1. Introduction
A soft robotic gripper using a soft pneumatic actuator (SPA) is able to grasp irregularly shaped objects due to its excellent properties [
1,
2]. It is effective to apply rigid structures to improve the loading ability of SPA. Park Wookeun et al. integrated soft material and rigid structures to increase the lifting force [
3]; Pagoli Amir et al. added a stiff rod inside each soft finger to change to a bending point [
4]. Rigid structures can be used to improve the loading ability of SPA, but embedding rigid structures inside the soft fingers can easily puncture the soft finger and cause air leakage. Applying a rigid actuator outside the soft gripper is another way to improve the lifting force by providing an extra support force [
5].
High air pressure has higher requirements for equipment and higher expenses. Snehal Jain’s gripper required 80 kPa to reach a lifting force of 13.72 N [
6], and Chih-Hsing Liu et al.’s gripper needed 80 kPa to reach a lifting force of 50.1 N [
7]. They needed high incremental pressure to grasp heavy objects, which is also a security hazard when the air chamber cannot withstand such high pressure. Grasping heavy objects (about 5 kg) at lower incremental pressure (below 30 kPa) can save energy and improve production efficiency.
The dimensions of objects typically govern the structure of designed grippers. When the grippers grasp large-sized objects, a large contact area can help deliver a wrapping grip, which favors the stability of grasping [
8]. However, the grasping of large-size objects requires a long actuator [
9]. When the actuator is too long, the deformation curvature of the actuator will be much greater than the diameter of the sphere [
10], which decreases the contact area between the gripper and the surface of objects. Applying the skeleton layer outside the soft gripper well constrains the radial expansion and significantly enhances the bending motion [
11].
In addition, one common issue for traditional SPA is that the contact area between the soft fingers and the grasped objects is small, which affects the stability of the grasping [
