
A GPS-Adaptive Spoofing Detection Method for the Small UAV Cluster

Abstract
:1. Introduction
1.1. Problem Statement
1.2. Contribution
- The GPS spoofing attacks for the UAV cluster are analyzed and classified, and the various complex attack scenarios under a cluster environment are simulated. To the best of our knowledge, research into the problem of spoofing attacks on the UAV cluster from multiple spoofing sources, as considered in this paper, is novel.
- A novel GPS-adaptive spoofing detection (ASD) algorithm which includes two detection mechanisms, GPS Spoofing Signal detection (SSD) mechanism and Relative Security UAV Optimal Marking (RSOM) mechanism, is proposed. The algorithm can switch between different detection mechanisms to effectively detect GPS spoofing signals according to the characteristics of GPS spoofing attack initiated by the attacker in different attack scenarios.
- A modeling and hardware simulation based technique has been studied to ensure the mission safety of UAV cluster. In fact, how to ensure the mission safety of UAV cluster in GPS spoofing environment is still in its infant stage. This work provides theoretical support and an application guidance for the development and application of this new task model.
2. Related Work
3. System Models
3.1. The Small UAV Cluster Model
- UAV Position representation in the Cartesian coordinate systemIt is known that in the position calculation, the original output data of the GPS receiver cannot directly be used in the calculation. Instead, it needs to be transformed from the spherical coordinate system to the Cartesian coordinate system.Suppose that D is a point on the Earth’s surface and the spherical coordinate of D is , where r is the radius of the earth. It is shown in Figure 2 that ∠ = , ∠ = , and the point D is expressed as follows:If an UAV in the cluster reaches the specified position at H, which is vertically above point D, then it broadcasts the position :
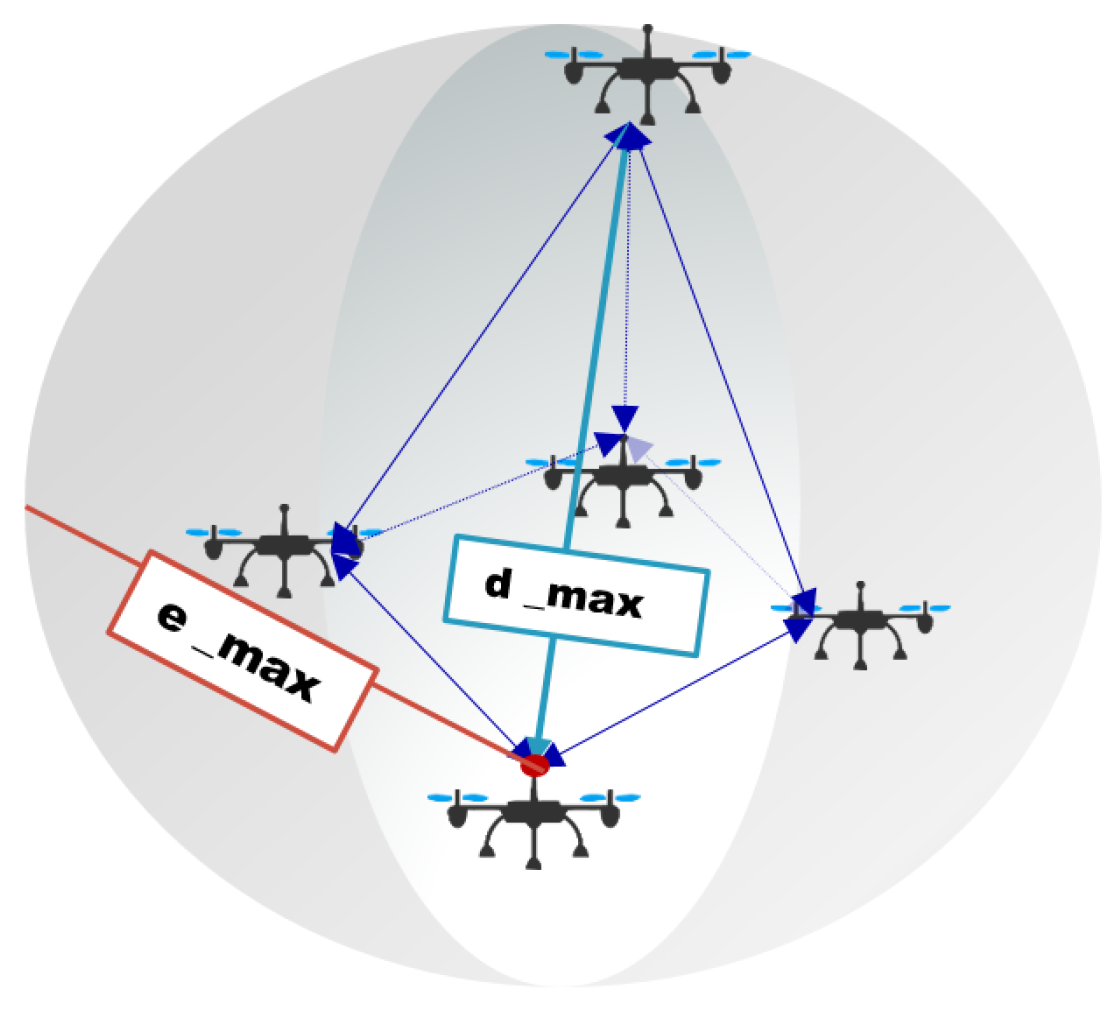
- Indication of the relative position between UAVsThe object of formation design is mainly to achieve a small cluster of UAVs. Thus, the full connection mode is adopted for the information interaction between UAVs. For model M = , as shown in Figure 3, the position relationship between any two UAVs can be expressed as a four-dimensional vector:Thus, if , the following equation holds:
3.2. Adversary Model: GPS Spoofing Principle
- Public: the spoofer does not try to cover up the attack, no matter whether the change between the customized deceptive GPS positioning information and the real GPS positioning information is within a reasonable range. It only tries to capture the target faster.
