

Smart Composite Booms for Solar Sails

 , , ,
, , ,
Abstract
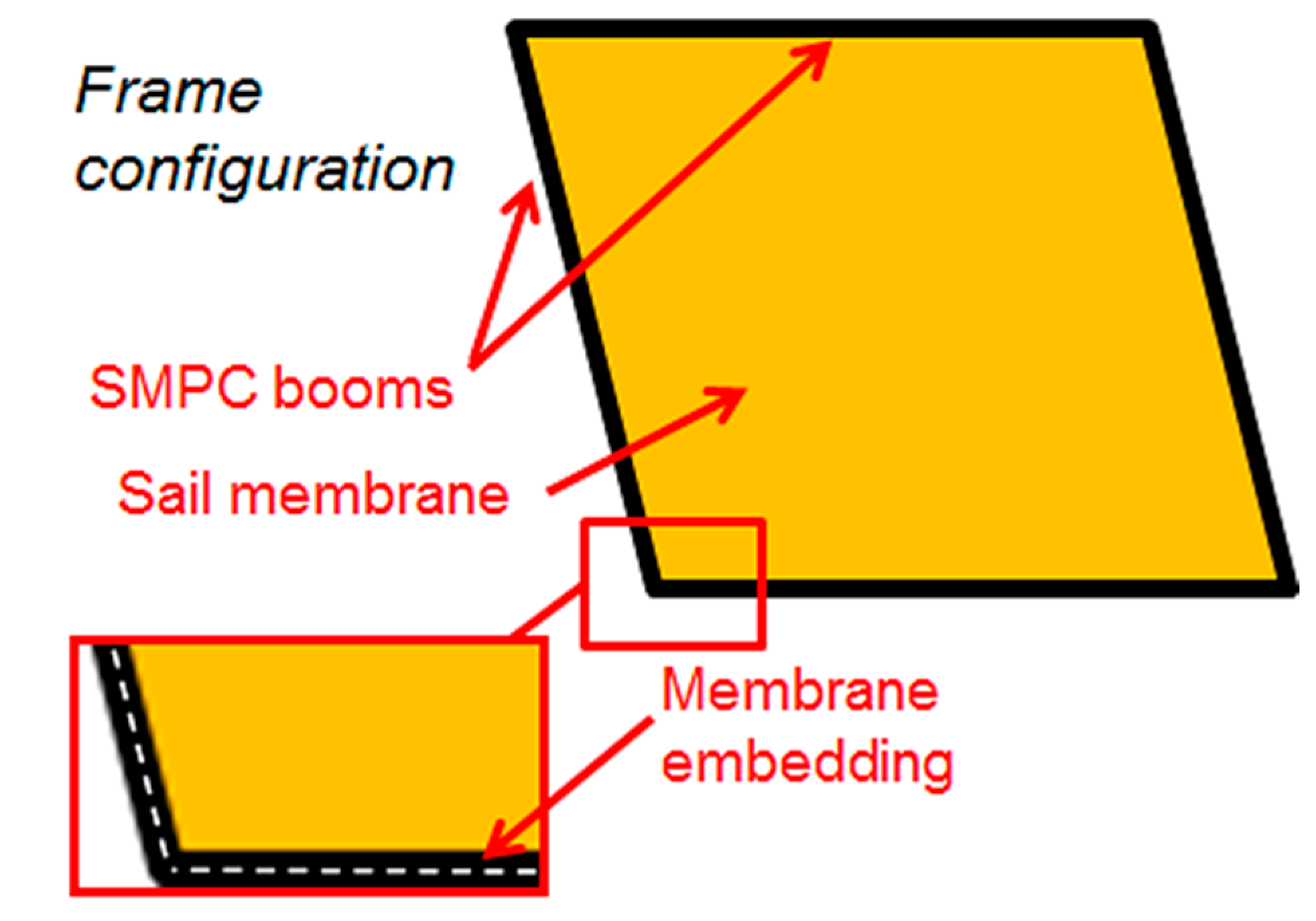
:1. Introduction
2. Materials and Methods
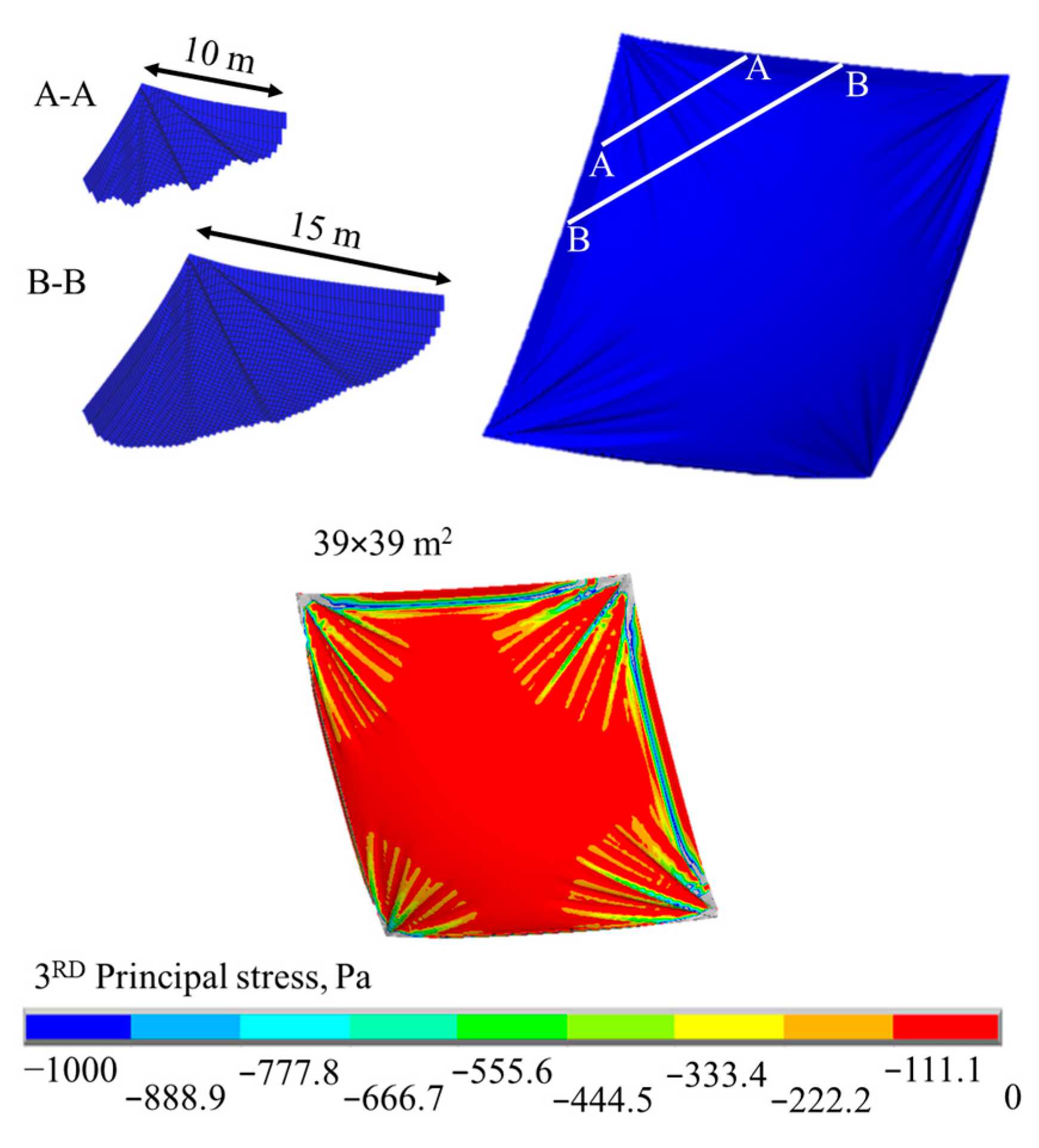
2.1. Numerical Modeling
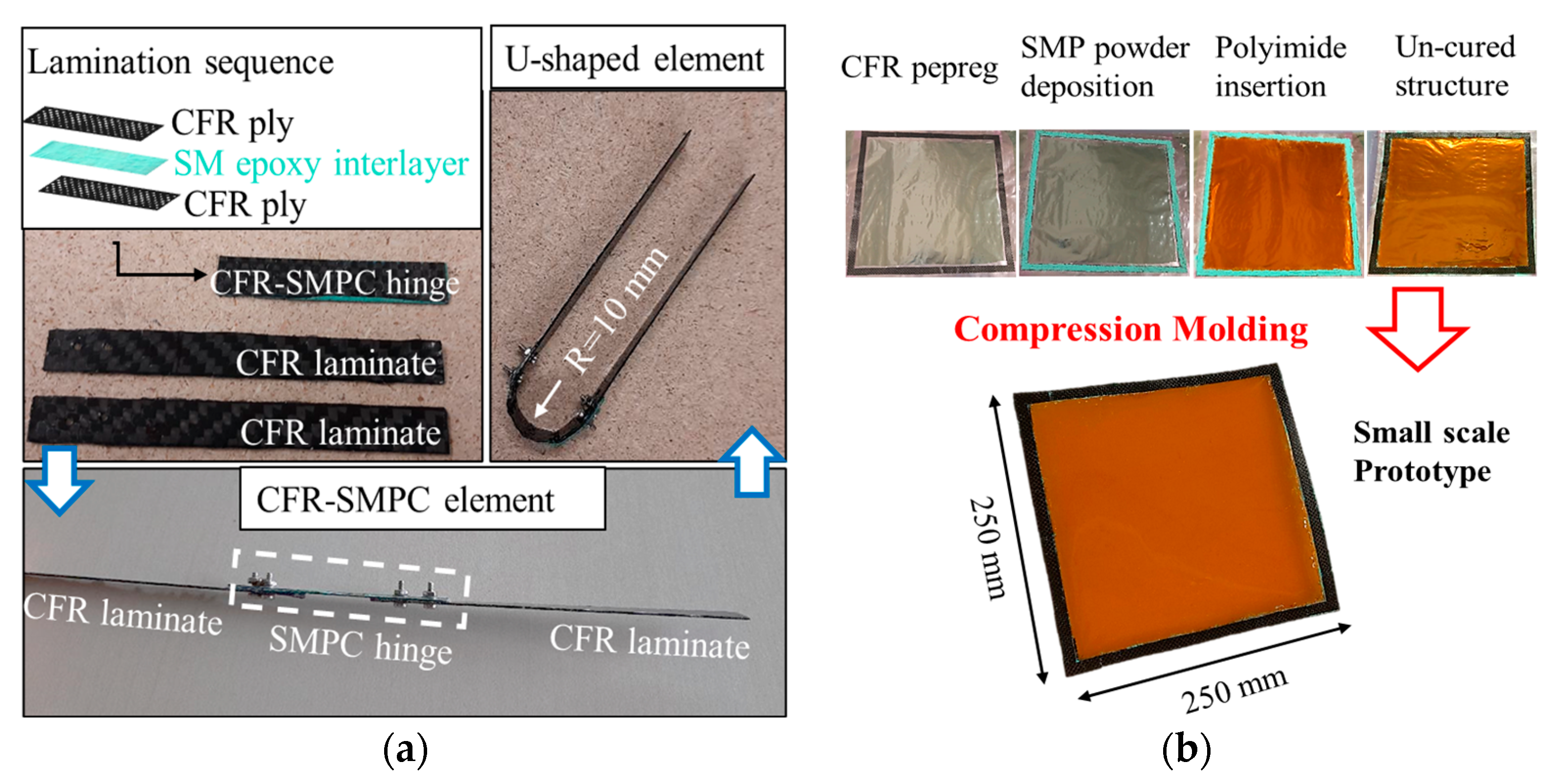
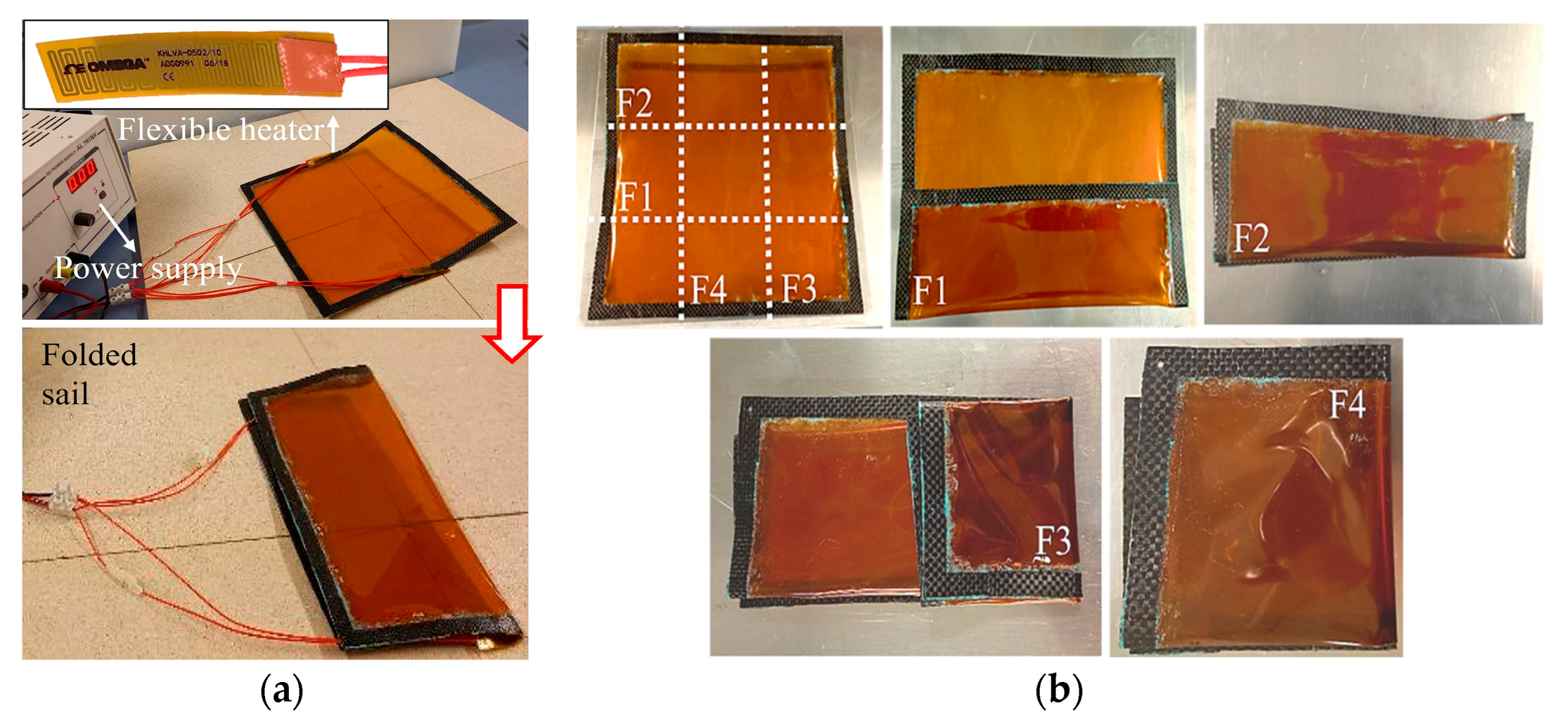
2.2. Manufacturing and Testing
2.2.1. Raw Materials and Suppliers
2.2.2. Molding of SMPC Structures
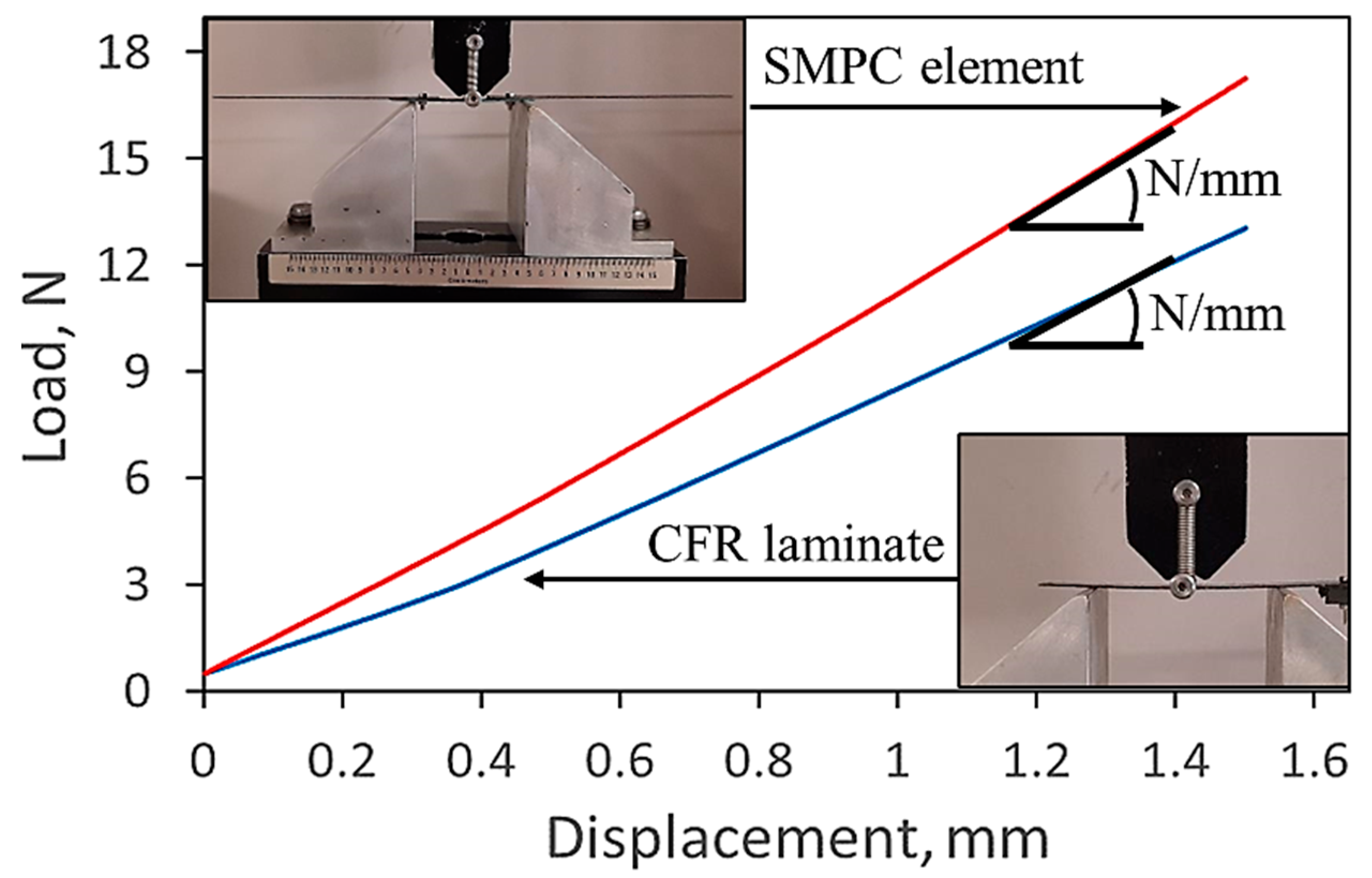
2.2.3. Mechanical Testing
2.2.4. Shape Memory Testing
3. Results
3.1. Numerical Modeling
3.2. Mechanical Testing
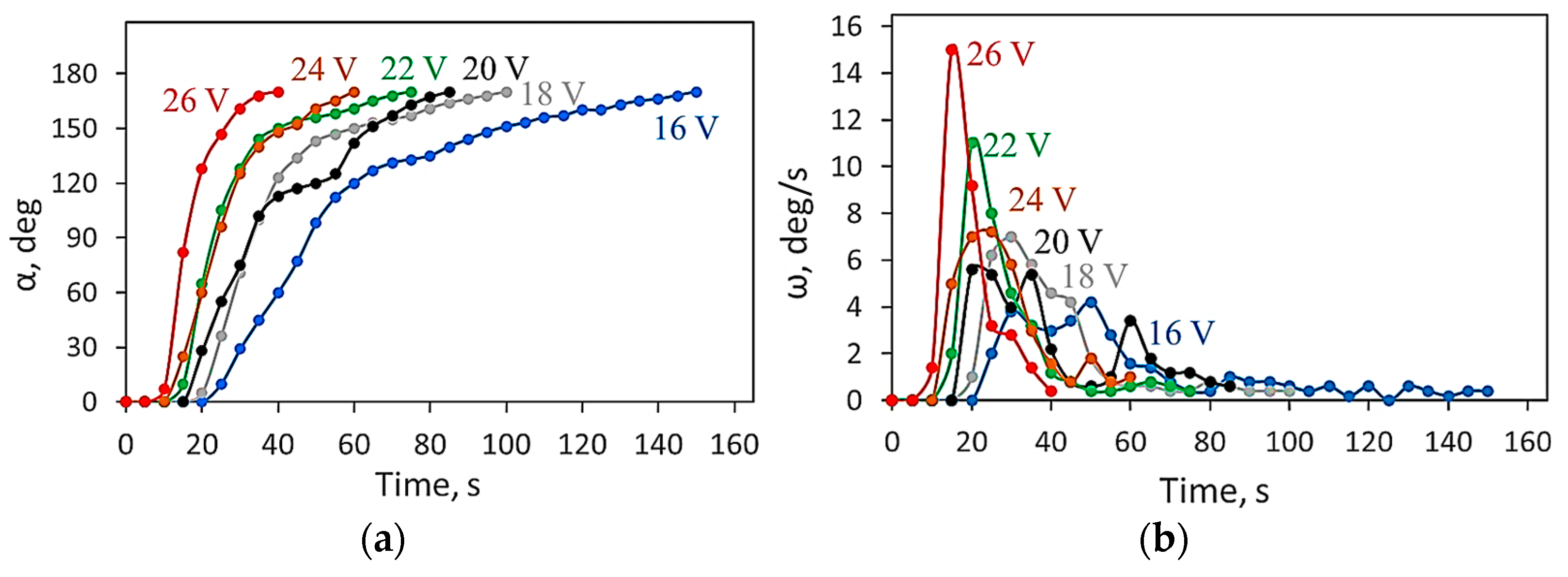
3.3. Shape Memory Testing
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karpenko, M.; Stosiak, M.; Daptula, A.; Urbanowiza, K.; Nugaras, J.; Krolczyk, G.; Zak, K. Performance evaluation of extruded polystyrene foam for aerospace engineering applications using frequency analyses. Int. J. Adv. Manuf. Technol. 2023, 126, 5515–5526. [Google Scholar] [CrossRef]
