
SunMap: Towards Unattended Maintenance of Photovoltaic Plants Using Drone Photogrammetry
 , and
, and 
Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
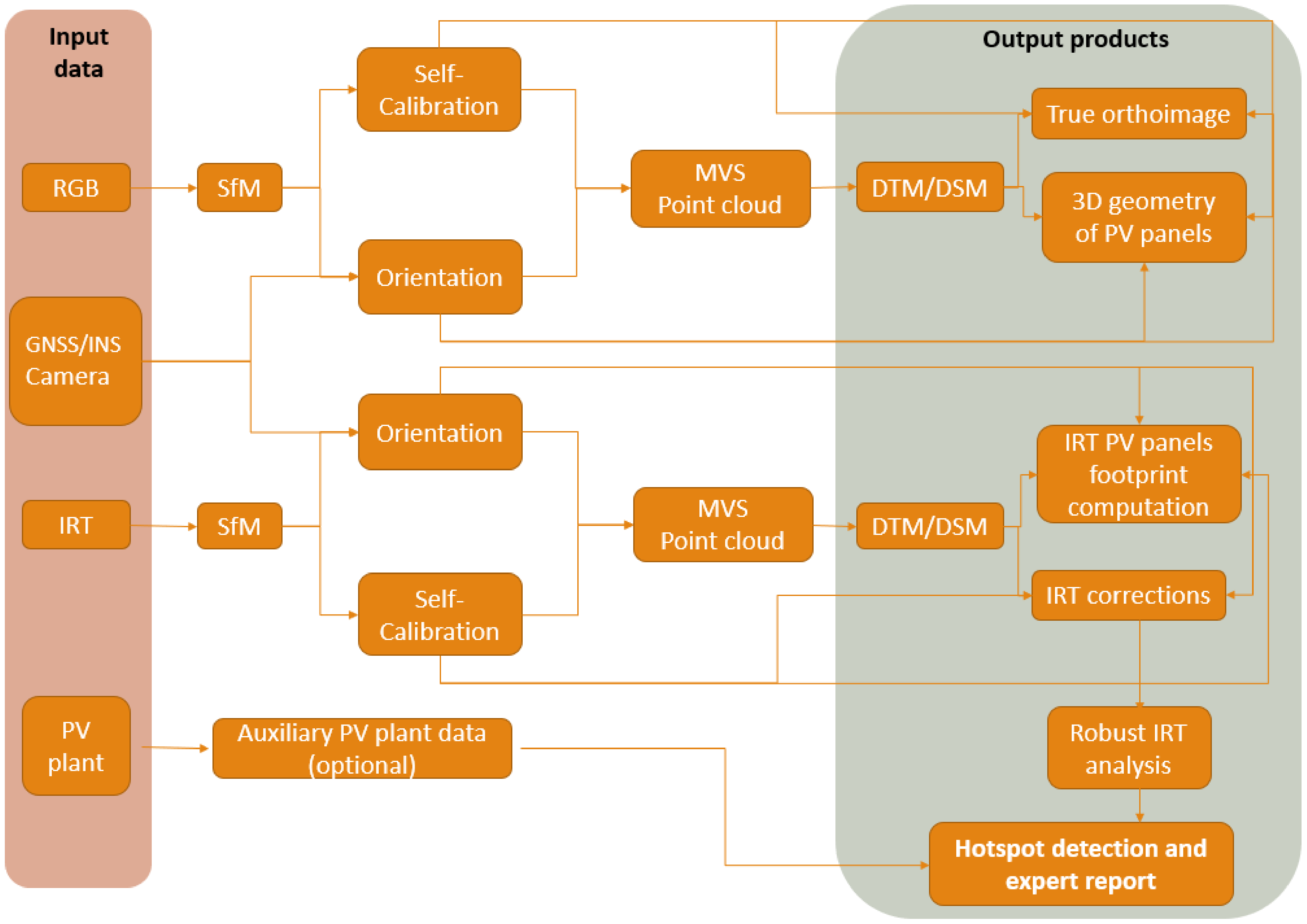
2. Methodology
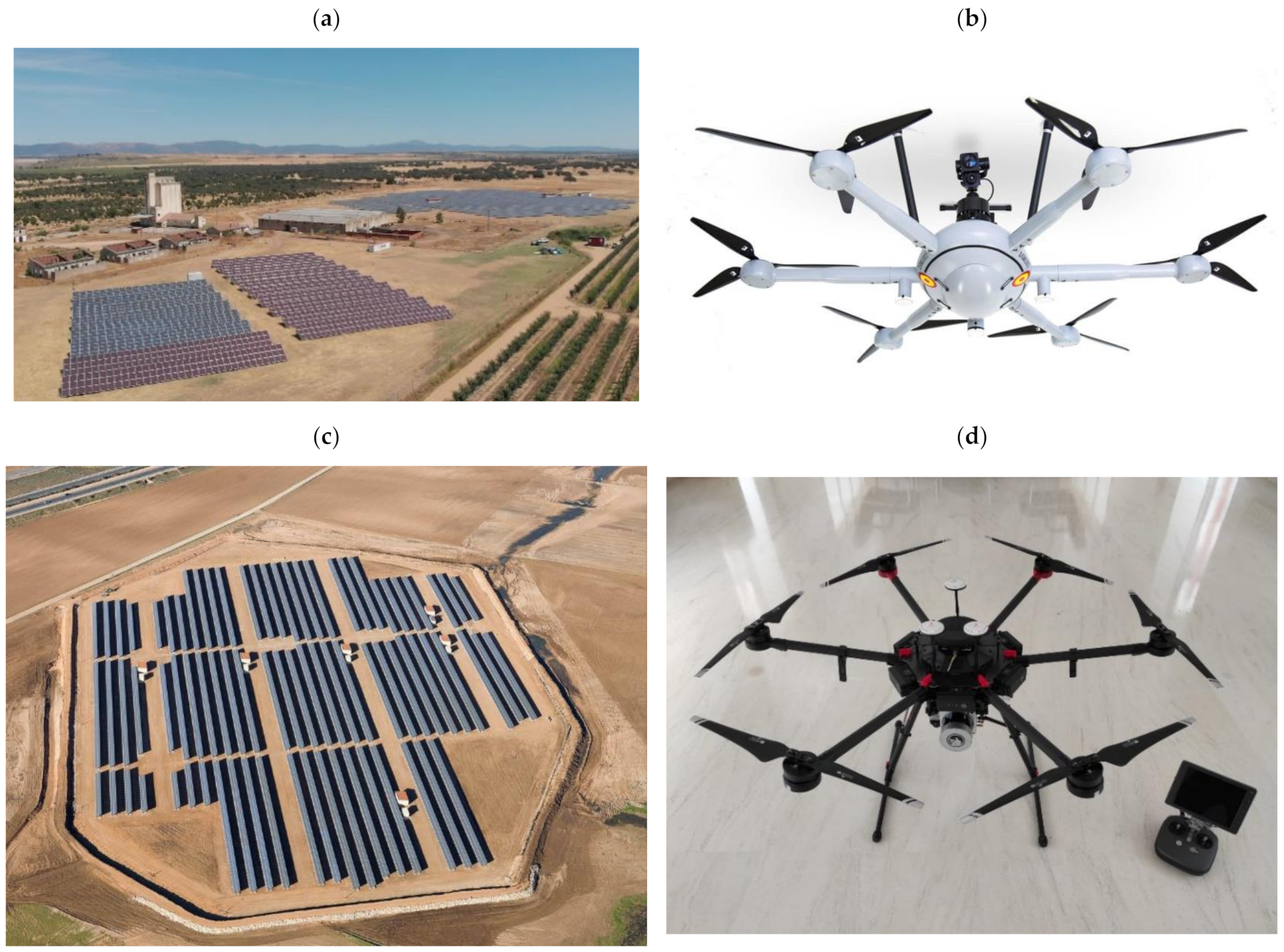
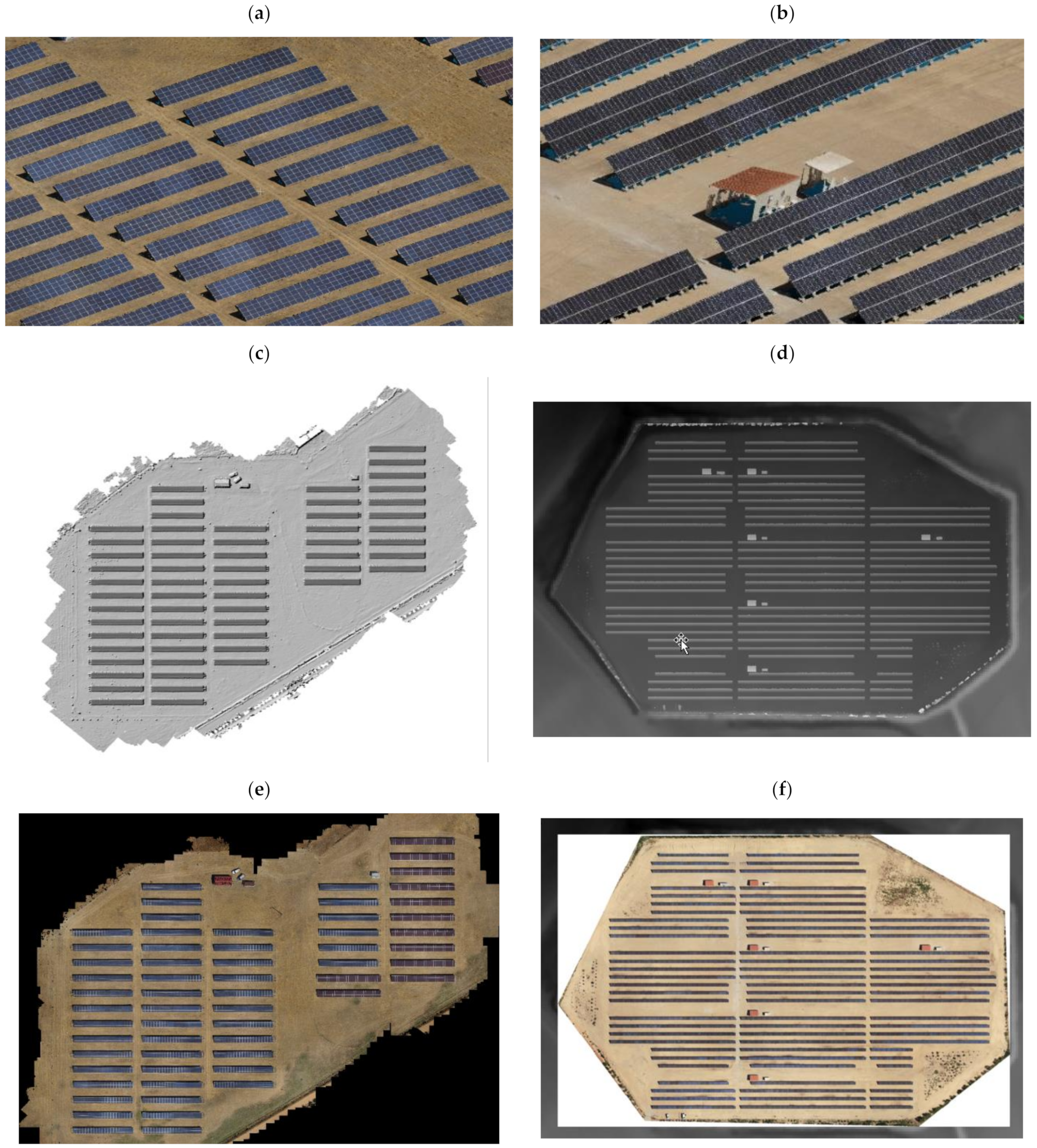
2.1. Photogrammetric Processing of Visible and Thermographic Images
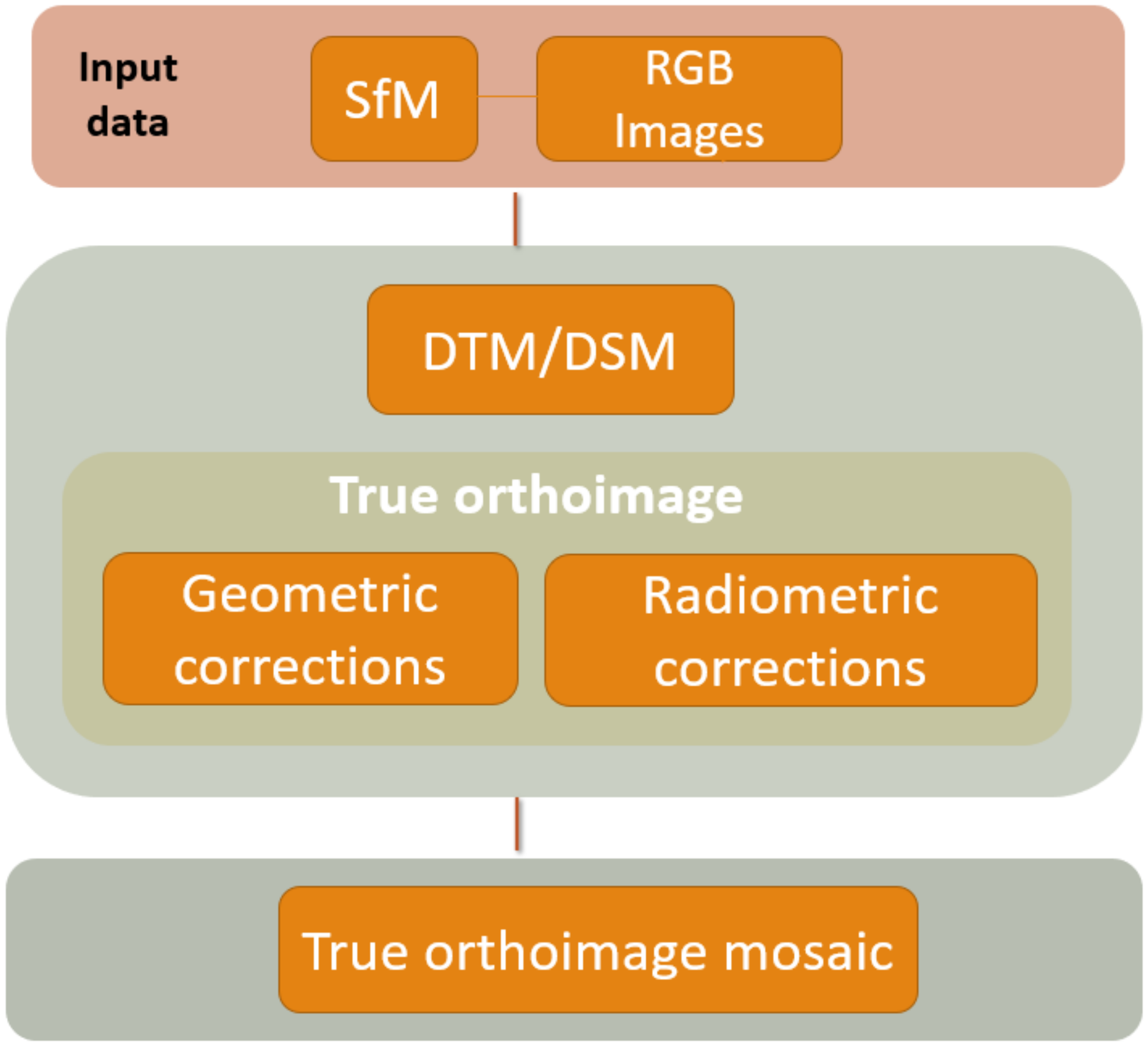
2.2. Cartographic Products Generation
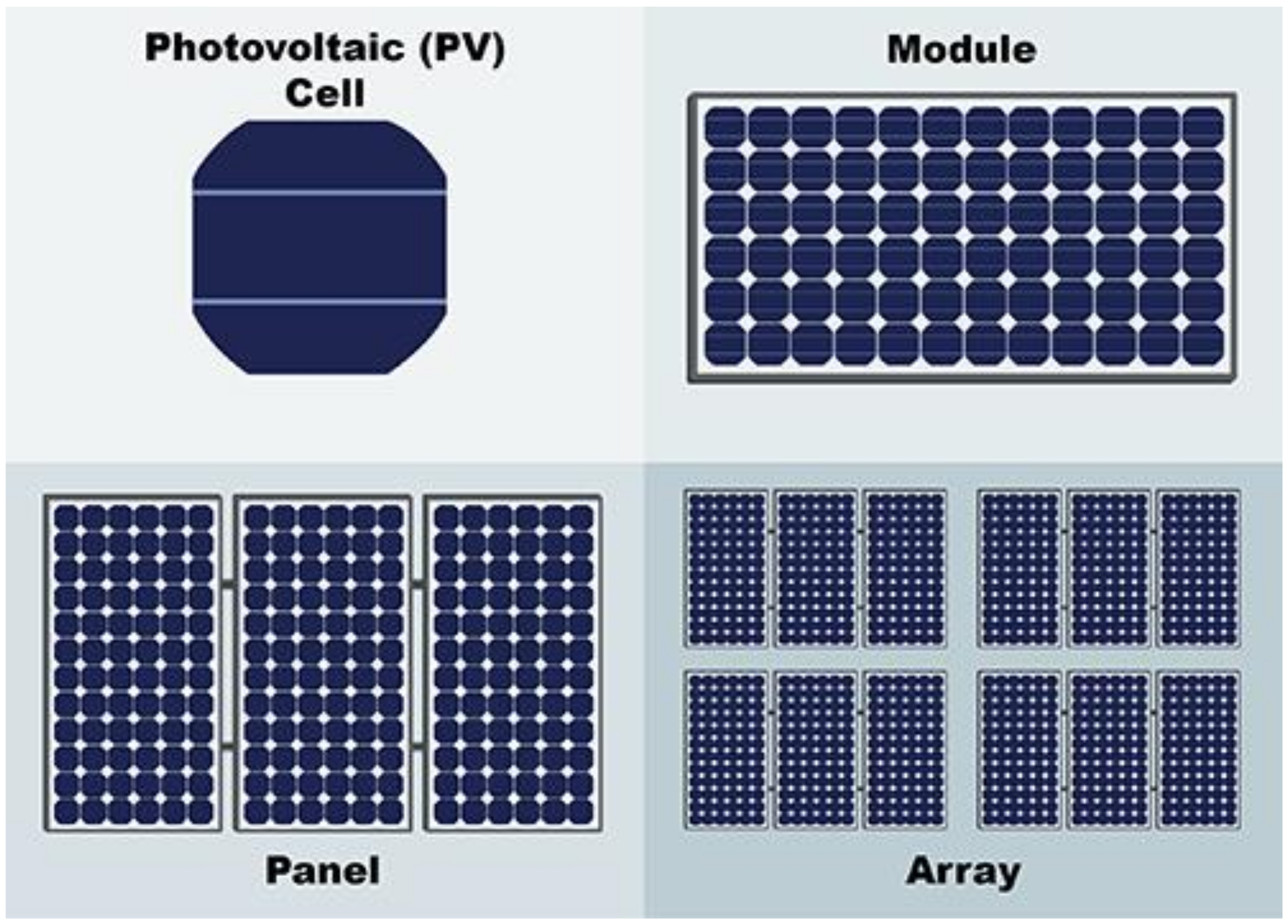
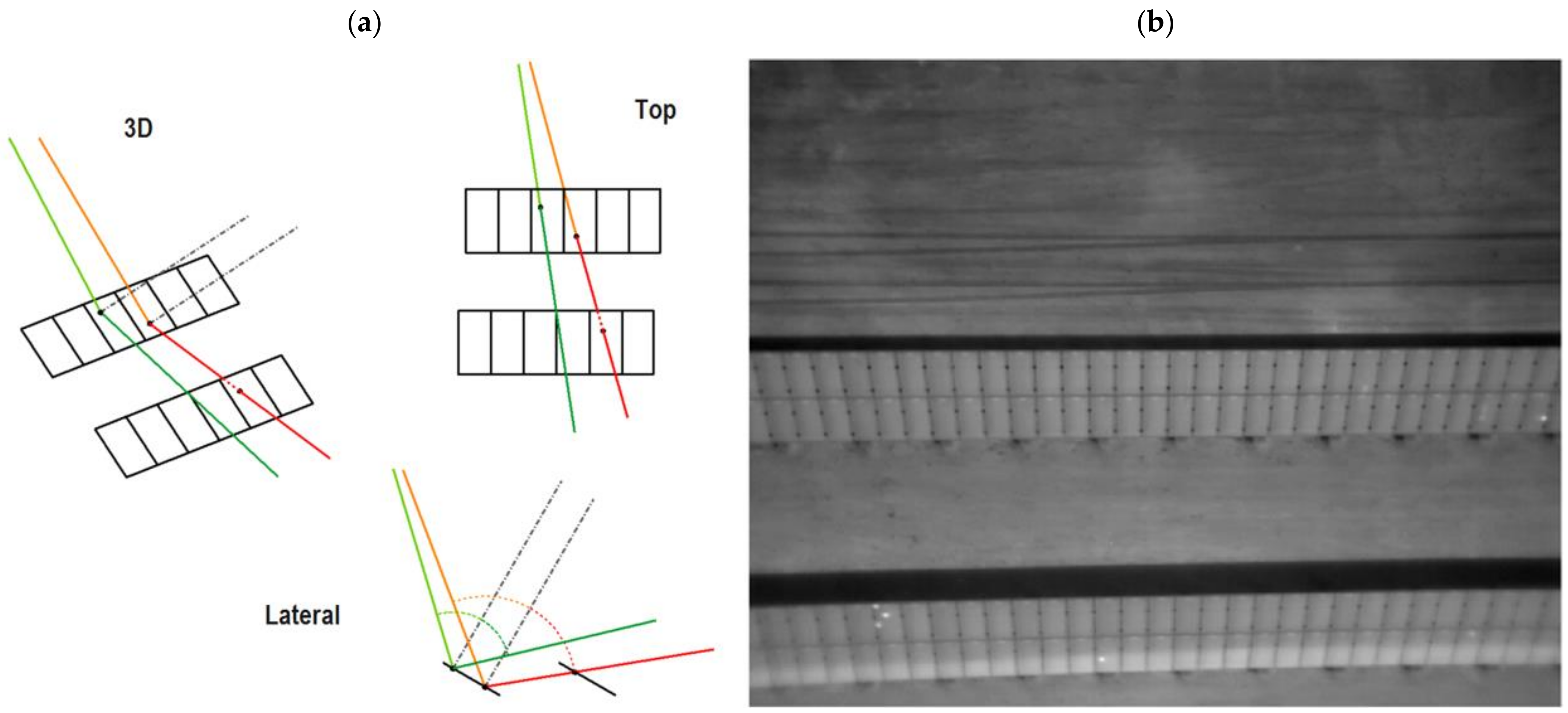
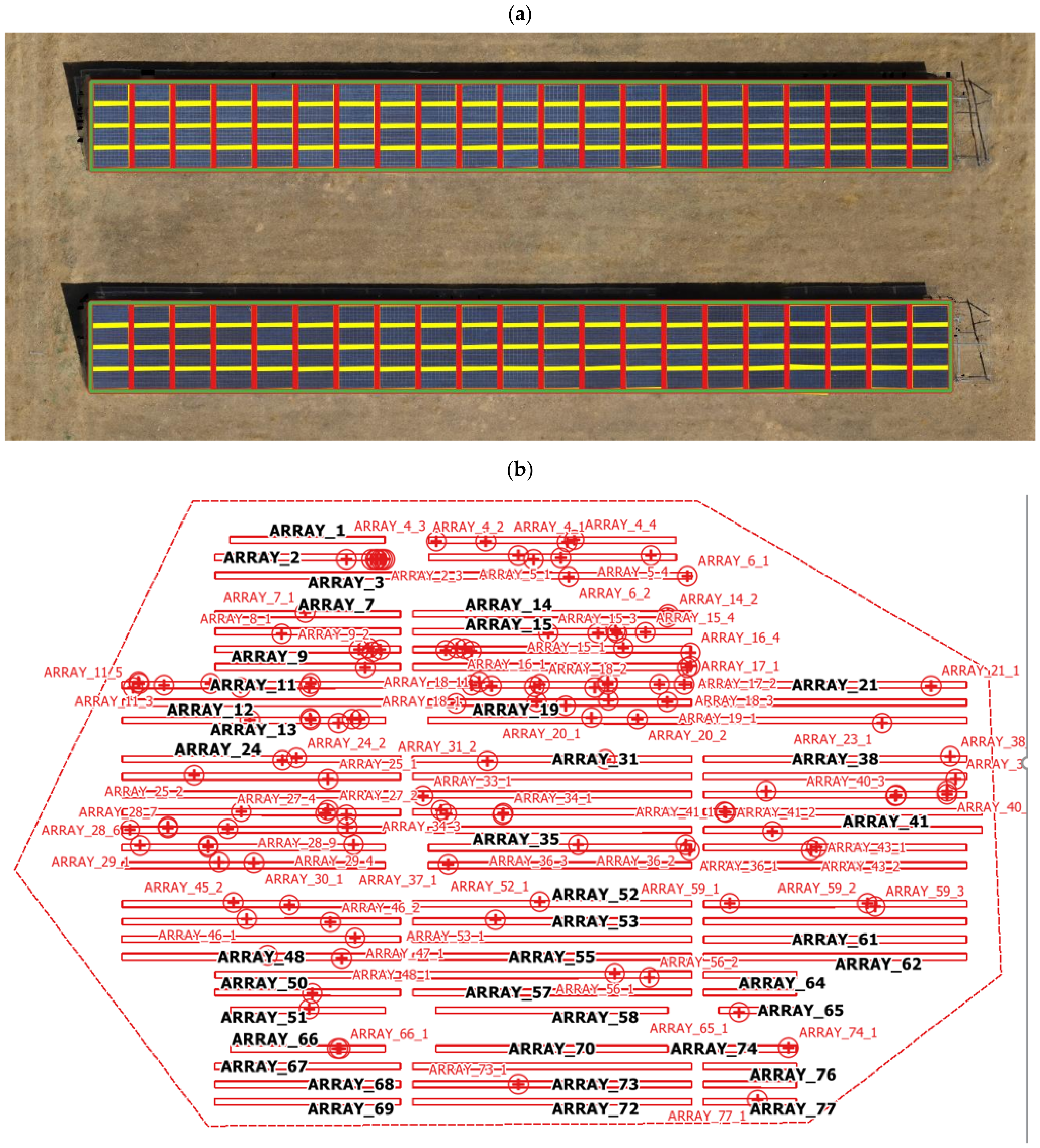
2.3. Extraction and Detection of the 3D Geometry of PV Panels
2.4. Correction of Thermographic Images
2.5. Statistical Analysis of Temperatures
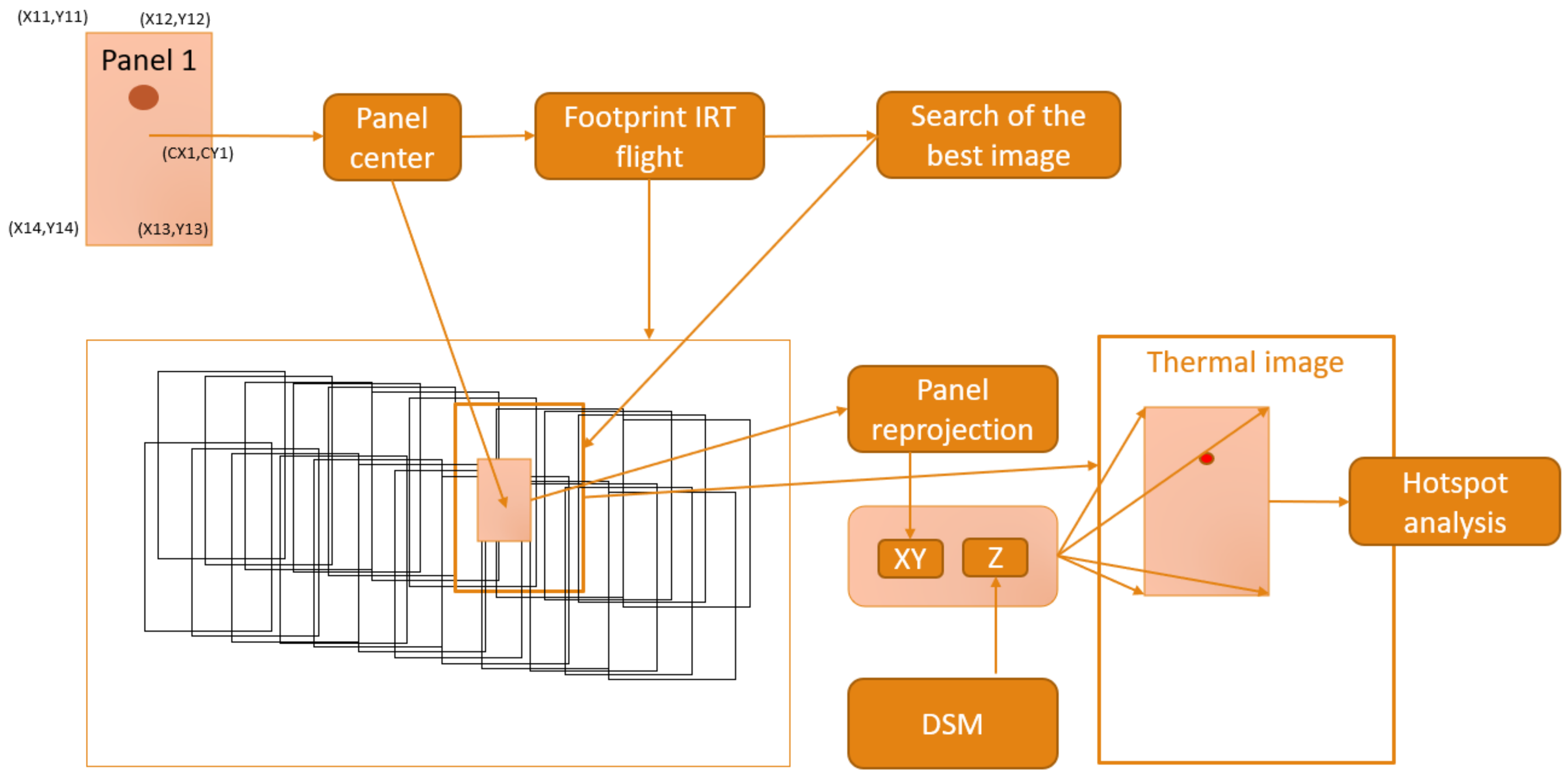
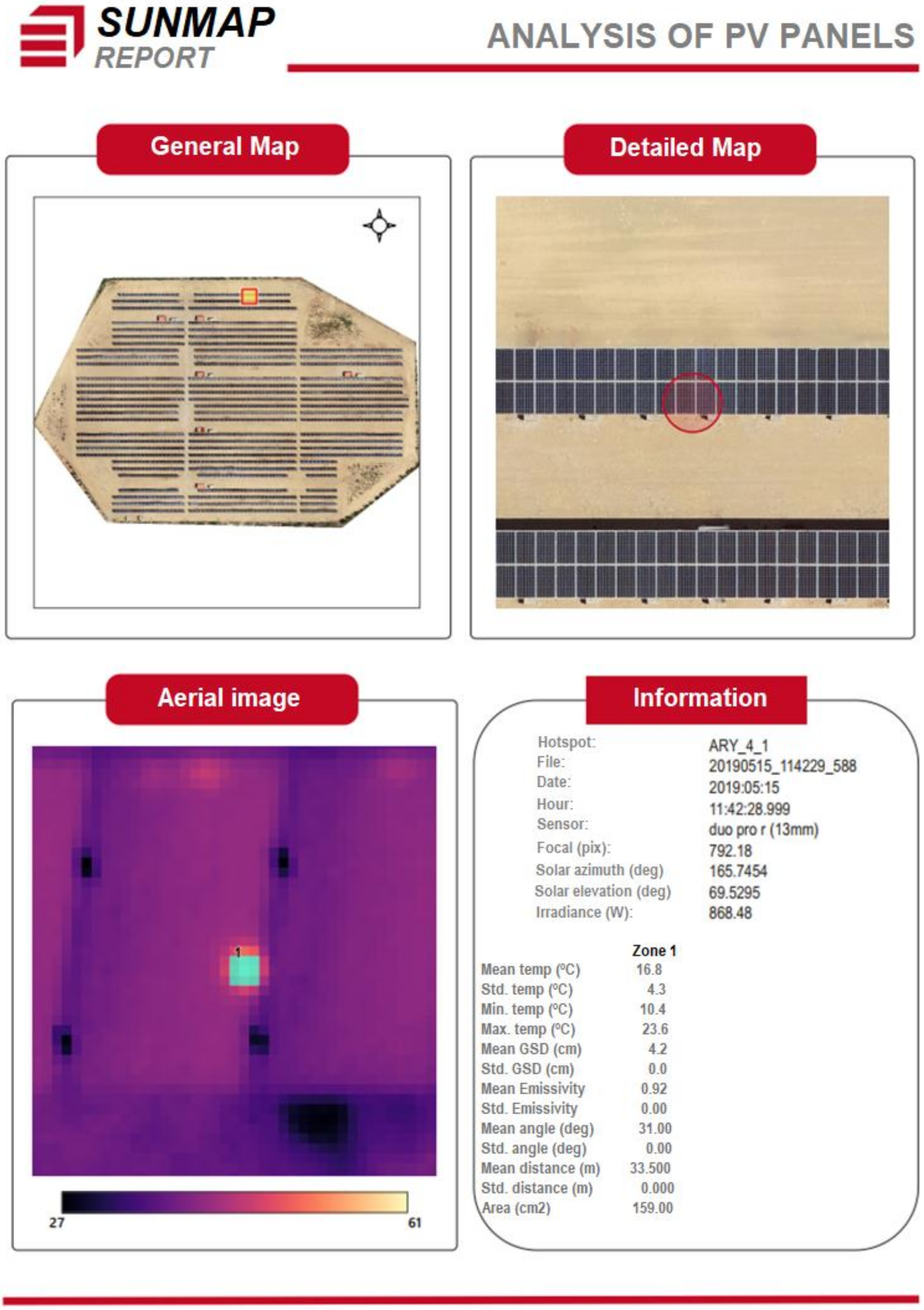
2.6. Hot Spot Detection and Expert Report Generation
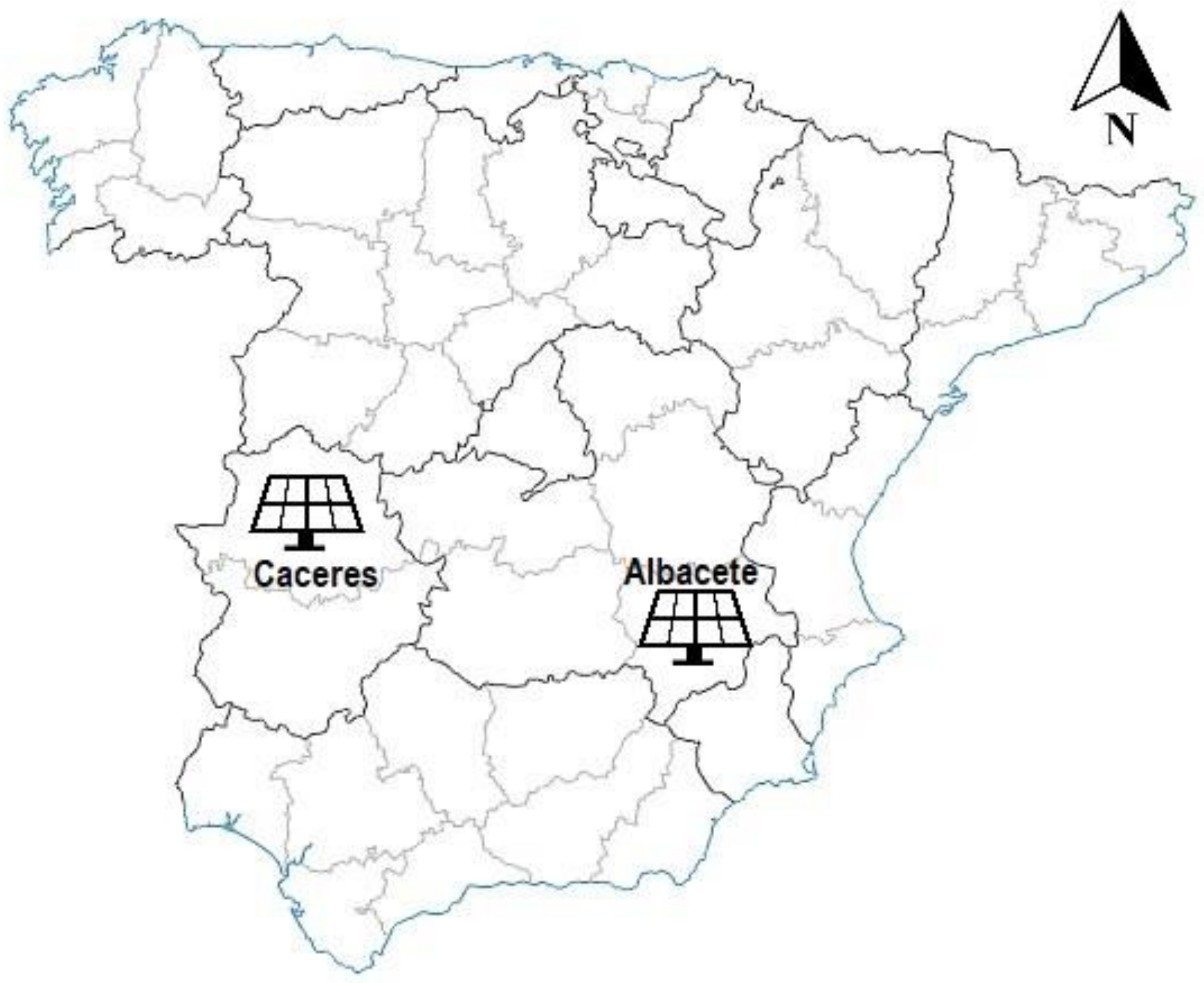
3. Case Studies
4. Results
4.1. Photogrammetric Processing of Visible and Thermographic Images
4.2. Generation of Cartographic Products
4.3. Extraction and Detection of PV Panels
4.4. Hot Spot Detection and Report Generation
5. Discussion
6. Conclusions
- A rigorous photogrammetric approach able to deal with RGB and IRT images is provided.
- 3D dense models and true orthoimages are generated automatically with high quality and metric properties.
- Automatic extraction and database coding of the structural information regarding the PV panels is integrated into the software, guaranteeing subpixel precision.
- Important thermographic corrections and robust statistical analysis are encoded within the software, providing rigorous thermographic treatment of images.
- The hot spot detection is reliable and accurate, and is reinforced with an expert report which integrates all the information required for maintenance operations.