- Covert: the spoofer tries to avoid detection by sending cleverly crafted deceptive signals that match the actual signal in terms of output power and other parameters. Thus, the spoofer can prevent the target from triggering a fault detection alarm.
4. Proposed Method
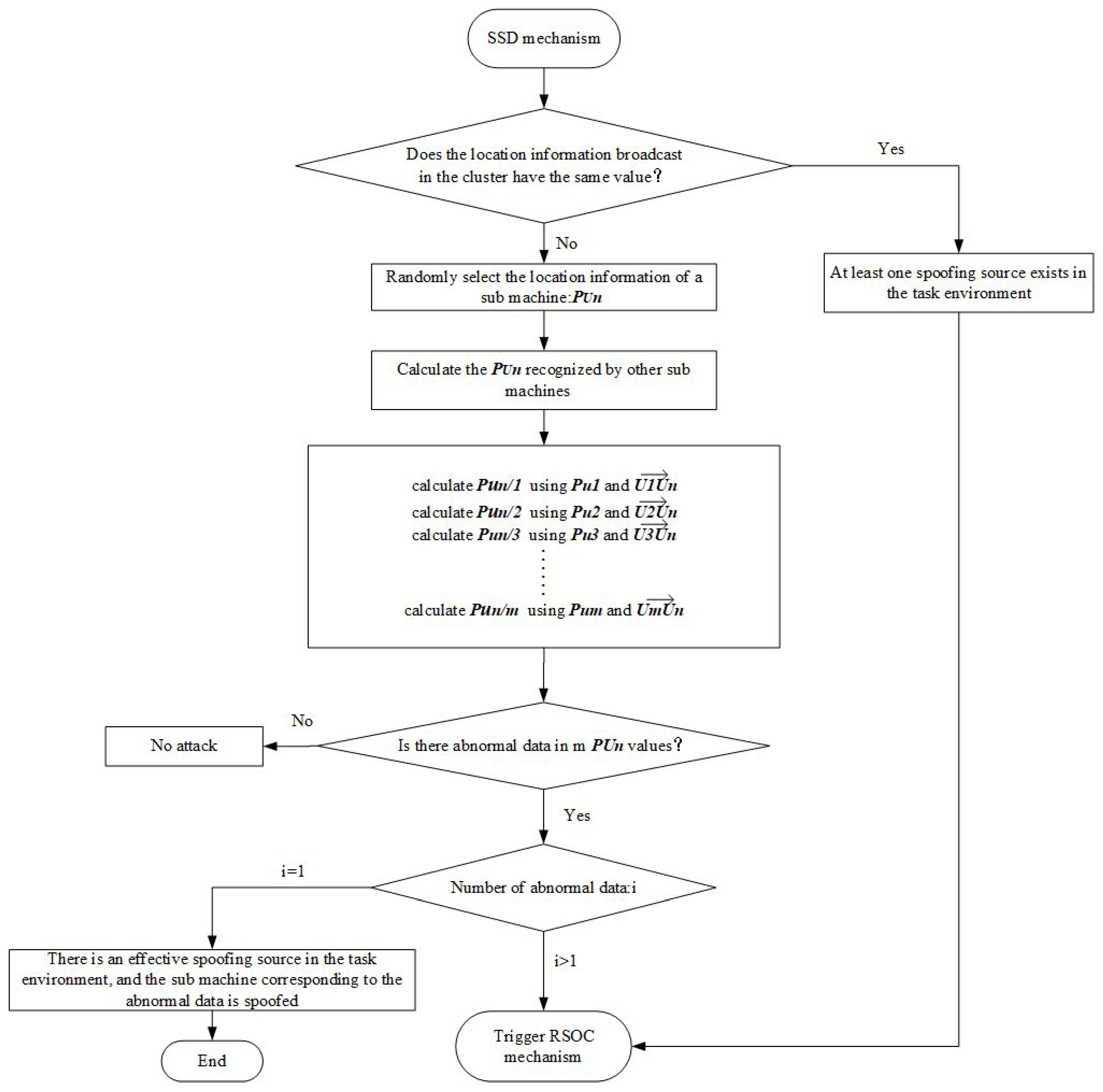
4.1. SSD Mechanism Based on Cluster Cooperative Positioning
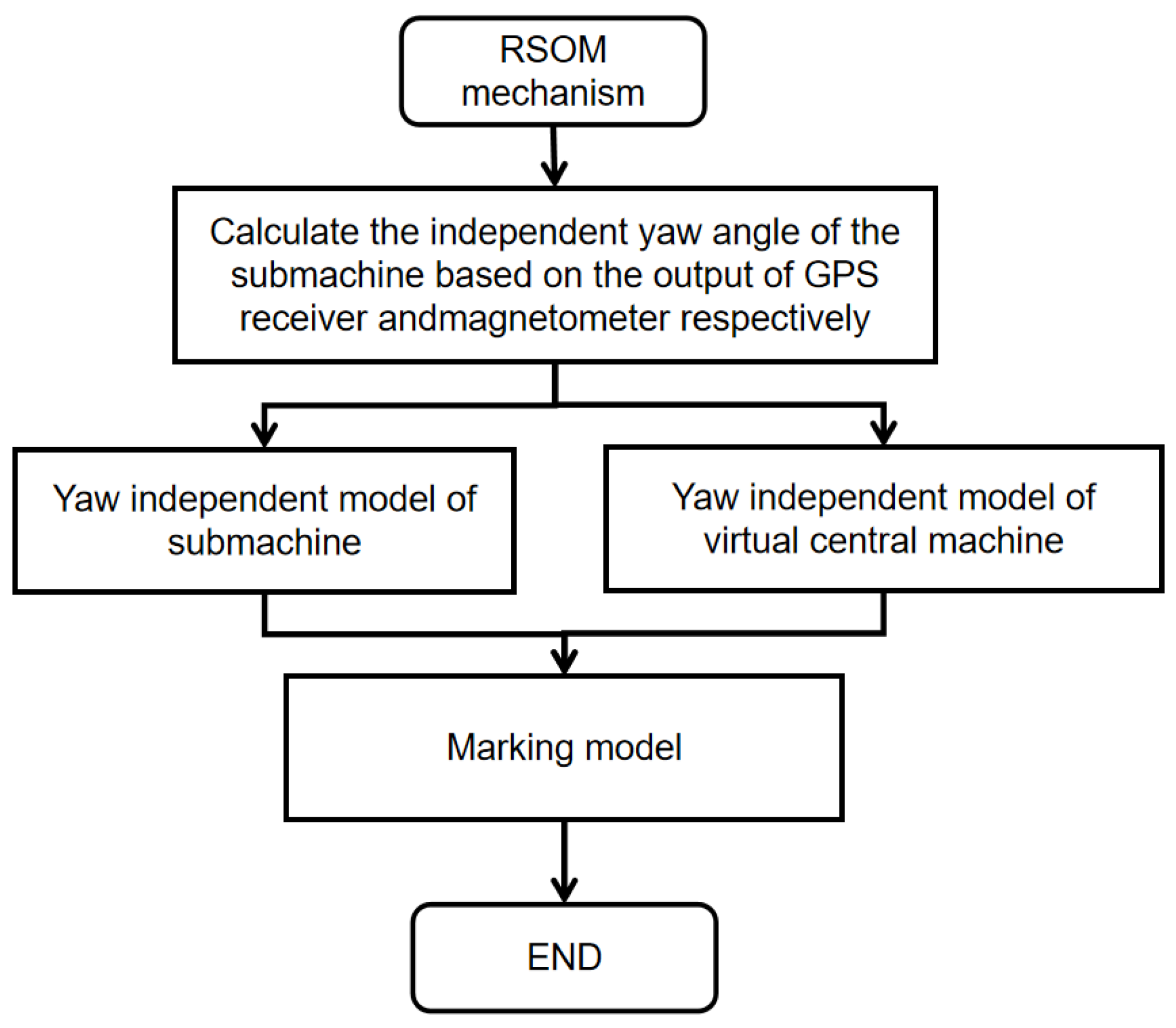
4.2. RSOM Mechanism
| Algorithm 1 Algorithm for obtaining obtain based on GPS receiver input data |
|
| Algorithm 2 Algorithm for obtaining the based on magnetometer attitude measurement data |
|
- Independent yaw model of the submachineIn the independent yaw model of submachine, the yaw angle of the submachine in the cluster is defined as:where and can be obtained by algorithms 2 and 3. ∈[0,1] is a weighting factor.The basic idea of the linear complementary filter is to use their complementary features to obtain more accurate altitude angle. In this model, the linear complementary filter [36,37,38] is only used as a known tool, so it is only briefly explained without showing the detailed reasoning process. At time k, after obtaining , the yaw angle is estimated as:where represents the time constant, represents the sampling period used by the filter, and represents the component of the angular velocity in the z direction in the earth fixed coordinate system [39]. Take , then . The complementary filter of the yaw angle is expressed as follows:
- Independent yaw model of the virtual central machineGPS provides external information to the UAV. It belongs to the experimental group of this subject and needs to be verified. Therefore, we need a control group in the model. For the flight altitude estimation of the whole cluster, we only use the internal information