
Deep Learning and Autonomous Vehicles: Strategic Themes, Applications, and Research Agenda Using SciMAT and Content-Centric Analysis, a Systematic Review

 , ,
, ,  , and
, and
Abstract
:1. Introduction
- RQ1: What are the strategic themes of DL and AVs?
- RQ2: What are the trends and opportunities related to DL-AV for researchers and practitioners?
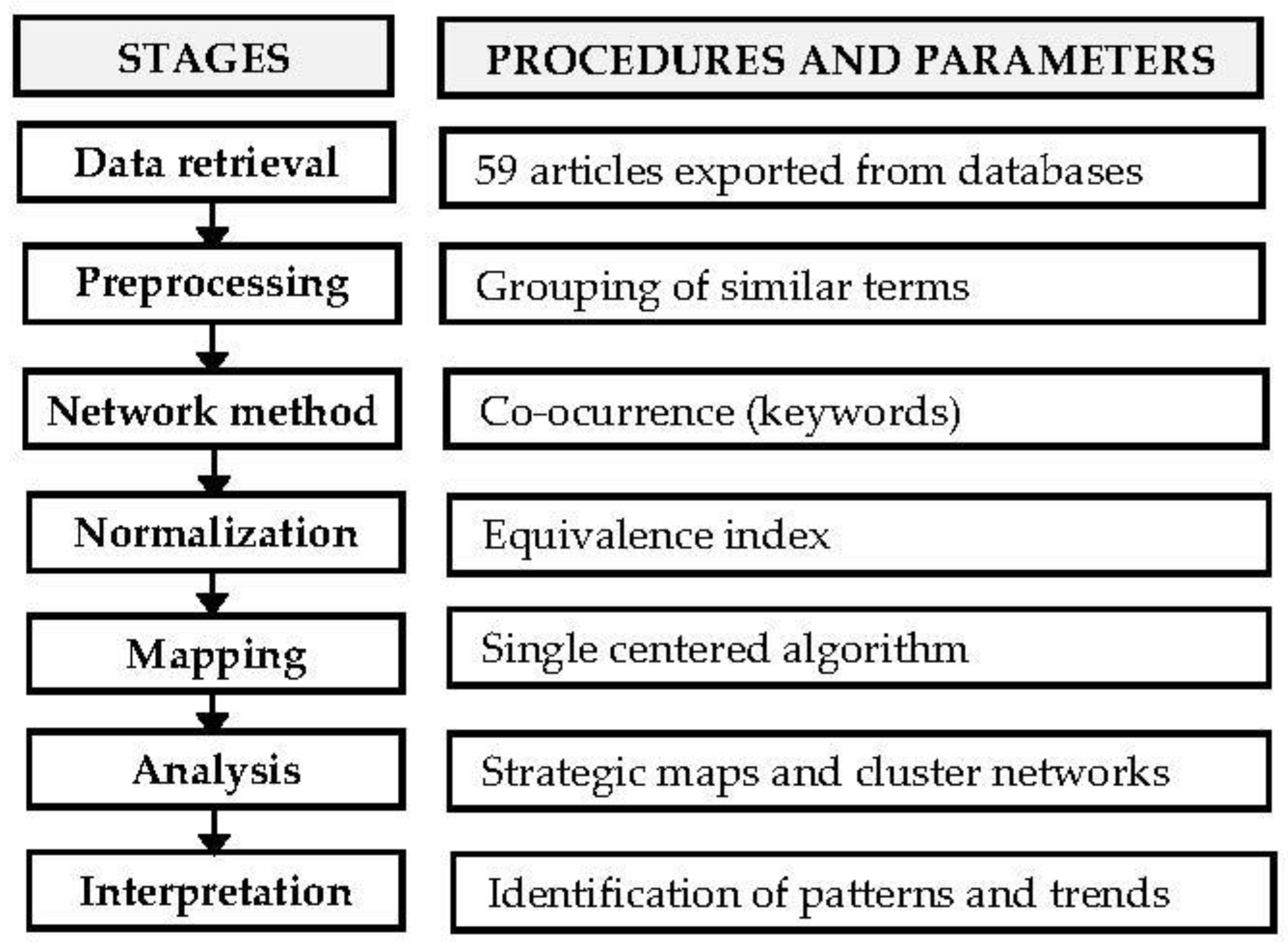
2. Materials and Methods
2.1. Research Protocol
