1. Introduction
Tracking a moving ground target is one of the important capabilities of UAVs [
1]. Making the tracking process automatic and free of human intervention is essential for relieving the burden on UAV operators and improving the efficiency and safety of UAV missions. The goal of this paper is to develop a control scheme that allows multiple fixed-wing UAVs to cooperatively track a moving ground target in unknown windy conditions.
Target tracking using multiple fixed-wing UAVs remains a challenge. On one hand, the motion of fixed-wing UAVs is subject to various input constraints. To prevent stalling, a fixed-wing aircraft cannot hover and must maintain a positive forward airspeed. Accordingly, the UAVs must fly in a circle around the ground-based moving target [
2]. On the other hand, to avoid collisions and to ensure that the sensors can cover the target, the UAVs need to be evenly distributed around the target and maintain a certain phase interval [
3]. Standoff tracking is a possible solution for target tracking using a team of fixed-wing UAVs. In this pattern, the UAVs keep a certain distance (called the standoff radius) from the target and move in a circular motion (termed the standoff circle) at a proper altitude relative to the target.
In cooperative target tracking missions with unknown wind, three main technical issues should be considered: (1) Relative distance regulation, which focuses on how to enable the UAVs to converge to a circular orbit with a prescribed standoff radius around the target by controlling their headings [
4]. (2) Intervehicle phase separation, which focuses on distributing the hovering UAVs uniformly over a standoff circle with a certain angular phase difference by controlling their airspeeds [
5]. (3) Background wind resistance, which focuses on how to achieve robust stability for UAVs performing standoff tracking in the presence of wind and the target’s motion [
6].
Relative distance regulation, which aims to steer the UAV to a circular orbit around the target, is the key to achieving standoff tracking of a moving target with a single UAV. Typically, a guidance law is proposed to regulate the position of the UAV on a predefined circular path. The path usually guides the UAV to circle around a ground-based moving target at a constant distance. Consequently, the UAV trajectory can be expressed as a circle with a predefined standoff radius in the target’s frame. There are various types of the guidance law, including reference point guidance (RPG) [
7,
8,
9], Lyapunov guidance vector field (LGVF) [
10,
11,
12,
13,
14], and so on. Based on a predefined target tracking path, the standoff tracking problem of a ground-based moving target can be converted into a path following problem [
7]. For example, in [
8,
9], a nonlinear guidance law is proposed to achieve path following for a curved path. In this approach, each point on the curved path is designated as a reference point, and a lateral acceleration command is generated to drive the UAV to the reference point. However, because the ground-based target’s moving speed is usually much slower than that of the UAV, the RPG method cannot be directly applied to the standoff target tracking problem. As a new form of potential field, the LGVF is introduced to guide the UAVs to achieve standoff target tracking. In [
10], an LGVF is proposed for hovering maneuvers around a stationary target. This approach also enables moving target tracking, but it may lead to slow convergence due to constant curvature in the LGVF. To shorten the convergence time, the authors in [
11] combine the tangent with the LGVF, while in [
12,
13], the authors add the circulation parameter
c into the original LGVF. The shape of the LGVF can be adaptively adjusted by changing the circulation parameter. In this way, a faster convergence to the standoff circle can be achieved due to a higher contraction component. Based on the works of [
12,
13], an offline optimal parameter searching method was presented for selecting the optimal guidance function to shorten the convergence time in [
14]. However, this approach has such a heavy computational load that it cannot be extended to real-time application scenarios. Although these above methods have been verified to be feasible for the single UAV standoff tracking problem, they only focus on the optimization of the LGVF without considering the input constraints of fixed-wing UAVs, such as heading rate limitations. If the curvature of the LGVF is too large, the actual trajectory of a UAV cannot converge to a standoff circle due to the saturated rudders. Therefore, it is still necessary to design a control law for regulating the relative distance while satisfying the turning rate limitation.
The performance of target localization algorithms is significantly impacted by the relative sensor-target geometry. Observation configurations, or different sensor-target geometries, produce varying uncertainty ellipses of the target location algorithm. It is worth considering which observation configuration can yield the best target localization results. By minimizing the Cramer–Rao lower bound (CRLB), which provides a lower bound on the estimator performance, the uncertainty in the estimation process can be reduced. Therefore, in [
15] they utilize the determinant of the CRLB to determine the observation configuration that results in a minimal measure of the uncertainty ellipse. According to the conclusions in [
15], if only two UAVs perform a standoff tracing mission, the intersection angle subtended at the target (called the phase separation angle) by two UAVs will be
; if the number of UAVs is
N ≥ 3, the phase separation angle between adjoining UAVs will be
. An optimal configuration should position the UAVs at equal angular intervals around the perimeter of the standoff circle. This requires phase separation in the coordinated standoff tracking problem. Various phase separation methods have been proposed, including model predictive control (MPC) [
16,
17], sliding mode control (SMC) [
18,
19], conical pendulum motion [
20], consensus algorithm [
21,
22,
23,
24], and so on. In [
16,
17], a nonlinear MPC framework for coordinated standoff tracking by two UAVs is proposed The optimal control outputs for speed and turning rate are generated by minimizing the sum of weighted cost functions that include the standoff-distance regulation error and phase separation error in a receding horizon. However, as the number of UAVs increases, the computational complexity and iterative time required for searching optimal results also increase. In [
18], a hovering algorithm based on sliding mode control is presented to control the virtual leader’s position on a standoff circle centered at the ground-based moving target. However, the SMC method suffers from chattering due to the discontinuity of the signum function in the control law. To eliminate chattering, the signum function is replaced by a saturation function in Ref. [
19]. However, both Refs. [
18,
19] ignore the vehicle airspeed constraint. The airspeed of the fixed-wing UAV is restricted within lower and upper bounds. In order to satisfy the airspeed boundary constraint, Ref. [
20] proposes that the UAV reduces its speed by decreasing the standoff radius when flying on the right-hand side of the target and its airspeed reaches the upper bound. Conversely, the UAV increases the standoff radius to increase its airspeed when its airspeed reaches the lower bound. However, this approach causes the distance between the UAV and the target to oscillate, leading to failure in achieving the control objectives of the cooperative standoff target tracking problem. Different from the integrated controller in [
20], the heading control channel and velocity control channel are decoupled in [
21,
22,
23,
24]. The space phase angle is chosen as the coordination variable of the consensus algorithm, allowing for the design of cooperative airspeed controllers for the UAVs. The phase separation angles among the UAVs can asymptotically converge, reflecting equal space separation. However, the airspeed constraint is not taken into account in the space phase separation method. Furthermore, the phase separation angles between
are discontinuous, and will lead to oscillating airspeed control input. This is not beneficial for reducing the space phase separation error. Therefore, it is critical to design a phase separation controller that provides a smooth signal output and meets the airspeed constraint of UAVs in the coordinated standoff tracking problem.