of the UAV, namely the magnetometer. The yaw representation of the flight altitude of the whole cluster is realized by fusing the yaw altitude of each member machine with a weighted average method to form a new yaw altitude model. It can be considered that we have selected a virtual central machine for the cluster, and the new yaw altitude model is the yaw representation of the virtual central machine; its physical meaning is to represent the flight altitude of the cluster to the greatest extent.Here:Input to Equations (7) and (8) to obtain . Then, the independent yaw model of the virtual central machine, , can be expressed as follows:where is the error confidence obtained by the exponential standardization of the function to the current error of each submachine magnetometer, and . is the final weight coefficient of each submachine.
- Marking modelThe difference between the results of the independent yaw model of the virtual central machine and that of the submachine is used as the basis for the results of the calibration model:Note that , corresponding to the submachine is the optimal marking of the making model to the relative security of the UAV.
4.3. Time Complexity Analysis
5. Simulation and Evaluation
5.1. Experimental Configuration
- Cluster size: 5;
- Relative position relationship between machines: [ l];
- Cluster velocity: 5 m/s;
- Cluster motion height: 50 m;
- Cluster motion direction: all submachines are consistent;
- Maximum distance between machines: 20 m;
- Maximum effective range of communication: 500 Hz.
5.2. Experimental Deployment
- Scenario 1: Baseline model test: This case is to obtain the normal movement log of the UAV cluster in the mission scenario without any attack or threat, which can be used as a baseline to detect the threat later.