- Tsuda, Y.; Mori, O.; Funase, R.; Sawada, H.; Yamamoto, T.; Saiki, T.; Endo, T.; Yonekura, K.; Hoshino, H.; Kawaguchi, J. Achievement of IKAROS-Japanese deep space solar sail demonstration mission. Acta Astronaut. 2013, 82, 183–188. [Google Scholar] [CrossRef]
- Johnson, L.; Young, R.; Montgomery, E.; Alhorn, D. Status of solar sail technology within NASA. Adv. Space Res. 2011, 48, 1687–1694. [Google Scholar] [CrossRef]
- Fu, B.; Sperber, E.; Eke, F. Solar sail technology-A state of the art review. Prog. Aerosp. Sci. 2016, 86, 1–19. [Google Scholar] [CrossRef]
- Fernandez, J.M.; Lappas, V.J.; Daton-Lovett, A.J. Completely stripped solar sail concept using bi-stable reeled composite booms. Acta Astronaut. 2011, 69, 78–85. [Google Scholar] [CrossRef]
- Seefeldt, P.; Spietz, P.; Sproewitz, T.; Thimo Grundmann, J.; Hillebrandt, M.; Hobbie, C.; Ruffer, M.; Straubel, M.; To´th, N.; Zander, M. Gossamer-1: Mission concept and technology for a controlled deployment of gossamer spacecraft. Adv. Space Res. 2017, 59, 434–456. [Google Scholar] [CrossRef]
