1. Introduction
With excellent autonomy and control ability, unmanned aerial vehicles (UAVs) play an important role in various engineering applications [
1,
2,
3]. Contrary to a single UAV for solo operation, the cooperation of multiple UAVs and their formation control have received increasing attention over the past decades [
4,
5,
6,
7,
8,
9]. However, in the field of maritime emergency search and rescue (MESAR), UAVs with airborne cameras are capable of searching quite a long range for targets, but their further application in MESAR is mainly restricted by limited battery supply and the lack of the perception of the close-quarter maritime environment. Conversely, unmanned water surface vehicles (UWSVs) with sufficient power supply and close-quarter surface detection systems can effectively overcome the power and perception deficiencies of UAVs. Whereas UWSVs have a limited perception of a wide range of surrounding dynamic environments, resulting in adverse effects on navigation safety. By contrast, the cooperation of UAVs and UWSVs can benefit from the advantages of both and improve the efficiency and robustness of MESAR missions. Thus, the coordination control of the UAV-UWSV system is meaningful and should be further studied [
10,
11].
It should be noted that the UAV-UWSV system is typically heterogeneous, i.e., with non-identical dynamic representations [
12], which renders the coordination control methods for homogeneous multiagent systems unavailable. There have been some great works on UAV-UWSV systems. The authors of [
13] studied the cooperative path-following problem of UAV-UWSV systems based on dynamic surface control and event-triggered techniques. In [
14], a spatial mapping guidance law was developed to provide the reference heading angles for the UAV and UWSV, and an adaptive fuzzy control law was subsequently designed to track the reference path. Authors of [
15] proposed a cooperative UAV-UWSV platform and a dynamic positioning algorithm to guarantee that UAVs can land on the UWSV steadily. Note that [
13,
14,
15] particularly focused on a single pair of UAV-UWSV. Ref. [
16] addressed the formation control problem of a UAV-UWSV heterogeneous multiagent system and provided sufficient conditions to achieve the consensus. In [
17], a distributed formation protocol was proposed such that the leader UAV and follower UWSVs track the desired trajectory and achieve the desired formation simultaneously. Ref. [
18] proposed a formation control protocol for a UAV-UWSV heterogeneous system based on leader-following distributed consensus and artificial potential field. Nevertheless, the above-mentioned studies are based on the assumption that "the global positioning is available for UAVs and UWSVs", which heavily relies on external infrastructure and high-accuracy sensors and, therefore, is difficult to set up in a harsh maritime environment. Due to the accessibility of relative bearings by vision-based localization systems and wireless sensor arrays, a bearing-only control protocol is promising to perform the MESAR tasks via onboard sensors.
There have been numerous works on bearing-only formation control. Early studies such as [
19,
20] focused on the bearing angle between neighbor agents to achieve the target formation, but it is limited to 2D circumstances. On the basis of bearing rigidity [
21], the relative bearing vector is now mostly employed to overcome this limitation. In [
22], bearing-only formation control laws were designed for single-integrator, double-integrator and nonholonomic vehicles to achieve formation tracking control in cases where the leaders move with constant velocity. In [
23], a velocity-estimation-based formation control scheme was proposed, which solved the problem of the time-varying velocity of leaders. Authors in [
24] designed a bearing-only control law for networked robots with nonholonomic constraints. Ref. [
25] presented a finite-time bearing-only formation control scheme, wherein a finite-time orientation estimator was incorporated to remove the dependence on global coordination frame. It is worth noting that the communication and sensing graphs in [
22,
23,
24,
25] are assumed to be bidirectional, i.e., we should keep constant mutual visibility among all inter-agent pairs. This is difficult to satisfy due to the limited field of view. To remove such a constraint, [
26] proposed bearing-based control laws under a particular directed graph, namely the leader-first follower (LFF) structure, which can be generated via bearing-based Henneberg construction. The LFF graph has a promising feature in that the translation of the formation is determined by the leader, and the formation scaling motion is determined by the relative distance between the leader and the first follower; thus, the formation’s maneuvers can be flexibly managed. Motivated by this, we have recently studied bearing-based formation control problems for UAVs [
27] and UWSVs [
28] with LFF structures. However, the methods in [
26,
27,
28] were not bearing-only because the distance between the leader and the first follower should be measured accurately in order to maintain the formation scale.
Another thing worth mentioning is that the above methods concentrated on homogeneous multiagent systems, and, therefore, cannot be applied to a UAV-UWSV heterogeneous system. Ref. [
29] studied finite-time bearing-only formation control problem of heterogeneous multi-robot systems with collision avoidance, however, the order of each robot is assumed to be identical. In our mix-order UAV-UWSV system, UAVs can navigate in three-dimensional (3D) space, while the UWSVs maneuver in the two-dimensional (2D) plane. This results in more difficulties, since the UWSVs can measure the 3D relative bearing vectors to the neighboring UAVs but are only allowed to translate in the horizontal plane in order to maintain the desired 3D bearings. In other words, the formation control problem of UAV-UWSV systems is subject to spatial constraints, which makes it more complex and difficult. To the best of the authors’ knowledge, the bearing-only formation control problem for UAV-UWSV heterogeneous multiagent system is hitherto rare.