2.2. Science Mapping Analysis Tool (SciMAT) Application
2.3. Content-Centric Analysis
3. Results and Discussion
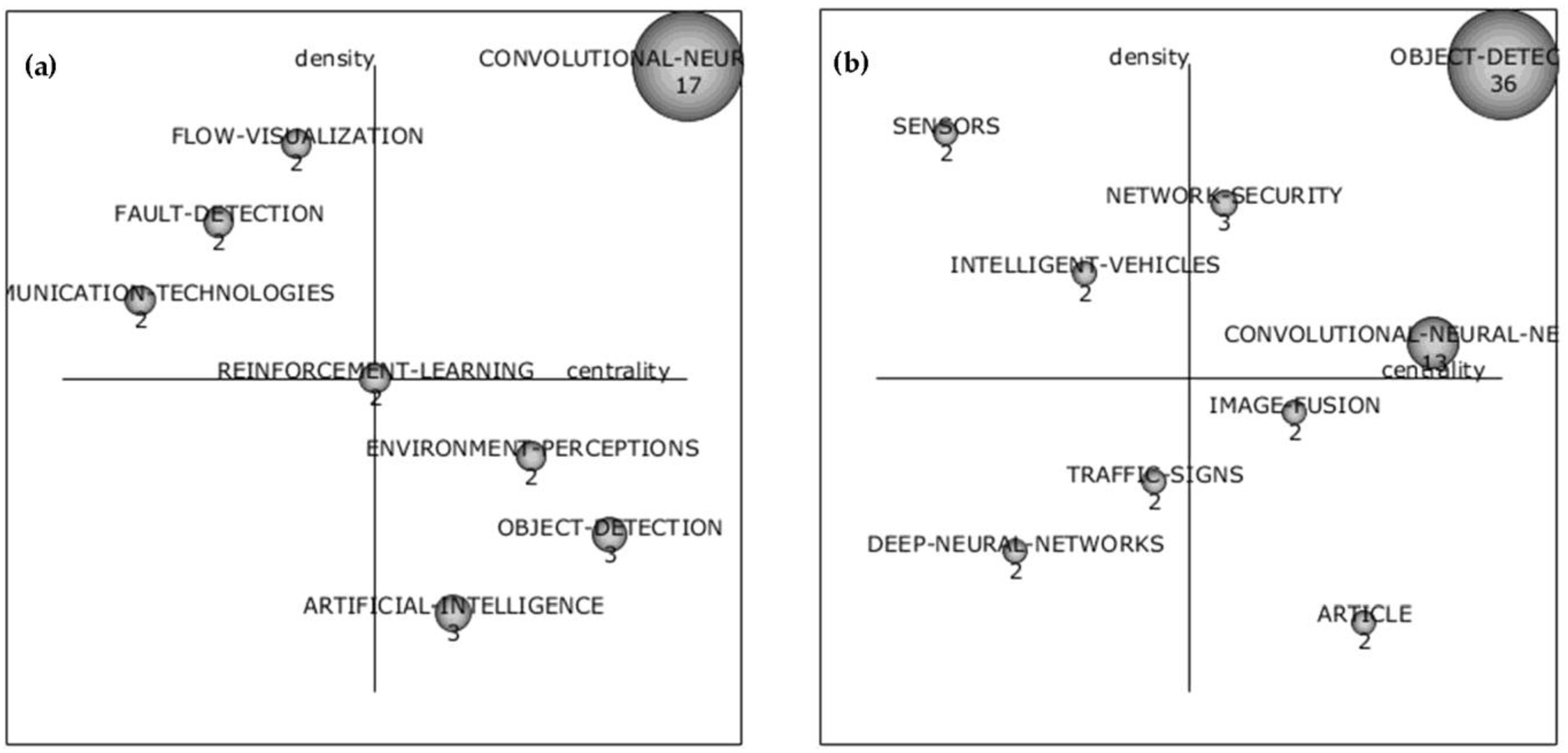
3.1. Strategic Diagrams
3.2. Cluster Networks
3.3. Content-Based Thematic Analysis
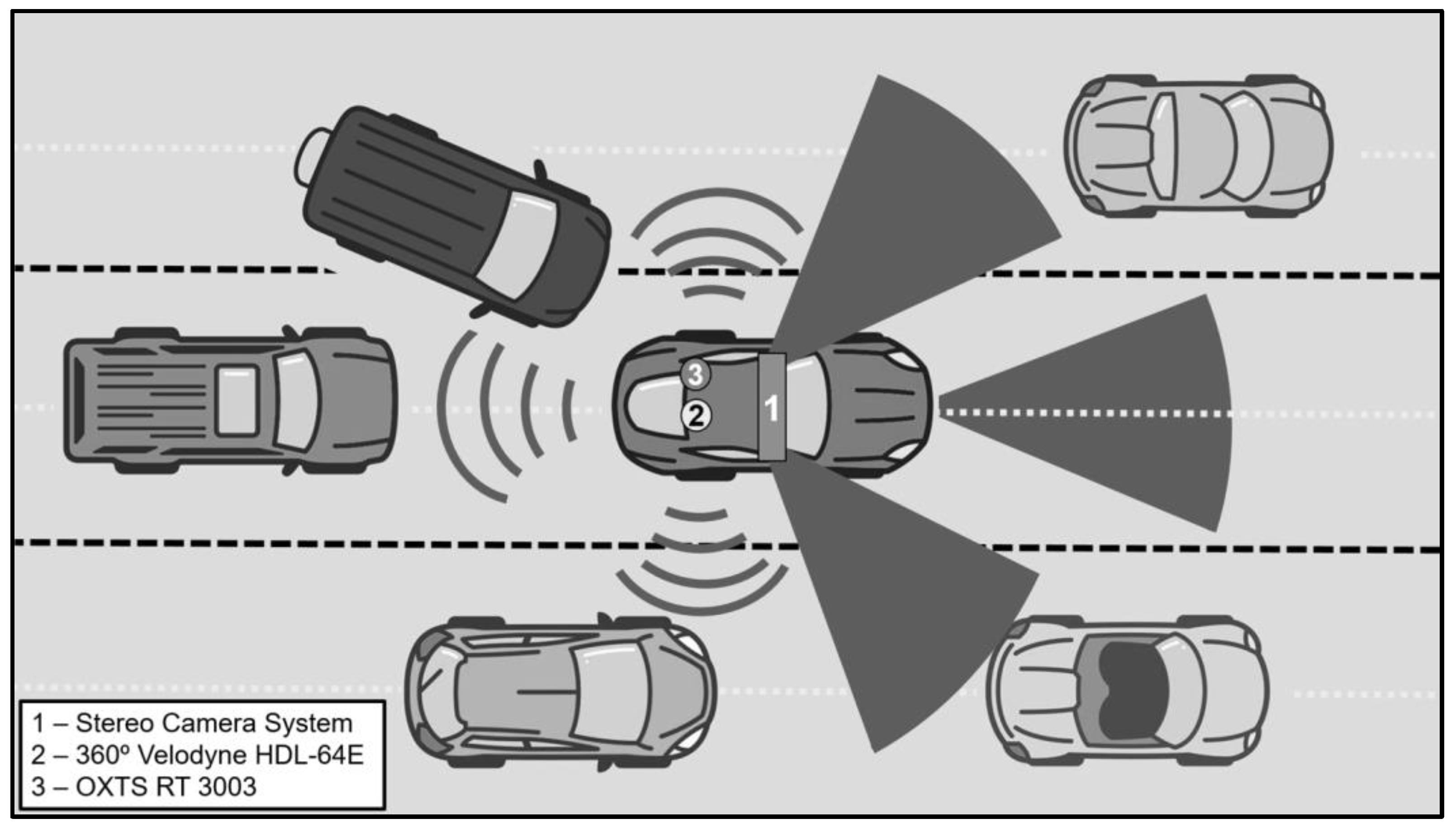
3.3.1. DL Applications in AV Project Design
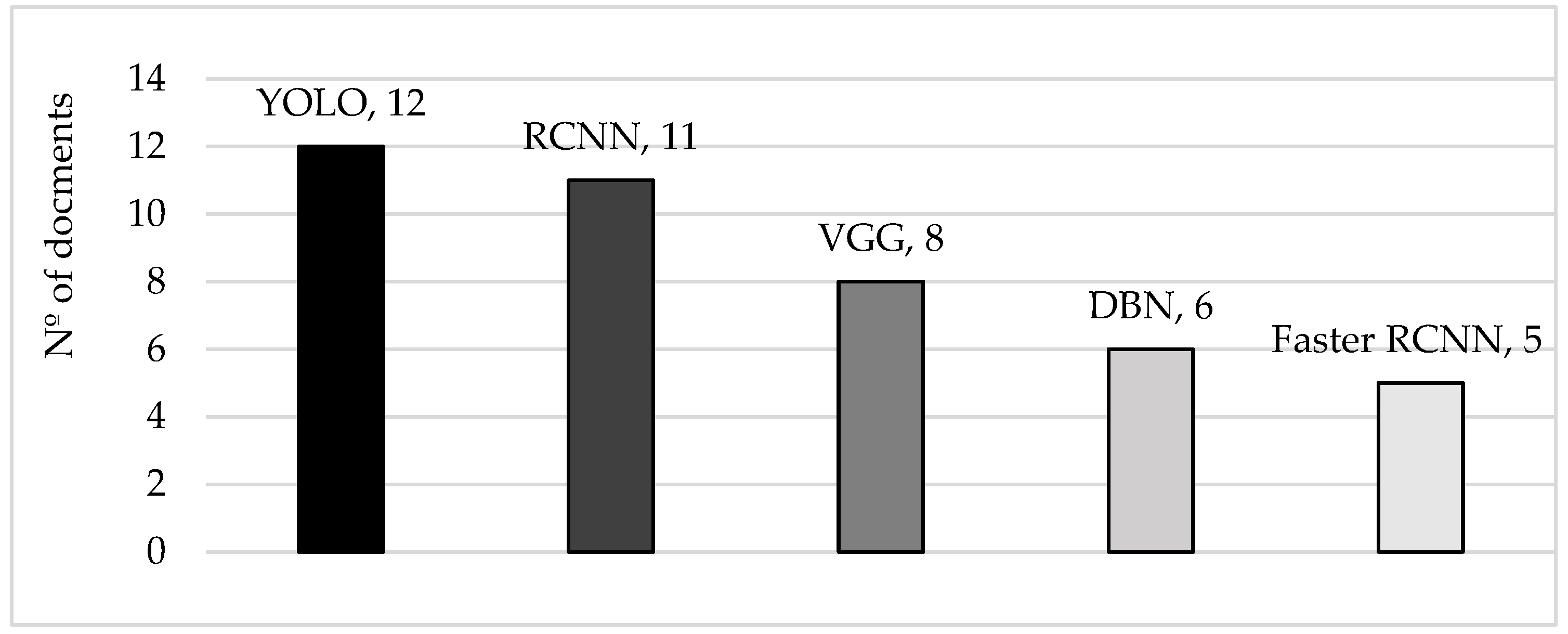
3.3.2. Neural Networks and AI Models Used in AVs
3.3.3. Transdisciplinary Themes in DL-AV Research
- Cybersecurity: Khan et al. [64] and Deng et al. [48] concentrated on AI models that can aid in the detection of AV computational system attacks. Furthermore, Jiang et al. [65] investigated how attacks on AVs are carried out by experimentally replicating some scenarios. One possible attack is on the interaction of corrupted data in vehicle model training, so that the AV model is trained with “poisoned” data, causing it to make errors in actual decisions.
