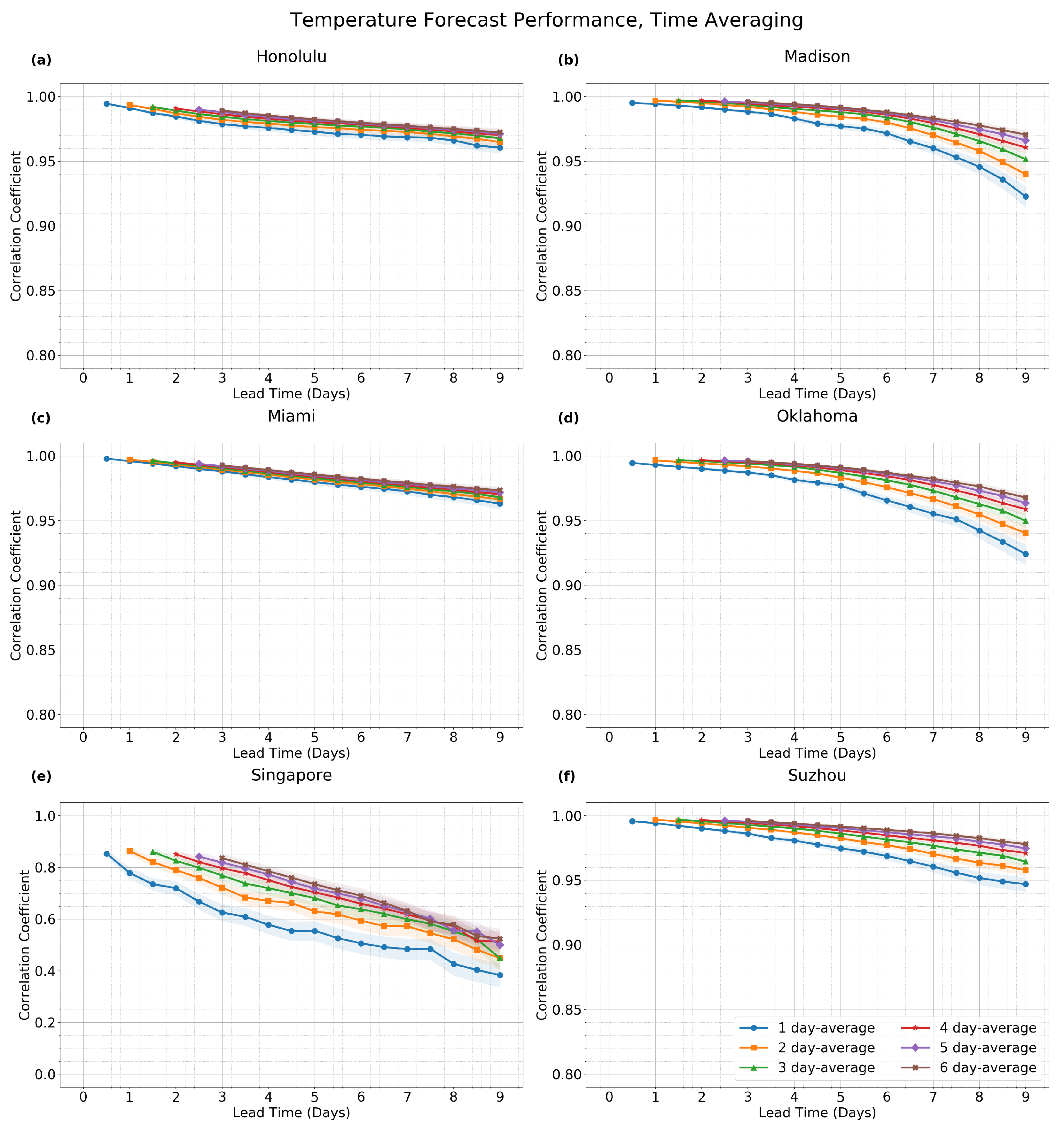
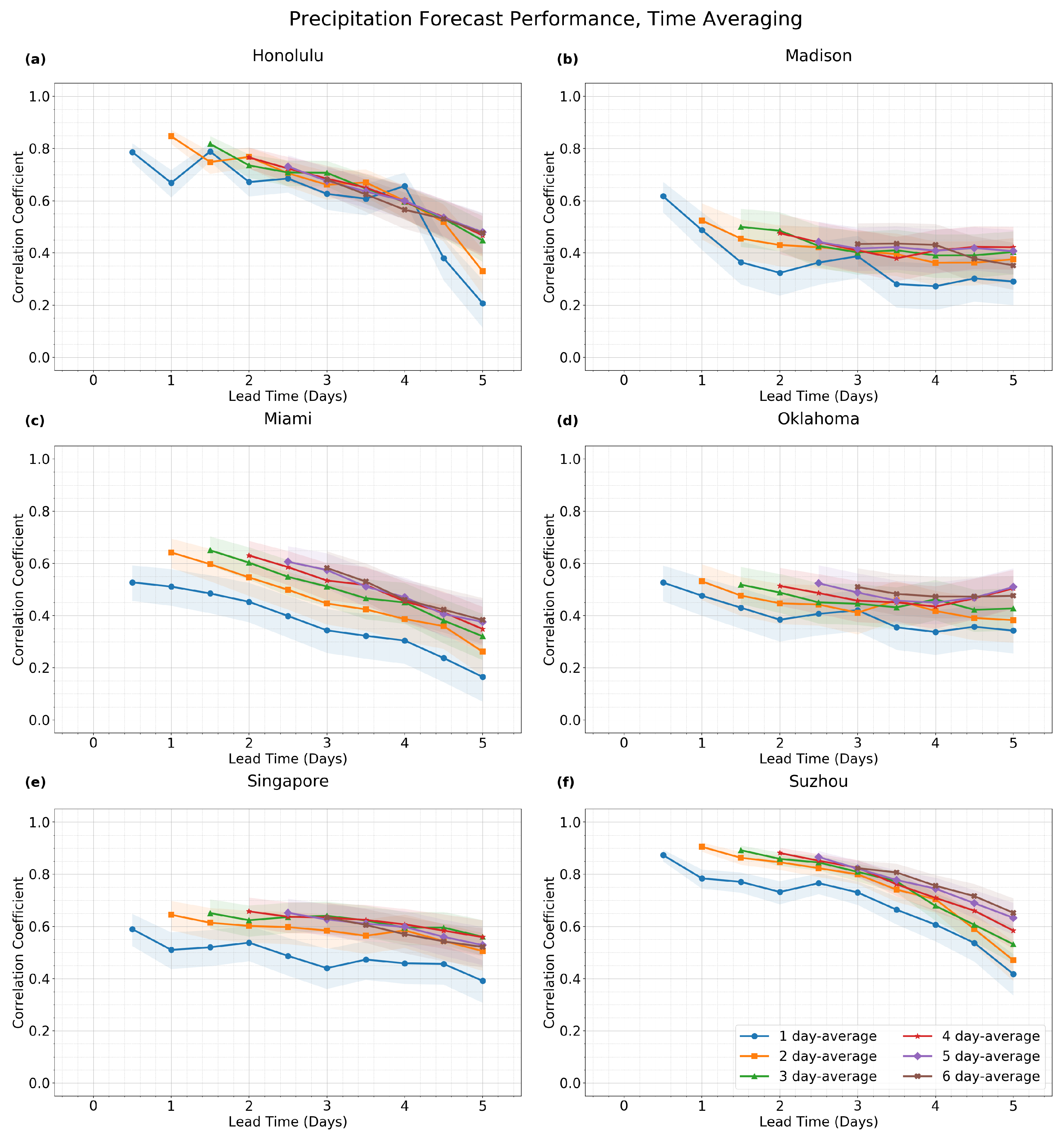
The effect of time averaging on surface temperature forecasts is shown in
Figure 3. In order to assess results for a variety of different geographical and climatic conditions (e.g., land vs. sea, tropical vs. extratropical, etc.), data is shown from six different locations: Honolulu, Hawaii; Madison, Wisconsin; Miami, Florida; Oklahoma City, Oklahoma; Singapore; and Suzhou, China. Six different curves are plotted for each