
Decentralized Multi-UAV Cooperative Exploration Using Dynamic Centroid-Based Area Partition


Abstract
:1. Introduction
- We propose a dynamic centroid-based area partition method that takes into account both the positions and current tasks of each UAV during the exploration process. This approach ensures that the UAVs that detect fewer tasks are allocated more mission area in the next step, maximizing the efficiency of the exploration process.
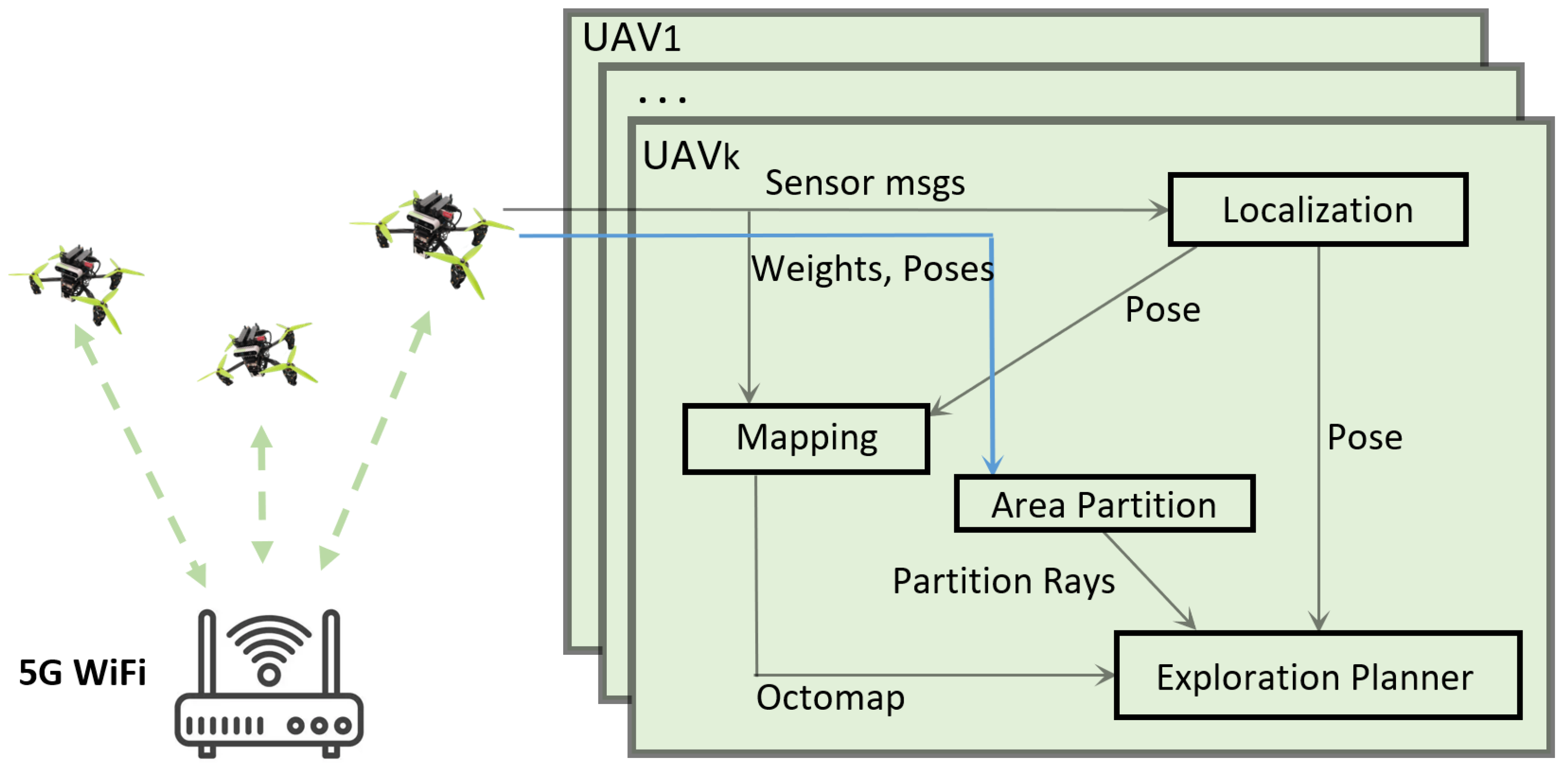
- The NBV exploration planner has been improved by making modifications so that it only samples within a dynamically partitioned area. Additionally, we have innovatively formulated a weight to describe task quantity for the purpose of more effective partitioning.