12]. Tawk Charbel et al. increased the contact area between the soft fingers and the grasped objects to significantly enhance the conformability of the gripper by using mechanical metamaterial [
12]. Using soft silicone is another way to increase the contact area. In many previous studies [
3,
4,
5,
6,
7], only one type of silicone was selected for the manufacturing of the soft fingers, which limits the performance of the soft gripper. The same type of silicone has the same expansion rate, which makes the bending curvature the same. Under this circumstance, the upper surface of some grabbed items like cubes will not be pressed by the fingers because the grasping curve is nearly a circle. On the contrary, beneficial intrinsic mechanical properties of silicones directly implied in the different parts of the soft gripper can improve the performance of the soft gripper [
13]. Soft silicone is easier to deform and fit items but harder to support the item due to its low strength, while hard silicone has a stronger anti-extrusion property but poor deformation. By applying different types of silicone with specific hardness in specific parts of the soft fingers, we make use of the beneficial intrinsic mechanical properties of both soft silicone and hard silicone. The curvature of the grasping curve is variable because of the variable hardness of the silicone.
In this paper, we design the rigid supports outside the soft fingers, which provide an inward torque, making the objects lifted mainly by the support force and limiting the growth of the deformation curvature to improve the grabbing ability. The main contributions of this paper are as follows: (1) the design and the principles of the rigid supports, (2) the fabrication and experimental verification of the soft gripper, and (3) the demonstration of the soft gripper.
3. Design and Grasping Principles of the Proposed Gripper