location, and each of the six curves is a different color, and each curve represents the forcast performance under one of six cases of the time-averaging window duration: 1 day, 2 days, 3 days, 4 days, 5 days, or 6 days. By comparing the different curves at a single location, one can analyze how much improvement arises in the forecast performance as the duration of the time-averaging window is increased. From this figure, one can see that time averaging can have substantially different effects, depending on the particular geographic location. For instance, relatively little improvement in forecast performance is seen for Honolulu and Miami, whereas a much greater improvement is seen for the other locations.
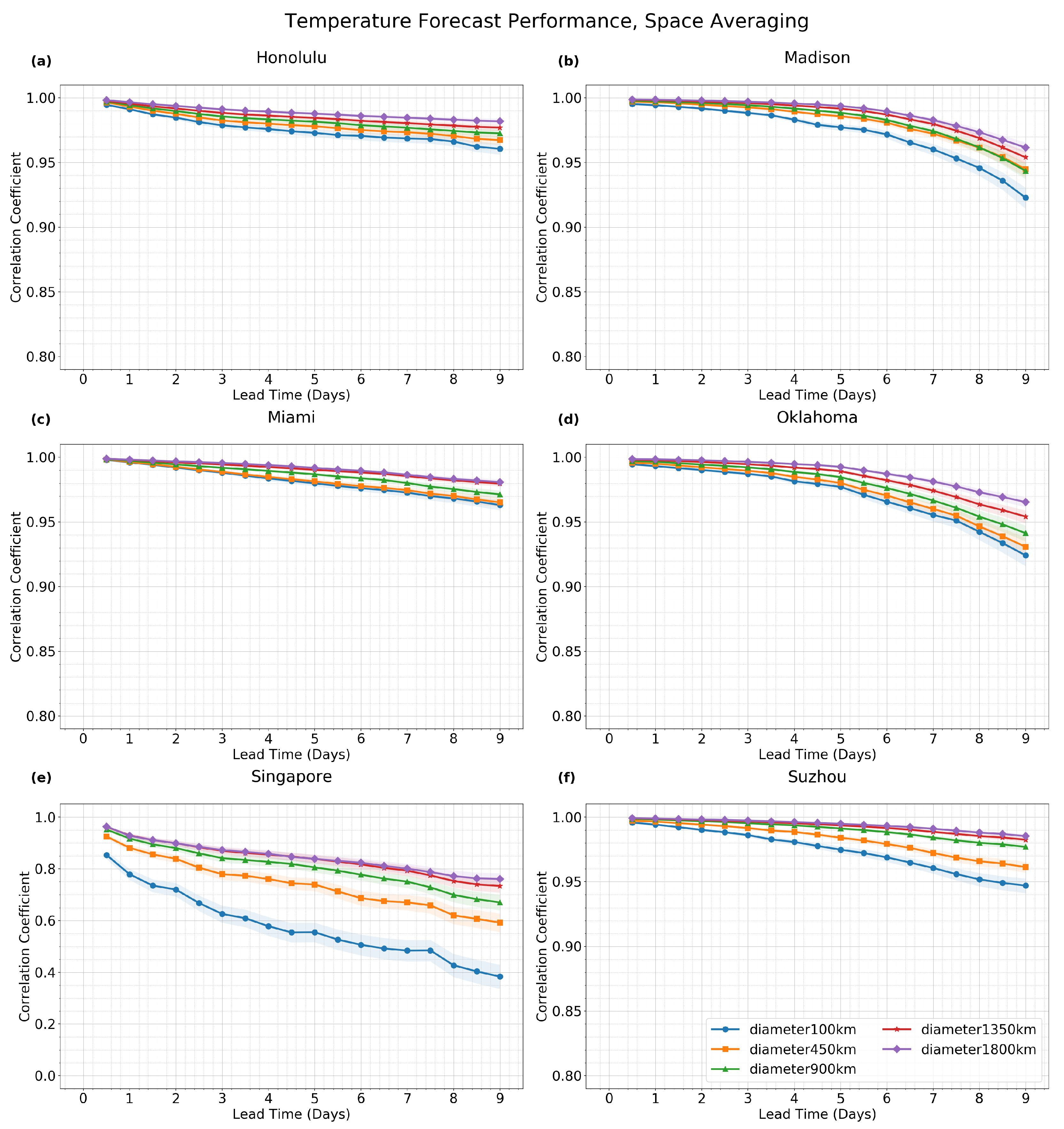
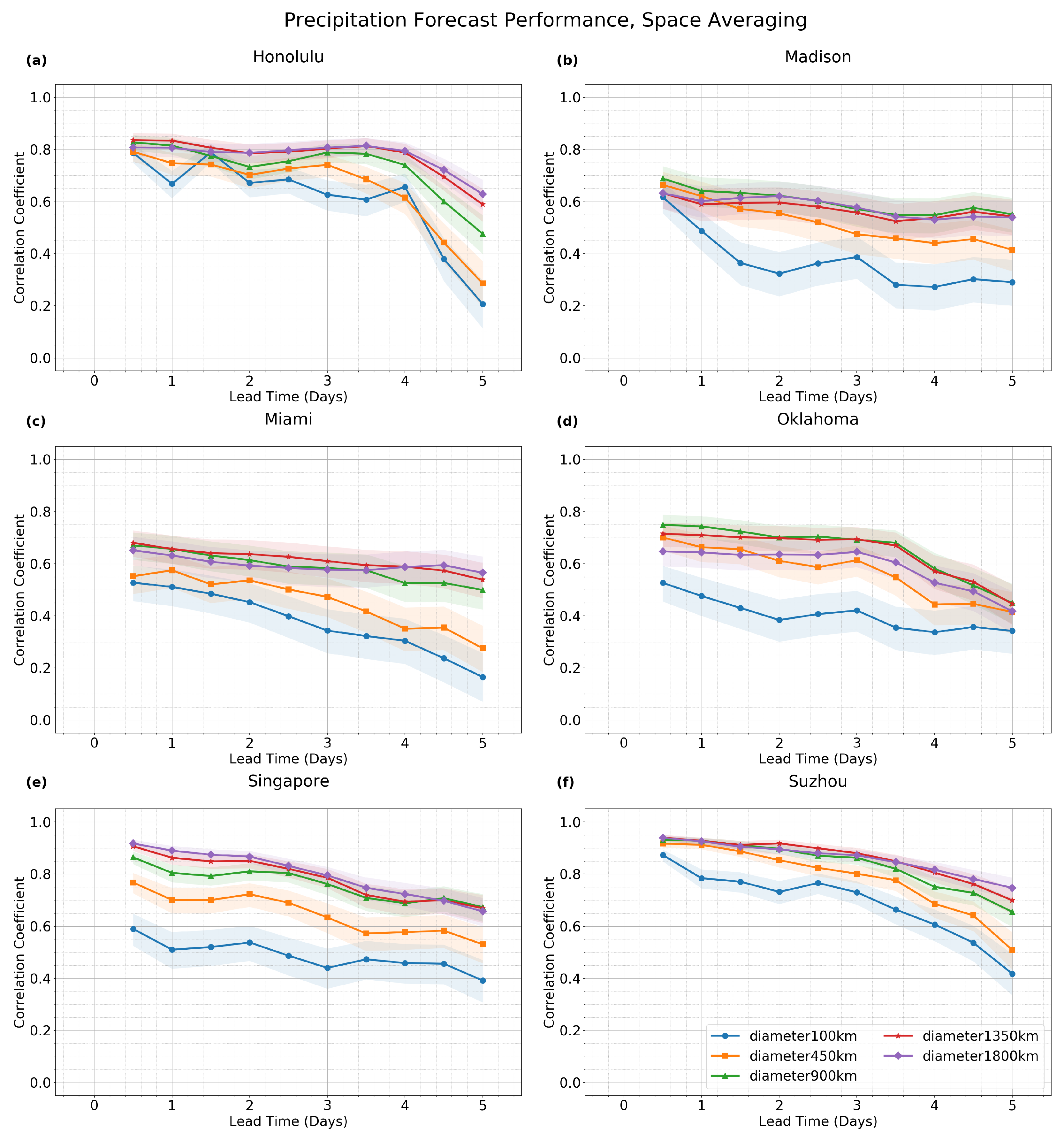
For space averaging (
Figure 4), similar statements are true, although there is less of a distinction in forecast improvement between Honolulu and Miami on the one hand and the rest of the locations on the other hand.