Most of the research mentioned above assumes an ideal non-wind environment or a known constant background wind. However, in practice, background wind is usually present and it affects the performance of the UAVs, especially when the background wind is unknown. In [
25], a robust term is added to the standoff tracking control law to obtain disturbance rejection for wind gusts. However, the response time of the robust controller is too long and unsuitable for target tracking requiring high maneuverability. To quantitatively describe wind dynamics, a simple conservative model (e.g., sine function as in [
26] or linear model as in [
27]) or a more sophisticated one (e.g., stochastic as in [
28]) can be used. In [
28], the Dryden model [
29] and Davenport model [
30] are used to describe the dynamics of wind at high altitudes or near the ground, respectively. The unscented Kalman filter (UKF) is introduced to estimate the velocity of background wind. However, the accuracy of the wind speed estimation largely depends on the accuracy of the constructed wind dynamic model. In reality, wind is stochastic and time-varying, which makes it difficult to model. In [
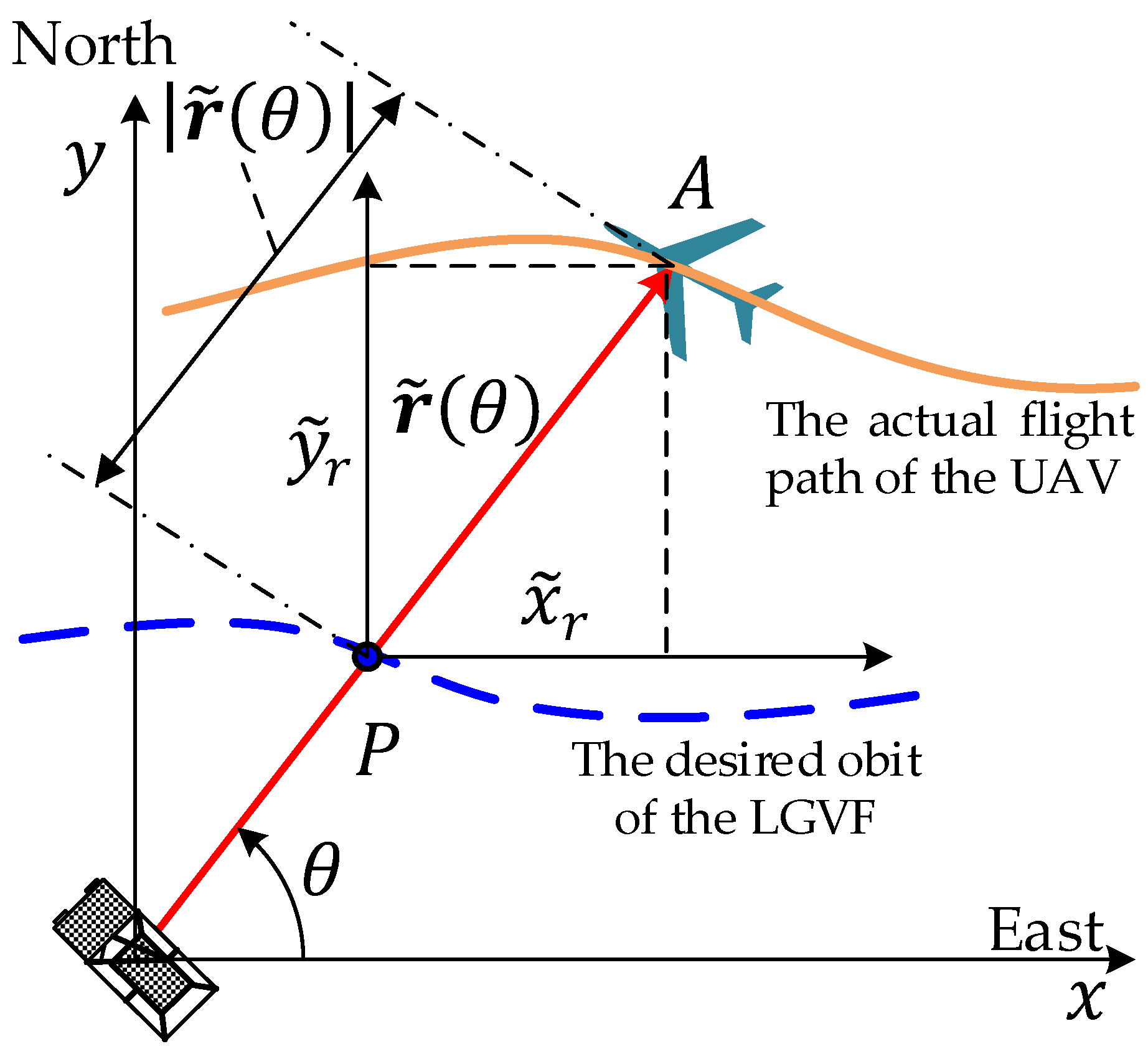
31], an adaptive estimator is utilized to estimate the wind velocity. In the case of a stationary target without wind, the vehicle trajectory converges to a circular orbit (called a perfect trajectory or orbit) by implementing a designed standoff tracking control law. However, for a moving target with wind, the actual trajectory cannot converge to the perfect one due to the disturbance caused by the wind and the target’s motion. The wind velocity estimation can be obtained by reducing the offset between the actual vehicle trajectory and the perfect trajectory. However, the convergence rate of the estimator is slow because it only uses the radial distance of the offset. Therefore, designing a wind velocity estimator that has a high accuracy and fast convergence rate remains challenging.
This paper addressed the challenges of cooperative standoff target tracking using multiple fixed-wing UAVs with input constraints and the considerations of unknown background wind and target motion. Controllers satisfying the input constraints, such as heading rate and airspeed limitation, are designed to guarantee a team of fixed-wing UAVs can perform efficiently during coordinated standoff tracking missions. The major contributions of the paper are as follows: (a) A heading rate control law based on LGVF is proposed. To satisfy the limitation of the heading rate, the minimum allowable standoff radius is formulated. It is proved that this proposed heading rate controller can guarantee that the UAV can asymptotically converge to a standoff circle hovering over the target under arbitrary initial conditions of the position and heading. (b) To avoid discontinuities in the space phase angle, a new term called the temporal phase is proposed to represent the phase separation. An airspeed control law is introduced to steer a team of UAVs maintaining an optimal observation configuration, which requires distribution around the standoff circle with equal phase separation. The proofs for satisfying the airspeed limitation and global convergence using the proposed speed controller are provided. (c) The target’s motion and background wind are regarded as external disturbances. The offset vector caused by external disturbances between the actual trajectory and the perfect/desired orbit is utilized to estimate the composition velocity of wind and the target’s motion. It is proved that the estimated result asymptotically converges to the true value of the composition velocity.
The remainder of this paper is structured as follows.
Section 2 presents the problem formulation, including assumptions made in this study, a UAV kinematic model with control input constraints, and control objectives.
Section 3 discusses the problem of standoff tracking using a single UAV. Based on the LGVF, a lateral controller with a heading rate input constraint is proposed to regulate the position of a UAV on a circular orbit around the target under the condition of an arbitrary initial position and heading. In
Section 4, we introduce a term called temporal phase to represent the spatial distribution of the UAVs on the standoff circle and propose cooperative controllers with an airspeed input constraint to achieve the desired temporal phase separation. In
Section 5, an online estimator is developed to adapt the proposed heading rate and airspeed controllers to the case of a moving target in the presence of wind.
Section 6 presents a more detailed control and coordination architecture of standoff target tracking. The computational complexity and in-vehicle communication are analyzed in more detail. Simulation and experimental results are demonstrated in
Section 7, followed by a summary and conclusions in
Section 8.
2. Problem Formulations
Without loss of generality, the following assumptions are made to render the problem simpler and well posed.
Assumption 1: The UAVs fly at a constant altitude, and the target moves in a two-dimensional plane, ignoring its height.
Assumption 2: The position of the moving target is assumed to be known.
Assumption 3: The communication between the UAVs is ideal, without any restrictions such as limited communication range, packet loss, and delay.
Assumption 4: The UAV is equipped with a low-level autopilot that holds constant altitude, and follows the command inputs of the speed and heading rate.