This research designs and assembles a soft gripper with variable curvature, which can grasp objects more adaptively and firmly. Coupled with rigid supports, the proposed soft gripper can easily achieve wide-range bending and adaptive grasping. The soft fingers deliver a wrapping grip while the rigid supports enhance the lifting force.
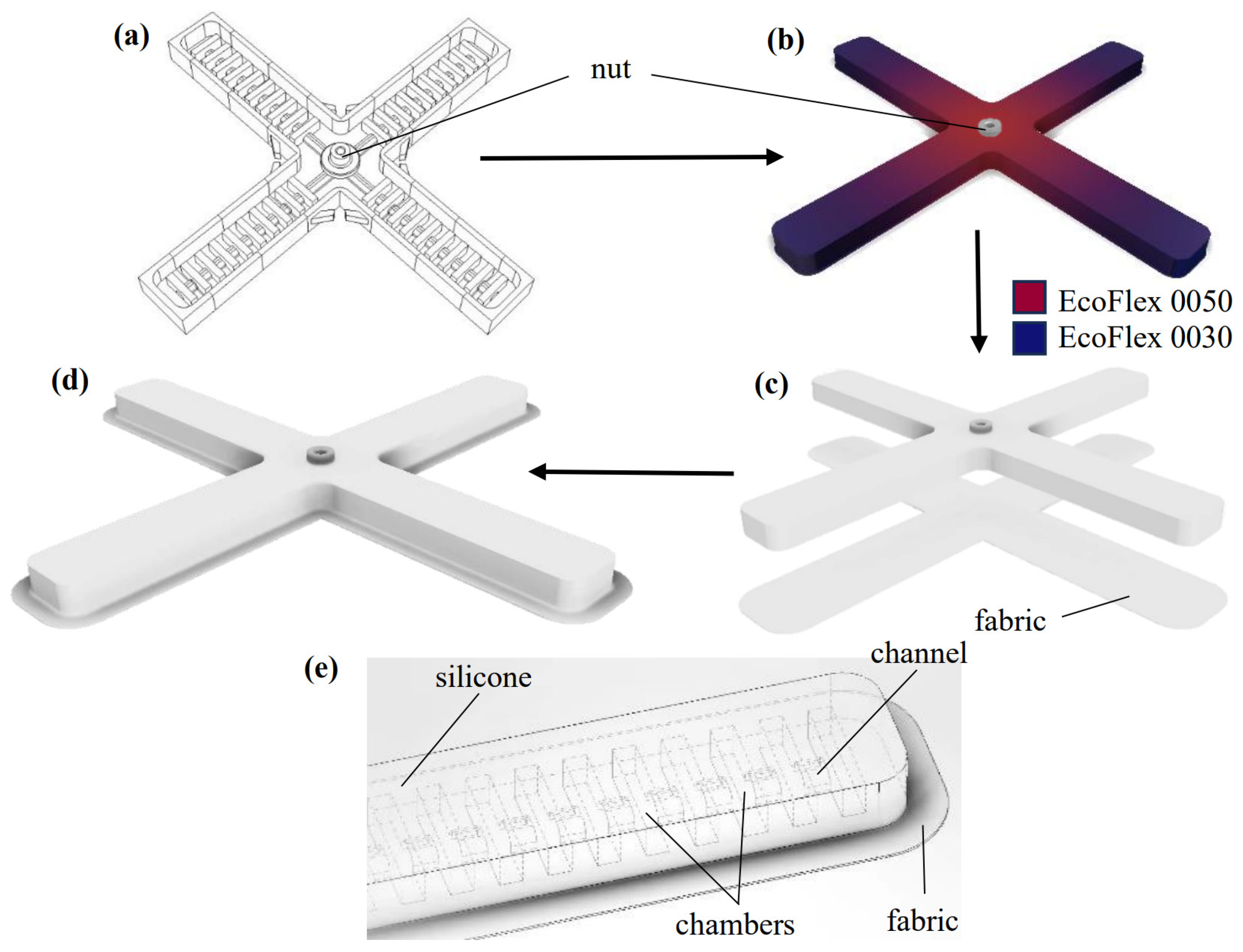
3.1. Soft Fingers
Each chamber expands like a balloon. Large deformation of the chamber requires silicones that can withstand high stress, and Ecoflex-0030 and Ecoflex-0050 are applied in this work. The fabric at the bottom of the soft finger limits the stretching in the tangential and axial directions, which makes the upper side of the chamber grow longer in the axial direction than the lower side after the expansion in order to make the soft finger bend. FEM simulations are conducted to verify the grasping principle using the database of silicone materials [
19]. Three groups of different distributions of silicones on one soft finger in 20 kPa (
Table 1) are designed to show the effect of intrinsic mechanical properties of silicones on different parts of the soft gripper to improve the wrapping performance of the soft gripper.
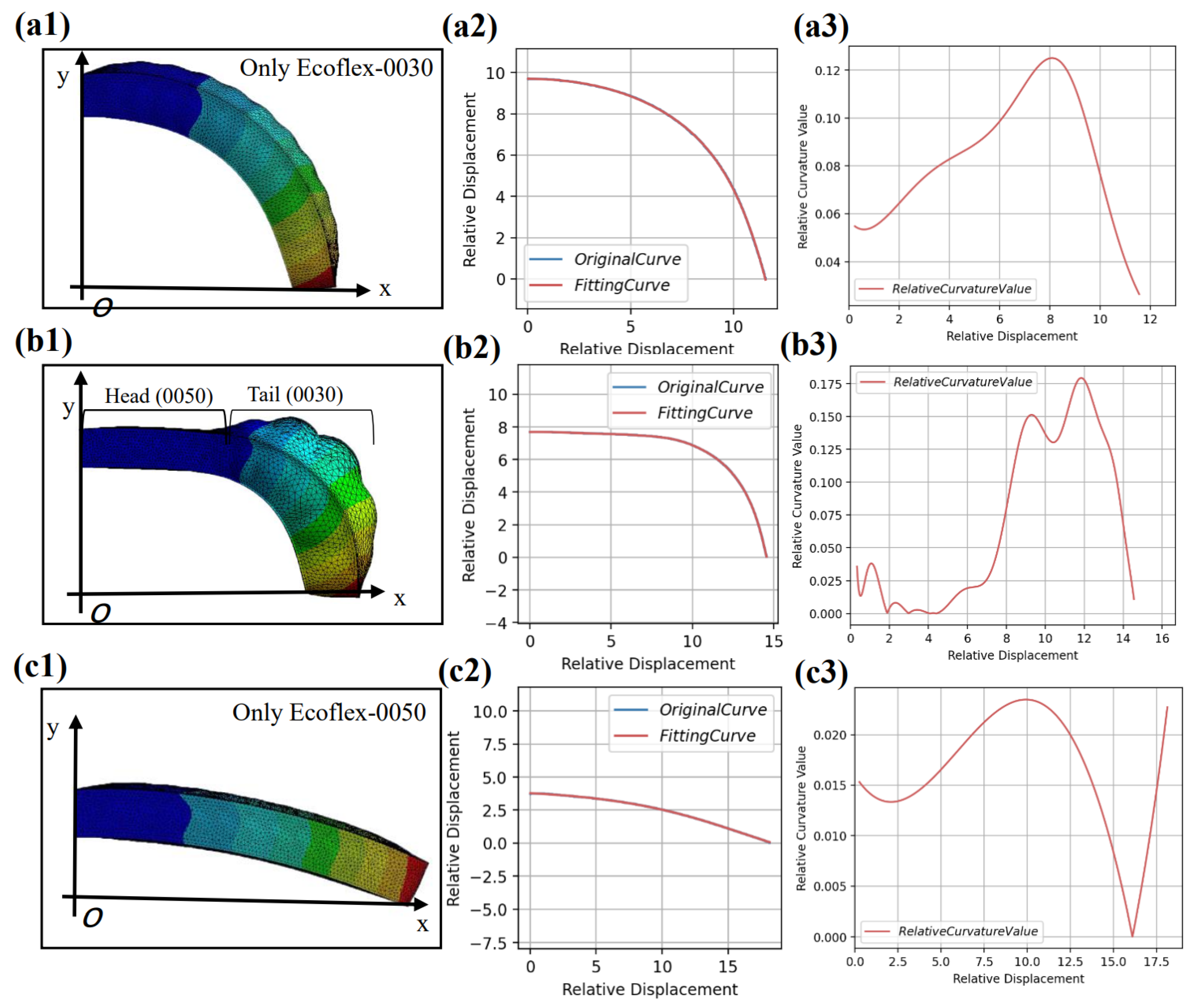
The “head” part and the “tail” part are indicated in
Figure 3(b1). The junctions between the fingers are selected as the zero point of the
x-axis and the lowest point of the bending curve as the zero point of the
y-axis to analyze the FEM results. The governing equations of the relative curvature value in
Figure 3 are as follows:
where
and
are the relative displacement value from point
(
Figure 3(a1,b1,c1)), and
is the fitting function between
and
, and
is the relative curvature value. The original curve and the fitting curve are highly coincident (
Figure 3(a2,b2,c2)).
The governing equations of the relative curvature’s variance in
Table 1 are as follows:
where
is the variance of relative curvature value, and
is the maximum total deformation in FEM. It is demonstrated in
Table 1 that the silicone with a lower Young’s Modulus contributes to wider range deformation, which makes the soft fingers have stronger wrapping ability but weaker strength. From