3.4. Research Agenda Proposal and Future Perspectives
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nascimento, A.M.; Vismari, L.F.; Molina, C.B.S.T.; Cugnasca, P.S.; Camargo, J.B.; De Almeida, J.R.; Inam, R.; Fersman, E.; Marquezini, M.V.; Hata, A.Y. A Systematic Literature Review about the Impact of Artificial Intelligence on Autonomous Vehicle Safety. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4928–4946. [Google Scholar] [CrossRef] [Green Version]
- World Health Organization. Road Traffic Injuries; World Health Organization: Geneva, Switzerland, 2022. [Google Scholar]
- Bai, X.; Chen, H.; Oliver, B.G. The Health Effects of Traffic-Related Air Pollution: A Review Focused the Health Effects of Going Green. Chemosphere 2022, 289, 133082. [Google Scholar] [CrossRef]
- Pant, P.; Harrison, R.M. Estimation of the Contribution of Road Traffic Emissions to Particulate Matter Concentrations from Field Measurements: A Review. Atmos. Environ. 2013, 77, 78–97. [Google Scholar] [CrossRef]
- US Department of Transportation—National Highway Traffic Safety Administration. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; US Department of Transportation—National Highway Traffic Safety Administration: Washington, NY, USA, 2018.
- Muhammad, K.; Ullah, A.; Lloret, J.; Del Ser, J.; De Albuquerque, V.H.C. Deep Learning for Safe Autonomous Driving: Current Challenges and Future Directions. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4316–4336. [Google Scholar] [CrossRef]
- Parekh, D.; Poddar, N.; Rajpurkar, A.; Chahal, M.; Kumar, N.; Joshi, G.P.; Cho, W. A Review on Autonomous Vehicles: Progress, Methods and Challenges. Electronics 2022, 11, 2162. [Google Scholar] [CrossRef]
- Kostrzewski, M.; Marczewska, M.; Uden, L. The Internet of Vehicles and Sustainability—Reflections on Environmental, Social, and Corporate Governance. Energies 2023, 16, 3208. [Google Scholar] [CrossRef]
- Jebamikyous, H.H.; Kashef, R. Autonomous Vehicles Perception (AVP) Using Deep Learning: Modeling, Assessment, and Challenges. IEEE Access 2022, 10, 10523–10535. [Google Scholar] [CrossRef]
- Pavel, M.I.; Tan, S.Y.; Abdullah, A. Vision-Based Autonomous Vehicle Systems Based on Deep Learning: A Systematic Literature Review. Appl. Sci. 2022, 12, 6831. [Google Scholar] [CrossRef]
- Fayyad, J.; Jaradat, M.A.; Gruyer, D.; Najjaran, H. Deep Learning Sensor Fusion for Autonomous Vehicle Perception and Localization: A Review. Sensors 2020, 20, 4220. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O.Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep Learning-Based Vehicle Behavior Prediction for Autonomous Driving Applications: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 33–47. [Google Scholar] [CrossRef]
- Cui, Y.; Chen, R.; Chu, W.; Chen, L.; Tian, D.; Li, Y.; Cao, D. Deep Learning for Image and Point Cloud Fusion in Autonomous Driving: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 722–739. [Google Scholar] [CrossRef]
- Donthu, N.; Kumar, S.; Mukherjee, D.; Pandey, N.; Lim, W.M. How to Conduct a Bibliometric Analysis: An Overview and Guidelines. J. Bus. Res. 2021, 133, 285–296. [Google Scholar] [CrossRef]
- Baas, J.; Schotten, M.; Plume, A.; Côté, G.; Karimi, R. Scopus as a Curated, High-Quality Bibliometric Data Source for Academic Research in Quantitative Science Studies. Quant. Sci. Stud. 2020, 1, 377–386. [Google Scholar] [CrossRef]
- Bolis, I.; Sigahi, T.F.A.C.; Thatcher, A.; Saltorato, P.; Morioka, S.N. Contribution of Ergonomics and Human Factors to Sustainable Development: A Systematic Literature Review. Ergonomics 2023, 66, 303–321. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 Statement: An Updated Guideline for Reporting Systematic Reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef]
- Elo, S.; Kyngäs, H. The Qualitative Content Analysis Process. J. Adv. Nurs. 2008, 62, 107–115. [Google Scholar] [CrossRef] [PubMed]
- Tranfield, D.; Denyer, D.; Smart, P. Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Cobo, M.J.; López-Herrera, A.G.; Herrera-Viedma, E.; Herrera, F. SciMAT: A New Science Mapping Analysis Software Tool. J. Am. Soc. Inf. Sci. Technol. 2012, 63, 1609–1630. [Google Scholar] [CrossRef]