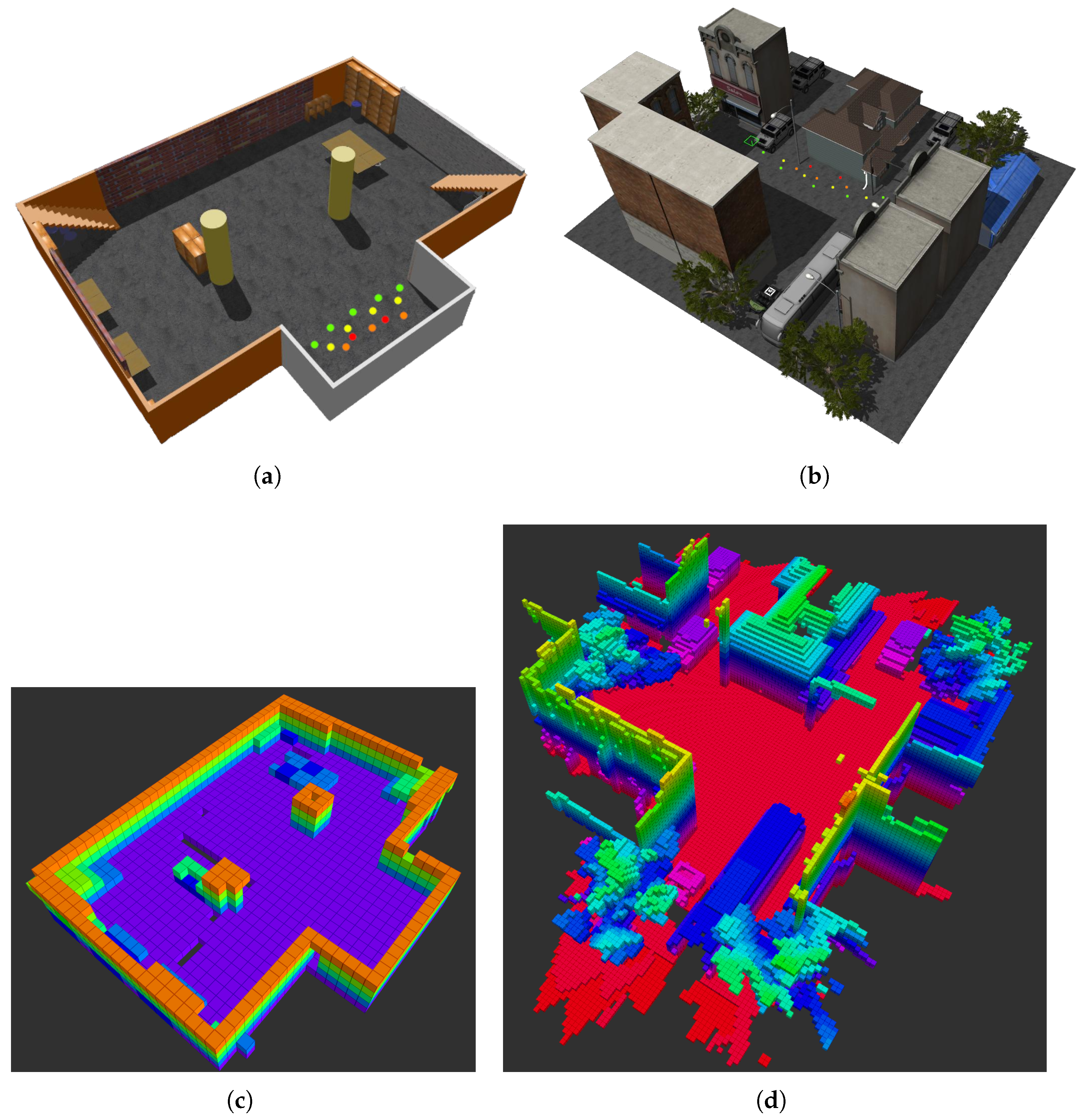
- The performance of the proposed method is validated by comparing with three classic multi-UAV cooperative exploration methods in both indoor and outdoor simulation environments. The practical experiment is also conducted to verify its feasibility.