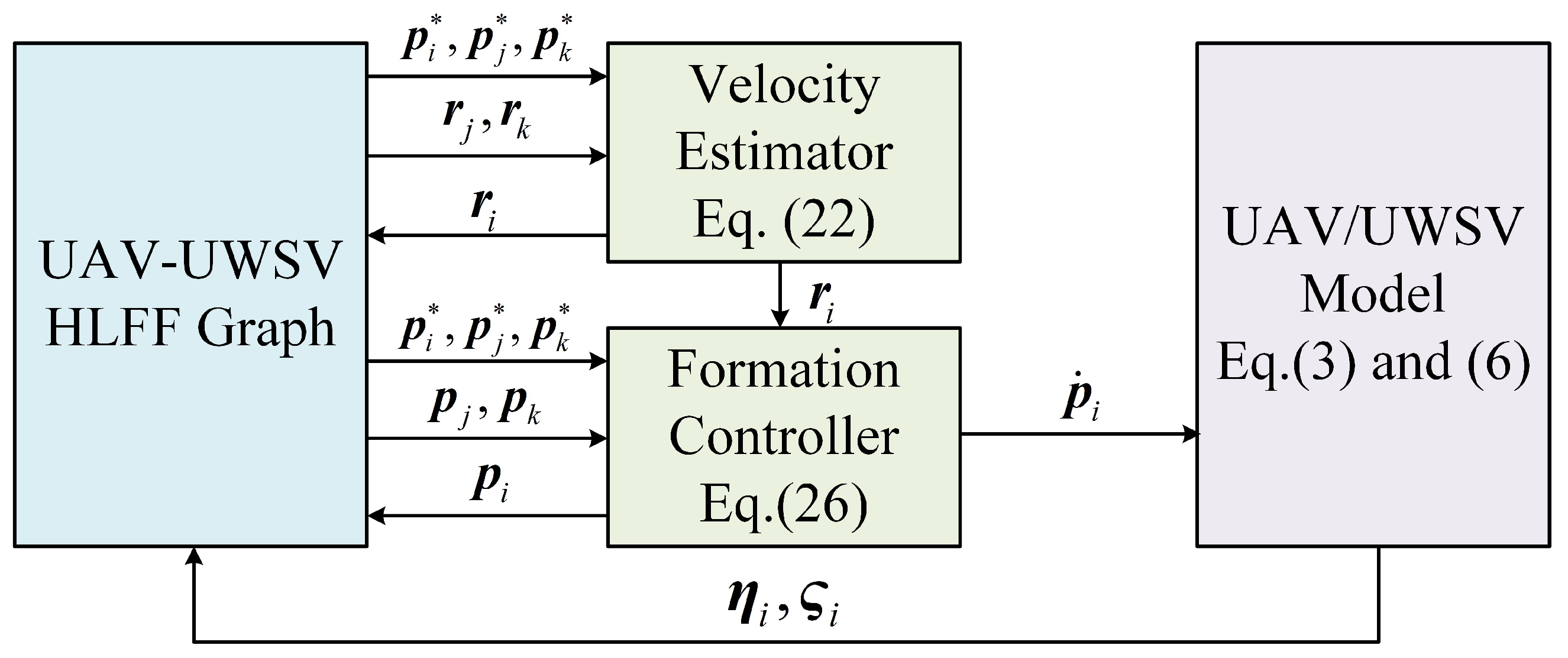
Motivated by the above discussions, we propose a novel bearing-only formation control scheme for a UAV-UWSV heterogeneous multiagent system. We first describe the communication and sensing networks of the system via a directed and acyclic graph called the heterogeneous leader-first follower (HLFF) graph. On this basis, a velocity-estimation-based control scheme is proposed, which consists of a finite-time distributed observer for estimating the reference velocity of each follower and a bearing-only formation control law to achieve the desired formation without global positioning. It is shown that the formation tracking error converges to zero asymptotically. The main contributions of this article are summarized as follows.
We extend the LFF graph for the homogeneous multiagent systems to the HLFF graph for the heterogeneous system. The HLFF graph is verified to have distinct properties from LFF graphs as a single-leader bearing-only graph since both the translation and scale of the formation can be uniquely determined by the position of the leader other than the position of the leader and its distance between the leader and the first follower. Thus the distance measurements between the leader and the first follower are not required as [
26,
27,
28].
Compared with the existing control methods for UAV-UWSV systems [
13,
14,
15,
16,
17,
18], which heavily rely on global positioning, our proposed control scheme only requires relative bearing vectors between neighboring vehicles, which can be obtained via onboard sensors such as vision cameras and sensing arrays.
Different from the bearing-only formation control for a homogeneous system [
22,
23,
24,
25] and a heterogeneous system with identical system order [
29], our proposed formation protocol can be applied to heterogeneous mixed-order systems, which is more challenging and complex as some agents have spatial constraints.
The remainder of this paper is organized as follows:
Section 2 presents the preliminaries and formulates the bearing-only formation control problem for a UAV-UWSV heterogeneous system. The proposed unified formation control scheme, including finite-time distributed observer and bearing-only formation control law, is detailed in
Section 3. The comparative simulation results are presented in
Section 4, after which we conclude the paper.