- Furstenau, L.B.; Sott, M.K.; Kipper, L.M.; Machado, E.L.; Lopez-Robles, J.R.; Dohan, M.S.; Cobo, M.J.; Zahid, A.; Abbasi, Q.H.; Imran, M.A. Link Between Sustainability and Industry 4.0: Trends, Challenges and New Perspectives. IEEE Access 2020, 8, 140079–140096. [Google Scholar] [CrossRef]
- Furstenau, L.B.; Rabaioli, B.; Sott, M.K.; Cossul, D.; Bender, M.S.; Farina, E.M.J.D.M.; Filho, F.N.B.; Severo, P.P.; Dohan, M.S.; Bragazzi, N.L. A Bibliometric Network Analysis of Coronavirus during the First Eight Months of COVID-19 in 2020. Int. J. Environ. Res. Public Health 2021, 18, 952. [Google Scholar] [CrossRef]
- Gibbin, R.V.; Sigahi, T.F.A.C.; Pinto, J.d.S.; Rampasso, I.S.; Anholon, R. Thematic Evolution and Trends Linking Sustainability and Project Management: Scientific Mapping Using SciMAT. J. Clean. Prod. 2023, 414, 137753. [Google Scholar] [CrossRef]
- López-Robles, J.R.; Otegi-Olaso, J.R.; Porto Gómez, I.; Cobo, M.J. 30 Years of Intelligence Models in Management and Business: A Bibliometric Review. Int. J. Inf. Manag. 2019, 48, 22–38. [Google Scholar] [CrossRef]
- Santana, M.; Cobo, M.J. What Is the Future of Work? A Science Mapping Analysis. Eur. Manag. J. 2020, 38, 846–862. [Google Scholar] [CrossRef]
- Cobo, M.J.; Martínez, M.A.; Gutiérrez-Salcedo, M.; Fujita, H.; Herrera-Viedma, E. 25 Years at Knowledge-Based Systems: A Bibliometric Analysis. Knowledge-Based Syst. 2015, 80, 3–13. [Google Scholar] [CrossRef]
- Ghobakhloo, M.; Iranmanesh, M.; Tseng, M.-L.; Grybauskas, A.; Stefanini, A.; Amran, A. Behind the Definition of Industry 5.0: A Systematic Review of Technologies, Principles, Components, and Values. J. Ind. Prod. Eng. 2023, 1–16. [Google Scholar] [CrossRef]
- Bardin, L. Content Analysis; Edições 70: Rio de Janeiro, Brazil, 2015. [Google Scholar]
- Fujiyoshi, H.; Hirakawa, T.; Yamashita, T. Deep Learning-Based Image Recognition for Autonomous Driving. IATSS Res. 2019, 43, 244–252. [Google Scholar] [CrossRef]
- Wen, L.H.; Jo, K.H. Deep Learning-Based Perception Systems for Autonomous Driving: A Comprehensive Survey. Neurocomputing 2022, 489, 255–270. [Google Scholar] [CrossRef]
- Li, Y.; Ma, L.; Zhong, Z.; Liu, F.; Chapman, M.A.; Cao, D.; Li, J. Deep Learning for LiDAR Point Clouds in Autonomous Driving: A Review. IEEE Trans. Neural Networks Learn. Syst. 2021, 32, 3412–3432. [Google Scholar] [CrossRef] [PubMed]
- Mekala, M.S.; Park, W.; Dhiman, G.; Srivastava, G.; Park, J.H.; Jung, H.Y. Deep Learning Inspired Object Consolidation Approaches Using LiDAR Data for Autonomous Driving: A Review. Arch. Comput. Methods Eng. 2022, 29, 2579–2599. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Zhao, D.; Zhang, Q.; Chen, Y. Reinforcement Learning and Deep Learning Based Lateral Control for Autonomous Driving [Application Notes]. IEEE Comput. Intell. Mag. 2019, 14, 83–98. [Google Scholar] [CrossRef]
- Topple, J.M.; Fawcett, J.A. MiNet: Efficient Deep Learning Automatic Target Recognition for Small Autonomous Vehicles. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1014–1018. [Google Scholar] [CrossRef]
- Chuah, W.; Tennakoon, R.; Hoseinnezhad, R.; Bab-Hadiashar, A. Deep Learning-Based Incorporation of Planar Constraints for Robust Stereo Depth Estimation in Autonomous Vehicle Applications. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6654–6665. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Region-Based Convolutional Networks for Accurate Object Detection and Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 142–158. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. In Computer Vision—Lecture Notes in Computer Science; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Cham, Switzerland, 2014; pp. 346–361. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Proceedings of the 28th International Conference on Neural Information Processing Systems, Sanur, Bali, Indonesia, 4 June 2015; pp. 91–99. [Google Scholar]