Note, for aiding the comparison, that the baseline case (blue curve) in
Figure 4 is the same as in
Figure 3, as both use 1-day time averaging and 100-km spatial averaging.
Note that, for the time averaging results in
Figure 3 and
Figure 4, the forecast performance for lead time
L is only reported if the lead time is greater than the half-width of the time-averaging window (i.e., if
). This condition will restrict attention to scenarios where all the forecast data lies in the future, so that it is a true “forecast” in the usual sense of the word. For instance, for a lead time of 1 day and a time averaging window of
days, the time averaging window would include data from 3 days into the future and 1 day into the past, so no data is plotted in this case.
For precipitation, similar plots are shown in
Figure 5 for time averaging and in
Figure 6 for spatial averaging. In these plots, time averaging improves forecast performance the least at Honolulu and the most at Miami, Singapore, and Suzhou. Space averaging also improves performance the least at Honolulu, along with Suzhou, and the most at Singapore. These statements are based on the general spread of the curves over all time- and space-averaging windows that are considered. Some details of these statements could change depending on the type of comparison. For instance, if a more restricted comparison is made between only two space-averaging diameters of 100 km and 450 km, then the greatest improvement in forecast performance is seen at Oklahoma City and a great (but slightly less) improvement is seen at Singapore. In any case, these plots illustrate that time- and space-averaging can have different impacts at different locations.
While
Figure 3,
Figure 4,
Figure 5 and
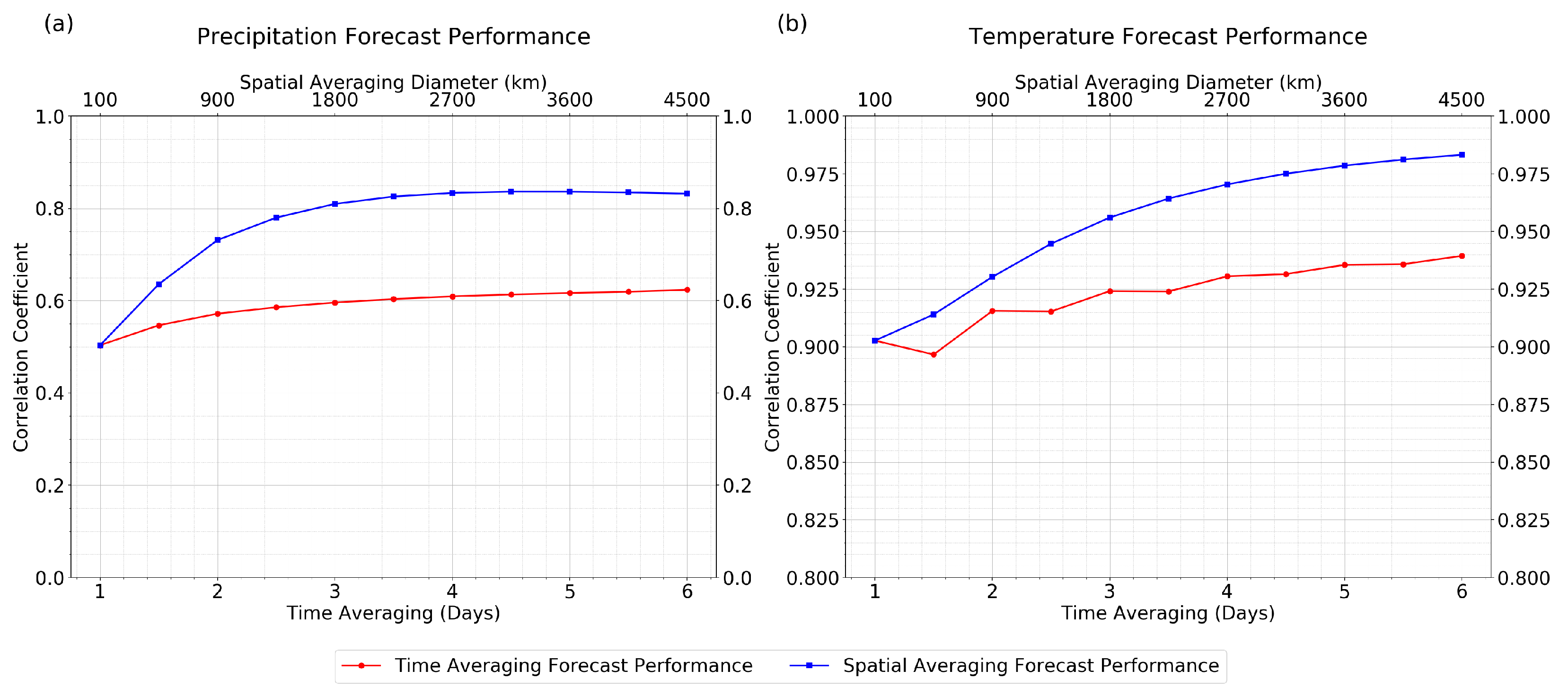
Figure 6 showed geographical differences, the globally averaged behavior is summarized in
Figure 7. To simplify the plots, only one lead time is shown for each variable: 3 days for precipitation, and 7 days for temperature. The forecast performance is reported as a correlation coefficient, although it is a global average of correlation coefficients. In other words, the skill (correlation coefficient) was first calculated for each location on the Earth, and then the skill was averaged over all locations globally, leading to the the globally averaged forecast skill that is plotted in
Figure 7.