- Grundmann, J.T.; Bauer, W.; Biele, J.; Boden, R.; Ceriotti, M.; Cordero, F.; Dachwald, B.; Dumont, E.; Grimm, C.D.; Herčík, D.; et al. Capabilities of GOSSAMER-1 derived small spacecraft solar sails carrying MASCOT-derived nanolanders for in-situ surveying of NEAs. Acta Astronaut. 2019, 156, 330–362. [Google Scholar] [CrossRef]
- Spietz, P.; Spröwitz, T.; Seefeldt, P.; Grundmann, J.T.; Jahnke, R.; Mikschl, T.; Mikulz, E.; Montenegro, S.; Reershemius, S.; Renger, T.; et al. Paths not taken–The GOSSAMER roadmap’s other options. Adv. Space Res. 2021, 67, 2912–2956. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, P.; Wu, C.; Chen, K.; Ren, W.; Liu, L.; Tang, Y.; Ji, C.; Sang, X. SIASAIL-I solar sail: From system design to on-orbit demonstration mission. Acta Astronaut. 2022, 192, 133–142. [Google Scholar] [CrossRef]
- Spencer, D.A.; Betts, B.; Bellardo, J.M.; Diaz, A.; Plante, B.; Mansell, J.R. The LightSail 2 solar sailing technology demonstration. Adv. Space Res. 2021, 67, 2878–2889. [Google Scholar] [CrossRef]
- Underwood, C.; Viquerat, A.; Schenk, M.; Taylor, B.; Massimiani, C.; Duke, R.; Stewart, B.; Fellowes, S.; Bridges, C.; Aglietti, G.; et al. InflateSail de-orbit flight demonstration results and follow-on drag-sail applications. Acta Astronaut. 2019, 162, 344–358. [Google Scholar] [CrossRef]
