

Towards mmWave Altimetry for UAS: Exploring the Potential of 77 GHz Automotive Radars

Abstract
:1. Introduction
- A discussion on mmWave automotive radars as a novel and feasible avenue for UAS altimetry;
- A simplified stepwise tutorial-themed mathematical and theoretical basis for understanding performance metrics;
- An evaluation of backscattering from the ground surface using hardware specifications of a pure look-down mmWave automotive radar;
- A rationalization of MOPSs for commercial aviation and a rationale for their adaptation to UASs;
- A systems engineering approach for deriving radar specifications from operational requirements.
2. Literature Review and Related Work
2.1. Innovative and Emerging Applications of mmWave Automotive Radars
2.2. Legacy and Contemporary Literature
2.3. Existing Studies on the Use of mmWave Automotive Radars for UASs
2.4. Commercial mmWave Radar Altimeter Offerings for UASs
3. State of the Art, Regulation, Opportunities, and Challenges
3.1. State of the Art
3.2. 5G Interference and Regulatory Requirements of mmWave Bands
3.3. Opportunities and Challenges
3.4. Rationale for Chipset Selection
4. Theoretical Basis of Performance Metrics
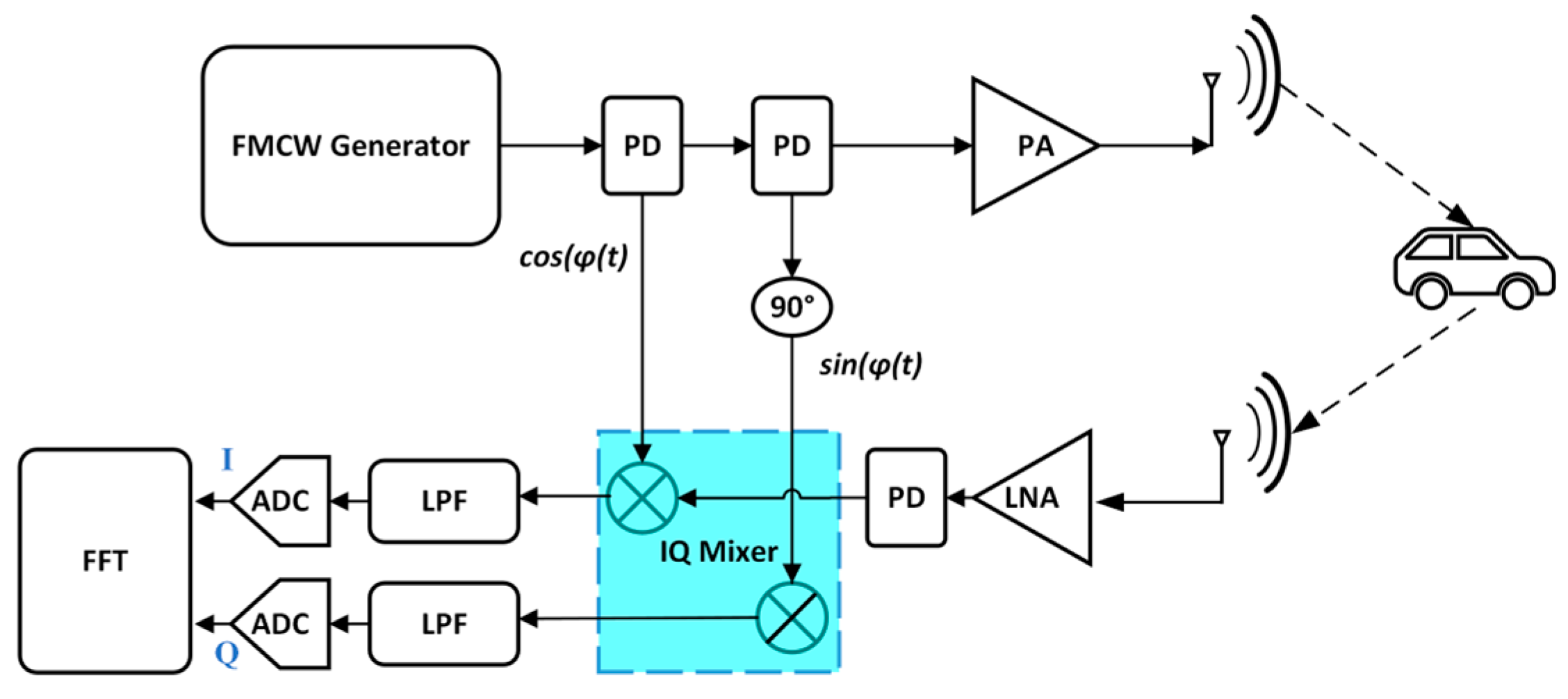
4.1. A Complex Baseband FMCW Radar
4.2. Range Estimation
4.3. Maximum Range and Range Resolution
4.4. Link Budget for Radar Altimeter
4.5. Supplementary Performance Metrics
5. Operational Requirements and Radar Specifications
5.1. Minimum Update Rate
5.2. Range Resolution and Accuracy
5.3. Maximum and Minimum Measurable Altitude
5.4. Waveform and Radar Specifications
6. Future Work and Challenges
6.1. Future Work
6.2. Challenges
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; He, Z.; Ma, Z.; Jun, P.; Yang, K. VIAE-Net: An End-to-End Altitude Estimation through Monocular Vision and Inertial Feature Fusion Neural Networks for UAV Autonomous Landing. Sensors 2021, 21, 6302. [Google Scholar] [CrossRef]
- Gebre-Egziabher, D.; Hayward, R.C.; Powell, J.D. A Low-Cost GPS/Inertial Attitude Heading Reference System (AHRS) for General Aviation Applications. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium (Cat. No.98CH36153), Palm Springs, CA, USA, 20–23 April 1998; IEEE: Piscataway, NJ, USA, 1998; pp. 518–525. [Google Scholar] [CrossRef]