2. Related Work
2.1. Multi-UAV Coordination for Exploration
2.2. Multi-UAV Mapping for Exploration
2.3. Exploration in Unknown Environments
3. Problem Statement
4. Method
4.1. Dynamic Centroid-Based Area Partition
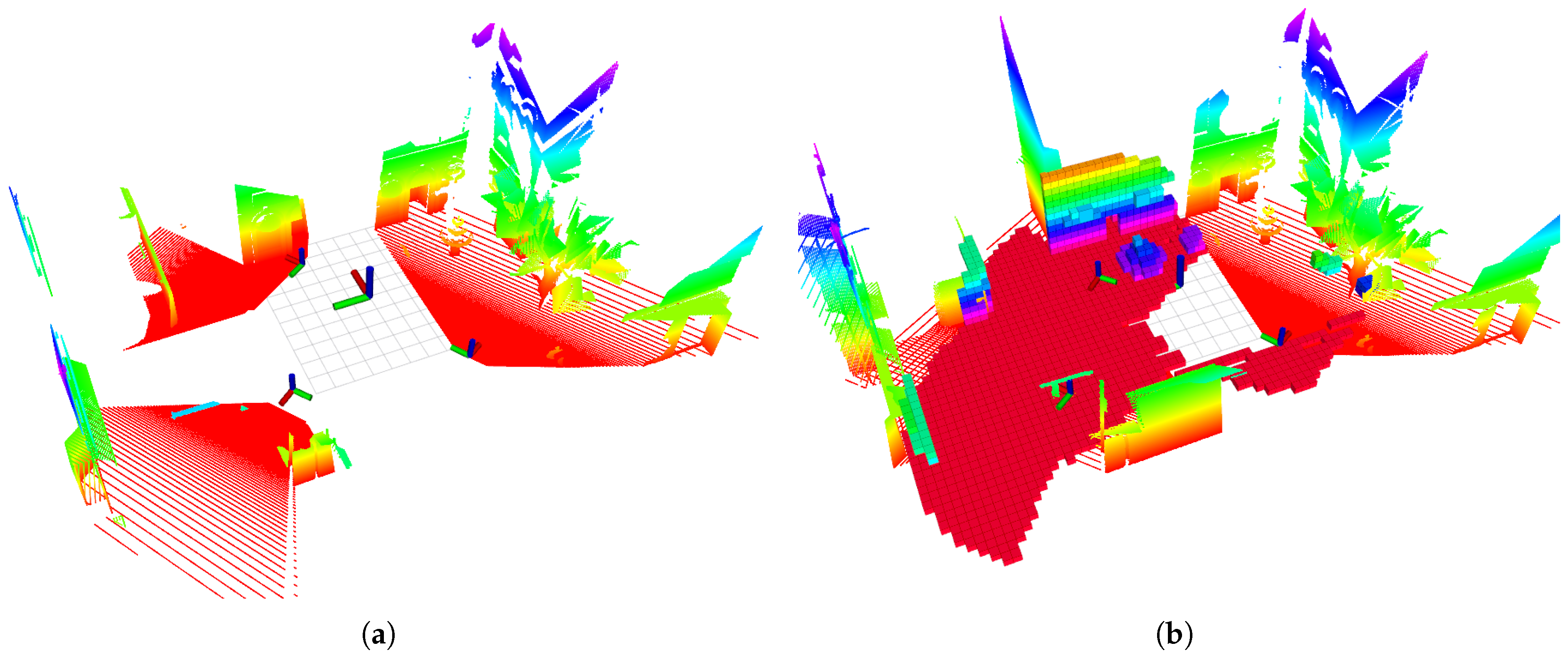
4.2. Distributed Ray-Cast Mapping
4.3. Decentralized Cooperative Exploration Planner
| Algorithm 1 Decentralized Cooperative Exploration Planner |
|
5. Evaluation in Simulation
5.1. Indoor Scenario
5.2. Large Outdoor Scenario
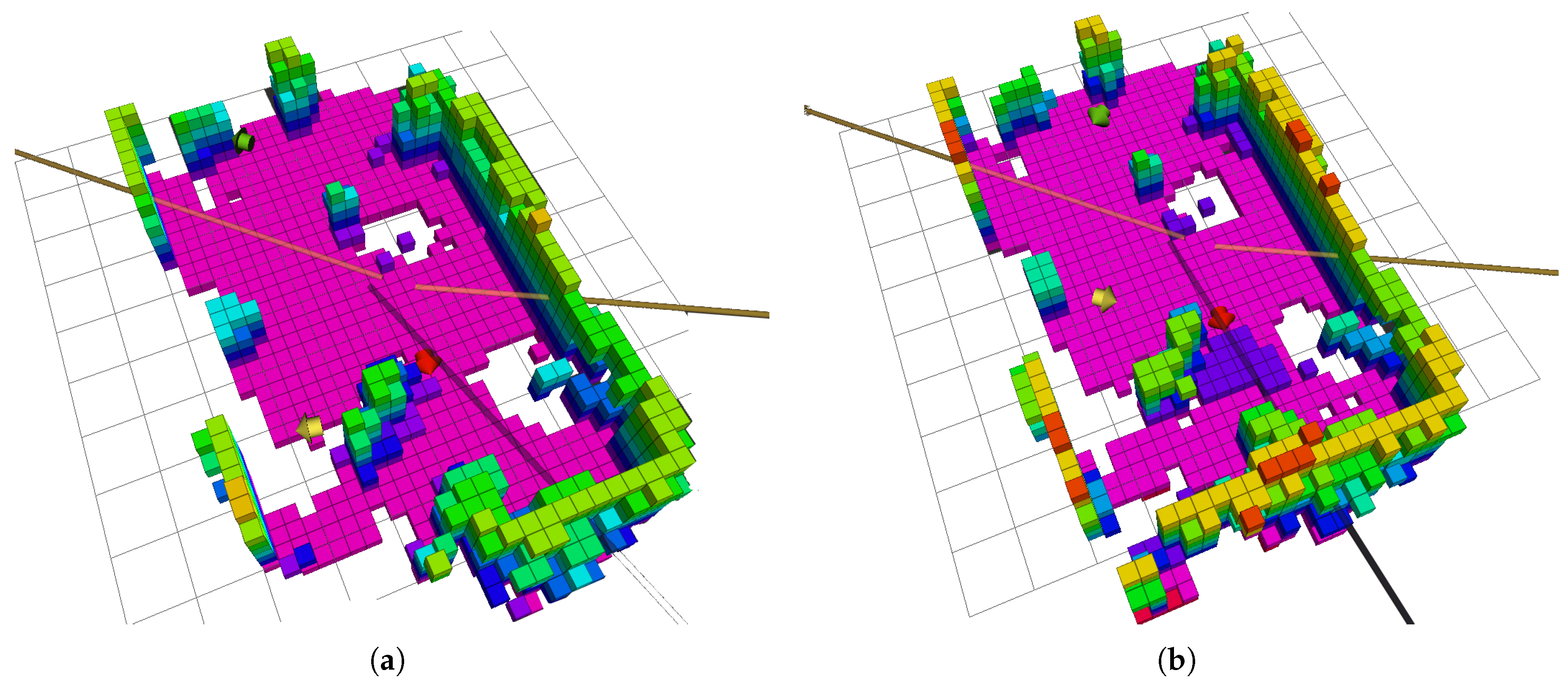
6. Evaluation in Practical Experiments
7. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cieslewski, T.; Kaufmann, E.; Scaramuzza, D. Rapid exploration with multi-rotors: A frontier selection method for high speed flight. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2135–2142. [Google Scholar] [CrossRef]
- Wang, C.; Chi, W.; Sun, Y.; Meng, M.Q.H. Autonomous Robotic Exploration by Incremental Road Map Construction. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1720–1731. [Google Scholar] [CrossRef]
- Xu, Z.; Deng, D.; Shimada, K. Autonomous UAV Exploration of Dynamic Environments Via Incremental Sampling and Probabilistic Roadmap. IEEE Robot. Autom. Lett. 2021, 6, 2729–2736. [Google Scholar] [CrossRef]
- Jung, S. Bridge Inspection Using Unmanned Aerial Vehicle Based on HG-SLAM: Hierarchical Graph-Based SLAM. Remote Sens. 2020, 12, 3022. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Y.X.; Chen, Y.Q.; Ju, S. Multi-UAVs collaborative tracking of moving target with maximized visibility in urban environment. J. Frankl. Inst. 2022, 359, 5512–5532. [Google Scholar] [CrossRef]
- Pan, T.; Gui, J.; Dong, H.; Deng, B.; Zhao, B. Vision-Based Moving-Target Geolocation Using Dual Unmanned Aerial Vehicles. Remote Sens. 2023, 15, 389. [Google Scholar] [CrossRef]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Voronoi-Based Multi-Robot Autonomous Exploration in Unknown Environments via Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 14413–14423. [Google Scholar] [CrossRef]