- Zhang, X.; Nie, R.; Chen, Y.; He, B. Deployable structures: Structural design and static/dynamic analysis. J. Elast. 2021, 146, 199–235. [Google Scholar] [CrossRef]
- Zou, J.; Li, D.; Wang, J.; Yu, Y. Experimental study of measuring the wrinkle of solar sails. Aerospace 2022, 9, 289. [Google Scholar] [CrossRef]
- Dang, X.; Feng, F.; Plucinsky, P.; James, R.D.; Duan, H.; Wang, J. Inverse design of deployable origami structures that approximate a general surface. Int. J. Solids Struct. 2022, 234–235, 111224. [Google Scholar] [CrossRef]
- Wu, R.; Roberts, P.C.E.; Lyu, S.; Soutis, C.; Zheng, F.; Diver, C.; Gresil, M.; Blaker, J.J. Rigidisation of deployable space polymer membranes by heat-activated self-folding. Smart Mater. Struct. 2018, 27, 105037. [Google Scholar] [CrossRef]
- Seefeldt, P. A stowing and deployment strategy for large membrane space systems on the example of Gossamer-1. Adv. Space Res. 2017, 60, 1345–1362. [Google Scholar] [CrossRef]
- Sickinger, C.; Herbeck, L.; Breitbach, E. Structural engineering on deployable CFRP booms for a solar propelled sailcraft. Acta Astronaut. 2006, 58, 185–196. [Google Scholar] [CrossRef]
- Seefeldt, P.; Grundmann, J.T.; Hillebrandt, M.; Zander, M. Performance analysis and mission applications of a new solar sail concept based on crossed booms with tip-deployed membranes. Adv. Space Res. 2021, 67, 2736–2745. [Google Scholar] [CrossRef]
- Yang, H.; Liu, L.; Guo, H.; Lu, F.; Liu, Y. Wrapping dynamic analysis and optimization of deployable composite triangular rollable and collapsible booms. Struct. Multidiscip. Optim. 2019, 59, 1371–1383. [Google Scholar] [CrossRef]
- Hibbert, L.T.; Jordaan, H.W. Considerations in the design and deployment of flexible booms for a solar sail. Adv. Space Res. 2021, 67, 2716–2726. [Google Scholar] [CrossRef]
- Yang, H.; Fan, S.; Wang, Y.; Shi, C. Novel four-cell lenticular honeycomb deployable boom with enhanced stiffness. Materials 2022, 15, 306. [Google Scholar] [CrossRef]