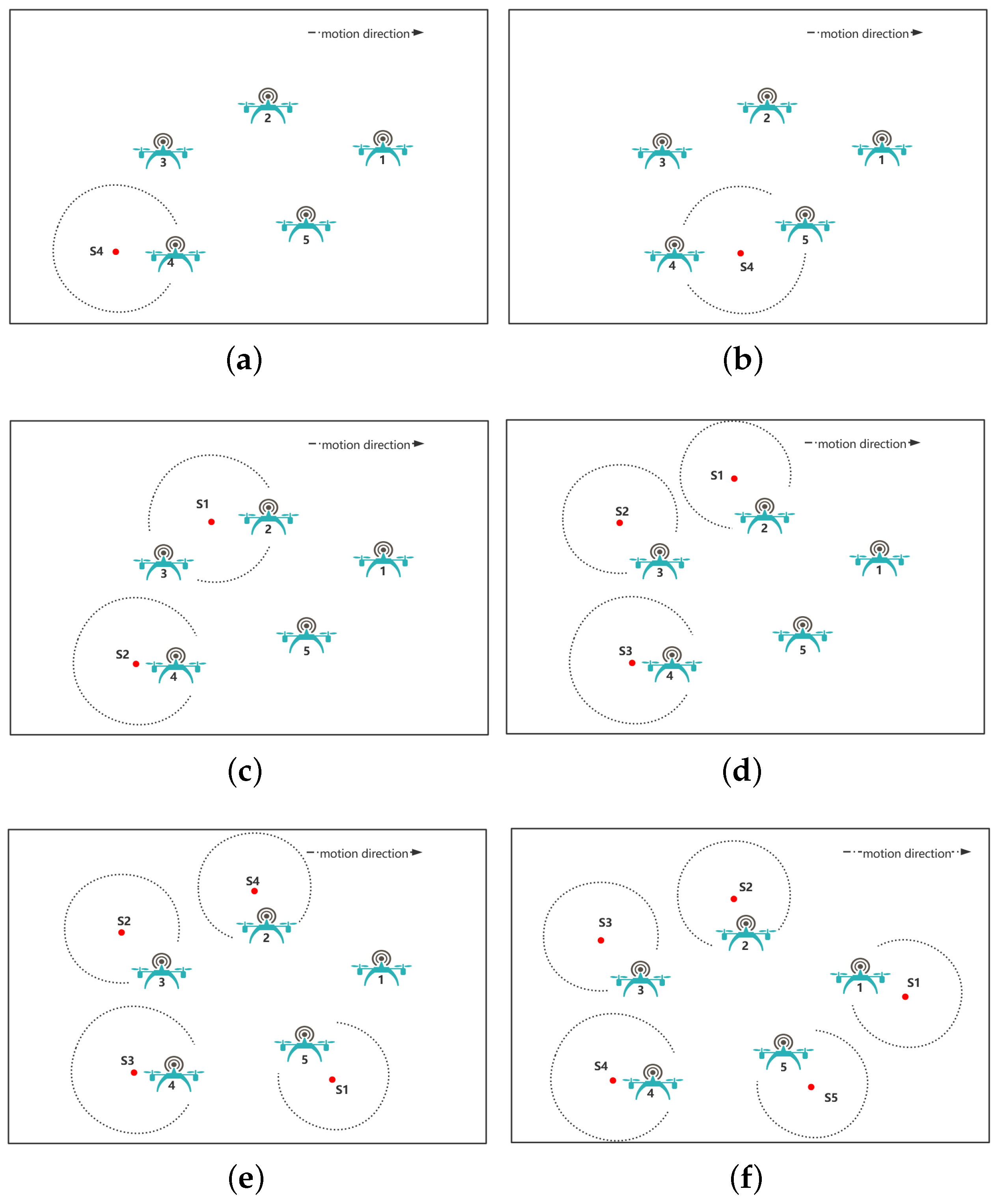
- Scenario 2: Adversary model test: Note that the five spoofing sources work exactly the same, so only one of them is randomly selected for validity testing. In this scenario, the deployment location of S4 is shown in Figure 6. In Figure 6a, there is only one submachine in the signal radiation range of S4, while in Figure 6b, there are more submachines in its signal radiation range. Such a setup can test not only the effectiveness of the spoofing source, but also whether the spoofing source can spoof all submachines within its signal radiation range. In the experiment, after the cluster enters a stable mission state, we do not start the ASD algorithm, but we start S4, after which we observe the movement state of the cluster and save the flight logs.
- Scenario 3: Contrast experiment of scenario 2: In this case, the deployment location of S4 is shown in Figure 6a; that is, there is only one submachine in the signal radiation range of S4. Different from the setting of scenario 2, after the cluster enters a stable mission state, we first start the ASD algorithm and then start S4. After that, we record the movement state of the cluster and save the flight logs.
- Scenario 4: Testing of two spoofing sources: In this case, the deployment locations of the two spoofing sources (i.e., S1 and S2) are shown in Figure 6c. It can be observed from Figure 6c that the signal radiation range of these two spoofing sources contains three submachines. Here, we will use S1 and S2 to attack them. In the experiment, after the cluster enters a stable mission state, we start the ASD algorithm and turn on the two spoofing sources. Then, the movement state of the cluster and the flight logs will be recorded.
- Scenario 5: Testing of three spoofing sources: In this case, the deployment locations of the three spoofing sources (i.e., S1, S2, and S3) are shown in Figure 6d. The rest of the operation is the same as in Scenario 4.
- Scenario 6: Testing of four spoofing sources: In this case, the deployment locations of the three spoofing sources (i.e., S1, S2, S3, and S4) are shown in Figure 6e. The rest of the operation is the same as in Scenario 4.