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Oskouei, M.Z.; Seker, A.A.; Tunçel, S.; Demirba¸s, E.; Gözel, T.; Hocaoğlu, M.H.; Abapour, M.; Mohammadi-Ivatloo, B. A Critical Review on the Impacts of Energy Storage Systems and Demand-Side Management Strategies in the Economic Operation of Renewable-Based Distribution Network. Sustainability 2022, 14, 2110. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; Rodriguez-Gonzalvez, P. Drones—An Open Access Journal. Drones 2017, 1, 1. [Google Scholar] [CrossRef]
- Montes, G.A.; Goertzel, B. Distributed, decentralized, and democratized artificial intelligence. Technol. Forecast. Soc. Chang. 2019, 141, 354–358. [Google Scholar] [CrossRef]
- González-Aguilera, D.; López-Fernández, L.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Guerrero, D.; Remondino, F.; Menna, F.; Nocerino, E.; Toschi, I.; Ballabeni, A.; et al. GRAPHOS—Open-Source Software for Photogrammetric Applications. Photogramm. Rec. 2018, 33, 11–29. [Google Scholar] [CrossRef]
- Fernández-Hernandez, J.; González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Mancera-Taboada, J. Image-based modelling from unmanned aerial vehicle (UAV) photogrammetry: An effective, low-cost tool for archaeological applications. Archaeometry 2015, 57, 128–145. [Google Scholar] [CrossRef]
- IEC TS 62446-3, Thecnical Specification: Photovoltaic (PV) Systems—Requirements for Testing, Documentation and Maintenance—Part 3: Photovoltaic Modules and Plants—Outdoor Infrared Thermography, Según la Edition 1.0 2017-06. Available online: https://webstore.iec.ch/publication/28628 (accessed on 30 December 2022).
- Grimaccia, F.; Leva, S.; Dolara, A.; Achaea, M. Survey on PV Modules’ Common Faults after an O&M Flight Extensive Campaign over Different Plants in Italy. IEEE J. Photovolt. 2017, 7, 810–816. [Google Scholar]
- Salient, S.; Chouder, A.; Guerriero, P.; Pavan, A.M.; Mellit, A.; Moeini, R.; Tricoli, P. Monitoring, diagnosis, and power forecasting for photovoltaic fields: A review. Int. J. Photoenergy 2017, 2017, 1356851. [Google Scholar]