- Royo, S.; Ballesta-Garcia, M. An Overview of Lidar Imaging Systems for Autonomous Vehicles. Appl. Sci. 2019, 9, 4093. [Google Scholar] [CrossRef]
- Pulutan, D.K.A.; Marciano, J.S. Design Trade-Offs in a Combined FMCW and Pulse Doppler Radar Front-End. In Proceedings of the IEEE 2013 Tencon—Spring, Sydney, NSW, Australia, 17–19 April 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 567–571. [Google Scholar] [CrossRef]
- Richards, M.A.; Scheer, J.A.; Holm, W.A. (Eds.) Principles of Modern Radar: Basic Principles; Institution of Engineering and Technology: London, UK, 2010; ISBN 9781891121524. [Google Scholar] [CrossRef]
- Fujibayashi, T.; Takeda, Y.; Wang, W.; Yeh, Y.-S.; Stapelbroek, W.; Takeuchi, S.; Floyd, B. A 76- to 81-GHz Multi-Channel Radar Transceiver. IEEE J. Solid-State Circuits 2017, 52, 2226–2241. [Google Scholar] [CrossRef]
- Srinivasan, V. CMOS MMIC Ready for Road, A Technology Overview. February 2018. Available online: https://www.ti.com/lit/an/swra592/swra592.pdf (accessed on 1 February 2024).
- Soumya, A.; Krishna Mohan, C.; Cenkeramaddi, L.R. Recent Advances in mmWave-Radar-Based Sensing, Its Applications, and Machine Learning Techniques: A Review. Sensors 2023, 23, 8901. [Google Scholar] [CrossRef]
- Pichavant, C. Use of 4200–4400 MHz Radio Altimeter Band. In Proceedings of the 24th Meeting of Working Group F Aeronautical Communications Panel, Paris, France, 17–21 March 2011. [Google Scholar]
- Taylor Canada, J. Handbook on Radio Frequency Spectrum Requirements for Civil Aviation Part I. In Proceedings of the 28th Meeting of Working Group F Aeronautical Communications Panel, Lima, Peru, 11–22 March 2013. [Google Scholar]
- Jose, E.; Adams, M.; Mullane, J.S.; Patrikalakis, N.M. Predicting millimeter wave radar spectra for autonomous navigation. IEEE Sens. J. 2010, 10, 960–971. [Google Scholar] [CrossRef]
- Ginsburg, B.; Ramasubramanian, K.; Singh, J. Fluid-Level Sensing Using 77-GHz Millimeter Wave; Texas Instruments: Dallas, TX, USA, 2017; Available online: https://www.ti.com/lit/wp/spyy004/spyy004.pdfa (accessed on 6 March 2024).