Remark 1: It is assumed that the true value of the target’s position is known, and this is used to estimate the composition velocity of the target’s motion and background wind. However, the velocities of the target and wind are unknown in this paper. We keep the target’s location out of the scope since we aim at providing a solid formulation concerning the problem of coordinated standoff tracking of a ground target. The next endeavor of this work should explore the possibility of using an onboard observation sensor such as a camera to facilitate tracking.
2.1. UAV Model
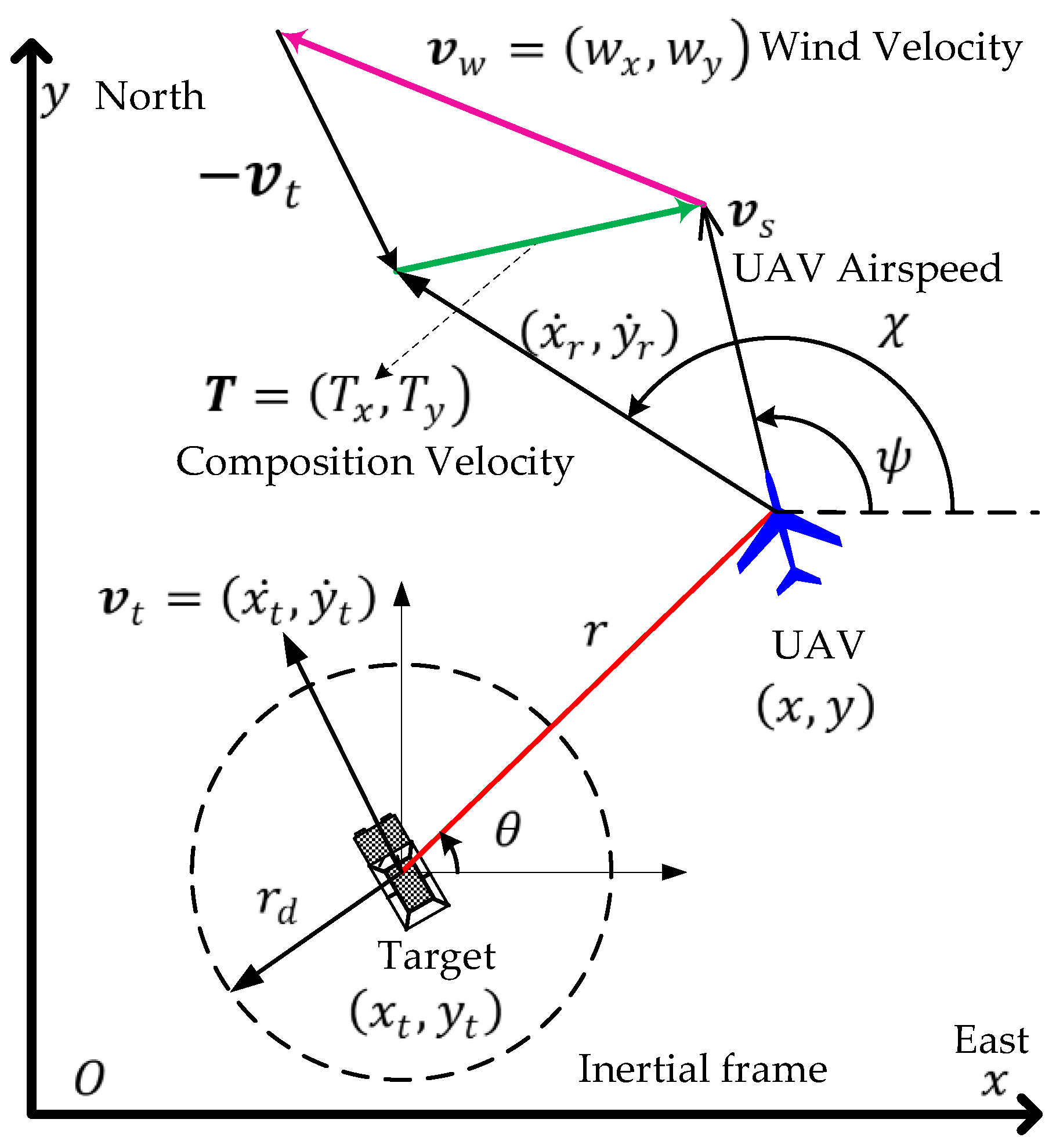
Under the above assumptions, the inertial frame in a two-dimensional plane is constructed. The
x- and
y-axes point east and north, respectively. As shown in
Figure 1, the kinematic of the UAV is expressed as follows:
In Equation (1),
is the background wind velocity.
is the two-dimensional position of the UAV in the inertial frame.
is the UAV heading.
is the true air speed (TAS) of the UAV.
is the heading rate of the UAV.
is the control input signal followed by the low-level autopilot of the UAV. The airspeed and the heading rate should be enforced with the following input constrains.
In Equations (2) and (3), and are the minimum and maximum airspeed, respectively. is the upper bound of the heading rate.
2.2. The Ground-Based Moving Target Model
The ground-based moving target (GMT) is regarded as a mass point whose position, velocity, and acceleration with respect to the inertial frame are denoted by , , and , respectively. Concerning the target, we define only its state variables without providing any further information regarding its kinematic model. Thus, our approach covers the general case of a ground-based target’s motion.
2.3. The Relative Motion Model
The relative motion with background wind is expressed as follows:
The target’s motion and wind are regarded as external disturbances. These two velocities can be combined into a single velocity term, which is called the composition velocity and denoted as
. Equation (4) can be rewritten as follows:
In Equation (5),
is the relative course angle.
is the relative speed.
is the parameter of relative motion in the model. They are calculated as follows:
The relative motion, as shown in Equation (5), can be expressed in polar coordinates as
The distance vector between the UAV and the target is , the relative distance is , and the observation phase is .