2. Preliminaries and Problem Formulation
2.1. Model of UAV and UWSV
This paper investigates the formation control problem of UAV-UWSV heterogeneous multiagent system, and thus we only consider the kinematic models of UAVs and UWSVs that are selected from [
30,
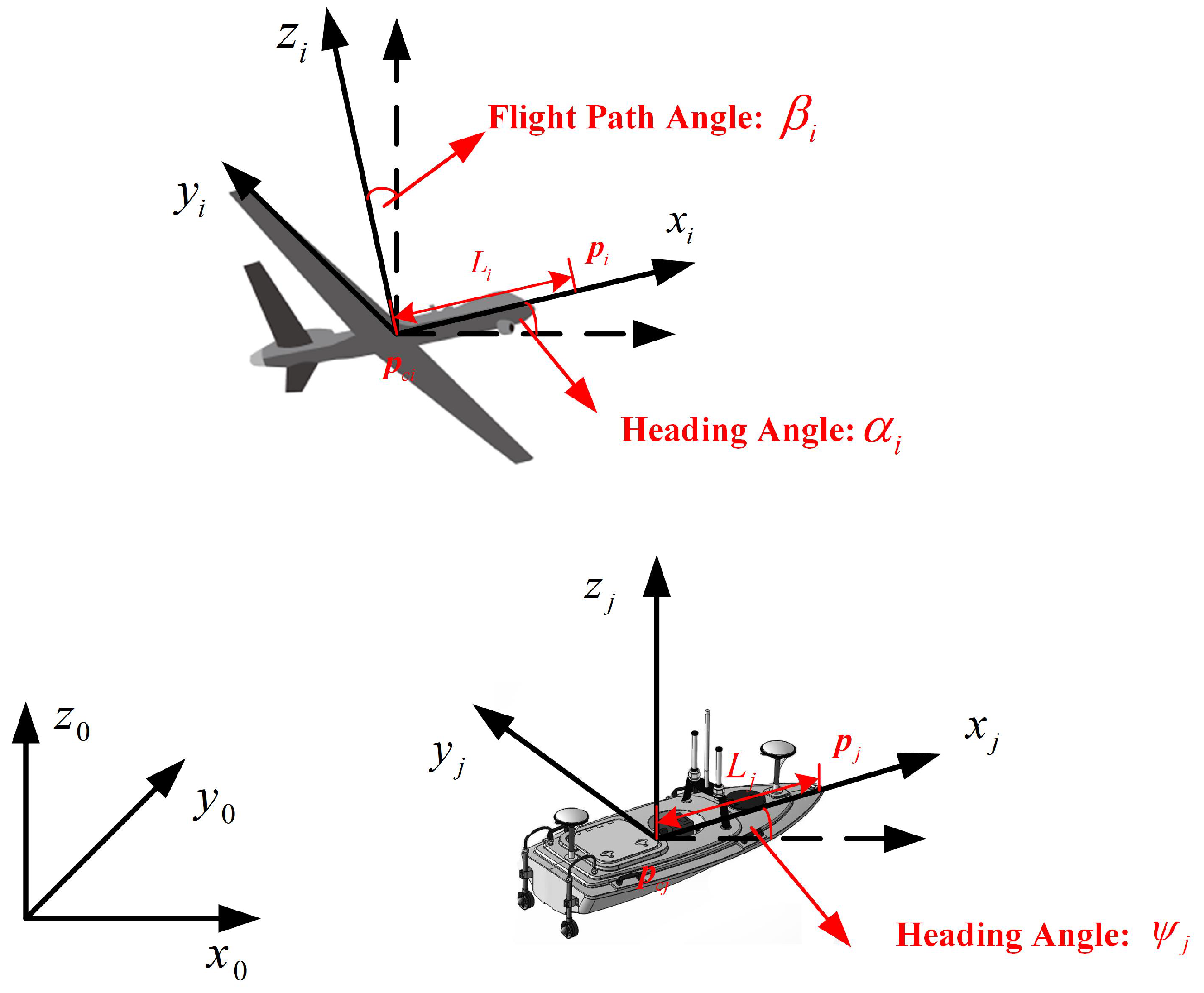
31]. As shown in
Figure 1,
is the earth-fixed coordinate frame, and
is the body-fixed coordinate frame of the
ith agent.
2.1.1. UAV Model
The fixed-wing UAV is employed in our heterogeneous system, and the kinematics are described as [
27].
where
is the position coordinate of the mass center of
ith-UAV,
and
represent the heading angle and flight path angle,
is the airspeed and
and
are the angular rates. Inspired by [
31,
32], the following coordinate transformation is performed, as shown in
Figure 1. The hand position
is at a distance
from the center of mass
, as defined below.
where
,
, respectively. Then, we have
where
. By inversion, one has
, where
2.1.2. UWSV Model
For the sake of simplicity, we assume that the UWSVs in this research is fully actuated, i.e., the UWSVs can be individually controlled in heave, sway and spin directions. The kinematic model of
jth-UWSV is described as follows [
28]
where
is the position coordinate of the mass center of
jth-UWSV. Since UWSVs can only maneuver over the sea surface, we intentionally regulate the altitude of UWSVs as zero.
,
and
are the surge, sway and yaw angular velocity, respectively.
Similarly, with the hand position
at a distance
from the center of mass
, we have
where
. By inversion, we have
with
2.2. Heterogeneous Leader-First Follower Formation
Consider a UAV-UWSV heterogeneous multiagent system with m UAVs and n UWSVs. The communication and sensing graph of the system can be described by a directed graph , where is a vertex set with and is an edge set. If there exists from to , is called a neighbor vertex of and the neighbor set of is represented as .