- Weiß, J.; Santra, A. One-Shot Learning for Robust Material Classification Using Millimeter-Wave Radar System. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]
- Omer, A.E.; Shaker, G.; Safavi-Naeini, S.; Murray, K.; Hughson, R. Glucose levels detection using mm-wave radar. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]
- Garcia, K.; Yan, M.; Purkovic, A. Robust Traffic and Intersection Monitoring Using Millimeter Wave Sensors; Texas Instruments: Dallas, TX, USA, 2018; Available online: https://www.ti.com/lit/pdf/spyy002 (accessed on 5 March 2024).
- Ahmed, B.; Kara, A.; Zencir, E.; Benzaghta, M. Opportunities and Challenges in Measurement of 9-mm Bullet Model with 77 GHz Mmwave COTS Radar Systems. Microw. Opt. Technol. Lett. 2020, 62, 3772–3778. [Google Scholar] [CrossRef]
- Morris, P.J.B.; Hari, K. Detection and localization of unmanned aircraft systems using millimeter-wave automotive radar sensors. IEEE Sens. Lett. 2021, 5, 1–4. [Google Scholar] [CrossRef]
- Hu, Y.; Toda, T. Remote Vital Signs Measurement of Indoor Walking Persons Using mm-Wave FMCW Radar. IEEE Access 2022, 10, 78219–78230. [Google Scholar] [CrossRef]
- Ran, Y.; Zhang, D.; Chen, J.; Hu, Y.; Chen, Y. Contactless Blood Pressure Monitoring with mmWave Radar. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 541–546. [Google Scholar]
- Li, W.; Chen, R.; Wu, Y.; Zhou, H. Indoor Positioning System Using a Single-Chip Millimeter Wave Radar. IEEE Sens. J. 2023, 23, 5232–5242. [Google Scholar] [CrossRef]
- Skolnik, M.I. Radar Handbook, 3rd ed.; McGraw-Hill Education: New York, NY, USA, 2008. [Google Scholar]
- Mahafza, B.R. Radar Systems Analysis and Design Using MATLAB, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Ding, J.; Wang, Z.; Ma, W.; Wu, X.; Wang, M. TDM-MIMO Automotive Radar Point-Cloud Detection Based on the 2-D Hybrid Sparse Antenna Array. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Bilik, I.; Longman, O.; Villeval, S.; Tabrikian, J. The Rise of Radar for Autonomous Vehicles: Signal Processing Solutions and Future Research Directions. IEEE Signal Process. Mag. 2019, 36, 20–31. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive Radars: A Review of Signal Processing Techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Hakobyan, G.; Yang, B. High-Performance Automotive Radar: A Review of Signal Processing Algorithms and Modulation Schemes. IEEE Signal Process. Mag. 2019, 36, 32–44. [Google Scholar] [CrossRef]
- Rao, S. MIMO Radar; Texas Instruments: Dallas, TX, USA, 2018; Available online: https://www.ti.com/lit/an/swra554a/swra554a.pdf (accessed on 3 February 2024).
- Rao, S. Introduction to mmwave Sensing: FMCW Radars; Texas Instruments: Dallas, TX, USA, 2017; Available online: https://www.ti.com/content/dam/videos/external-videos/2/3816841626001/5415528961001.mp4/subassets/mmwaveSensing-FMCW-offlineviewing_0.pdf (accessed on 26 January 2024).
- Dham, V. Programming Chirp Parameters in TI Radar Devices; Texas Instruments: Dallas, TX, USA, 2020; Available online: https://www.ti.com/lit/an/swra553a/swra553a.pdf (accessed on 4 February 2024).