- Simmons, R.; Apfelbaum, D.; Burgard, W.; Fox, D.; Moors, M.; Thrun, S.; Younes, H. Coordination for Multi-Robot Exploration and Mapping; AAAI Press: Palo Alto, CA, USA, 2020; pp. 852–858. [Google Scholar]
- Yu, J.; Tong, J.; Xu, Y.; Xu, Z.; Dong, H.; Yang, T.; Wang, Y. SMMR-Explore: SubMap-based Multi-Robot Exploration System with Multi-robot Multi-target Potential Field Exploration Method. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 8779–8785. [Google Scholar] [CrossRef]
- Masaba, K.; Li, A.Q. GVGExp: Communication-Constrained Multi-Robot Exploration System based on Generalized Voronoi Graphs. In Proceedings of the 2021 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), Cambridge, UK, 4–5 November 2021; pp. 146–154. [Google Scholar] [CrossRef]
- Mannucci, A.; Nardi, S.; Pallottino, L. Autonomous 3D Exploration of Large Areas: A Cooperative Frontier-Based Approach. In Proceedings of the Modelling and Simulation for Autonomous Systems, Rome, Italy, 24–26 October 2017; Mazal, J., Ed.; Springer International Publishing: Cham, Switzerland, 2018; pp. 18–39. [Google Scholar] [CrossRef]
- Bircher, A.; Kamel, M.; Alexis, K.; Oleynikova, H.; Siegwart, R. Receding Horizon “Next-Best-View” Planner for 3D Exploration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1462–1468. [Google Scholar] [CrossRef]
- Lindqvist, B.; Agha-Mohammadi, A.A.; Nikolakopoulos, G. Exploration-RRT: A multi-objective Path Planning and Exploration Framework for Unknown and Unstructured Environments. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3429–3435. [Google Scholar] [CrossRef]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Yu, T.; Deng, B.; Gui, J.; Zhu, X.; Yao, W. Efficient Informative Path Planning via Normalized Utility in Unknown Environments Exploration. Sensors 2022, 22, 8429. [Google Scholar] [CrossRef] [PubMed]