- Scenario 7: Testing of the full cluster spoofed: In this case, we directly considered and deployed the most complex attack scenario with five spoofing sources (i.e., S1, S2, S3, S4, and S5); as shown in Figure 6f, after the cluster enters a stable mission state, we start the ASD algorithm and the five spoofing sources. It can be observed that the cluster suddenly oscillates in formation after a period of time, but soon returns to its original form; however, the overall motion direction is off the expected trajectory. At that point, the UAV cluster sent a distress signal to the ground station. Again, we keep the flight logs.
5.3. Experimental Results and Analysis
5.4. Comparative Analysis of the Method’s Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Gaspar, J.; Ferreira, R.; Sebastião, P.; Souto, N. Capture of UAVs Through GPS Spoofing Using Low-Cost SDR Platforms. Wirel. Pers. Commun. 2020, 115, 2729–2754. [Google Scholar] [CrossRef]
- Na, Z.; Liu, Y.; Shi, J.; Liu, C.; Gao, Z. UAV-Supported Clustered NOMA for 6G-Enabled Internet of Things: Trajectory Planning and Resource Allocation. IEEE Internet Things J. 2021, 8, 15041–15048. [Google Scholar] [CrossRef]
- Yi, W.; Liu, Y.; Deng, Y.; Nallanathan, A. Clustered UAV Networks With Millimeter Wave Communications: A Stochastic Geometry View. IEEE Trans. Commun. 2020, 68, 4342–4357. [Google Scholar] [CrossRef]
- Basan, E.; Basan, A.; Nekrasov, A.; Fidge, C.; Sushkin, N.; Peskova, O. GPS-Spoofing Attack Detection Technology for UAVs Based on Kullback–Leibler divergence. Drones 2022, 6, 8. [Google Scholar] [CrossRef]
- Jetto, J.; Gandhiraj, R.; Sundaram, G.; Soman, K.P. Software Defined Radio-Based GPS Spoofing Attack Model on Road Navigation System. In Soft Computing and Signal Processing; Spinger: Singapore, 2022. [Google Scholar]
- Huang, K.W.; Wang, H.M. Combating the Control Signal Spoofing Attack in UAV Systems. IEEE Trans. Veh. Technol. 2018, 67, 7769–7773. [Google Scholar] [CrossRef]
- Mekdad, Y.; Aris, A.; Babun, L.; Fergougui, A.E.; Conti, M.; Lazzeretti, R.; Uluagac, A.S. A Survey on Security and Privacy Issues of UAVs. arXiv 2021, arXiv:2109.14442. [Google Scholar] [CrossRef]
- Akos, D.M. Who’s Afraid of the Spoofer? GPS/GNSS Spoofing Detection via Automatic Gain Control (AGC). Navigation 2012, 59, 281–290. [Google Scholar] [CrossRef]
- Pardhasaradhi, B.; Srihari, P.; Aparna, P. Spoofer-to-Target Association in Multi-Spoofer Multi-Target Scenario for Stealthy GPS Spoofing. IEEE Access 2021, 9, 108675–108688. [Google Scholar] [CrossRef]
- Manesh, M.R.; Kenney, J.; Hu, W.; Devabhaktuni, V.K.; Kaabouch, N. Detection of GPS Spoofing Attacks on Unmanned Aerial Systems. In Proceedings of the 16th IEEE Annual Consumer Communications & Networking Conference, CCNC 2019, Las Vegas, NV, USA, 11–14 January 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Williamson, M. GPS Spoofing. Ph.D. Thesis, Utica College, Utica, NY, USA, 2014. [Google Scholar]
- She, F.; Zhang, Y.; Shi, D.; Zhou, H.; Xu, T. Enhanced Relative Localization Based on Persistent Excitation for Multi-UAVs in GPS-Denied Environments. IEEE Access 2020, 8, 148136–148148. [Google Scholar] [CrossRef]
- Shafique, A.; Mehmood, A.; Elhadef, M. Detecting Signal Spoofing Attack in UAVs Using Machine Learning Models. IEEE Access 2021, 9, 93803–93815. [Google Scholar] [CrossRef]
- Meng, L.; Yang, L.; Ren, S.; Tang, G.; Zhang, L.; Yang, F.; Yang, W. An Approach of Linear Regression-Based UAV GPS Spoofing Detection. Wirel. Commun. Mob. Comput. 2021, 2021, 5517500. [Google Scholar] [CrossRef]
- Bada, M.; Boubiche, D.E.; Lagraa, N.; Kerrache, C.A.; Imran, M.; Shoaib, M. A policy-based solution for the detection of colluding GPS-Spoofing attacks in FANETs. Transp. Res. Part A Policy Pract. 2021, 149, 300–318. [Google Scholar] [CrossRef]
- Humphreys, T.E.; Ledvina, B.M.; Psiaki, M.L.; O’Hanlon, B.W.; Kintner, P.M. Assessing the Spoofing Threat: Development of a Portable GPS Civilian Spoofer. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Guenther, C. A Survey of Spoofing and Counter-Measures. Navigation 2015, 61, 159–177. [Google Scholar] [CrossRef]
- Manfredini, E.G.; Akos, D.M.; Chen, Y.H.; Lo, S.; Enge, P. Effective GPS Spoofing Detection Utilizing Metrics from Commercial Receivers. In Proceedings of the 2018 International Technical Meeting of the Institute of Navigation, Reston, VA, USA, 29 January–1 February 2018. [Google Scholar]
- Jovanovic, A.; Botteron, C.; Fariné, P.A. Multi-test Detection and Protection Algorithm Against Spoofing Attacks on GNSS Receivers. In Proceedings of the Position, Location & Navigation Symposium-Plans, IEEE/ION, Monterey, CA, USA, 5–8 May 2014. [Google Scholar]