- Ahmed, B. Exploring the Potentials of Commercial Radar Chipsets for Proximity Sensing with Resolving Velocity Ambiguity. Ph.D. Thesis, Atilim University, Ankara, Turkey, 2022. [Google Scholar]
- Alizadeh, M. Remote Vital Signs Monitoring Using a mm-Wave FMCW Radar. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2019. [Google Scholar]
- Li, X.; Wang, X.; Yang, Q.; Fu, S. Signal Processing for TDM MIMO FMCW Millimeter-Wave Radar Sensors. IEEE Access 2021, 9, 167959–167971. [Google Scholar] [CrossRef]
- Wessendorp, N.; Dinaux, R.; Dupeyroux, J.; de Croon, G.C.H.E. Obstacle Avoidance Onboard MAVs Using an FMCW Radar. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 117–122. [Google Scholar]
- Sie, E.; Liu, Z.; Vasisht, D. BatMobility: Towards Flying without Seeing for Autonomous Drones. In Proceedings of the 29th Annual International Conference on Mobile Computing and Networking, Madrid, Spain, 2–6 October 2023; ACM: New York, NY, USA, 2023; pp. 1–16. [Google Scholar]
- Safa, A.; Verbelen, T.; Catal, O.; Van de Maele, T.; Hartmann, M.; Dhoedt, B.; Bourdoux, A. FMCW Radar Sensing for Indoor Drones Using Learned Representations. arXiv 2023, arXiv:2301.02451. [Google Scholar]
- Hugler, P.; Geiger, M.; Waldschmidt, C. 77 GHz Radar-Based Altimeter for Unmanned Aerial Vehicles. In Proceedings of the 2018 IEEE Radio and Wireless Symposium (RWS), Anaheim, CA, USA, 15–18 January 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 129–132. [Google Scholar]
- Hugler, P.; Roos, F.; Schartel, M.; Geiger, M.; Waldschmidt, C. Radar Taking Off: New Capabilities for UAVs. IEEE Microw. Mag. 2018, 19, 43–53. [Google Scholar] [CrossRef]
- Başpınar, Ö.O.; Omuz, B.; Öncü, A. Detection of the Altitude and On-the-Ground Objects Using 77-GHz FMCW Radar Onboard Small Drones. Drones 2023, 7, 86. [Google Scholar] [CrossRef]
- LR-D1 Pro: Dual-Band Radar Altimeter. Available online: https://ainstein.ai/lr-d1-pro-dual-band-radar-altimeter/ (accessed on 7 February 2024).
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-Wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Scholvin, J.; Greenberg, D.R.; del Alamo, J.A. Fundamental Power, and Frequency Limits of Deeply Scaled CMOS for RF Power Applications. In Proceedings of the International Electron Devices Meeting, San Francisco, CA, USA, 11–13 December 2006. [Google Scholar]
- Pichavant, C. Key Potential Operational Effects from 5G on Radio Altimeter. In Regional Preparations for WRC 23 ATU. Available online: http://tinyurl.com/4awfamc2 (accessed on 2 February 2024).
- FCC 47 CFR 15.249 Operation within the bands 902–928 MHz, 2400–2483.5 MHz, 5725–5875 MHz, and 24.0–24.25 GHz. Available online: https://www.govinfo.gov/content/pkg/CFR-2009-title47-vol1/pdf/CFR-2009-title47-vol1-sec15-249.pdf (accessed on 3 February 2024).
- Ramasubramanian, K.; Ramaiah, K.; Aginskiy, A. Moving from Legacy 24 GHz to State-of-the-Art 77 GHz Radar, Oct 2017. Available online: https://www.ti.com/lit/wp/spry312/spry312.pdf (accessed on 1 February 2024).
- Proakis, J. Digital Communications; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Jankiraman, M. FMCW Radar Design; Artech House: Norwood, MA, USA, 2018. [Google Scholar]
- Menzel, W.; Moebius, A. Antenna Concepts for Millimeter-Wave Automotive Radar Sensors. Proc. IEEE 2012, 100, 2372–2379. [Google Scholar] [CrossRef]
- Händel, C.; Konttaniemi, H.; Autioniemi, M. State-of-the-Art Review on Automotive Radars and Passive Radar Reflectors, Arctic Challenge Research Project; Research Reports and Compilations; Lapland University of Applied Sciences: Rovaniemi, Finland, 2018. [Google Scholar]
- Texas Instruments. IWR1843, Single-Chip 76-GHz to 81-GHz Industrial Radar Sensor Integrating DSP, MCU and Radar Accelerator. Available online: https://www.ti.com/product/IWR1843 (accessed on 31 January 2024).