- Tsanakas, J.A.; Ha, L.; Buerhop, C. Faults and infrared thermographic diagnosis in operating c-Si photovoltaic modules: A review of research and future challenges. Renew. Sustain. Energy Rev. 2016, 62, 695–709. [Google Scholar] [CrossRef]
- Høiaas, I.; Grujic, K.; Imenes, A.G.; Burud, I.; Olsen, E.; Belbachir, N. Inspection and Condition Monitoring of Large-Scale Photovoltaic Power Plants: A Review of Imaging Technologies. Renew. Sustain. Energy Rev. 2022, 161, 112353. [Google Scholar] [CrossRef]
- Meribout, M.; Kumar Tiwari, V.; Pablo Peña Herrera, J.; Baobaid, A.N.M.A. Solar Panel Inspection Techniques and Prospects. Measurement 2023, 209, 112466. [Google Scholar] [CrossRef]
- Bellezza Quarter, P.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for cooperative inspection of PV plants. IEEE J. Photovolt. 2014, 4, 1107–1113. [Google Scholar]
- Hu, Y.; Cao, W.; Ma, H.; Finney, S.J.; Li, D. Identifying PV Module Mismatch Faults by a Thermography-Based Temperature Distribution Analysis. IEEE Trans. Device Mater. Reliab. 2014, 14, 951–960. [Google Scholar] [CrossRef]
- López-Fernández, L.; Lagüela, S.; Fernández, J.; González-Aguilera, D. Automatic Evaluation of Photovoltaic Power Stations from High-Density RGB-T 3D Point Clouds. Remote Sens. 2017, 9, 631. [Google Scholar] [CrossRef] [Green Version]
- Tsanakas, J.A.; Chrysostomou, D.; Botsaris, P.N.; Gasteratos, A. Fault diagnosis of photovoltaic modules through image processing and Canny edge detection on field thermographic measurements. Int. J. Sustain. Energy 2015, 34, 351–372. [Google Scholar] [CrossRef]
- Afifah, A.N.N.; Indrabayu; Suyuti, A.; Syafaruddin. Hotspot detection in photovoltaic module using Otsu thresholding method. In Proceedings of the IEEE International Conference on Communication, Networks and Satellite (Comnetsat), Batam, Indonesia, 17–18 December 2020; pp. 408–412. [Google Scholar]
- Aghaei, M.; Grimaccia, F.; Gonano, C.A.; Leva, S. Innovative automated control system for PV fields inspection and remote control. IEEE Trans. Ind. Electron. 2015, 62, 7287–7296. [Google Scholar] [CrossRef]