- Yang, H.; Lu, F.; Guo, H.; Liu, R. Design of a new N-Shape composite ultra-thin deployable boom in the post-buckling range using response surface method and optimization. IEEE Access 2019, 7, 129659–129665. [Google Scholar] [CrossRef]
- Liu, Y.J.; Du, H.Y.; Liu, L.W.; Leng, J.S. Shape memory polymers and their composites in aerospace applications: A review. Smart Mater. Struct. 2014, 23, 023001. [Google Scholar] [CrossRef]
- Li, F.F.; Liu, L.W.; Lan, X.; Zhou, X.J.; Bian, W.F.; Liu, Y.J.; Leng, J.S. Preliminary design and analysis of a cubic deployable support structure based on shape memory polymer composite. Int. J. Smart Nano Mater. 2016, 7, 106–118. [Google Scholar] [CrossRef]
- Bellisario, D.; Quadrini, F.; Iorio, L.; Santo, L.; Zhang, Z.; Li, X.; Dong, H.; Semitekolos, D.; Konstantopoulos, G.; Charitidis, C.A. Microscopic testing of carbon fiber laminates with shape memory epoxy interlayer. Mater. Today Commun. 2022, 32, 103854. [Google Scholar] [CrossRef]
- Santo, L.; Quadrini, F.; Ganga, P.L.; Zolesi, V. Mission BION-M1: Results of RIBES/FOAM2 experiment on shape memory polymer foams and composites. Aerosp. Sci. Technol. 2015, 40, 109–114. [Google Scholar] [CrossRef]