- Lin, T.-Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 936–944. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—Lecture Notes in Computer Science; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef] [Green Version]
- Zang, D.; Wei, Z.; Bao, M.; Cheng, J.; Zhang, D.; Tang, K.; Li, X. Deep Learning–Based Traffic Sign Recognition for Unmanned Autonomous Vehicles. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 497–505. [Google Scholar] [CrossRef]
- Pendleton, S.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.; Rus, D.; Ang, M. Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef] [Green Version]
- Boukerche, A.; Sha, M. Design Guidelines on Deep Learning-Based Pedestrian Detection Methods for Supporting Autonomous Vehicles. ACM Comput. Surv. 2021, 54, 1–36. [Google Scholar] [CrossRef]
- Parmar, Y.; Natarajan, S.; Sobha, G. Deeprange: Deep-Learning-Based Object Detection and Ranging in Autonomous Driving. IET Intell. Transp. Syst. 2019, 13, 1256–1264. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, T.; Lou, G.; Zheng, X.; Jin, J.; Han, Q.L. Deep Learning-Based Autonomous Driving Systems: A Survey of Attacks and Defenses. IEEE Trans. Ind. Inform. 2021, 17, 7897–7912. [Google Scholar] [CrossRef]
- Liang, Z.; Huang, Y. Survey on Deep Learning-Based 3D Object Detection in Autonomous Driving. Trans. Inst. Meas. Control 2022, 45, 761–776. [Google Scholar] [CrossRef]
- Peng, B.; Sun, Q.; Li, S.E.; Kum, D.; Yin, Y.; Wei, J.; Gu, T. End-to-End Autonomous Driving through Dueling Double Deep Q-Network. Automot. Innov. 2021, 4, 328–337. [Google Scholar] [CrossRef]
- Natan, O.; Miura, J. End-to-End Autonomous Driving with Semantic Depth Cloud Mapping and Multi-Agent. IEEE Trans. Intell. Veh. 2022, 8, 557–571. [Google Scholar] [CrossRef]
- Zhang, H.; Bosch, J.; Olsson, H.H. End-to-End Federated Learning for Autonomous Driving Vehicles. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–8. [Google Scholar]
- Tampuu, A.; Matiisen, T.; Semikin, M.; Fishman, D.; Muhammad, N. A Survey of End-to-End Driving: Architectures and Training Methods. IEEE Trans. Neural Networks Learn. Syst. 2022, 33, 1364–1384. [Google Scholar] [CrossRef]
- Wang, F.; Tax, D.M.J. Survey on the Attention Based RNN Model and Its Applications in Computer Vision. arXiv 2016, arXiv:1601.06823. [Google Scholar]
- Lechner, M.; Hasani, R.; Amini, A.; Henzinger, T.A.; Rus, D.; Grosu, R. Neural Circuit Policies Enabling Auditable Autonomy. Nat. Mach. Intell. 2020, 2, 642–652. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are We Ready for Autonomous Driving? In The KITTI Vision Benchmark Suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 3354–3361. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. In Proceedings of the 31st Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; NIPS: Long Beach, CA, USA, 2017; pp. 1–11. [Google Scholar]
- Wan, L.; Sun, Y.; Sun, L.; Ning, Z.; Rodrigues, J.J.P.C. Deep Learning Based Autonomous Vehicle Super Resolution DOA Estimation for Safety Driving. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4301–4315. [Google Scholar] [CrossRef]
- Vega, A.; Buyuktosunoglu, A.; Callegaro, D.; Levorato, M.; Bose, P. Cloud-Backed Mobile Cognition: Power-Efficient Deep Learning in the Autonomous Vehicle Era. Computing 2022, 104, 461–479. [Google Scholar] [CrossRef]
- Balasekaran, G.; Jayakumar, S.; Pérez de Prado, R. An Intelligent Task Scheduling Mechanism for Autonomous Vehicles via Deep Learning. Energies 2021, 14, 1788. [Google Scholar] [CrossRef]
- Thiele-Evans, L.; Pepper, B.; Zeleznikow, J.; Foster, N.; Sourdin, T. Regulatory Approaches to Managing Artificial Intelligence Systems in Autonomous Vehicles in Australia. Int. J. Law Inf. Technol. 2021, 29, 79–100. [Google Scholar] [CrossRef]
- Ning, H.; Yin, R.; Ullah, A.; Shi, F. A Survey on Hybrid Human-Artificial Intelligence for Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6011–6026. [Google Scholar] [CrossRef]
- Cunneen, M.; Mullins, M.; Murphy, F. Autonomous Vehicles and Embedded Artificial Intelligence: The Challenges of Framing Machine Driving Decisions. Appl. Artif. Intell. 2019, 33, 706–731. [Google Scholar] [CrossRef] [Green Version]