- Henry, C.; Poudel, S.; Lee, S.-W.; Jeong, H. Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera. Appl. Sci. 2020, 10, 3802. [Google Scholar] [CrossRef]
- Piccinini, F.; Pierdicca, R.; Malinverni, E.S. A Relational Conceptual Model in GIS for the Management of Photovoltaic Systems. Energies 2020, 13, 2860. [Google Scholar] [CrossRef]
- Sánchez-Aparicio, M.; Martín-Jiménez, J.; Del Pozo, S.; González-González, E.; Lagüela, S. Ener3DMap-SolarWeb roofs: A geospatial web-based platform to compute photovoltaic potential. Renew. Sustain. Energy Rev. 2021, 135, 110203. [Google Scholar] [CrossRef]
- Yahya, Z.; Imane, S.; Hicham, H.; Ghassane, A.; Safia, E.B.I. Applied imagery pattern recognition for photovoltaic modules’ inspection: A review on methods, challenges and future development. Sustain. Energy Technol. Assess. 2022, 52, 102071. [Google Scholar] [CrossRef]
- Wang, X.; Yang, W.; Qin, B.; Wei, K.; Ma, Y.; Zhang, D. Intelligent monitoring of photovoltaic panels based on infrared detection. Energy Rep. 2022, 8, 5005–5015. [Google Scholar] [CrossRef]
- Oña, E.R.D.; Rodríguez-Martin, M.; Rodríguez-Gonzálvez, P.; Mora, R.; González-Aguilera, D. WELDMAP: A Photogrammetric Suite Applied to the Inspection of Welds. Appl. Sci. 2022, 12, 2553. [Google Scholar] [CrossRef]
- Oña, E.R.D.; Sánchez-Aparicio, M.; Del Pozo, S.; González-Aguilera, D. INSPECTORMAP: A Spatial Data Infrastructure Applied to the Maintenance of Solar Plants Using Free Satellite Imagery. Appl. Sci. 2022, 12, 70. [Google Scholar]
- Moser, D.; Del Buono, M.; Bresciani, W.; Veronese, E.; Jahn, U.; Herz, M.; Janknecht, E.; Ndrio, E.; De Brabandere, K.; Richter, M. Technical risks in PV projects development and PV plant operation D1.1. D2.1. Solar Bankability Project 2016, 1, 1–139. [Google Scholar]
- Cledat, E.; Jospin, L.V.; Cucci, D.A.; Skaloud, J. Mapping quality prediction for RTK/PPK-equipped micro-drones operating in complex natural environment. ISPRS J. Photogramm. Remote Sens. 2020, 167, 24–38. [Google Scholar] [CrossRef]