Table 1, the variance of relative curvature value for the gripper with mixed silicones is the greatest, showing that applying different silicones in different parts of the gripper has a large impact on the deformation of the gripper.
Comparing a1, b1, and c1 in
Figure 3, it is obvious that the deformation in the x axis and the y axis are all different due to different values of Young’s Modulus. The inflation of the “head” part (using rigid Ecoflex-0050) is smaller than that in the soft “tail” (Ecoflex-0030). The bending of the Ecoflex0050 part of group 2 is smaller than the same part of group 3, while it is larger than that of group 1, which is also reflected in the curvature (
Figure 3(a3,b3,c3)). When applying different silicones in one finger, the intrinsic mechanical properties will be enhanced. The deformation of silicone with a smaller Young’s Modulus is greater than usual, while the deformation of silicone with the greater Young’s Modulus is smaller than usual, which has been verified in the following experiment (
Section 3.3. Bending Performance Comparison).
Therefore, by using Ecoflex-0050 in the “head” part and Ecoflex-0030 in the “tail” part, although the maximum total deformation is smaller, the contact area and the bending degree at the fingertip increase, which means more adaptive grasping.
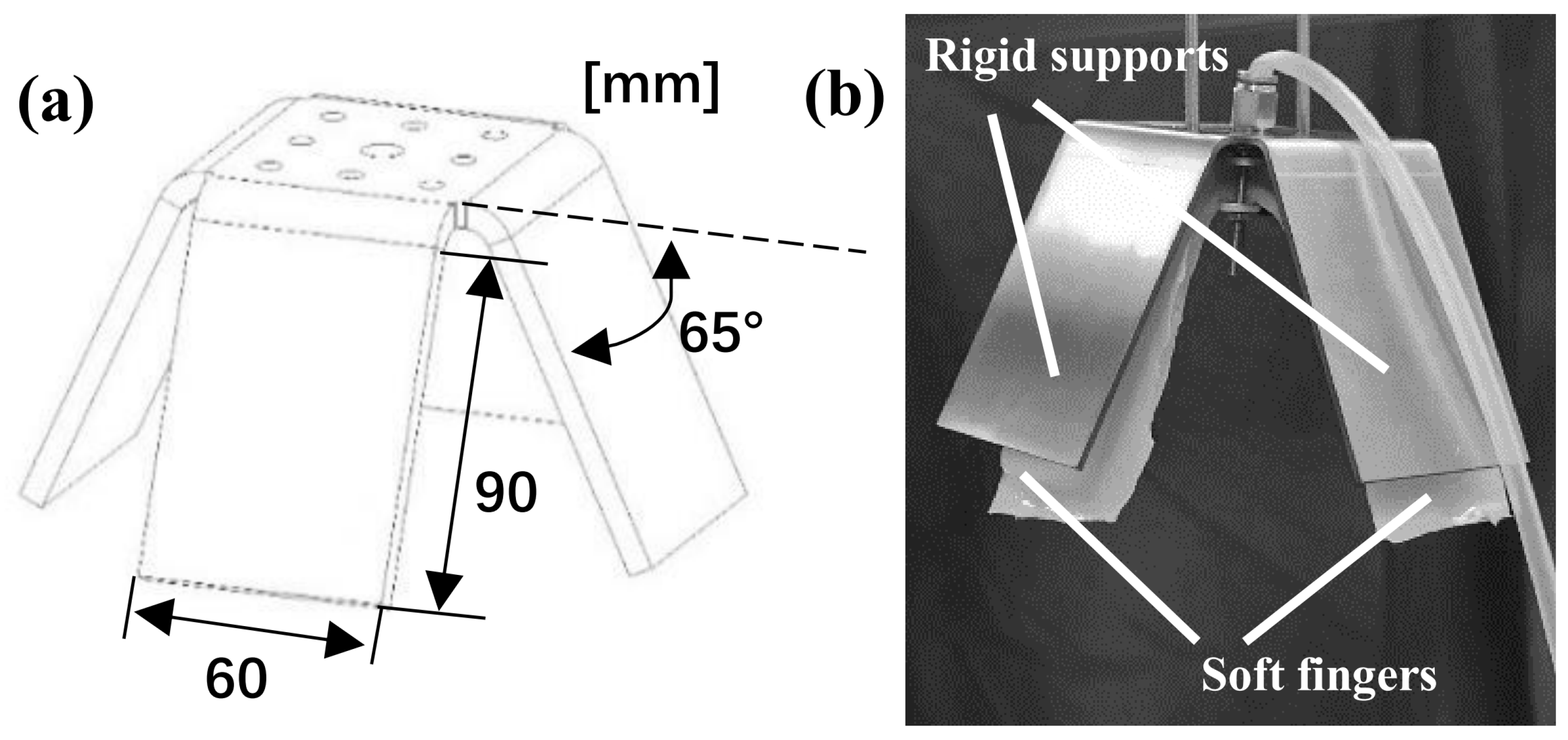
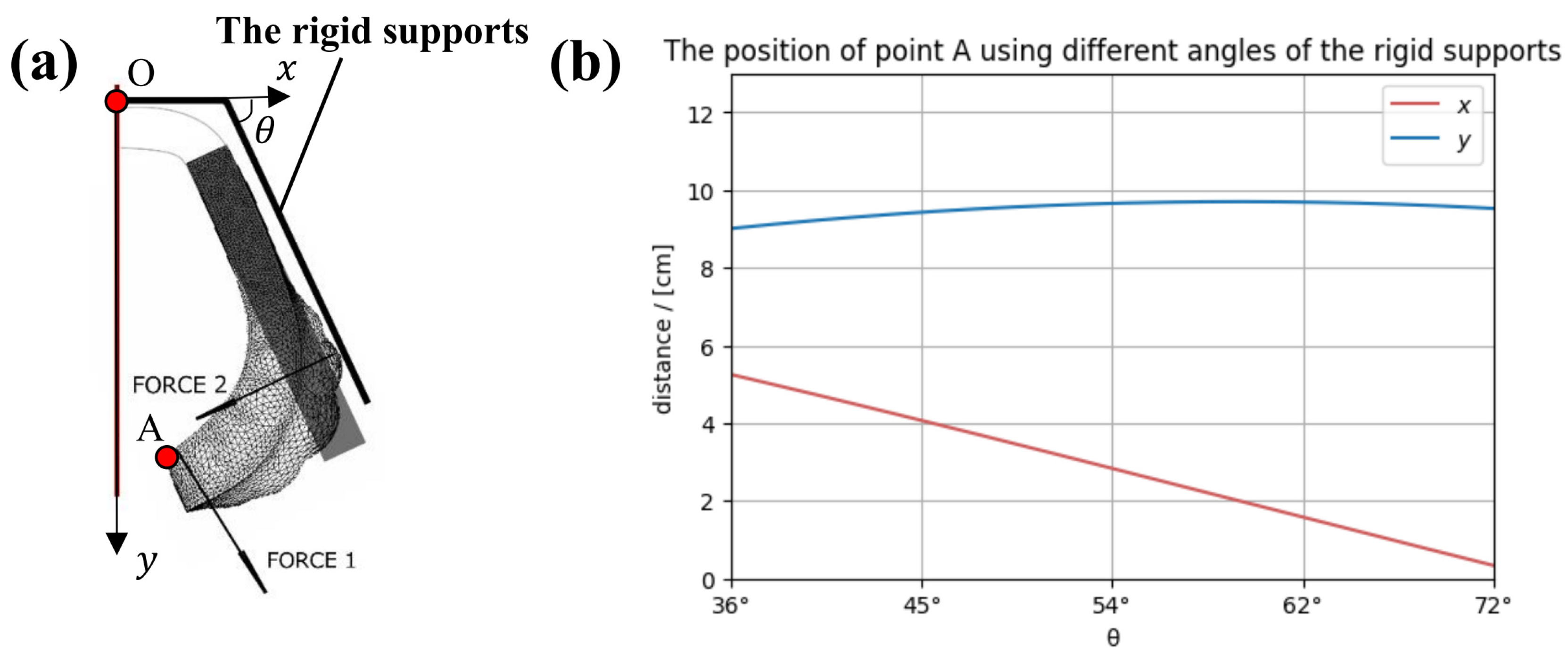
3.2. Rigid Supports
Rigid supports are applied to the soft gripper in order to achieve wide-range bending more easily. The rigid metal support affects the inflation soft “tail” part (
Figure 3(b1)), although not as much to as the “head” part (
Figure 3(b1)). The center of the rigid supports (
Figure 4a, Point O) is selected as the original point. Point A (the red dot in
Figure 4a) indicates the position of the “tail” part of the finger.
is the angle between the
x-axis and the rigid supports. The movements of point A are indicated along the x and y directions in
Figure 4b.