We associate each vertex
with the position of the
ith vehicle (including both UAVs and UWSVs). If a directed edge
exists, agent
i can receive information from agent
j. The stacked vector
is referred to as a configuration of
. The formation
is defined with the directed graph
and the configuration
[
33]. With
as the displacement vector of
and
, the distance of
and
is defined as
. The bearing vector
is defined as the unit vector from
to
as shown below
Unlike position-based formation control approaches [
13,
14,
15,
16,
17,
18], in which every vehicle has access to its global position, bearing-based approaches require each agent to maintain one or several bearing vectors with its neighbors, which makes the uniqueness of the bearing-based formation a fundamental problem. Obviously, it is unnecessary to control all bearing vectors to maintain a target formation. According to the bearing rigidity theory proposed in [
21], the target formation is achieved if a specific subset of desired bearing vectors is attained in an undirected graph. In practice, it is difficult to guarantee the agents can communicate with each other directly, whereas the uniqueness of the bearing-based formation in directed graphs remains unsolved so far. As a primary study, [
26] discussed the uniqueness of the bearing-based formation in a certain class of directed graph named LFF graph under the following assumption.
Assumption 1 ([
26]).
The target formation is characterized by a set of desired constant bearing constraints with the following conditions: (1) The target bearing constraints are achievable. In other words, there exists a configuration such that . (2) For agent (), the desired bearing vectors to its two neighbors and are not co-linear, i.e., . With this assumption, the definition of LFF graph is given as follows.