- Furukawa, Y.; Hernández, C. Multi-View Stereo: A Tutorial, Foundations and Trends® in Computer Graphics and Vision; Now Publishers Inc.: Hanover, MA, USA, 2015; Volume 9, pp. 1–148. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Wu, C. A GPU Implementation of Scale Invariant Feature Transform (SIFT). Available online: https://github.com/pitzer/SiftGPU (accessed on 12 April 2022).
- Muja, M.; Lowe, D.G. Fast approximate nearest neighbors with automatic algorithm configuration. VISAPP 2009, 2, 2. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Schönberger, J.L.; Frahm, J. Structure-from-Motion Revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Łukaszyk, S. A new concept of probability metric and its applications in approximation of scattered data sets. Comput. Mech. 2004, 33, 299–304. [Google Scholar] [CrossRef]
- Gharibi, H.; Habib, A. True Orthophoto Generation from Aerial Frame Images and LiDAR Data: An Update. Remote Sens. 2018, 10, 581. [Google Scholar] [CrossRef]
- Kraus, K. Photogrammetry; Ferd. Dummler’s Verlag: Bonn, Germany, 1993; Volume 1, Fundamentals and standard processes; Volume 2, Advanced methods and applications. [Google Scholar]
- Kudelka, M.; Horak, Z.; Voženílek, V.; Snasel, V. Orthophoto feature extraction and clustering. Neural Netw. World 2012, 22, 103–121. [Google Scholar] [CrossRef]
- Visvalingam, M.; Whyatt, J.D. The Douglas-Peucker Algorithm for Line Simplification: Re-evaluation through Visualization. Comput. Graph. Forum. 2007, 9, 213–225. [Google Scholar] [CrossRef]
- Martin, E.; Kriegel, H.-P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Tran, Q.H.; Han, D.; Kang, C.; Haldar, A.; Huh, J. Effects of Ambient Temperature and Relative Humidity on Subsurface Defect Detection in Concrete Structures by Active Thermal Imaging. Sensors 2017, 17, 1718. [Google Scholar] [CrossRef]