The curves in
Figure 4b show that the value of x decreases as the angle increases, which can better help close the fingers to grab items more tightly, but the maximum dimension the gripper can grasp decreases. Therefore, 65 degrees is selected as the angle of the designed rigid supports, which can better help close the fingers and still grab items with a maximum dimension of 8 cm in diameter. The designed rigid supports with 65 degrees can make the gripper achieve wide-range bending. Force analyses are performed on soft fingers with/without rigid supports. Without the rigid supports, objects are lifted mainly by friction provided by the soft fingers; the governing equation is as follows:
where
is the friction coefficient, which depends on the objects and the silicones, and
is the fingertip force, which is hard to enhance in high air pressure. When the air pressure becomes higher, the fingers expand like balloons but slightly increase the fingertip force, so the friction is hard to enhance in high air pressure. With the help of the rigid supports, objects are lifted mainly by the support force, which can be greatly enhanced in high air pressure due to the space limitation when the fingers expand like balloons. Rigid supports provide support force (
Figure 4a, Force 2), which generates an inward torque to resist the outward torque generated by the grasped object (
Figure 4a, Force 1). Therefore, soft fingers with rigid supports are able to grab items in smaller deformation.
3.3. Bending Performance Comparison
The bending curve is affected by the variable hardness of the silicones and the rigid supports, as shown in
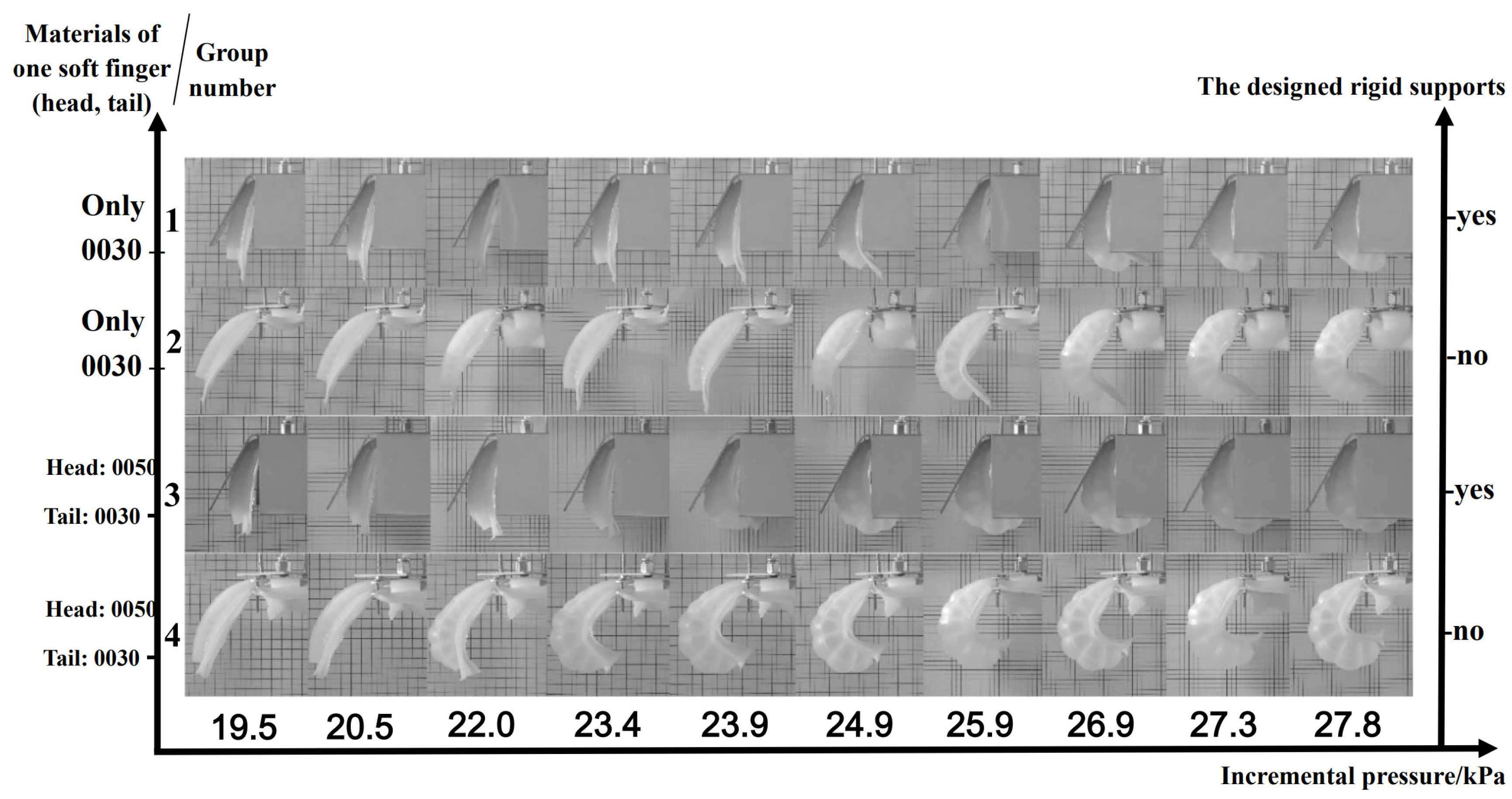
Figure 5. The bending performance is compared under the same incremental pressure.
Grippers with different distributions of silicones and with/without rigid supports are all tested in this experiment (
Figure 5).