Definition 1. (LFF Graph) [26] A LFF graph is an acyclic and rooted in-branching directed graph with n vertices () and well-selected directed edges. The n vertices are composed of one leader vertex , one first follower vertex and follower vertices . The directed edges consist of one from the first follower vertex to the leader vertex and two for each follower vertex. Inspired by the above study, we extend the LFF graph to a heterogeneous multiagent system and propose a heterogeneous leader-first follower (HLFF) formation. With the above assumption, the definition of an HLFF graph for m UAVs and n UWSVs is given as follows.
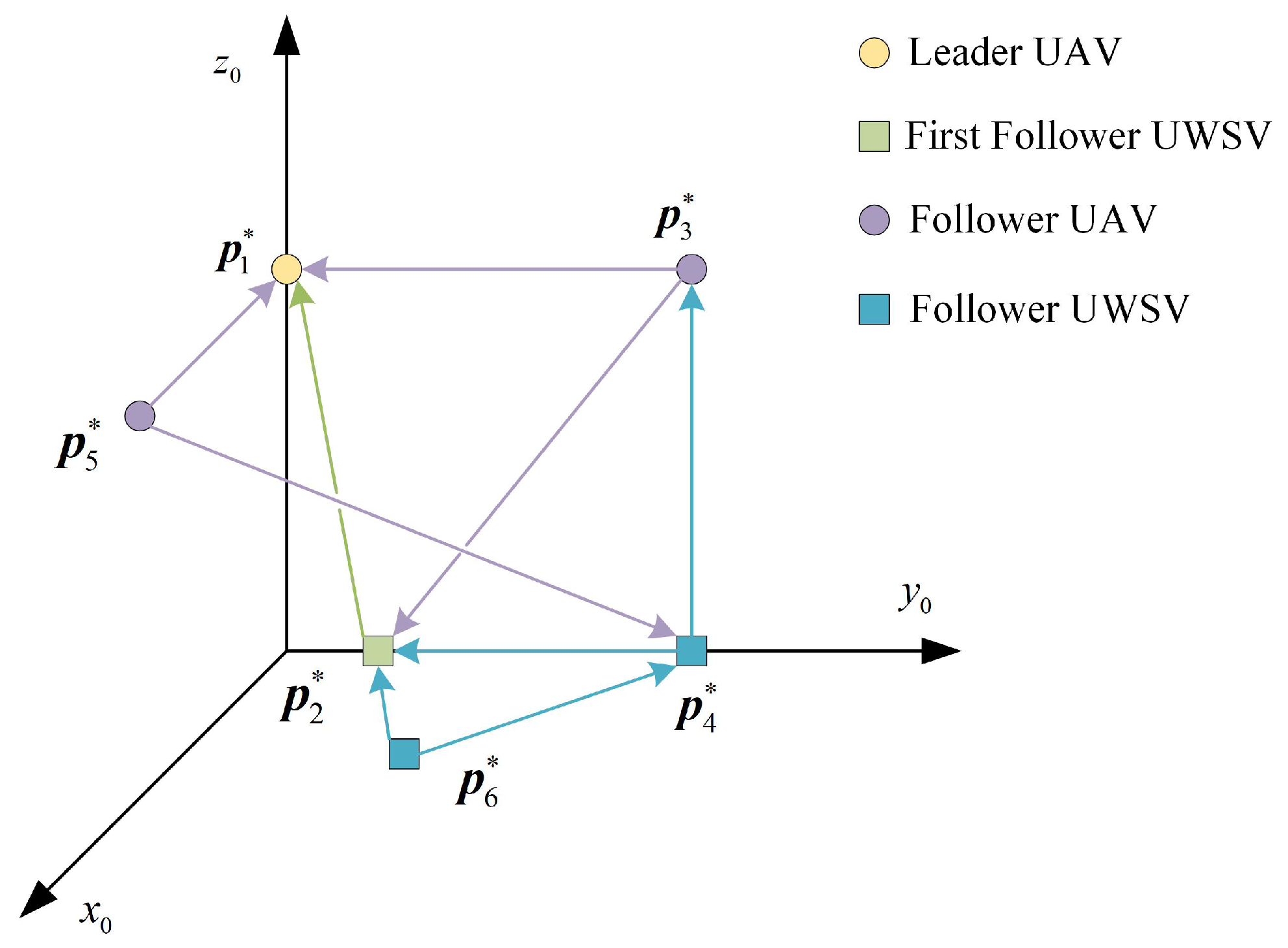
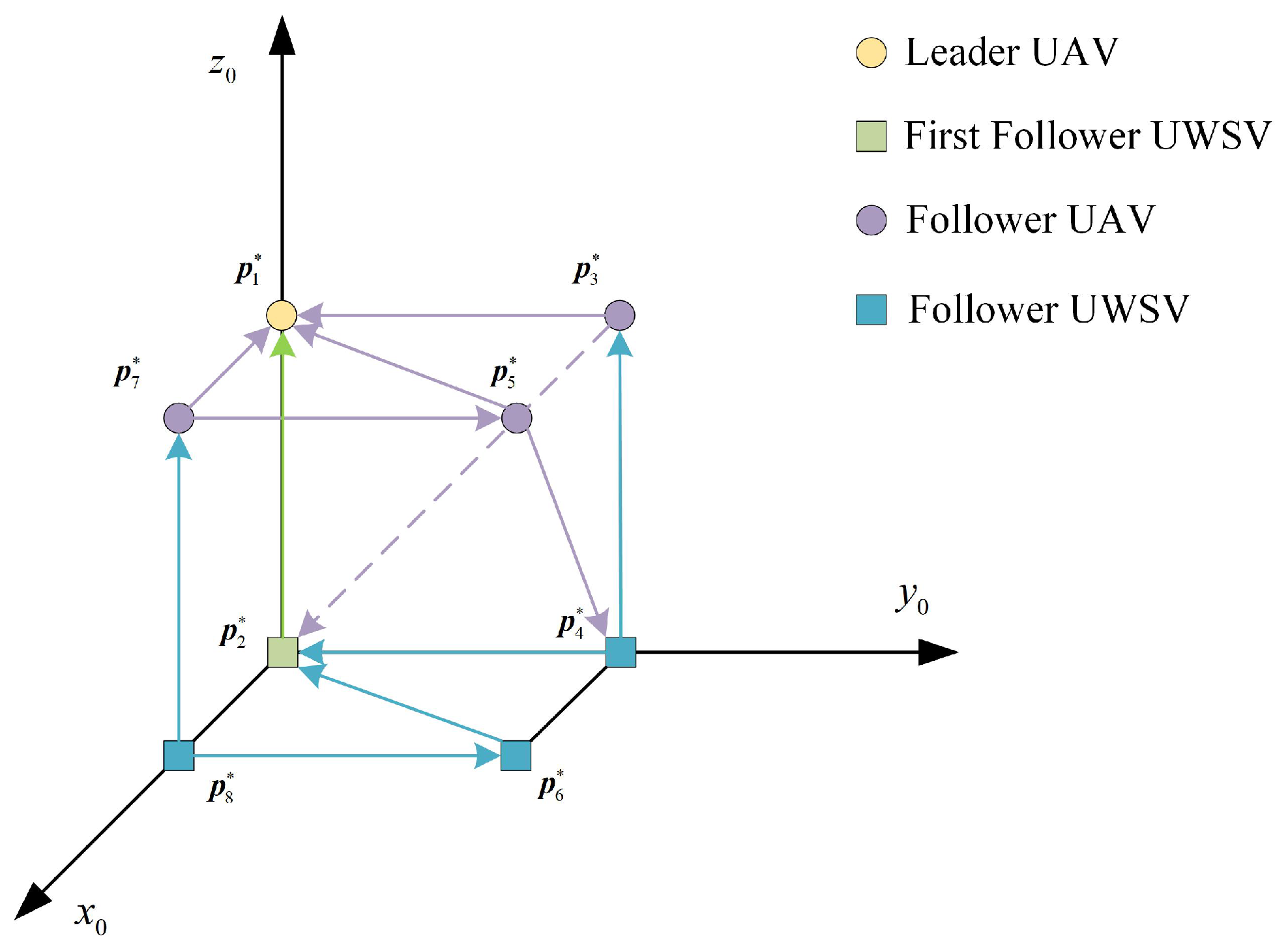
Definition 2. (HLFF Graph) An HLFF graph is an acyclic and rooted in-branching directed graph with m UAV vertices, n UWSV vertices and well-selected directed edges. The vertices are composed of one leader UAV vertex , one first follower UWSV vertex and and follower vertices . The directed edges consist of one from the first follower UWSV vertex to the leader UAV vertex and two for each other follower vertices.
Remark 1. The LFF graph concentrates on homogeneous systems, and, therefore, it cannot be applied directly to a mixed-order heterogeneous system such as the UAV-UWSV system. That is because the UWSVs can measure the three-dimensional (3D) bearing vector between UWSV and UAV, but they can only maneuver in the two-dimensional (2D) plane to achieve the 3D formation. However, in the LFF graph, it is assumed that all agents can move in the same dimensional space.