- Khan, I.A.; Moustafa, N.; Pi, D.; Haider, W.; Li, B.; Jolfaei, A. An Enhanced Multi-Stage Deep Learning Framework for Detecting Malicious Activities From Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 25469–25478. [Google Scholar] [CrossRef]
- Jiang, W.; Li, H.; Liu, S.; Luo, X.; Lu, R. Poisoning and Evasion Attacks against Deep Learning Algorithms in Autonomous Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4439–4449. [Google Scholar] [CrossRef]
- Grigorescu, S.; Trasnea, B.; Cocias, T.; Macesanu, G. A Survey of Deep Learning Techniques for Autonomous Driving. J. F. Robot. 2020, 37, 362–386. [Google Scholar] [CrossRef] [Green Version]
- Kuutti, S.; Bowden, R.; Jin, Y.; Barber, P.; Fallah, S. A Survey of Deep Learning Applications to Autonomous Vehicle Control. IEEE Trans. Intell. Transp. Syst. 2021, 22, 712–733. [Google Scholar] [CrossRef]
- Al-Qizwini, M.; Barjasteh, I.; Al-Qassab, H.; Radha, H. Deep Learning Algorithm for Autonomous Driving Using GoogLeNet. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 89–96. [Google Scholar]
- Iftikhar, S.; Zhang, Z.; Asim, M.; Muthanna, A.; Koucheryavy, A.; Abd El-Latif, A.A. Deep Learning-Based Pedestrian Detection in Autonomous Vehicles: Substantial Issues and Challenges. Electronics 2022, 11, 3551. [Google Scholar] [CrossRef]
- Miglani, A.; Kumar, N. Deep Learning Models for Traffic Flow Prediction in Autonomous Vehicles: A Review, Solutions, and Challenges. Veh. Commun. 2019, 20, 100184. [Google Scholar] [CrossRef]
- Vishnukumar, H.J.; Butting, B.; Muller, C.; Sax, E. Machine Learning and Deep Neural Network—Artificial Intelligence Core for Lab and Real-World Test and Validation for ADAS and Autonomous Vehicles: AI for Efficient and Quality Test and Validation. In Proceedings of the 2017 Intelligent Systems Conference (IntelliSys), London, UK, 7–8 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 714–721. [Google Scholar]
- Sun, M.; Paek, D.; Kong, S.-H. A Study on Deep Learning Based Lidar Object Detection Neural Networks for Autonomous Driving. Trans. Korean Soc. Automot. Eng. 2022, 30, 635–647. [Google Scholar] [CrossRef]
- Yang, S.; Wang, W.; Liu, C.; Deng, W.; Hedrick, J.K. Feature Analysis and Selection for Training an End-to-End Autonomous Vehicle Controller Using Deep Learning Approach. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1033–1038. [Google Scholar]
- Shi, X.; Wong, Y.D.; Chai, C.; Li, M.Z.-F. An Automated Machine Learning (AutoML) Method of Risk Prediction for Decision-Making of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7145–7154. [Google Scholar] [CrossRef]
- Patel, A.R.; Liggesmeyer, P. Machine Learning Based Dynamic Risk Assessment for Autonomous Vehicles. In Proceedings of the 2021 International Symposium on Computer Science and Intelligent Controls (ISCSIC), Rome, Italy, 12–14 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 73–77. [Google Scholar]
- Kim, H.-U.; Bae, T.-S. Deep Learning-Based GNSS Network-Based Real-Time Kinematic Improvement for Autonomous Ground Vehicle Navigation. J. Sensors 2019, 2019, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Tullu, A.; Endale, B.; Wondosen, A.; Hwang, H.-Y. Machine Learning Approach to Real-Time 3D Path Planning for Autonomous Navigation of Unmanned Aerial Vehicle. Appl. Sci. 2021, 11, 4706. [Google Scholar] [CrossRef]
- Mandal, S.; Biswas, S.; Balas, V.E.; Shaw, R.N.; Ghosh, A. Motion Prediction for Autonomous Vehicles from Lyft Dataset Using Deep Learning. In Proceedings of the 2020 IEEE 5th International Conference on Computing Communication and Automation (ICCCA), Greater Noida, India, 30–31 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 768–773. [Google Scholar]
- Iqbal, S.; Ball, P.; Kamarudin, M.H.; Bradley, A. Simulating Malicious Attacks on VANETs for Connected and Autonomous Vehicle Cybersecurity: A Machine Learning Dataset. In Proceedings of the 2022 13th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 332–337. [Google Scholar]