Four groups of grippers are compared under the same incremental pressure. In the same incremental pressure, the bending angles of the soft grippers with the rigid supports are all larger than those without the rigid supports, which shows better adaptive grasping ability. Under the constraints of the rigid supports, the soft grippers are able to bend in a wider range of angles more quickly than those without the rigid supports. In addition, the deformation curvature of the gripper will be limited to a proper range by the rigid supports, which will not be much greater than the diameter of the objects.
The soft finger applied two types of silicone in different parts (
Figure 5; groups 3 and 4) and found that the bending at the end of the finger was larger than that of the finger only applying 0030 or 0050 (
Figure 5; groups 1 and 2), which makes the grasping more adaptive.
3.4. Lifting Force Measurement
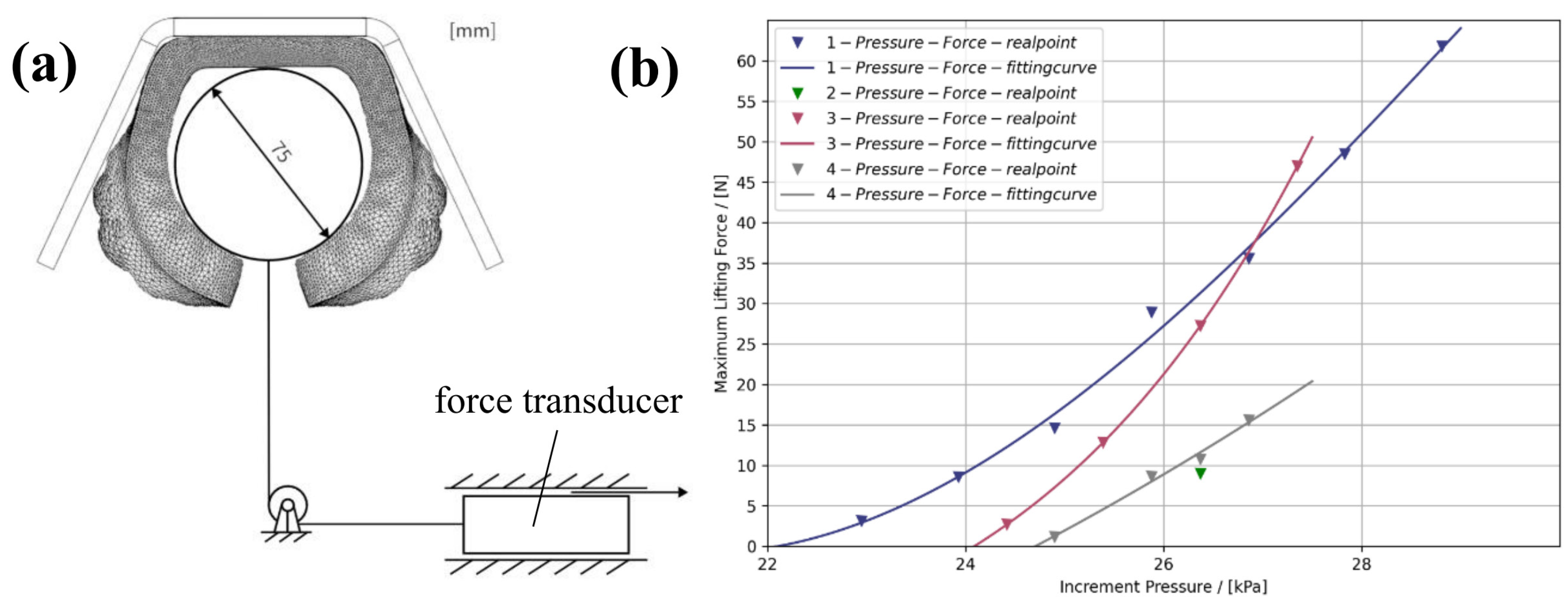
The experimental setup is depicted in
Figure 6a. The soft robotic gripper grasps a lightweight spherical object (55 g; 75 mm in diameter) to which a thin rope is tied. The force transducer is moved downward manually at a slow speed until the gripper fails to grasp the object. The maximum lifting force under a certain pressure is the maximum force measured by the force transducer plus the weight of the spherical object.
Grippers with different distributions of silicones and with or without the rigid supports are all tested in this experiment (
Figure 6).
Comparing groups 3 and 4, the rigid supports increase the lifting force of the original soft gripper without the rigid supports by 152.4% in the same incremental pressure (26.4 kPa), and the level of performance improvement will be higher when the incremental pressure is higher. In general, the lifting force is reinforced by 150 ± 20% in about 26.5 kPa. As depicted in
Figure 6, the maximum lifting force of the soft grippers with the designed rigid supports (groups 1 and 3) is larger than the soft grippers without the designed rigid supports (groups 2 and 4), which indicates that the designed rigid supports can improve the grasping performance in the same incremental pressure to a greater extent.
Comparing groups 1 and 3 at low incremental pressure (below 27 kPa), the pure silicone gripper (group 1) exhibits better gripping ability. When the grippers grip light objects (below 3 kg) at low incremental pressure, objects are lifted mainly by friction. The chambers near the center of the pure silicone gripper expand more than that of the hybrid silicone gripper (group 3), resulting in better gripping ability under the constraint of rigid supports. At high incremental pressure (over 27 kPa), the hybrid silicone gripper (group 3) exhibits better gripping ability. When the grippers grip heavy objects (over 4 kg) at high incremental pressure, the objects are lifted mainly by the support force. And the deformation at the end of the hybrid silicone gripper (group 3) is greater, providing greater support, thus demonstrating better grasping ability.