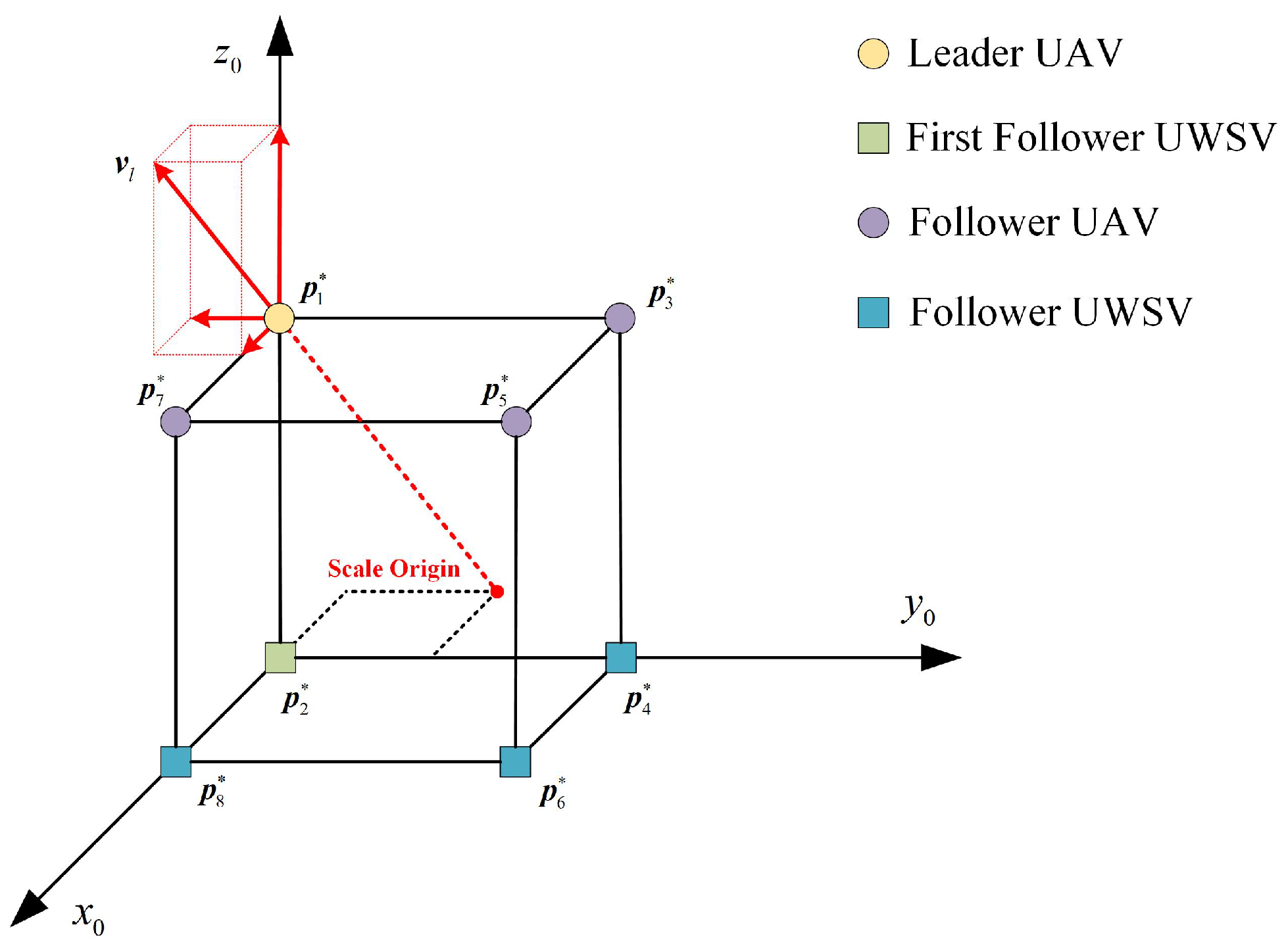
Without loss of generality, let leader vertex
represent the position of the leader UAV, vertex
represents the position of the first follower UWSV, vertex
represents the position of the
ith-UAV or UWSV.
has only one directed edge
, which means it can measure the relative bearing vector
from the leader UAV. Each follower agent has two directed edges to receive information from its neighbors. An example of an HLFF graph with three UAVs and three UWSVs is shown in
Figure 2.
2.3. Properties of HLFF Graph
This section discusses some properties of HLFF graphs, including the uniqueness of the HLFF graph and the translational and scaling motion of the HLFF graph.