2.4. The Objectives of the Control Problem
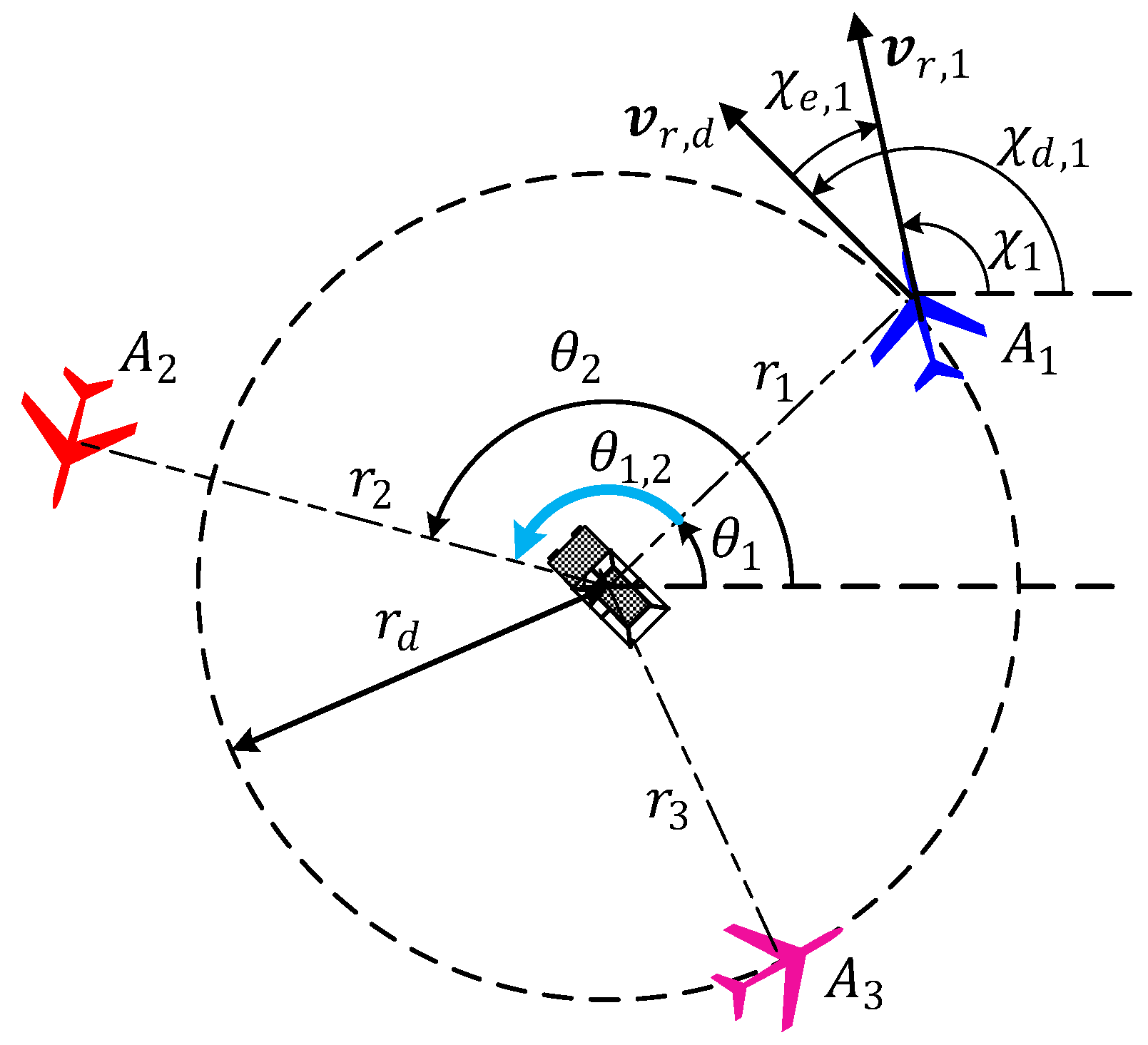
As shown in
Figure 2, there is a team of UAVs (
,
) performing a cooperative standoff tracking mission for a ground-based moving target in unknown background wind. In the process of tracking, on one hand, each UAV needs to circle around the target to maintain a constant relative distance. On the other hand, the hovering UAVs are distributed around the target with equal phase separation to avoid collisions and maximize the coverage of sensors.
The following three control objectives need to be achieved for the multi-UAV cooperative standoff tracking control problem.
- (i)
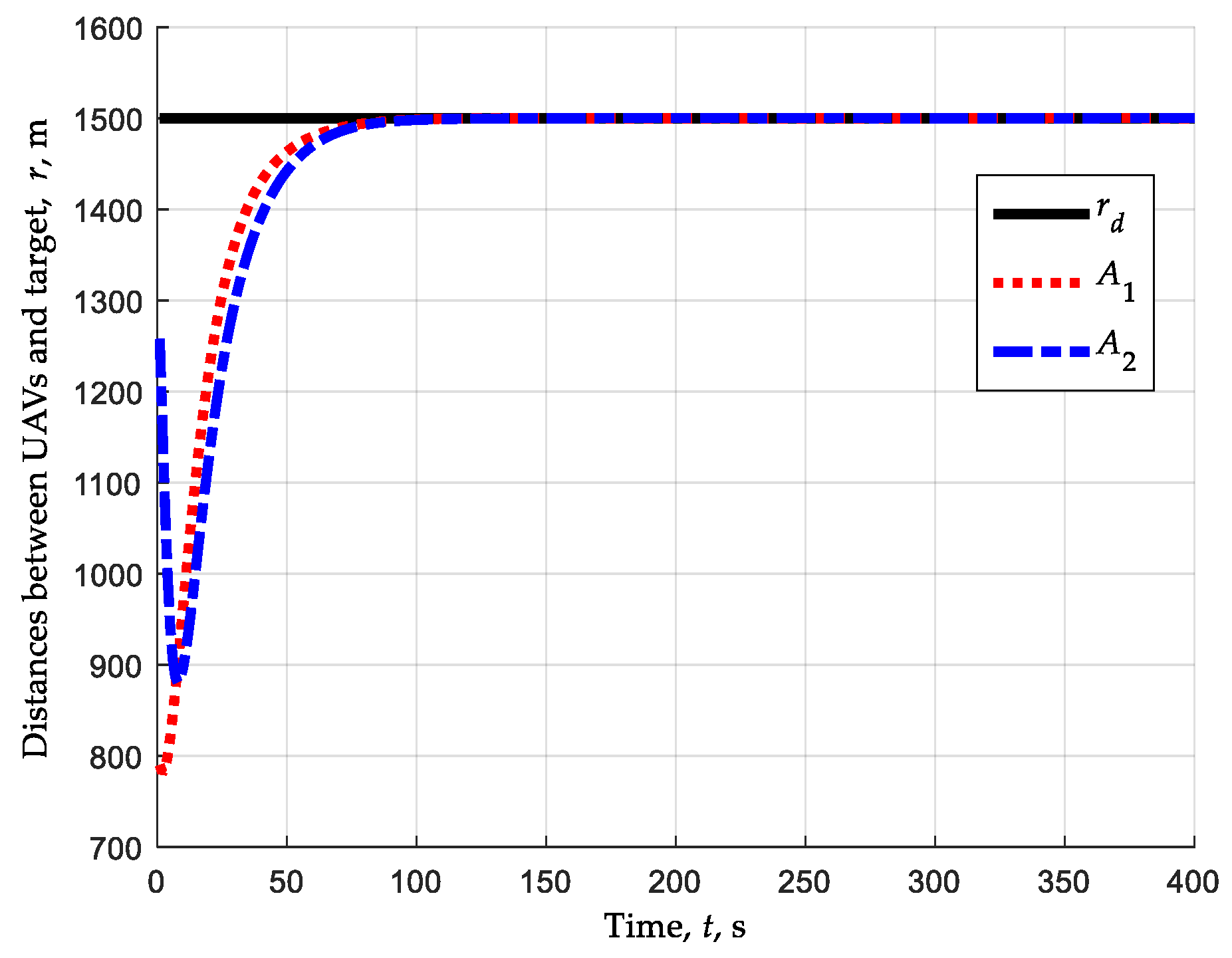
Control objective 1: relative distance regulation. The relative distance between the UAV and the target should be converged to the desired standoff radius .
- (ii)
Control objective 2: relative course convergence. The relative course of the UAV should be converged to the desired relative course to maintain circular motion around the target.