With the help of the rigid supports, soft grippers (groups 1 and 3) all show excellent heavy items grasping ability. The soft robotic gripper coupling with rigid supports can grasp items with large weights requiring low incremental pressure (object: about 75 mm in diameter, below 5 kg; pressure requirement: below 30 kPa).
4. Discussion
4.1. Grasping Objects Test
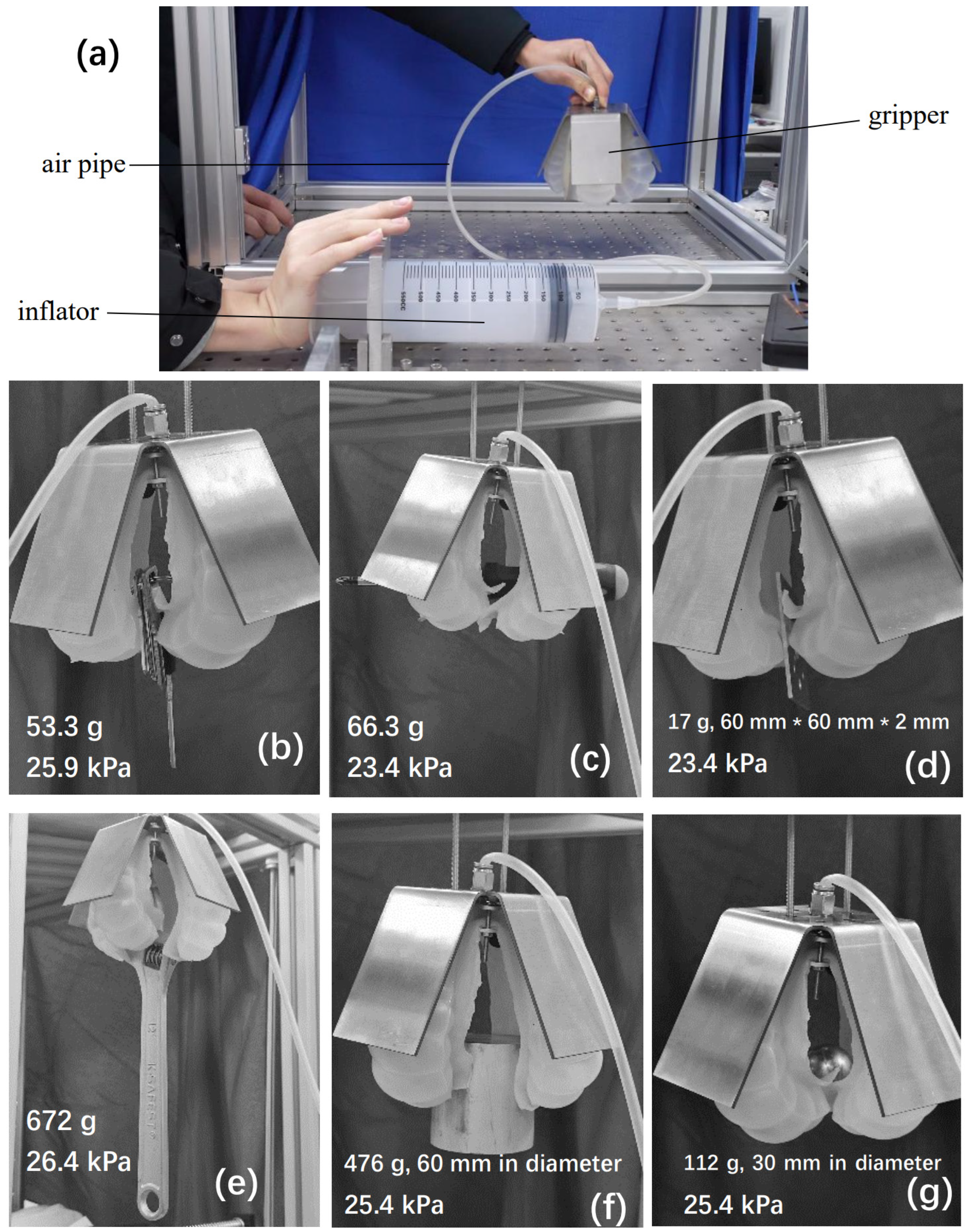
The designed soft robotic gripper is tested by grasping various objects to evaluate its grasping ability. The experimental setup is depicted in
Figure 7a. When the inflator is pushed, the pressure in the air chamber increases. The experimental process can be considered as an isothermal process, and the incremental air pressure equation is as follows:
where
is the atmosphere pressure during the experiment process,
is the original air volume, and
is the air volume after the compression. The grasped items and the minimum incremental pressure for their grasping are listed in
Figure 7. The designed soft robotic gripper shows a talent to grasp items with special shapes or large weights, whose incremental pressure is all below 30 kPa, while the soft gripper without the rigid supports fails to grasp any items listed below. The video of the testing process is provided in Video 1.
Although the proposed soft gripper can only grasp objects below 80 mm in diameter, the grasping objects test results show that a soft robotic gripper can grasp different shapes of objects adaptively without requiring a complicated control algorithm.