- Ju, S.; Wang, J.; Dou, L. MPC-Based Cooperative Enclosing for Nonholonomic Mobile Agents Under Input Constraint and Unknown Disturbance. IEEE Trans. Cybern. 2023, 53, 845–858. [Google Scholar] [CrossRef]
- Fox, D.; Jonathan, K.O.; Konolige, K.; Limketkai, B.; Schulz, D.; Stewart, B. Distributed Multirobot Exploration and Mapping. Proc. IEEE 2006, 94, 1325–1339. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, Y.; Zhou, D. Measuring uncertainty in the negation evidence for multi-source information fusion. Entropy 2022, 24, 1596. [Google Scholar] [CrossRef] [PubMed]
- Hardouin, G.; Moras, J.; Morbidi, F.; Marzat, J.; Mouaddib, E.M. Next-Best-View planning for surface reconstruction of large-scale 3D environments with multiple UAVs. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 1567–1574. [Google Scholar] [CrossRef]
- Oleynikova, H.; Taylor, Z.; Fehr, M.; Siegwart, R.; Nieto, J. Voxblox: Incremental 3D Euclidean Signed Distance Fields for on-board MAV planning. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1366–1373. [Google Scholar] [CrossRef]
- Li, H.; Tsukada, M.; Nashashibi, F.; Parent, M. Multivehicle Cooperative Local Mapping: A Methodology Based on Occupancy Grid Map Merging. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2089–2100. [Google Scholar] [CrossRef]
- Corah, M.; O’Meadhra, C.; Goel, K.; Michael, N. Communication-Efficient Planning and Mapping for Multi-Robot Exploration in Large Environments. IEEE Robot. Autom. Lett. 2019, 4, 1715–1721. [Google Scholar] [CrossRef]
- Schmid, L.; Reijgwart, V.; Ott, L.; Nieto, J.; Siegwart, R.; Cadena, C. A Unified Approach for Autonomous Volumetric Exploration of Large Scale Environments Under Severe Odometry Drift. IEEE Robot. Autom. Lett. 2021, 6, 4504–4511. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, Y.; Chen, X.; Shen, S. FUEL: Fast UAV Exploration Using Incremental Frontier Structure and Hierarchical Planning. IEEE Robot. Autom. Lett. 2021, 6, 779–786. [Google Scholar] [CrossRef]