- Wesson, K.; Rothlisberger, M.; Humphreys, T. Practical Cryptographic Civil GPS Signal Authentication. Navigation 2012, 59, 177–193. [Google Scholar] [CrossRef]
- Kai, J.; Schafer, M.; Moser, D.; Lenders, V.; Schmitt, J. Crowd-GPS-Sec: Leveraging Crowdsourcing to Detect and Localize GPS Spoofing Attacks. In Proceedings of the 2018 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 20–24 May 2018. [Google Scholar]
- Montgomery, P.Y.; Humphreys, T.E.; Ledvina, B.M. Receiver-Autonomous Spoofing Detection: Experimental Results of a Multi-Antenna Receiver Defense Against a Portable Civil GPS Spoofer. In Proceedings of the 2009 International Technical Meeting of The Institute of Navigation, Anaheim, CA, USA, 26–28 January 2009. [Google Scholar]
- Jansen, K.; Tippenhauer, N.O.; Ppper, C. Multi-receiver GPS spoofing detection: Error models and realization. In Proceedings of the the 32nd Annual Conference, Los Angeles, CA, USA, 5–8 December 2016. [Google Scholar]
- Rao, H.; Wang, S.; Hu, X.; Tan, M.; Da, H.; Cheng, J.; Hu, B. Self-Supervised Gait Encoding with Locality-Aware Attention for Person Re-Identification. In Proceedings of the International Joint Conference on Artificial Intelligence, Yokohama, Japan, 11–17 July 2020. [Google Scholar]
- Xu, S.; Rao, H.; Peng, H.; Jiang, X.; Guo, Y.; Hu, X.; Hu, B. Attention-Based Multilevel Co-Occurrence Graph Convolutional LSTM for 3-D Action Recognition. IEEE Internet Things J. 2021, 8, 15990–16001. [Google Scholar] [CrossRef]
- Rao, H.; Xu, S.; Hu, X.; Cheng, J.; Hu, B. Augmented Skeleton Based Contrastive Action Learning with Momentum LSTM for Unsupervised Action Recognition. Inf. Sci. 2021, 569, 90–109. [Google Scholar] [CrossRef]
- Eldosouky, A.R.; Ferdowsi, A.; Saad, W. Drones in Distress: A Game-Theoretic Countermeasure for Protecting UAVs Against GPS Spoofing. IEEE Internet Things J. 2020, 7, 2840–2854. [Google Scholar] [CrossRef]
- Liang, C.; Miao, M.; Ma, J.; Yan, H.; Li, T. Detection of GPS Spoofing Attack on Unmanned Aerial Vehicle System. In Proceedings of the Machine Learning for Cyber Security: Second International Conference, ML4CS 2019, Xi’an, China, 19–21 September 2019. [Google Scholar]
- Mykytyn, P.; Brzozowski, M.; Dyka, Z.; Langendoerfer, P. GPS-Spoofing Attack Detection Mechanism for UAV Swarms. arXiv 2023, arXiv:2301.12766. [Google Scholar]
- Chen, M.; Mozaffari, M.; Saad, W.; Yin, C.; Debbah, M.; Hong, C.S. Caching in the Sky: Proactive Deployment of Cache-Enabled Unmanned Aerial Vehicles for Optimized Quality-of-Experience. IEEE J. Sel. Areas Commun. 2017, 35, 1046–1061. [Google Scholar] [CrossRef]
- Su, J.; He, J.; Cheng, P.; Chen, J. A Stealthy GPS Spoofing Strategy for Manipulating the Trajectory of an Unmanned Aerial Vehicle. IFAC-PapersOnLine 2016, 49, 291–296. [Google Scholar] [CrossRef]
- Zeng, K.C.; Shu, Y.; Liu, S.; Dou, Y.; Yang, Y. A Practical GPS Location Spoofing Attack in Road Navigation Scenario. In Proceedings of the the 18th International Workshop, Sonoma, CA, USA, 21–22 February 2017. [Google Scholar]
- Liu, Q.; Chen, S.; Wang, G.; Lan, Y. Drift Evaluation of a Quadrotor Unmanned Aerial Vehicle (UAV) Sprayer: Effect of Liquid Pressure and Wind Speed on Drift Potential Based on Wind Tunnel Test. Appl. Sci. 2021, 11, 7258. [Google Scholar] [CrossRef]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned Aircraft Capture and Control Via GPS Spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Kj, M.; Wittenmark, B. Computer-Controlled Systems: Theory and Design, 2nd ed.; Elsevier: New York, NY, USA, 1990. [Google Scholar]
- Wu, J.; Zhou, Z.; Fourati, H.; Li, B.; Liu, M. Generalized Linear Quaternion Complementary Filter for Attitude Estimation From Multisensor Observations: An Optimization Approach. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1330–1343. [Google Scholar] [CrossRef]
- Kottath, R.; Narkhede, P.; Kumar, V.; Karar, V.; Poddar, S. Multiple Model Adaptive Complementary Filter for Attitude Estimation. Aerosp. Sci. Technol. 2017, 69, 574–581. [Google Scholar] [CrossRef]
- Yoo, T.S.; Hong, S.K.; Yoon, H.M.; Park, S. Gain-Scheduled Complementary Filter Design for a MEMS Based Attitude and Heading Reference System. Sensors 2011, 11, 3816–3830. [Google Scholar] [CrossRef] [PubMed]
- Kang, C.W.; Chan, G.P.; Filter, K. Attitude estimation with accelerometers and gyros using fuzzy tuned Kalman filter. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Explanation |
|---|---|
| M | A set of UAVs |
| One of the members in M | |