4.2. Comparison with Other Soft Grippers
The properties of the proposed gripper are listed below in
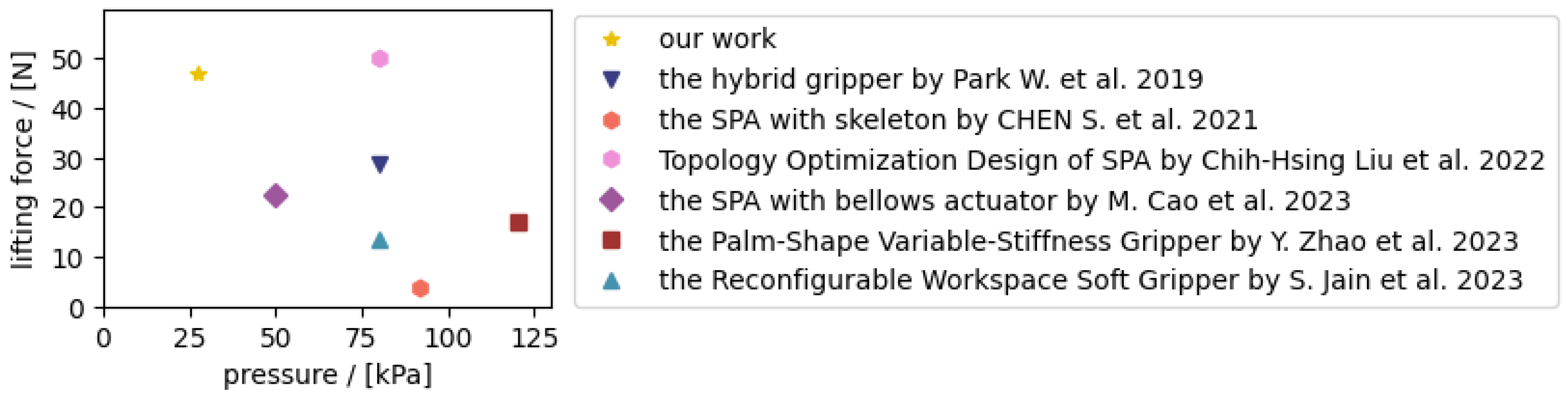
Table 2.
Figure 8 is the comparison of lifting force between the previous SPA studies and the proposed gripper. The gripper of Park Wookeun et al. demanded 80 kPa to reach a lifting force of 28.7 N [
3]. The gripper designed by Miaolong Cao et al. needed 50 kPa to reach a lifting force of 22.53 N [
20]. The 3D-printed variable stiffness gripper of Y. Zhao et al. required 120 kPa for the soft actuators and −90 kPa for the variable stiffness structures to reach a lifting force of 17 N [
21]. The proposed soft gripper with rigid supports can reach a lifting force of 47 N in 27.3 kPa.
Soft grippers, which are made by the proposed scheme, have a wide range of applications across various fields. These grippers are designed to adapt to different object shapes and increase the grasping force, allowing them to operate effectively in diverse environments. One significant application is in electronics assembly, where soft grippers effortlessly grasp and handle electronic components such as batteries and circuit boards for automated assembly processes. They also find utility in underwater maintenance tasks, such as repairing oil wells or manipulating fishing nets. In the medical field, soft grippers play a vital role in operating rooms by securely gripping surgical instruments or medication bottles. Logistics operations benefit greatly from their versatility, as soft grippers can handle packages of various sizes, thereby improving overall efficiency. Moreover, soft grippers have proven invaluable in space exploration, enabling spacecraft maintenance and satellite manipulation. In agriculture, they assist in tasks such as fruit picking or grain harvesting by adapting to different shapes. Construction projects also benefit from soft grippers for handling construction materials like stones or wood. Overall, these soft grippers demonstrate promising potential and significantly contribute to enhancing work efficiency and overcoming challenges across diverse industries and scenarios.
5. Conclusions
We fabricated a soft robotic gripper with variable hardness and designed rigid supports to improve the grasping ability of the soft gripper. FEM simulations were conducted to assist in the design of the distribution of the silicones. A bending performance comparison test and lifting force measurement test were conducted to verify the bending curve design and the rigid supports design. The rigid supports increase the lifting force of the original soft gripper without the rigid supports by 150 ± 20% in the same incremental pressure (26 kPa), and the level of performance improvement will be higher when the incremental pressure is higher. The soft robotic gripper coupled with rigid supports can adaptively grasp items with special shapes or large masses requiring low incremental pressure (object: about 75 mm in diameter, below 5 kg; pressure requirement: below 30 kPa) without the requirement of other complicated control algorithms like conventional rigid robotic grippers. In comparison with the previous soft gripper studies [
3,
9,
10], the proposed soft gripper exhibits an excellent talent for grasping objects above 5 kg. In other words, the proposed soft gripper can grasp the same objects at lower incremental pressure. In terms of all varieties of existing soft grippers, what most of the research focused on turned out to be aerodynamic structure and materials. We paid close attention to the following question: “How can the efficiency of the gripper’s grasping ability at the same pressure condition be improved?” Here are our solutions according to the paper. (1) The combined use of materials with different properties and a rational material layout can significantly improve the deformation situation of the gripper by more than four times better than a single use of the same material in variance of relative curvature value. (2) We propose a solution, which turns out to be the usage of a rigid structure to reduce the deformation of grabbing an item. In some way, the reduction in deformation means better efficiency.
Although the current rigid supports can improve the grasping performance to a greater extent, they also limit the size of the grasping object (must be smaller than in diameter). Therefore, future work will be carried out to make the rigid supports deformable of their bending angle, which allows the gripper to grasp larger sizes of objects.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}