- Park, J.; Ryu, H.; Ha, K.-W.; Kim, J.-G.; Baek, D. 76–81-GHz CMOS Transmitter with a Phase-Locked-Loop-Based Multichirp Modulator for Automotive Radar. IEEE Trans. Microw. Theory Tech. 2015, 63, 1399–1408. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S.; Nawab, S.H. Signals & Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Ulaby, F.; Dobson, M.C.; Álvarez-Pérez, J.L. Handbook of Radar Scattering Statistics for Terrain; Artech House: Norwood, MA, USA, 2019. [Google Scholar]
- Reilly, J.P.; McDonald, R.L.; Dockery, G.D. RF-Environment Models for the ADSAM Program; Report No. A1A97U 070; Johns Hopkins University Applied Physics Laboratory: Laurel, MD, USA, 1997; Available online: https://apps.dtic.mil/sti/tr/pdf/ADA346190.pdf (accessed on 3 February 2024).
- Long, M.W. Radar Reflectivity of Land and Sea, 3rd ed.; Artech House: Norwood, MA, USA, 2001. [Google Scholar]
- MathWorks. Reflectivity of Land Surface. Available online: https://www.mathworks.com/help/radar/ref/landreflectivity.html (accessed on 27 January 2024).
- Abbas, A.; Elsaid, M.; Mahmoud, S.F.; Abdallah, E.A.; El-Hennawy, H.M. Link Budget Analysis for FMCW Radio Altimeter. In Proceedings of the 2021 International Telecommunications Conference (ITC-Egypt), Alexandria, Egypt, 13–15 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4. [Google Scholar]
- MathWorks. FMCW Radar Altimeter Simulation. Available online: https://www.mathworks.com/help/radar/ug/fmcw-radar-altimeter-simulation.html (accessed on 28 January 2024).
- Blake, L.V. A Guide to Basic Pulse-Radar Maximum-Range Calculation Part 1—Equations, Definitions, and Aids to Calculation; Naval Research Laboratory, Radar Geophysics Branch, Radar Division: Washington, DC, USA, 1969; Available online: https://apps.dtic.mil/sti/pdfs/AD0701321.pdf (accessed on 8 February 2024).
- RTCA. Minimum Performance Standard for Airborne Low-Range Radar Altimeters; DO-155; RTCA: Washington, DC, USA, 1974. [Google Scholar]
- EUROCAE. Minimum Performance Specification for Airborne Low Range Radio Altimeter Equipment; ED-30; EUROCAE: Saint-Denis, France, 1980. [Google Scholar]
- Honeywell. ALA-52B Radio Altimeter. Available online: https://aerospace.honeywell.com/us/en/products-and-services/product/hardware-and-systems/navigation-and-radios/ala-52b-radar-altimeter (accessed on 22 January 2024).
- Texas Instruments. IWR1843BOOST Evaluation Module for Single Chip 77GHz mmWave Sensor. Available online: https://www.ti.com/tool/IWR1843BOOST (accessed on 30 January 2024).
- Nguyen, D.D.; Rohacs, J.; Rohacs, D. Autonomous Flight Trajectory Control System for Drones in Smart City Traffic Management. ISPRS Int. J. Geo-Inf. 2021, 10, 338. [Google Scholar] [CrossRef]
- Balanis, C.A. Antenna Theory: Analysis and Design, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Shannon, C.E. Communication in the Presence of Noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Ramasubramanian, K. Using Complex-Baseband Architecture in FMCW Radar Systems. Available online: https://www.ti.com/lit/pdf/spyy007 (accessed on 23 January 2024).