- Morley, N. Autonomous Vehicle Ethics in Networked Transport Systems: Spatial Cognition Algorithms, Mobility Data Processing Tools, and Deep Learning-Based Sensing Technologies. Contemp. Readings Law Soc. Justice 2022, 14, 82–99. [Google Scholar] [CrossRef]
- Xiao, Y. Application of Machine Learning in Ethical Design of Autonomous Driving Crash Algorithms. Comput. Intell. Neurosci. 2022, 2022. [Google Scholar] [CrossRef] [PubMed]
- Behrends, J.; Basl, J. Trolleys and Autonomous Vehicles: New Foundations for the Ethics of Machine Learning. In Autonomous Vehicle Ethics: The Trolley Problem and Beyond; Oxford University Press: Oxford, UK, 2022; pp. 58–79. [Google Scholar]
- Xu, Y.; Lin, J.; Gao, H.; Li, R.; Jiang, Z.; Yin, Y.; Wu, Y. Machine Learning-Driven APPs Recommendation for Energy Optimization in Green Communication and Networking for Connected and Autonomous Vehicles. IEEE Trans. Green Commun. Netw. 2022, 6, 1543–1552. [Google Scholar] [CrossRef]
- Yu, K.; Lin, L.; Alazab, M.; Tan, L.; Gu, B. Deep Learning-Based Traffic Safety Solution for a Mixture of Autonomous and Manual Vehicles in a 5G-Enabled Intelligent Transportation System. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4337–4347. [Google Scholar] [CrossRef]
- Shafaei, S.; Kugele, S.; Osman, M.H.; Knoll, A. Uncertainty in Machine Learning: A Safety Perspective on Autonomous Driving. In Computer Safety, Reliability, and Security; Gallina, B., Skavhaug, A., Schoitsch, E., Bitsch, F., Eds.; Springer: Cham, Switzerland, 2018; pp. 458–464. [Google Scholar]
- Zhu, Z.; Hu, Z.; Dai, W.; Chen, H.; Lv, Z. Deep Learning for Autonomous Vehicle and Pedestrian Interaction Safety. Saf. Sci. 2022, 145, 105479. [Google Scholar] [CrossRef]
- Adeboye, O.; Dargahi, T.; Babaie, M.; Saraee, M.; Yu, C.-M. DeepClean: A Robust Deep Learning Technique for Autonomous Vehicle Camera Data Privacy. IEEE Access 2022, 10, 124534–124544. [Google Scholar] [CrossRef]
- Yang, S.; Wang, W.; Liu, C.; Deng, W. Scene Understanding in Deep Learning-Based End-to-End Controllers for Autonomous Vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 53–63. [Google Scholar] [CrossRef]
- Chen, X.; Leng, S.; He, J.; Zhou, L. Deep-Learning-Based Intelligent Intervehicle Distance Control for 6G-Enabled Cooperative Autonomous Driving. IEEE Internet Things J. 2021, 8, 15180–15190. [Google Scholar] [CrossRef]
- Sigahi, T.F.A.C.; Rampasso, I.S.; Anholon, R.; Sznelwar, L.I. Classical Paradigms versus Complexity Thinking in Engineering Education: An Essential Discussion in the Education for Sustainable Development. Int. J. Sustain. High. Educ. 2023, 24, 179–192. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topics | Research Questions | References |
|---|---|---|
| DL application in AV project design |
| [66,67] |
| [6,68,69] | |
| [9,12,70] | |
| Neural networks and AI models used in AVs |
| [71,72] |
| [73] | |
| [74,75] | |
| [74,76,77] | |
| [78,79] | |
| [80,81,82] | |
| Transdisciplinary themes in DL-AV |
| [83] |
| [84,85,86] | |
| [79,87] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morooka, F.E.; Junior, A.M.; Sigahi, T.F.A.C.; Pinto, J.d.S.; Rampasso, I.S.; Anholon, R. Deep Learning and Autonomous Vehicles: Strategic Themes, Applications, and Research Agenda Using SciMAT and Content-Centric Analysis, a Systematic Review. Mach. Learn. Knowl. Extr. 2023, 5, 763-781. https://doi.org/10.3390/make5030041
Morooka FE, Junior AM, Sigahi TFAC, Pinto JdS, Rampasso IS, Anholon R. Deep Learning and Autonomous Vehicles: Strategic Themes, Applications, and Research Agenda Using SciMAT and Content-Centric Analysis, a Systematic Review. Machine Learning and Knowledge Extraction. 2023; 5(3):763-781. https://doi.org/10.3390/make5030041
Chicago/Turabian StyleMorooka, Fábio Eid, Adalberto Manoel Junior, Tiago F. A. C. Sigahi, Jefferson de Souza Pinto, Izabela Simon Rampasso, and Rosley Anholon. 2023. "Deep Learning and Autonomous Vehicles: Strategic Themes, Applications, and Research Agenda Using SciMAT and Content-Centric Analysis, a Systematic Review" Machine Learning and Knowledge Extraction 5, no. 3: 763-781. https://doi.org/10.3390/make5030041