- Lee, E.M.; Choi, J.; Lim, H.; Myung, H. REAL: Rapid Exploration with Active Loop-Closing toward Large-Scale 3D Mapping using UAVs. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4194–4198. [Google Scholar] [CrossRef]
- Zhu, H.; Cao, C.; Xia, Y.; Scherer, S.; Zhang, J.; Wang, W. DSVP: Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 7623–7630. [Google Scholar] [CrossRef]
- Schmid, L.; Pantic, M.; Khanna, R.; Ott, L.; Siegwart, R.; Nieto, J. An Efficient Sampling-Based Method for Online Informative Path Planning in Unknown Environments. IEEE Robot. Autom. Lett. 2020, 5, 1500–1507. [Google Scholar] [CrossRef]
- Charrow, B.; Kahn, G.; Patil, S.; Liu, S.; Goldberg, K.; Abbeel, P.; Michael, N.; Kumar, V. Information-Theoretic Planning with Trajectory Optimization for Dense 3D Mapping. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015; Volume 11, pp. 3–12. [Google Scholar] [CrossRef]
- Li, S.; Tian, B.; Zhu, X.; Gui, J.; Yao, W.; Li, G. InTEn-LOAM: Intensity and Temporal Enhanced LiDAR Odometry and Mapping. Remote Sens. 2022, 15, 242. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| MaxTreeLength | |||
| 10 | 100 | ||
| 30 | Mounting pitch |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gui, J.; Yu, T.; Deng, B.; Zhu, X.; Yao, W. Decentralized Multi-UAV Cooperative Exploration Using Dynamic Centroid-Based Area Partition. Drones 2023, 7, 337. https://doi.org/10.3390/drones7060337
Gui J, Yu T, Deng B, Zhu X, Yao W. Decentralized Multi-UAV Cooperative Exploration Using Dynamic Centroid-Based Area Partition. Drones. 2023; 7(6):337. https://doi.org/10.3390/drones7060337
Chicago/Turabian StyleGui, Jianjun, Tianyou Yu, Baosong Deng, Xiaozhou Zhu, and Wen Yao. 2023. "Decentralized Multi-UAV Cooperative Exploration Using Dynamic Centroid-Based Area Partition" Drones 7, no. 6: 337. https://doi.org/10.3390/drones7060337