In
Figure 7, for precipitation, a substantial improvement in forecast performance is obtained from spatial averaging. In particular, the skill (correlation coefficient) increases from roughly 0.5 to roughly 0.8 upon increasing the spatial-averaging diameter from 100 km to 1350 km. Large improvements in forecast performance are also seen in temperature due to spatial averaging. (Note the different axis range for temperature, for which the correlation coefficient is always larger and above 0.9, since temperature is more predictable than precipitation.) On the other hand, for time-averaging, the correlation coefficient increases, but by a lesser amount. For precipitation, for instance, the increase in skill (correlation coefficient) is from 0.5 to roughly 0.6 upon increasing the time-averaging window to nearly one week (6 days). To achieve such a skill level with spatial averaging, a space-averaging diameter of only 450 km is needed.
Note that precipitation analysis data can be less accurate at high latitudes, and
Figure 7 was created using precipitation analysis data over the entire globe. As a sensitivity study and comparison, GPM precipitation data has also been used for the forecast verification, and the data is restricted in latitude from only 60S to 60N. The result of this sensitivity study is presented in the
Supplementary Materials, and the main features are similar to
Figure 7a.
It is interesting to note that Buizza and Leutbecher [
5] show, in their Figure 8, only minimal increase in the forecast skill horizon from increasing amounts of spatial filtering. On the other hand,
Figure 7 here displays substantial improvement of forecast performance from increasing amounts of spatial averaging. The difference between the results of Buizza and Leutbecher [
5] and the results here are possibly related to the different methods of spatial filtering. Buizza and Leutbecher [
5] use a spectral truncation as a spatial filter, whereas the present paper uses a local, regional spatial average. Other factors could also contribute to the differences, such as the different physical fields that are analyzed.
In the earlier plots, results were shown for several locations in
Figure 3,
Figure 4,
Figure 5 and
Figure 6 and for a global average in
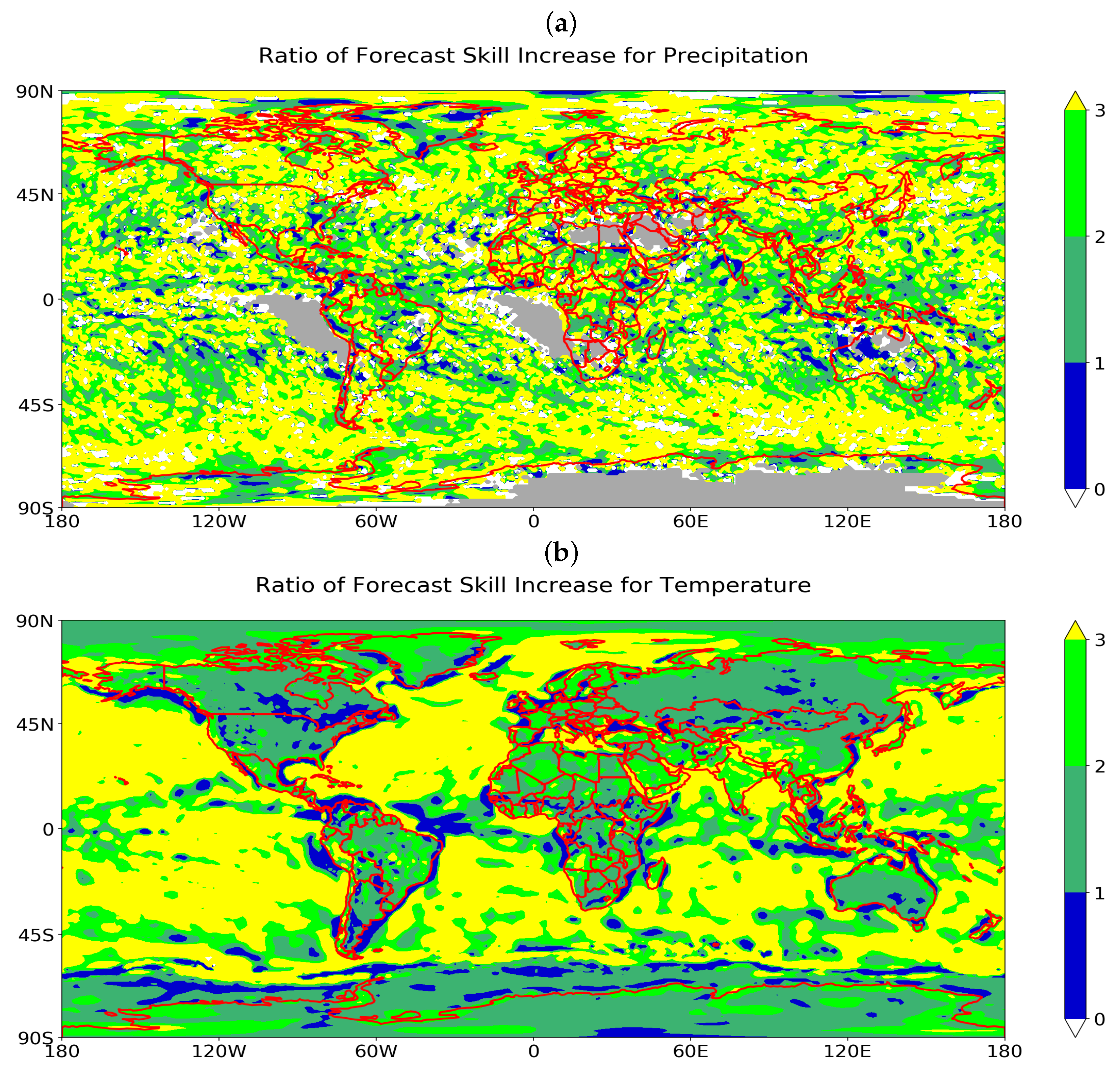
Figure 7. As another perspective, it would be interesting to view a map of every location on Earth. To aide in the creation of the map, the time-averaging and space-averaging results will be combined together and contrasted by using a ratio
r that is defined as
, where
is the forecast skill (correlation coefficient), and
is the change in forecast performance due to an increase in time-averaging window duration (from 1 day to 2 days), and
is the change in forecast performance due to an increase in spatial-averaging window diameter (from 100 km to 900 km). We choose averaging windows of 1 day and 100 km because they are the smallest window sizes considered here, and we consider increases to 2 days and 900 km because they are somewhat small increases but still large enough to show changes in forecast performance, as seen in
Figure 3,
Figure 4,
Figure 5 and
Figure 6. The ratio of 800 km versus 1 day is approximately 10 m s
, which is a typical value of a characteristic velocity of synoptic scale or mesoscale fluctuations. Hence, in this setup, if