- Ferreira, R.A.; Pottie, D.L.; Dias, L.H.; Cardoso Filho, B.J.; Porto, M.P. A Directional-Spectral Approach to Estimate Temperature of Outdoor PV Panels. Sol. Energy 2019, 183, 782–790. Available online: https://www.sciencedirect.com/science/article/pii/S0038092X19302786 (accessed on 7 February 2023). [CrossRef]
- Rodríguez-Gonzálvez, P.; Garcia-Gago, J.; Gomez-Lahoz, J.; González-Aguilera, D. Confronting Passive and Active Sensors with Non-Gaussian Statistics. Sensors 2014, 14, 13759–13777. [Google Scholar] [CrossRef]
- Kamran, A.; Khan, N.; Wajahat, A.; Hassan, A.; Khan, Y.; Yang, Y.; Shahrukh, A. Hotspot diagnosis for solar photovoltaic modules using a Naive Bayes classifier. Sol. Energy 2019, 190, 34–43. [Google Scholar]
- Hernandez-Lopez, D.; Felipe-Garcia, B.; Gonzalez-Aguilera, D.; Arias-Perez, B. An automatic approach to UAV flight planning and control for photogrammetric applications. Photogramm. Eng. Remote Sens. 2013, 79, 87–98. [Google Scholar] [CrossRef]
- Fraser, C.S. Digital camera self-calibration. ISPRS J. Photogramm. Remote Sens. 1997, 52, 149–159. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drone Platform | Camera Sensors | GNSS/INS Sensors | ||
|---|---|---|---|---|
| RGB | IRT | GNSS/RTK | INS | |
| RGB–Phantom 4 Thermal–DJI Matrice 600 | FC6310R, Resolution: 5472 × 3648 pixels Focal length: 8.8 mm | Flir Duo Pro R Resolution: 640 × 512 pixels Focal length: 13 mm | GPS: L1/L2; GLONASS: L1/L2; Vertical 2.5 cm Horizontal 2 cm | APX-15 RMS ERROR INS: Roll: 0.02 Deg Pitch: 0.02 Deg Heading: 0.15 Deg |
| Condor | Sony ILCE-6000 Resolution: 6000 × 4000 pixels Focal length: 16 mm | Workswell Wiris Resolution: 640 × 512 pixels Focal length: 13 mm | GPS: L1/L2; GLONASS: L1/L2; BeiDou: B1/B2; Galileo E1/E5a Vertical 1.5 cm Horizontal 1 cm | RMS ERROR INS: Roll: 0.02 Deg Pitch: 0.02 Deg Heading: 0.15 Deg |
| Location of PV Plants | RGB | IRT |
|---|---|---|
| PV plant, Albacete | f: 3549.6891 | f: 792.1776 |
| cx: −13.4458 | cx: 10.1731 | |
| cy: 12.6957 | cy: 4.4445 | |
| k1: −0.25872317 | k1: 0.31691682 | |
| k2: 0.11303087 | k2: −0.03630885 | |