- Quadrini, F.; Iorio, L.; Bellisario, D.; Santo, L. Shape memory polymer composite unit with embedded heater. Smart Mater. Struct. 2021, 30, 075009. [Google Scholar] [CrossRef]
- Bassetto, M.; Niccolai, L.; Boni, L.; Mengali, G.; Quarta, A.A.; Circi, C.; Pizzurro, S.; Pizzarelli, M.; Pellegrini, R.C.; Cavallini, E. Sliding mode control for attitude maneuvers of Helianthus solar sail. Acta Astronaut. 2022, 198, 100–110. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sail | SMPC Frame | |
|---|---|---|
| Element type | Shell 181 | Beam 188 |
| Thickness, µm | 7 | 1000 |
| Width, mm | 30 | |
| Density, g/cm3 | 1.54 | 1.42 |
| Ex = Ey, GPa | 10 | 52 |
| Ez, GPa | 7.2 | |
| Gxy, GPa | 3.7 | |
| Gxz = Gyz, GPa | 3.5 | |
| νxy | 0.34 | 0.042 |
| νxz = νyz | 0.3 |
| Small Sail | CFR-SMPC Element | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 Heater | 2 Heaters | |||||||
| 16 V | 18 V | 20 V | 22 V | 24 V | 26 V | 26 V | ||
| Top temperature, °C | 176 | 191 | 232 | 266 | 296 | 322 | - | - |
| Bottom temperature, °C | 110 | 133 | 145 | 164 | 189 | 211 | - | - |