, then spatial averaging is more effective than time averaging at improving forecast performance, whereas if
, then time averaging is more effective than spatial averaging at improving forecast performance, at least for the selected averaging windows of 1 to 2 days and 100 to 900 km.
Figure 8 shows that, at nearly all locations worldwide,
and therefore spatial averaging is more effective than time averaging at improving forecast performance, at least for the selected averaging windows of 1 to 2 days and 100 to 900 km. In further detail, space averaging is, in fact, much more effective, since
or 3 over much of the map.
Note that some manual color settings are used for some special or extreme cases in creating
Figure 8 to better present the comparison between time averaging and spatial averaging. Areas are marked with white if a negative ratio
r occurs; such a situation corresponds to improved forecast performance by spatial averaging but the degraded forecast performance by time averaging. In the opposite scenario, when a forecast increase is seen for time averaging and a forecast performance decrease for spatial averaging, the ratio
r is manually set to be 0.001 for visualizations with blue colors to represent better forecast improvement through time averaging. Grey areas are locations where either missing values are present or where the forecast performance degrades for both spatial and time averaging, since this latter scenario should be distinguished from positive
r values due to forecast performance improvements for both spatial and time averaging. To summarize, in the global map presented in the paper, only blue color represents a better forecast improvement for the time averaging, grey color represents locations where a comparison is invalid due to missing values or that forecast performance degrades due to time averaging and also degrades due to spatial averaging, and all the other colors (yellow, forest green, medium sea green, white colors) are locations where spatial averaging has increases in forecast performance compared to the time averaging.
Some interesting geographical features can also be seen in
Figure 8. For instance, for precipitation, in
Figure 8a, the data has a random-looking geographical pattern. Over much of the map for precipitation, spatial averaging is three times more effective (
, yellow areas) than time averaging at improving the forecast performance. It is only in very few small regions that time averaging performs more efficiently (blue areas). Perhaps the main geographical features in the map for precipitation are the grey regions, which are colored grey due to limited precipitation over, for instance, the Sahara desert, the Arabian desert, and the stratocumulus cloud decks off the western coasts of Africa and South America. For surface temperature, in
Figure 8b, an interesting characteristic is an apparent land–sea contrast: time averaging is least effective compared to spatial averaging (
, yellow color) over ocean regions, less effective (
, green colors) over land regions, and more effective (
) over coastal regions. These geographic features are so apparent in the spatial map of
r values that the outlines of the continents arise naturally in
Figure 8b. Time averaging is more effective than spatial averaging at only a small number of locations, along the coastlines of the continents; this is possibly due to the unique conditions associated with coastal microclimates.