| p1: −0.00101272 | p1: −0.00292202 | |
| p2: −0.00031058 | p2: −0.00170231 | |
| PV plant, Caceres | f: 3952.0199 | f: 496.8117 |
| cx: 2944.9719 | cx: 326.6674 | |
| cy: 1915.3403 | cy: 261.1664 | |
| k1: 0.05358915 | k1: −0.30101814 | |
| k2: 0.03855508 | k2: 0.137739510 | |
| p1: 0.00617445 | p1: −0.00177455 | |
| p2: 0.00389557 | p2: −0.00001426 |
| Location of PV Plants | Hot Spot Coordinates | Semantic Information | ΔΤμεδιαν | ΔΤΒΩΜς | ΔΤμιν | ΔΤμαξ | Area |
|---|---|---|---|---|---|---|---|
| (X, Y, UTM) | (Array/Panel) | (°C) | (°C) | (°C) | (°C) | (m2) | |
| PV plant, Albacete | H1: (608693.292, 4298641.314) | Array_2_Panel_6 | 14.8 | 0.2 | 14.6 | 15.2 | 0.0006 |
| H2: (608686.307, 4298603.146) | Array_9_ Panel_1 | 15.7 | 2.4 | 10.1 | 30.3 | 0.1514 | |
| H3: (608593.379, 4298588.754) | Array_11_ Panel_4 | 12.1 | 1.5 | 10 | 16.3 | 0.0343 | |
| H4: (608722.99, 4298602.731) | Array_16_ Panel_6 | 12.9 | 2 | 10 | 15.4 | 0.0184 | |
| H5: (608816.908, 4298616.944) | Array_14_ Panel_1 | 14 | 2.6 | 10.1 | 20.7 | 0.0963 | |
| H6: (608804.4, 4298573.71) | Array_20_ Panel_2 | 15.2 | 0.6 | 14.2 | 15.9 | 0.0099 | |
| H7: (608762.854, 4298588.594) | Array_18_ Panel_5 | 14.7 | 3.3 | 10.4 | 23.2 | 0.0596 | |
| H8: (608684.113, 4298520.685) | Array_29_ Panel_4 | 14.1 | 2.2 | 10.1 | 20.9 | 0.0426 | |
| H9: (608636.663, 4298534.604) | Array_27_ Panel_1 | 13 | 2 | 10.1 | 17.5 | 0.02 | |
| H10: (608681.254, 4298528.101) | Array_28_ Panel_9 | 12.5 | 2.1 | 10.5 | 15.4 | 0.0092 | |
| H11: (608913.738, 4298541.88) | Array_42_ Panel_1 | 13.4 | 2.6 | 10.1 | 20.9 | 0.0879 | |
| H12: (608665.377, 4298451.152) | Array_51_ Panel_1 | 12.5 | 0.2 | 11.8 | 13.5 | 0.0022 | |
| H13: (608677.44, 4298434.384) | Array_66_ Panel_2 | 11.6 | 0.9 | 10 | 14 | 0.0343 | |
| PV plant, Caceres | H1: (271960.445, 4338451.632) | Array_2_ Panel_2 | 14.6 | 0.1 | 14.4 | 15 | 0.0986 |
| H2: (271961.776, 4338450.219) | Array_2_ Panel_6 | 14.8 | 3.3 | 10.8 | 18.3 | 0.011 | |