- (iii)
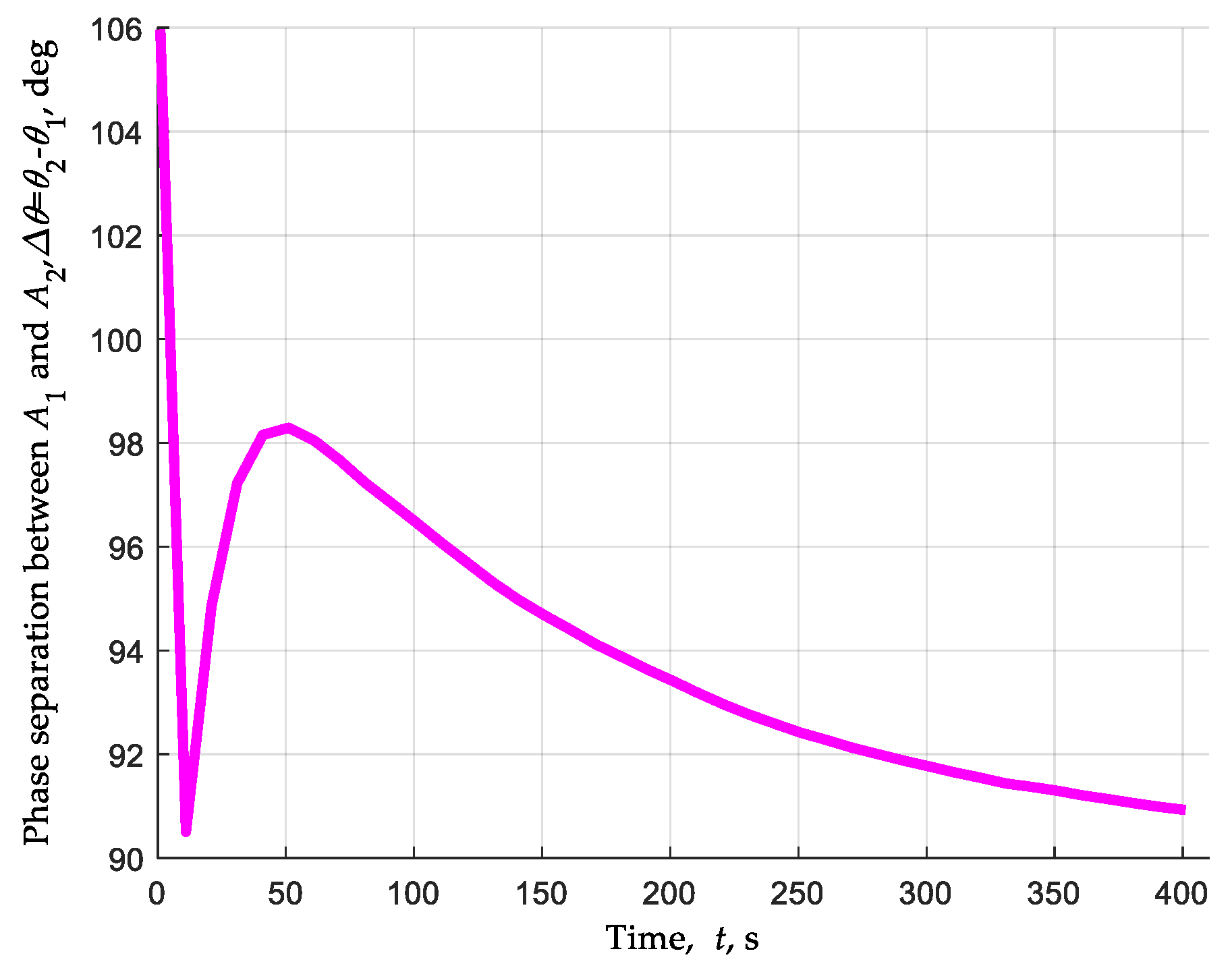
Control objective 3: intervehicle phase separation. The phase separation between and its neighbor should be converged to the optimal configuration .
According to Ref. [
15], the optimal observation configuration
is defined as follows:
Therefore, when studying the multi-UAV cooperative standoff tracking control problem, the following three issues are mainly considered in this paper.
- (a)
How to design the lateral control law subject to the heading rate constraint (Equation (3)) to regulate the relative course of
so that can fly along the standoff circle with radius around the target. This would mean that objectives 1 and 2 would both be achieved.
- (b)
How to design the longitudinal control law subject to the airspeed limitation (Equation (2)) to guarantee that the hovering UAVs are distributed over the standoff circle with equal phase separation. This would mean that control objective 3 would be achieved.
- (c)
How to estimate the composition velocity of wind and target in order to improve the performance of the UAVs during the tracking in the presence of wind and the target’s motion.
3. Standoff Tracking Using a Single UAV
3.1. Guidance Law Based on LGVF
In [
10], the desired relative course is generated from an LGVF that guides the UAV to circle around the target with a predefined standoff radius
. The LGVF for a standoff target tracking can be described as follows:
Define the following vector field angle
:
Equation (15) can be expressed in polar coordinates as follows:
The following guidance law is introduced to guide the UAV to fly along the LGVF in Equation (16):
where the observation phase
is defined by
The feasibility of the guidance law Equation (17) is given by Theorem 1.
Theorem 1: If the guidance law Equation (17) is applied to the relative motion model of the UAV as shown in Equation (9), the relative distance between the UAV and the target asymptotically converges to the predefined standoff radius, i.e., as .
Remark 2: The proof of Theorem 1 is seen in [10]. It can be observed from Theorem 1 that in order to achieve standoff tracking, it is required that the relative course should be always aligned with the desired relative course generated by the guidance law Equation (17).
3.2. Heading Rate Controller Design Subject to the Input Constraints
According to the conclusion of Theorem 1, if is always equal to , the UAV eventually converges to the standoff circle with the desired radius , and performs the standoff target tracking mission successfully. However, in general, there exists an angle error between and initially and the relative course cannot be directly controlled. Thus, we need to design a heading rate controller to guarantee that the relative course eventually converges to . In other words, the proposed heading rate controller indirectly controls by regulating the UAV heading directly.
The relative course error
can be defined by
Differentiating Equation (17) with respect to
leads to the following equation:
According to Equation (9), the dynamic of the azimuth
is obtained as
Differentiating Equation (15) with respect to
:
The desired relative course rate can be obtained by substituting Equations (21) and (22) into Equation (20).
It can be observed from Equation (23) that when
,
. Thus, in order to facilitate the engineering application, let
when
. Based on the relative course error
, Equation (19), and the desired relative course rate
Equation (23), the heading rate controller is designed as follows:
It is observed from Equation (24) that the heading rate controller consists of two main parts: a feedback term and a feedforward term . k > 0 represents the feedback gain. By implementing the heading rate controller as shown in Equation (24), the relative course of the UAV is indirectly controlled to follow the desired one generated by the LGVF. Therefore, in order to ensure that can be followed by the proposed controller, the allowable lower bound of must be determined. Before discussing the allowable lower bound of , Lemma 1 and Lemma 2 are presented.
Lemma 1: If the airspeed of the UAV is faster than the composition velocity, i.e., , the following inequality is true.
Remark 3: The proof of Lemma 1 is seen in Appendix A. Lemma 1 can be used to determine the bound of if the heading rate input constraint is provided. The relevant conclusions are shown in Lemma 2.
Lemma 2: If the heading rate control law given by Equation (24) is applied to the relative motion model of the UAV as shown in Equation (9), there exists a constant , such that: ① , ; ② , .
Remark 4: The proof of Lemma 2 is seen in Appendix B. Lemma 2 provides the bound of the desired heading rate, i.e., ,
.
Based on Lemmas 1 and 2, the allowable bound of is determined in Theorem 2.
Theorem 2: In order to ensure that the UAV successfully performs standoff target tracking by implementing the heading rate controller as shown in Equation (24), and the input signal never violates the heading rate constraint, i.e., , the allowable lower bound of must satisfy the following condition.
Proof: The proof is discussed in two cases in terms of the relative distance.
- (a)
. According to the proposed heading rate control law as shown in Equation (24), when
,
. Now, the desired relative course rate is
. Then, according to Lemma 1, the following can be derived:
It can be observed from Equation (27) that when , if , then is always true. This means that when , the proposed heading rate control satisfies the input constraint as shown in Equation (3).