| The largest distance between each two UAVs in M | |
| The maximum effective range of UAV broadcasting | |
| D | The parking position of UAV on the ground |
| The hovering position of UAV in the air | |
| The position relationship between any two UAVs in M | |
| The instance maximum drifted distance |
| Enemy deployment strategy and spoofing data record | ||||
|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 |
| - | - | - | 25.5 28.2 | - |
| - | - | - | 27.5 29.2 | - |
| - | - | - | 29.5 30.2 | - |
| - | - | - | 31.5 31.2 | - |
| Position information received by the GPS receiver of each submachine in the cluster | ||||
| No. 1 | No. 2 | No. 3 | No. 4 | No. 5 |
| 32.87953077 34.30943511 | 30.02636122 36.38238413 | 27.17319167 34.30943511 | 28.26300546 30.95533315 | 31.78971698 30.95533315 |
| 32.59085634 34.03254691 | 29.73768679 36.10549593 | 26.88451724 34.03254691 | 27.97433104 30.67844495 | 31.50104255 30.67844495 |
| 32.32634117 33.73249404 | 29.47317162 35.80544306 | 26.62000208 33.73249404 | 27.5 29.2 | 31.23652738 30.37839208 |
| 32.09622408 33.405315 | 29.24305453 35.47826402 | 26.38988498 33.405315 | 29.5 30.2 | 31.00641029 30.05121304 |
| 31.91688606 33.04777078 | 29.06371651 35.1207198 | 26.21054696 33.04777078 | - | 30.82707227 29.69366881 |
| 31.81412885 32.66119484 | 28.9609593 34.73414386 | 26.10778976 32.66119484 | - | 30.72431506 29.30709287 |
| Output of the SSD mechanism in the ASD algorithm under the same timestamp | ||||
| ▸No. 1 | No. 2 | No. 3 | ★No. 4 | No. 5 |
| 32.87953077 34.30943511 | 32.87956122 34.30948413 | 32.87949167 34.30943511 | 32.87950546 34.30943315 | 32.87951698 34.30943315 |
| 32.59085634 34.03254691 | 32.59088679 34.03259593 | 32.59081724 34.03254691 | 32.59083104 34.03254495 | 32.59084255 34.03254495 |
| 32.32634117 33.73249404 | 32.32637162 33.73254306 | 32.32630208 33.73249404 | 32.1165 32.5541 | 32.32632738 33.73249208 |
| 32.09622408 33.405315 | 32.09625453 33.40536402 | 32.09618498 33.405315 | ★34.1165 33.5541 | 32.09621029 33.40531304 |
| 31.91688606 33.04777078 | 31.91691651 33.0478198 | 31.91684696 33.04777078 | - | 31.91687227 33.04776881 |
| 31.81412885 32.66119484 | 31.8141593 32.66124386 | 31.81408976 32.66119484 | - | 31.81411506 32.66119287 |
| Enemy deployment strategy and spoofing data record | ||||||
|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | ||
| 25.5 28.2 | 26 30.2 | - | - | - | ||
| 27.5 29.2 | 28 31.2 | - | - | - | ||
| 29.5 30.2 | 30 32.2 | - | - | - | ||
| 31.5 31.2 | 32 33.2 | - | - | - | ||
| Position information received by the GPS receiver of each submachine in the cluster | ||||||
| No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | ||
| 32.87953077 34.30943511 | 30.02636122 36.38238413 | 27.17319167 34.30943511 | 28.26300546 30.95533315 | 31.78971698 30.95533315 | ||
| 32.59085634 34.03254691 | 29.73768679 36.10549593 | 26.88451724 34.03254691 | 27.97433104 30.67844495 | 31.50104255 30.67844495 | ||
| 32.32634117 33.73249404 | 28 31.2 | 28 31.2 | 27.5 29.2 | 31.23652738 30.37839208 | ||
| 32.09622408 33.405315 | 30 32.2 | 30 32.2 | 29.5 30.2 | 31.00641029 30.05121304 | ||
| - | - | - | - | 30.82707227 29.69366881 | ||
| Output of the RSOM mechanism in the ASD algorithm under the same timestamp | ||||||
| ▸virtual central machine | No. 1 | No. 2 | No. 3 | No. 4 | ★ No. 5 | |
| & | −2.083049636 | −2.103285455 | 0.400434363 | 0.400434363 | 0.40238313 | −2.098250379 |
| - | 0.020235819 | 2.483483999 | 2.483483999 | 2.485432766 | 0.015470743 | |
| Enemydeployment strategy and spoofing data record | ||||||
|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | ||
| 26 31.3 | 24.5 30.6 | 25.5 28.4 | - | - | ||
| 28 31.3 | 26.5 30.6 | 27.5 29.4 | - | - | ||
| 30 32.3 | 28.5 31.6 | 29.5 30.4 | - | - | ||
| 32 33.3 | 30.5 32.6 | 31.5 31.4 | - | - | ||
| Position information received by the GPS receiver of each submachine in the cluster | ||||||
| No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | ||
| 31.91688606 33.04777078 | 29.06371651 35.1207198 | 26.21054696 33.04777078 | 27.30036075 29.69366881 | 30.82707227 29.69366881 | ||
| 31.81412885 32.66119484 | 28.9609593 34.73414386 | 26.10778976 32.66119484 | 27.19760355 29.30709287 | 30.72431506 29.30709287 | ||
| 31.82313175 32.26129617 | 28 31.3 | 26.5 30.6 | 27.5 29.4 | 30.73331796 28.9071942 | ||
| 31.97080846 31.88955487 | 30 32.3 | 28.5 31.6 | 29.5 30.4 | 30.88099467 28.53545291 | ||
| 32.24110927 31.59470327 | - | - | - | - | ||
| 32.58404982 31.38881062 | - | - | - | - | ||
| Output of the RSOM mechanism in the ASD algorithm under the same timestamp | ||||||