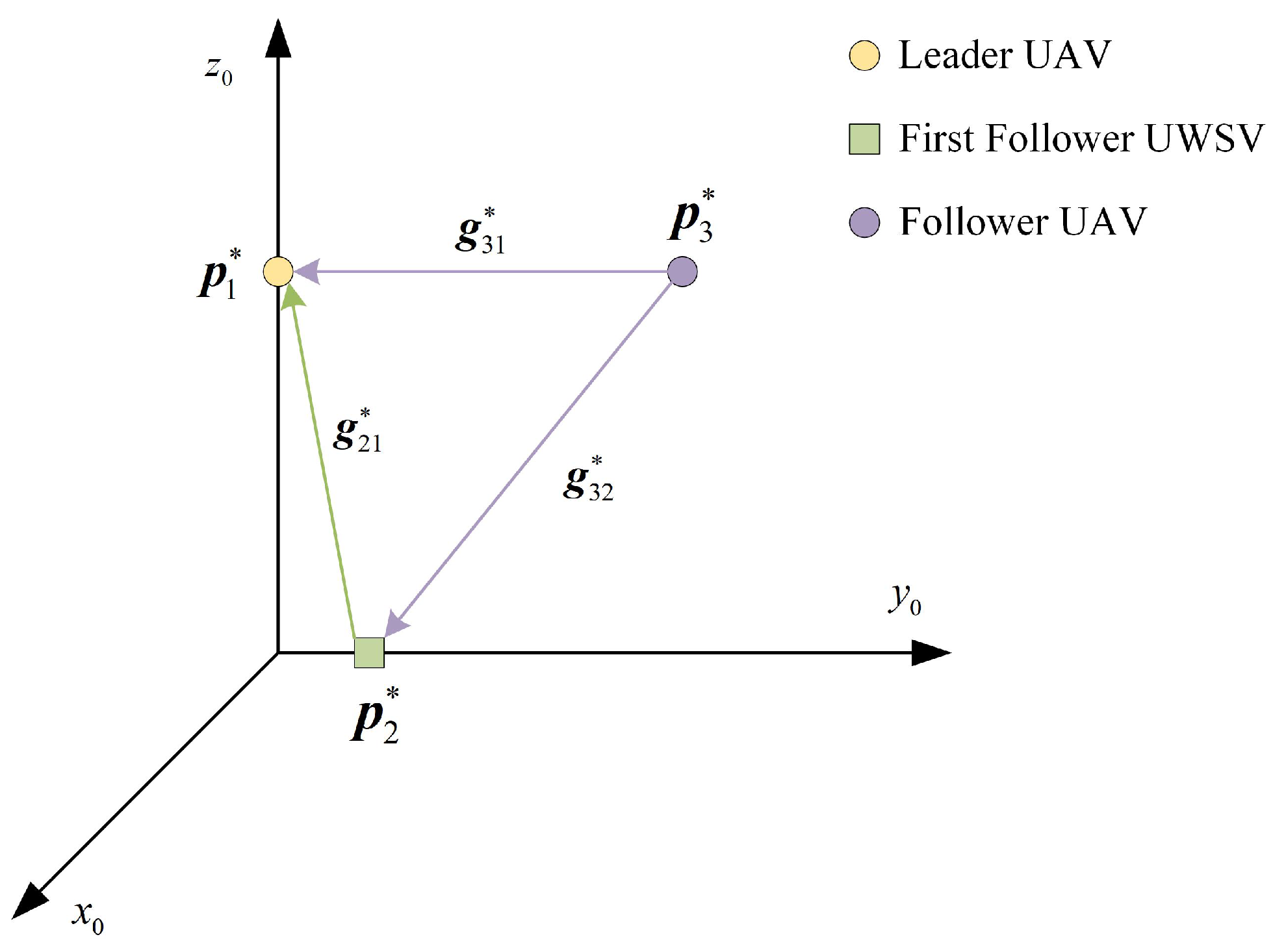
Lemma 1. (Uniqueness of HLFF graph) Consider a UAV-UWSV heterogeneous multiagent system with an HLFF graph. Under Assumption 1, given the position of the leader UAV and a set of desired bearing constraints , then, the desired formation with is uniquely determined.
Proof. As shown in
Figure 3,
is the angle between
and axis
. In triangle
, the relative position between
and
can be obtained according to trigonometric geometry
where
is the component of
on the
k-axis (
).
For the third agent, the position
satisfies two bearing vectors
and
, as shown in
Figure 3. Thus,
where
is the orthogonal projection matrix of
.
From (
10), it follows that
For
, we have
and
. As
exists under Assumption 1, and
,
are positive semidefinite matrices; we have
. Therefore,
is non-singular and
can be obtained by
Similarly, for
, the desired position can be iteratively calculated as
Thus, given the desired bearing constraints B and the position of leader UAV , the HLLF formation can be uniquely determined. □
To describe the translation and scaling of the HLFF graph, we introduce the centroid
and scale
of the HLFF graph as follows.
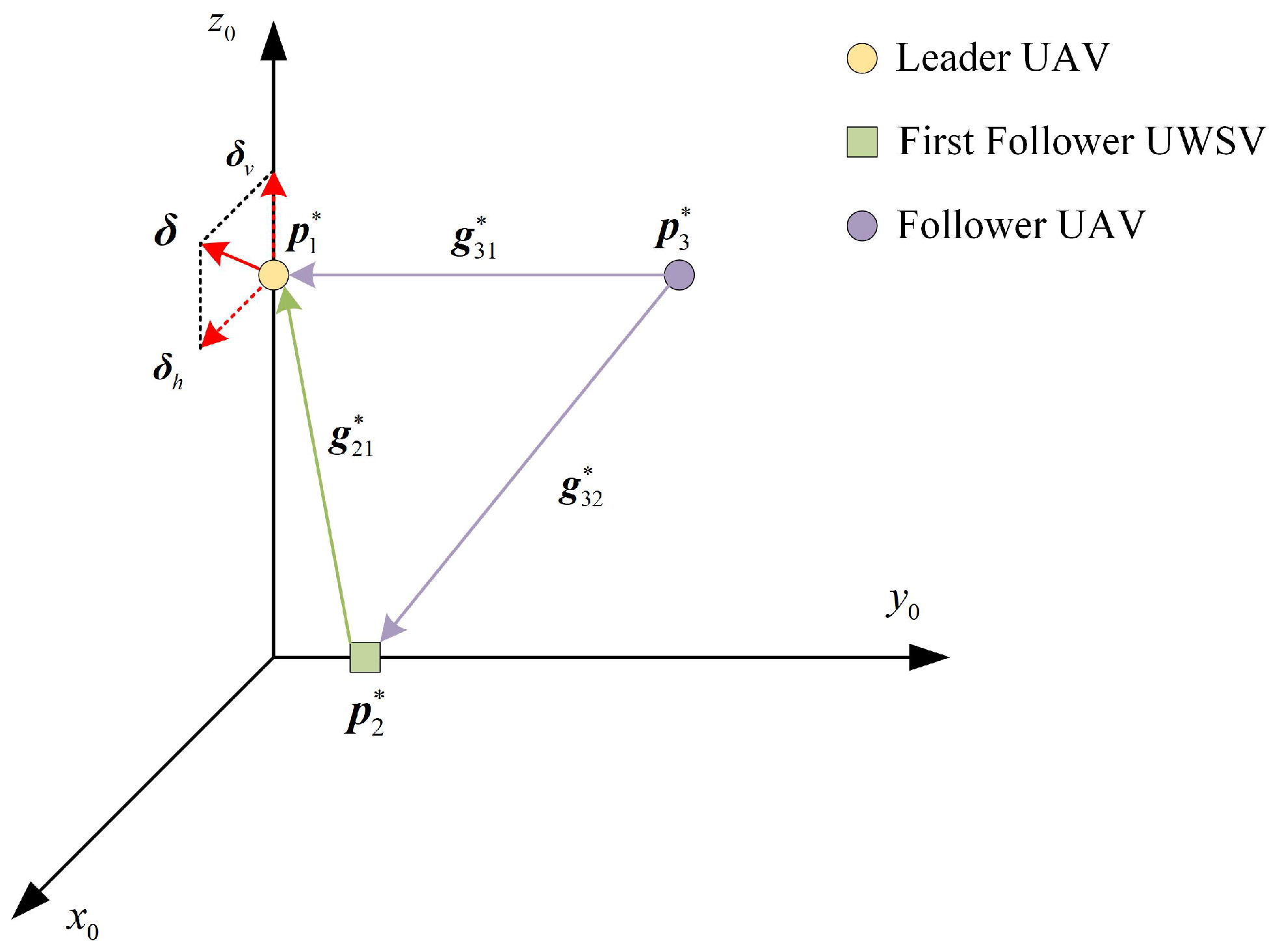
Lemma 2. (Translation and scale of HLFF graph) For an HLFF graph, given a set of bearing vectors , the translation of the entire formation is determined by the leader UAV’s horizontal motion and the scale of the entire formation is determined by the leader UAV’s vertical motion.
Proof. Similar to Lemma 1, we consider the HLFF graph shown in
Figure 3. Consider the leader UAV moves from
to
; the motion process
can be decomposed into two individual motion: horizontal motion
and vertical motion
, as shown in
Figure 4.
If the leader UAV only has horizontal motion
, we only need to prove that each follower has
. For the first follower UWSV, according to (
9), we have
As
, we have
. For the UAV follower 3, we have
The proof for
can follow the same pattern as follower 3. According to (
14), we have
, which means that the translation of the formation can be controlled by the horizontal motion of the leader UAV.
If the leader UAV only has vertical motion , we assume that . For first follower UWSV, we have according to trigonometry.
With (
9), it can be obtained that
Therefore, we have
. For the UAV follower 3, we have
Thus, .
Similarly, it can be seen that
,
. Since the HLFF graph can be generated via the bearing-based Henneberg construction; it has a spanning tree [
27].
, there exists a finite path
,
, ⋯,
that
. Then we have