- (b)
. According to Lemma 2, the desired heading rate
is bounded, and the following inequalities can be derived:
It can be observed from Equation (28) that when , is always true. Thus, the proof for Theorem 2 is completed. □
Remark 5: Theorem 2 provides the formulated inequality between the standoff radius and the maximum heading rate as follows: In other words, due to the input constraint , when the UAV performs the standoff target tracking mission with a constant airspeed , the predefined standoff radius has an allowable lower bound. The minimum allowable standoff radius can be calculated according to Equation (29).
3.3. Stability Analysis of Saturated Heading Rate Control Law
Although Theorem 2 proves that the proposed heading rate control law satisfies the input constraint , whether converges to or not will be investigated in the following. In addition, if as , the convergence speed of also needs further discussion. Thus, Lemma 3 is presented.
Lemma 3: If the UAV described by the relative motion model as shown in Equation (9) implements the heading rate control law given by Equation (24), there exists a positive constant such that ① , ② , .
Remark 6: The proof of Lemma 3 is seen in Appendix C. According to Lemma 3, it can be derived that Equation (30) shows that for every initial relative course error
, the relative course error
as
. Thus, the convergence of the proposed heading rate control law is proved in Lemma 3. In addition, Lemma 3 also gives a lower bound on the convergence rate
, which is defined as follows:
By solving the differential inequality shown in (31), the relative course error
varies according to the following inequality:
Equation (32) can be used to analyze the bound of the relative distance between the UAV and the target. The relevant conclusions are shown in Lemma 4.
Lemma 4: Given an arbitrary initial relative course error , if the UAV described by the relative motion model as shown in Equation (9) implements the heading rate control law given by Equation (24), the relative distance has an upper bound as follows:
where
and
. The proof of Lemma 4 is seen in
Appendix D.
Based on Lemma 3 and Lemma 4, Theorem 3 presents a complete proof for the stability of the proposed heading rate control law with control input constrains.
Theorem 3: Given an arbitrary initial relative course error , if the UAV described by the relative motion model as shown in Equation (9) implements the heading rate control law given by Equation (24), the trajectory of the UAV asymptotically converges to the standoff circle, i.e., and as .
Proof: Let
, and a Lyapunov function be introduced as follows:
Differentiating Equation (34) with respect to time
, the outcome is
- (a)
If
, according to Lemma 4, we obtain
. And according to Lemma 3, we have
. Together, they yield that
It can be observed that from Equation (36), if , then .
- (b)
If
, according to Lemma 3, one obtains
According to the relative motion model of the UAV as shown in Equation (9), we have
Substituting (37) and (38) into (35) yields
For the second term in Equation (39), it holds that
For the third term in Equation (39), it holds that
Substituting Equations (40) and (41) into Equation (39) yields
Solving Equation (42) by completing the square, it is easy to know that if
, then
Therefore, when , the time derivative of the Lyapunov function is always non-positive, i.e., . It can be observed from Equation (43) that implies that and . According to LaSalle’s invariance principle, it can be concluded that and as . This means that the trajectory of the UAV asymptotically converges to the standoff circle. Thus, the proof of Theorem 3 is completed. □
Remark 7: According to Theorem 3, it is concluded that by implementing the proposed heading rate control law, the relative distance and the relative course of the UAV converge to the desired values. This means that the control objectives 1 and 2 proposed in Section 2.2 are achieved, and the UAV tracks the moving target while maintaining the desired standoff distance successfully.
4. Cooperative Standoff Tracking Using Multiple UAVs
When a team of UAVs is used to track a ground-based moving target, coordination between aircraft is necessary to avoid collisions and to maximize sensor coverage of the target. A possible solution to this coordination problem is the so-called “phase separation” approach whereby the UAVs fly along the standoff circle with an equal intervehicle phase separation angle with respect to their neighbors.
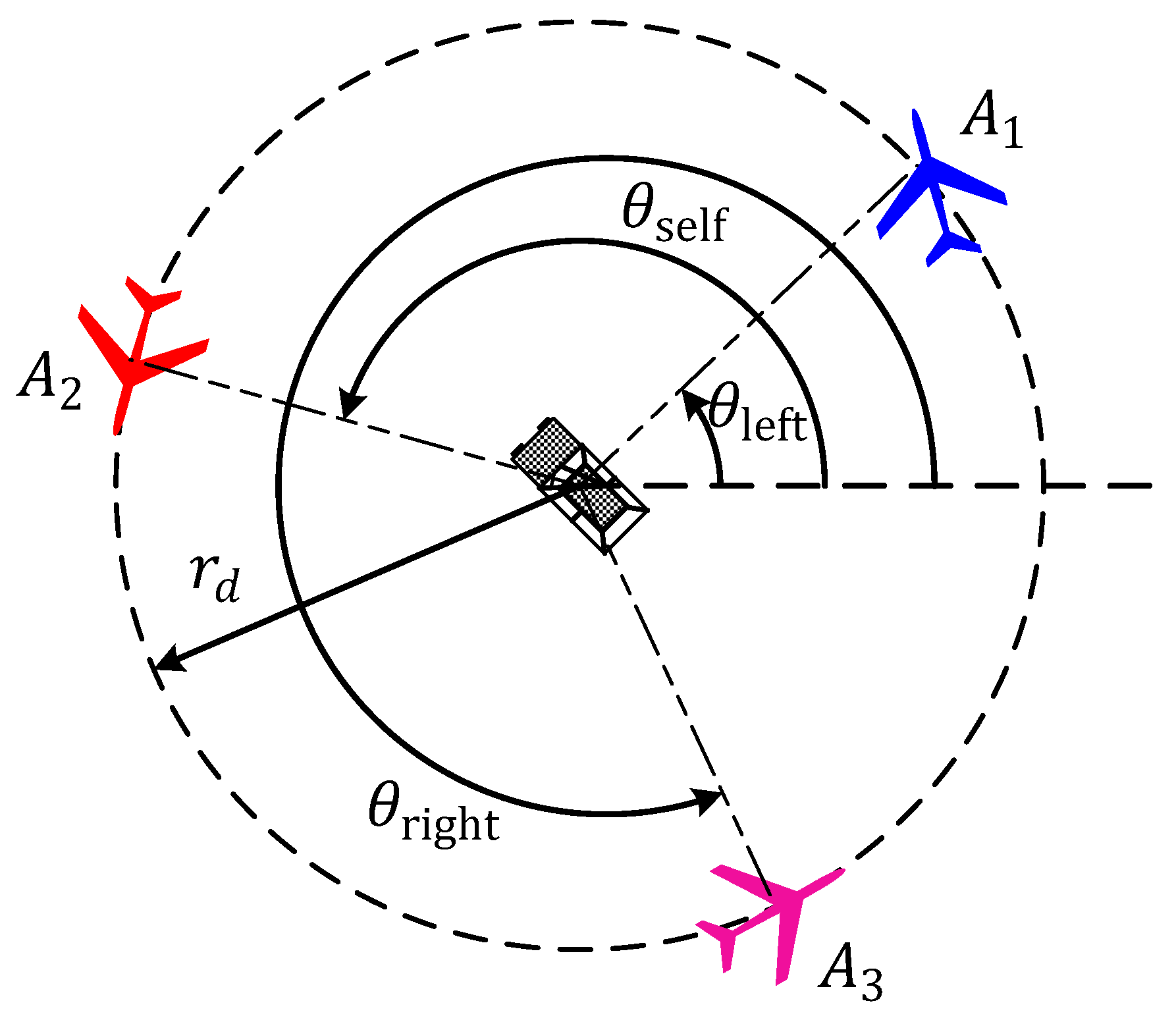
Ref. [
25] proposes a space phase separation algorithm (SPSA) to achieve the desired angular spacing, as illustrated in
Figure 3. The UAVs are distributed counterclockwise in the standoff circle according to the ascending sequence of their unique identity numbers
. Each UAV
independently calculates its airspeed control input
based on its own phase angle
, the phase angle
of its left neighbor
, and the phase angle
of its right neighbor
. For
, its left neighbor is
and its right neighbor is
. For
, its left neighbor is
and its right neighbor is
.