Additional sensitivity studies have also been carried out to analyze anomalies from a seasonal cycle. The seasonal cycle was defined using three different methods, as described in
Section 2. One reason to analyze anomalies from the seasonal cycle is that one may want to know the skill in predicting only the day-to-day fluctuations, whereas the raw data includes seasonal fluctuations that will also influence the pattern correlation in the forecast verification. The results of the sensitivity studies are shown in plots in the
Supplementary Materials. One difference that arises for anomalies from the seasonal cycle is that the forecast skill (pattern correlation) is lower for anomalies. Another difference is that the geographical pattern and land–sea contrast in
Figure 8 could be more pronounced or less pronounced, depending on the method of defining the seasonal component. Further study would be helpful to investigate the land–sea contrast in more detail. One similarity across different tests is the greater effectiveness of spatial averaging compared to time averaging at increasing the forecast skill (pattern correlation), which is seen in global averages in
Figure 7 and also in all of the sensitivity studies.
4. Theoretical Investigation
In the results in
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8, it was seen that time averaging was not as effective as space averaging at improving forecast performance, at least over the averaging windows considered here on meso-to-synoptic scales from 1 to 6 days and 100 to several thousand kilometers. From basic intuition, one would expect that time averaging should provide a smoother time series, and a smoother time series should be more predictable; however, such enhanced predictability was more limited than one might expect.
To better understand these results, here we give a theoretical demonstration to show that if a time series is smoothed via averaging, it is not necessarily much more predictable. A theoretical illustration of this can be seen using an auto-regressive (AR) model (also called red noise, correlated noise, colored noise, or the Ornstein–Uhlenbeck process in the continuous-time version). The AR(1) model takes the form
where
is the quantity of interest (e.g., precipitation or surface temperature) at time step
n,
is the time step,
is the decorrelation time, and
is a white noise process. Such a model is often used to represent atmospheric and oceanic phenomena, e.g., [
17,
33,
34]. Other types of models, such as machine learning-based models, e.g., [
35,
36] or data-driven models, e.g., [
37,
38] or nonlinear stochastic models, e.g., [
39,
40,
41,
42,
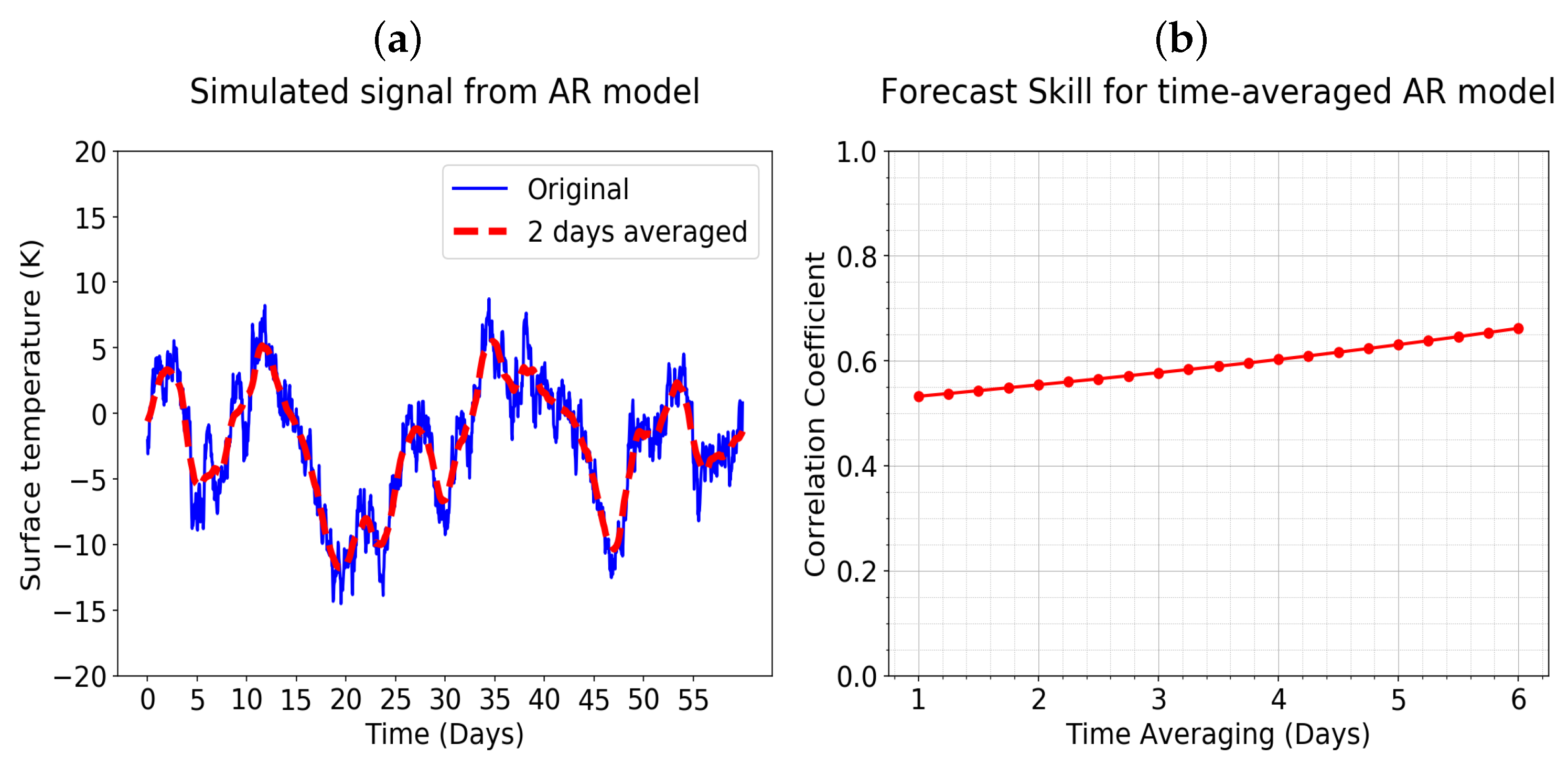
43], could also be investigated, although the AR(1) model will be the focus here because it is simple and facilitates exact analytical solutions. An example time series is shown in
Figure 9a. The example was created to be similar to a surface temperature signal, and it uses a decorrelation time of
days. Also shown in
Figure 9a is a smoothed version of the AR(1) time series which was created by time averaging over a window of 2 days. The time-averaged signal is much smoother than the original signal, and one might therefore expect the time-averaged signal to be much more predictable.