Furthermore, it can be deduced that
,
. Therefore, we conclude that
Equivalently, we have , which means the scale of the HLFF graph can be controlled by the vertical motion of the leader UAV. □
Remark 2. From [25], it can be seen that LFF graph is not bearing-only, because it needs to measure the distance between the leader and the first follower accurately to control the scale of the formation, which still retains the disadvantage of distance measurement in the practical perspective. However, the HLFF graph does not need any distance measurement, which makes it a bearing-only method. Remark 3. The LFF graph needs the first follower to actively measure its distance and bearing vector from the leader to find its global position, which can be seen as a two-leader control scheme as the scaling of the formation cannot be controlled by the leader individually. However, in the HLFF graph, both translation and scaling of the formation can be controlled by the leader, which makes it a single-leader control scheme. Therefore, the HLFF graph reduces the parameters required for the formation maneuver.
2.4. Problem Formulation
Before the problem is formulated, we assume that the UAV-UWSV heterogeneous multiagent system satisfies the following assumptions:
Assumption 2. The communication graph of the system is characterized by a directed graph with an HLFF structure.
Assumption 3. The initial positions of all agents are not collocated, i.e., ().
Assumption 2 guarantees that the desired formation is uniquely determined given a set of achievable bearing vectors , and the translation and the scale of the formation can be regulated by the leader UAV .
Assumption 4. The leader UAV satisfies , and there exists a positive constant such that , that is, the acceleration of the leader is bounded.
In this paper, assuming the leader UAV moves along a predefined trajectory, we do not consider its motion control. For the sake of simplicity, we assume that there is no internal failure or external disturbance, such as potential obstacles or disruptions during the formation maneuver. With Assumption 4 and (
13), we have
(
). Under the above assumptions, our problem is formulated as follows.
Problem 1. Consider a UAV-UWSV heterogeneous multiagent system with m UAVs and n UWSVs, under Assumptions 1–4, using only relative bearing measurements and local interactions, design distributed control law for such that i () such that converges to asymptotically as .


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