In [
25], the space phase separation angle of
,
, is defined as
. Similarly, the phase separation angle of the right neighbor
is defined as
. The space phase separation error of
,
is defined as
. Similarly, the space phase separation error of the right neighbor
is defined as
. Thus, the airspeed control input of
can be designed as
. Where
,
represents the relative distance between
and the target.
represents the desired airspeed when the team of UAVs hover around the target along a standoff circle synchronously. In this paper,
is called the standoff speed for short.
However, the SPSA method proposed in [
25] has two disadvantages. (i) The airspeed limitation, as shown in Equation (2), is not considered in SPSA; (ii) the space phase separation
and corresponding error
are between
, and thus they are discontinuous. This discontinuity will lead to oscillations in the airspeed control input, resulting in poor tracking performance of the UAVs. This shortcoming has been confirmed by simulation results shown in Figure 9 in [
25]. In order to avoid the discontinuity of the space phase angle, the space phase is replaced by a new notion called the temporal phase, which can also be used to represent the distribution of the UAVs on the standoff circle. Based on the temporal phase, a new temporal phase separation algorithm (TPSA) is proposed to achieve the desired temporal phase separation in a cooperative standoff target tracking mission.
4.1. Airspeed Controller Design for Temporal Phase Separation
In the SPSA method, the angle
is utilized to represent the space phase of the UAV
. The space phase describes the distribution of the UAVs which remain in a circle around the target. Similarly, we can also introduce the temporal phase to equivalently describe the distribution of the UAVs. The temporal phase of
is defined as follows:
where
represents the temporal phase of
.
is the desired relative speed of
with respect to the target and can be expressed as follows.
where
represents the desired heading when
flies along the standoff circle.
In Equation (44), represents the time required for the UAV to complete a circle of flight along the standoff circle with the desired airspeed . is used to normalize the flight time of the UAV and is defined as . It can be observed from Equation (44) that the temporal phase represents the normalized time required for the UAV to fly from space phase angle 0 to the current space phase angle along the standoff circle.
Therefore, the temporal phase separation between
and its neighbor is defined by the difference in their temporal phases.
Suppose there are
UAVs, a leader–follower formation strategy is used in this paper. Without loss of generality, it assumes that
is the leader and its airspeed is the desired one, e.g.,
, and is held constant. Then,
follows
, and adjusts its airspeed to achieve the desired temporal separation with its leader
. Similarly,
follows its leader
and achieves the desired temporal separation by varying its airspeed. The temporal separation error is defined as follows:
where
represents the desired separation. The airspeed input is designed as follows:
where
represents the airspeed increment of the UAV in one time step, and it reflects the performance of the onboard autopilot.
Before verifying that the proposed controller Equation (49) always satisfies the minimum and maximum airspeed constraints in Equation (2), Assumption 5 is introduced as follows:
Assumption 5: There exist appropriate values of and , so that the following constraints are satisfied, and .
Remark 8: Generally speaking, the airspeed of the UAV is always faster than the target speed and the wind speed, thus the constraint could be satisfied. In addition, is dependent on the performance of the autopilot, which definitely satisfies the requirement of . Therefore, Assumption 5 is reasonable. Based on Assumption 5, the following Theorem 4 is proposed.
Theorem 4: If the standoff speed and the speed increment satisfy the inequality conditions presented in Assumption 5, then the proposed controller given by Equation (49) always satisfies the minimum and maximum airspeed constraints given by Equation (2).
Proof: According to Equation (49), let , where and . Due to , then and . If , then , i.e., .
Considering
, yields
Substituting (50) into (51) yields
According to Assumption 5, it is obtained that , which implies that . Therefore, it can be concluded that the proposed airspeed control law given by Equation (49) always satisfies the minimum and maximum airspeed constraints given by Equation (2). Thus, the proof for Theorem 3 is completed. □
4.2. Stability Analysis of Airspeed Control Law
A stability analysis of the airspeed control law is provided in the following Theorem 5.
Theorem 5: For the relative motion model of a UAV described in Equation (9), if the heading rate control law given by Equation (24) and the cooperative airspeed control laws given by Equation (49) are applied to a team of UAVs, then each aircraft can achieve equal temporal separation and fly along the standoff circle, i.e., as , , .
Proof: Differentiating Equation (48) with respect to time
yields
According to the relative motion model given by Equation (9), one obtains
Suppose that aircraft
(
). implementing the proposed heading rate control law given by Equation (24), has been converged on the standoff circle, i.e.,
. Therefore,
Let
, we obtain
According to the cooperative airspeed control laws given by Equation (49), one has
Substituting Equation (57) into Equation (56) yields
where
. Substituting Equation (58) into Equation (55) and setting
yields
Let
and
, one derives
It is easy to prove that the cascade connected system shown in Equation (60) is asymptotically stable, i.e., as . Thus, the proof for Theorem 5 is completed. □
6. Decentralized Control and Coordination Architecture of Standoff Target Tracking
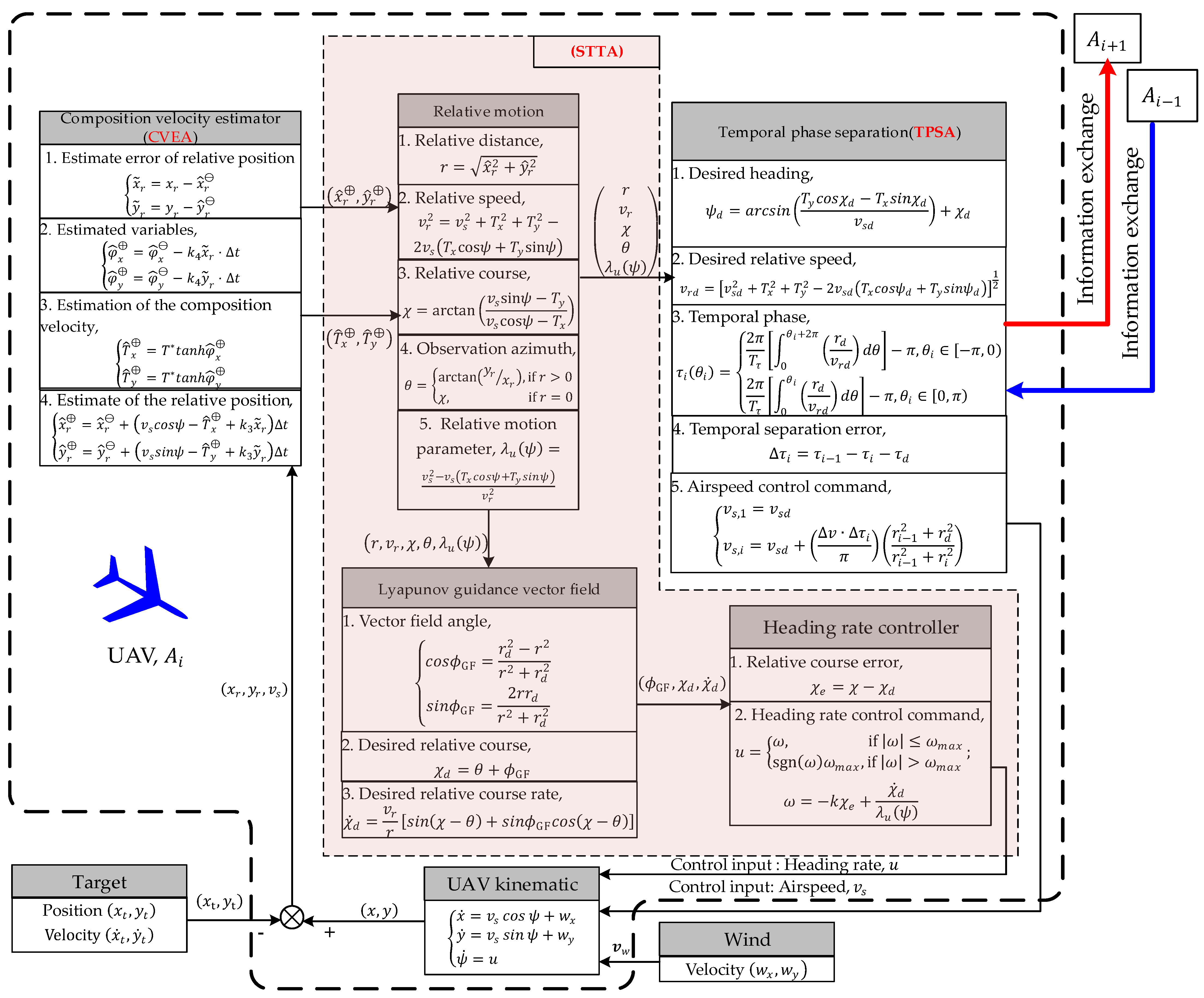
A more detailed control and coordination architecture of the proposed coordinated standoff target tracking algorithm (CSTTA) is shown in
Figure 6. The proposed CSTTA is scalable and does not require significant computation and communication power.