| ▸virtual central machine | ★No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | |
| & | −1.128328325 | −1.131434769 | 0.408047301 | 0.413437933 | 0.409874591 | −1.135919561 |
| - | 0.003103444 | 1.536375626 | 1.541766258 | 1.538202916 | 0.007591236 | |
| Enemy deployment strategy and spoofing data record | ||||||
|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | ||
| 25.5 28.2 | 26.5 30.3 | 24.5 28.5 | 25 29.6 | - | ||
| 27.5 29.2 | 28.5 31.3 | 26.5 29.5 | 27 30.6 | - | ||
| 29.5 30.2 | 30.5 32.3 | 28.5 30.5 | 29 31.6 | - | ||
| 31.5 31.2 | 32.5 33.3 | 30.5 31.5 | 31 32.6 | - | ||
| Position information received by the GPS receiver of each submachine in the cluster | ||||||
| No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | ||
| 32.32634117 33.73249404 | 29.47317162 35.80544306 | 26.62000208 33.73249404 | 27.70981587 30.37839208 | 31.23652738 30.37839208 | ||
| 32.09622408 33.405315 | 29.24305453 35.47826402 | 26.38988498 33.405315 | 27.47969878 30.05121304 | 31.00641029 30.05121304 | ||
| 31.91688606 33.04777078 | 27 30.6 | 28.5 31.3 | 26.5 29.5 | 27.5 29.2 | ||
| 31.81412885 32.66119484 | 29 31.6 | 30.5 32.3 | 28.5 30.5 | 29.5 30.2 | ||
| 31.82313175 32.26129617 | - | - | - | - | ||
| Output of the RSOM mechanism in the ASD algorithm under the same timestamp | ||||||
| ▸virtual central machine | ★No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | |
| & | −1.868540485 | −1.872339647 | 0.411671473 | 0.406189617 | 0.413437933 | 0.409874591 |
| - | 0.006799162 | 2.280211958 | 2.274730102 | 2.281978418 | 2.278415.76 | |
| Enemy deployment strategy and spoofing data record | ||||||
|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | ||
| 24.5 28.5 | 25 29.6 | 26.5 30.3 | 25.5 28.2 | 31.5 32.2 | ||
| 26.5 29.5 | 27 30.6 | 28.5 31.3 | 27.5 29.2 | 33.5 33.2 | ||
| 28.5 30.5 | 29 31.6 | 30.5 32.3 | 29.5 30.2 | 35.5 34.2 | ||
| 30.5 31.5 | 31 32.6 | 32.5 33.3 | 31.5 31.2 | 37.5 35.2 | ||
| Position information received by the GPS receiver of each submachine in the cluster | ||||||
| No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | ||
| 35.57992834 36.00852281 | 32.7267588 38.08147183 | 29.87358925 36.00852281 | 30.96340304 32.65442085 | 34.49011455 32.65442085 | ||
| 35.22171153 35.83053205 | 32.3685419 37.90348106 | 29.51537243 35.83053205 | 30.60518622 32.47643008 | 34.13189774 32.47643008 | ||
| 26.5 29.5 | 27 30.6 | 28.5 31.3 | 27.5 29.2 | 33.5 33.2 | ||
| 8.5 30.5 | 29 31.6 | 30.5 32.3 | 29.5 30.2 | 35.5 34.2 | ||
| - | 31 32.6 | - | - | - | ||
| Output of the RSOM mechanism in the ASD algorithm under the same timestamp | ||||||
| ▸virtual central machine | No. 1 | ★ No. 2 | No. 3 | No. 4 | No. 5 | |
| & | −2.24089981 | 0.41928125 | 0.41256874 | 0.418652482 | 0.4198514278 | 0.500265478 |
| - | 2.66018106 | 2.65346855 | 2.659552292 | 2.6607512378 | 2.741165288 | |
| Methods | Detection Accuracy | Detection Time | Method Characteristics |
|---|---|---|---|
| Liang, Chen (2019) [28] | 98.6% | 8 s | Requires prior knowledge of a given task, and other members within the communication range must be greater than 3 |
| AR Eld. etc. (2020) [27] | Undefined and not analyzed | Undefined and not analyzed | There is only one deception source, only one aircraft is deceived at a time, and one aircraft is absolutely safe; the method is applicable to clusters with a scale of 5 or more |
| Pavlo Mykytyn (2023) [29] | Undefined and not analyzed | Undefined and not analyzed | One distance ranging technology; the execution of this method strongly relies on security thresholds |
| method proposed | 100% | 0.4 s | 1. The cluster size is greater than or equal to 3 and is suitable for random flight missions; 2. There can be multiple deception sources in the flight environment that launch indiscriminate attacks against the cluster; 3. There are no constraints required for the execution of deception detection in the method, and during the task, after implementation of detection, it follows the safe machine concept, but not a strong constraint. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, L.; Zhang , L.; Yang, L.; Yang, W. A GPS-Adaptive Spoofing Detection Method for the Small UAV Cluster. Drones 2023, 7, 461. https://doi.org/10.3390/drones7070461
Meng L, Zhang L, Yang L, Yang W. A GPS-Adaptive Spoofing Detection Method for the Small UAV Cluster. Drones. 2023; 7(7):461. https://doi.org/10.3390/drones7070461
Chicago/Turabian StyleMeng, Lianxiao, Long Zhang , Lin Yang, and Wu Yang. 2023. "A GPS-Adaptive Spoofing Detection Method for the Small UAV Cluster" Drones 7, no. 7: 461. https://doi.org/10.3390/drones7070461