- Al-Qudsi, B.; Joram, N.; Strobel, A.; Ellinger, F. Zoom FFT for Precise Spectrum Calculation in FMCW Radar Using FPGA. In Proceedings of the 2013 9th Conference on Ph.D. Research in Microelectronics and Electronics (PRIME), Villach, Austria, 24–27 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 337–340. [Google Scholar]
- Venon, A.; Dupuis, Y.; Vasseur, P.; Merriaux, P. Millimeter Wave FMCW RADARs for Perception, Recognition and Localization in Automotive Applications: A Survey. IEEE Trans. Intell. Veh. 2022, 7, 533–555. [Google Scholar] [CrossRef]
- Abdu, F.J.; Zhang, Y.; Fu, M.; Li, Y.; Deng, Z. Application of Deep Learning on Millimeter-Wave Radar Signals: A Review. Sensors 2021, 21, 1951. [Google Scholar] [CrossRef]
- Wilson, A.N.; Kumar, A.; Jha, A.; Cenkeramaddi, L.R. Embedded Sensors, Communication Technologies, Computing Platforms and Machine Learning for UAVs: A Review. IEEE Sens. J. 2022, 22, 1807–1826. [Google Scholar] [CrossRef]
- Coonrod, J. Reliably Bend and Form Microwave PCBs. Microw. J. 2013, 56, 92–95. [Google Scholar]
- Texas Instruments. mmWave Demo Visualizer. Available online: https://dev.ti.com/gallery/view/mmwave/mmWave_Demo_Visualizer/ver/4.4.0/ (accessed on 8 February 2024).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Application |
|---|---|---|
| [11] | 2010 | Autonomous robot navigation |
| [12] | 2017 | Fluid level sensing |
| [13] | 2018 | Material classification |
| [14] | 2018 | Blood glucose level detection |
| [15] | 2018 | Traffic monitoring |
| [16] | 2020 | RCS analysis of 9 mm bullet |
| [17] | 2021 | UAS detection and localization |
| [18] | 2022 | Vital sign measuring |
| [19] | 2022 | Blood pressure monitoring |
| [20] | 2023 | Indoor positioning system |
| Requirement | Value | Remarks |
|---|---|---|
| 20 dB | [28] | |
| Accuracy | ±0.45 m | [59,61] |
| 1 m | Minimum altitude requirement | |
| 500 m | Maximum altitude requirement | |
| 20 m/s | Maximum platform velocity | |
| 273.15 °K | Antenna temperature |
| Requirement | Value | Remarks |
|---|---|---|
| 56° | HPBW azimuth [62] | |
| 28° | HPBW elevation [62] | |
| 12.5 dBm | MAX Tx power, IWR1843 [62] | |
| 10.5 dBi | IWR1843Boost [62] | |
| 10.5 dBi | IWR1843Boost [62] | |
| 77 GHz | Operating frequency [62] | |
| 3.9 mm | Wavelength | |
| 0.14 | RMS surface slope | |
| 15 dB | Receiver noise figure |
| Parameter | Value | Remarks |
|---|---|---|
| 26 ms | Max time b/w data updates (42) | |
| 38 Hz | Minimum update rate (43) | |
| 1 ms | Chirp duration | |
| 1.91 MHz/μs | Chirp slope | |
| 1.91 GHz | Chirp BW (3) | |
| 0.07 m | Function of chirp BW (20) | |
| ) | 0.85 m | Function of sampling, FFT and slope (44) |
| 1024 | FFT size | |
| 0.85 m | Minimum measurable altitude (47) | |
| 0.85 m | Altitude accuracy (25) | |
| 16 | Number of chirps/frame | |
| 16 ms | Frame duration (27) | |
| 62.5 Hz | Noise BW (28) | |
| −141.27 dBm | Noise power (29) | |
| 2.47 | Normalized RCS (23) | |
| 4548.9 m | Function of minimum SNR (31) | |
| 783.3 m | Function of IF, BW, and Slope (16) | |
| 870.4 m | Function of FFT and resolution (49) | |
| 783.3 m | Maximum measurable altitude (50) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Awan, M.A.; Dalveren, Y.; Kara, A.; Derawi, M. Towards mmWave Altimetry for UAS: Exploring the Potential of 77 GHz Automotive Radars. Drones 2024, 8, 94. https://doi.org/10.3390/drones8030094
Awan MA, Dalveren Y, Kara A, Derawi M. Towards mmWave Altimetry for UAS: Exploring the Potential of 77 GHz Automotive Radars. Drones. 2024; 8(3):94. https://doi.org/10.3390/drones8030094
Chicago/Turabian StyleAwan, Maaz Ali, Yaser Dalveren, Ali Kara, and Mohammad Derawi. 2024. "Towards mmWave Altimetry for UAS: Exploring the Potential of 77 GHz Automotive Radars" Drones 8, no. 3: 94. https://doi.org/10.3390/drones8030094