| H3: (271987.440, 4338413.552) | Array_11_ Panel_3 | 14.1 | 2.7 | 10 | 22 | 0.8326 | |
| H4: (271967.000, 4338424.524) | Array_11_ Panel_5 | 14 | 2.2 | 10.3 | 23.1 | 0.0983 | |
| H5: (271965.387, 4338422.592) | Array_12_ Panel_6 | 14.5 | 2.5 | 10.4 | 20.3 | 0.0381 | |
| H6: (271919.947, 4338350.703) | Array_16_ Panel_3 | 12.7 | 0.2 | 12.1 | 13.9 | 0.0185 | |
| H7: (271923.550, 4338333.465) | Array_18_ Panel_3 | 13.3 | 1.6 | 10 | 19.4 | 0.1876 | |
| H8: (272004.211, 4338386.299) | Array_26_ Panel_5 | 13.9 | 2.2 | 10 | 22.3 | 0.0946 | |
| H9: (271956.918, 4338359.317) | Array_28_ Panel_9 | 14.3 | 2.4 | 10.3 | 21.7 | 0.0116 | |
| H10: (271988.745, 4338342.373) | Array_30_ Panel_6 | 14.2 | 3 | 10.1 | 21 | 0.1218 | |
| H11: (271941.599, 4338307.870) | Array_31_ Panel_5 | 10.6 | 0.1 | 10.4 | 10.7 | 0.0016 | |
| H12: (271933.203, 4338305.567) | Array_31_ Panel_6 | 13.9 | 2.2 | 10 | 20.9 | 0.0518 | |
| H13: (271922.018, 4338306.404) | Array_31_ Panel_7 | 11.8 | 1.9 | 10 | 15.8 | 0.0216 | |
| H14: (271975.008 4338333.946) | Array_34_ Panel_7 | 14.5 | 3.6 | 10.6 | 20.8 | 0.048 | |
| H15: (272079.122, 4338433.789) | Array_38_ Panel_7 | 12.7 | 0.3 | 12.4 | 13 | 0.2917 | |
| H16: (271961.229, 4338315.750) | Array_51_ Panel_10 | 12.9 | 0 | 12.8 | 12.9 | 0.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández-López, D.; Oña, E.R.d.; Moreno, M.A.; González-Aguilera, D. SunMap: Towards Unattended Maintenance of Photovoltaic Plants Using Drone Photogrammetry. Drones 2023, 7, 129. https://doi.org/10.3390/drones7020129
Hernández-López D, Oña ERd, Moreno MA, González-Aguilera D. SunMap: Towards Unattended Maintenance of Photovoltaic Plants Using Drone Photogrammetry. Drones. 2023; 7(2):129. https://doi.org/10.3390/drones7020129
Chicago/Turabian StyleHernández-López, David, Esteban Ruíz de Oña, Miguel A. Moreno, and Diego González-Aguilera. 2023. "SunMap: Towards Unattended Maintenance of Photovoltaic Plants Using Drone Photogrammetry" Drones 7, no. 2: 129. https://doi.org/10.3390/drones7020129