In
Figure 9b, an experiment is implemented for testing the impacts of time averaging on the simulated time series from the AR process using 3 days as the lead time. One can see that, as the time averaging window increases, the forecast performance has only slight improvements, similar to what had been seen in the operational weather forecast data in
Figure 7.
Analytical formulas can be derived to better understand the effects of time averaging on the AR model. As one quantity of interest, the decorrelation time provides a measure of predictability, and its value
for the time-averaged process can be calculated by
where
is the autocorrelation function with time lag
. For the signal
from the original AR(1) model (in its continuous-time form as the Ornstein–Uhlenbeck process), the autocorrelation function is
, and the decorrelation time is
. For a time-averaged signal (
) averaged over a time window with length
, we find the decorrelation time to be
or, in approximate form,
The analytical formula in (5) provides insight into how the time averaging window length,
, affects the decorrelation time,
. When time averaging is performed on the signal, how does the decorrelation time
of the smoothed signal compare with the original signal’s decorrelation time,
? As seen in (5a),
is proportional to
, and the proportionality factor depends on the key quantity
. If
is small—i.e., if the time-averaging window length is smaller than the original signal’s decorrelation time—then time averaging has only a small impact on the decorrelation time and forecast performance. For example, in
Figure 9, where
days, a time averaging window of
days leads to a
that is only 18% larger than
. This is a somewhat small change given what might be expected from how much smoother the time-averaged signal looks in
Figure 9a. Even for larger values of
, which would create even smoother time series, the corresponding increase in
is somewhat small compared with what one might expect. For example, when
, so that the time-averaged signal is greatly smoothed, the corresponding decorrelation time is
, for a 36% increase even in this largely smoothed case. Both of these examples are in line with the approximation, shown in (5b), of
, which suggests that the additional decorrelation time brought about by time-averaging is only one-third as large as the time averaging window duration
. These slight changes in decorrelation time will then translate into only slight changes in forecast performance.
5. Conclusions
An investigation was conducted to assess the effects of time averaging and space averaging on forecast performance, with the aim of doing so in a systematic way. To do so, all parameters were held fixed (lead time, etc.) except for changes in the averaging window. Another aspect of the systematic setup is that the time averages were conducted with a centered averaging window from time to .
One feature seen here is that the effects of time averaging and space averaging can differ in different geographical locations. Based on global maps and specific location examples, it was seen averaging effects for surface temperature are distinctly different in land regions, ocean regions, and coastlines. For precipitation, on the other hand, averaging effects appeared to be more randomly distributed over the globe and did not show any particular geographic pattern.
Furthermore, the results show evidence that time averaging actually does not provide a substantial improvement in forecast performance, in comparison to spatial averaging, at least over the range of scales of 1 to 6 days and 100 to several thousand kilometers and lead times of under 2 weeks which were considered here. Consistent evidence is seen in forecast data from both operational weather forecasts and simple stochastic models (either time series models or spatiotemporal stochastic models) that can be studied analytically. Taken together, this is evidence from a variety of models that time averaging may create a smoother time series that is not necessarily much more predictable.
One could speculate on the possible origin of the conventional wisdom that time averaging should improve forecast performance. It is possible that the conventional wisdom arose in an early era of forecasting, before the improvements that have been seen in recent decades in methods for model initialization and data assimilation, the use of ensembles, and improvements to the models themselves, such as higher resolution, e.g., [
2,
44]. We note that the impact of ensembles was not tested with the use of GFS data here, and it would be interesting to investigate the effect of ensembles in the future; as a result, the use of GFS data provides a testbed with modern forecast techniques although where ensembles are not part of those modern-era techniques. If the initial conditions and forecasts were more uncertain during earlier eras of forecasting, then a time average would possibly have a larger impact on improving forecast performance.
It is also possible that the effects of time averaging depend on the time scales of the averaging and the lead time. Here, lead times of one day to roughly one week were investigated, along with time averaging windows of duration up to 6 days.
These time scales were chosen for investigation here because they constitute the regime of classical weather forecasting, which is perhaps the simplest forecasting setting for investigating the effects of averaging.
An interesting question for future work is to investigate other time scales, such as the forecasting setting of subseasonal to seasonal (S2S) predictions or short-term climate predictions, e.g., [
45,
46,
47], or other quantities such as wind. The properties of averaging for these longer lead times and averaging times would be valuable for many forecast users who utilize extended-range forecasts and S2S predictions. In this forecasting setting, different properties may arise, or alternatively one may expect the principles of the theoretical AR model (
Figure 9) to hold no matter the time scales.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