On one hand, it can be observed from
Figure 6 that all variables or signals are given their analytic solutions in the CSTTA. This is different from the MPC method proposed in Ref. [
16]; the CSTTA proposed in this paper does not require an iterative optimization process, so it has a lower computational complexity. Therefore, the proposed CSTTA can be used in multi-UAV collaborative applications with high real-time requirements. It is worth noting that the temporal phase can be obtained by implementing Romberg integration, which has low computational complexity and will not increase the computational burden of the whole system.
On the other hand, it can be observed from
Figure 6 that the control and coordination architecture is decentralized. In a distributed fashion, each UAV only transmits messages to its neighbors that are in its communication range. In the proposed CSTTA,
computes its own temporal separation error
by exchanging information with its leader
. And then
generates its airspeed command
and exchanges this command with its follower
. Therefore, the proposed CSTTA is a feasible approach to reduce the communication between UAVs.
It is worth noting that in our paper it is assumed that the communication between UAVs is perfect, without any restrictions. However, in the real-world, the wireless communication network between UAVs is vulnerable to errors and time delays, which may lead to performance degradation or even instability. In future work, we will analyze the effects of the potential communication constraints, which is a critical issue for the successful operation of multiple UAVs.
As shown in
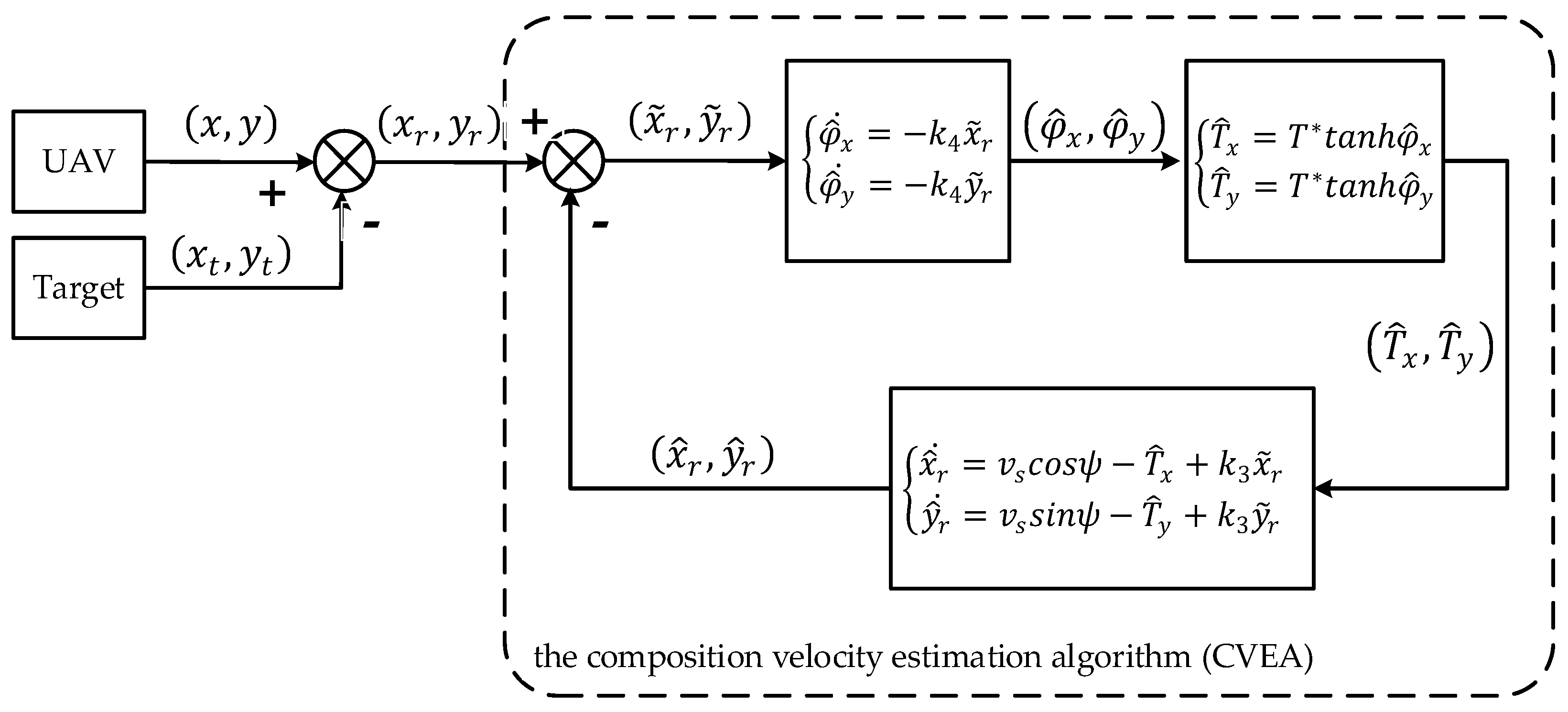
Figure 6, the proposed CSTTA method includes three parts, as follows: (i) the saturated heading rate controller, which is the standoff target tracking algorithm (STTA) for one single UAV; (ii) the airspeed controller based on the temporal phase separation algorithm (TPSA), which is used to achieve the desired temporal phase separation in cooperative standoff target tracking with multiple UAVs; (iii) the composition velocity estimation algorithm (CVEA), which is used to ensure the stability of the circular trajectory in the presence of a moving target and time-varying background wind.




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}