| Temperature gradient, °C | 66 | 58 | 87 | 102 | 107 | 111 | - | - |
| Recovery time, s | 150 | 100 | 85 | 75 | 60 | 40 | 20 | 70 |
| Residual angle, deg | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 6.8 |
| Average angular recovery speed, deg/s | 1.1 | 1.7 | 2.0 | 2.3 | 2.8 | 4.2 | 8.5 | 2.6 |
| Maximum angular recovery speed, deg/s | 4.2 | 7.0 | 5.6 | 11 | 7.2 | 15 | 29 | 12.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quadrini, F.; Iorio, L.; Santo, L.; Circi, C.; Cavallini, E.; Pellegrini, R.C. Smart Composite Booms for Solar Sails. J. Compos. Sci. 2023, 7, 495. https://doi.org/10.3390/jcs7120495
Quadrini F, Iorio L, Santo L, Circi C, Cavallini E, Pellegrini RC. Smart Composite Booms for Solar Sails. Journal of Composites Science. 2023; 7(12):495. https://doi.org/10.3390/jcs7120495
Chicago/Turabian StyleQuadrini, Fabrizio, Leandro Iorio, Loredana Santo, Christian Circi, Enrico Cavallini, and Rocco Carmine Pellegrini. 2023. "Smart Composite Booms for Solar Sails" Journal of Composites Science 7, no. 12: 495. https://doi.org/10.3390/jcs7120495