1. Introduction
Non-terrestrial networks (NTN) are an effective solution that can provide wireless communication services over uncovered or under-served areas towards Beyond 5G [
1]. NTNs are a communication platform for connecting devices in various locations ranging from the sky to seas and space, through different vehicles such as satellites, aircraft, and ships. In particular, when unmanned aerial vehicles (UAVs), also known as drones, are employed as flying wireless base stations, it becomes possible to construct wireless networks in the air, and various relevant research has been reported in this research area [
2].
In recent years, the development and applications of UAVs has shown rapid growth. Because the UAVs have very outstanding mobility that is not limited by all kinds of terrain, they can provide high convenience and good accessibility in scenarios such as package delivery in isolated areas or disaster investigation [
3,
4]. As a result, many new wireless technologies, such as Internet of Things (IoT), can be improved or extended using UAVs. However, as the development of UAVs is highly growing, the safety of UAV operations becomes an emerging issue worldwide.
For safe UAV operation issues, it is essential to develop a suitable and effective UAV control system, also called an unmanned aircraft system (UAS) [
5,
6,
7,
8]. However, for multiple UAV scenarios, awareness of neighboring flying vehicles while keeping a safe enough distance among flying objects is a very tough task. Especially for UAV applications nowadays, the flying distances for UAVs are usually very long and it is almost impossible to confirm the flying circumstance with human eyes, which makes a great threat to the UAV flight safety operation issues. Hence, a mechanism to automatically perform UAV awareness and information sharing is very important for modern UAS applications.
In traditional approaches, UAS relies on existing commercial communication networks, such as cellular or satellite networks, to enable the implementation of UAS traffic management (UTM) functions for UAVs [
9,
10,
11,
12]. However, in critical UAV scenarios, such as large-scale disasters, it is common for the communication network infrastructure to be damaged or disabled, which makes UTM ineffective. As a result, UAVs are forced to operate in high-risk conditions, so that their safety and effectiveness are hardly guaranteed.
Considering that existing cellular networks are suitable only for terrestrial communication and have limitations in supporting aerial communications, the authors of [
13] presented a future perspective on 6G-enabled UTM ecosystems, with a focus on non-terrestrial features, including aerial and satellite communication. Similarly, the authors of [
14] identified the most promising 6G enablers for UAV communication and examined the peculiarities of direct device-to-device (D2D) communications in the sky. More recently, to address collision issues, [
15] evaluated a reduction in separation distances between UAVs using Wi-Fi- and Bluetooth-aided communication techniques through simulations. The topic of integrated systems based on wireless sensor networks and UAVs has also sparked extensive discussion in [
16]. In [
17], D2D communications extended to UAV systems are considered important concepts for the future. In [
18,
19], the authors reveal the potential applications of UAV-assisted communications with AI technologies in 5G/6G systems. Undoubtedly, the most significant challenge at present is how to achieve UAV communication without any infrastructure support.
Given the aforementioned descriptions, addressing the sharing of UAV locations within the neighborhood airspace without cellular or other existing networks becomes crucial for ensuring UAV safety. In our study, this can be achieved through the implementation of vehicle-to-vehicle (V2V) communications, enabling UAVs to share their locations with each other as well as with the ground operation station. Furthermore, maintaining a safe distance between flying vehicles is essential to prevent potential collisions. This facilitates the recognition and exchange of location information for each UAV, which serves as the foundation for developing applications aimed at enhancing UAV safety through the utilization of shared location information with V2V communications [
20,
21]. By implementing these mechanisms, the risks associated with UAS can be mitigated, ensuring safer and more efficient operations in various domains.
In this paper, we develop a system for location awareness and sharing of UAVs named “Drone Mapper
” [
22]. To enable these functions, the system utilizes a V2V communication with low-power wide-area (LPWA) functionality operating in the 920 MHz band for global navigation satellite system (GNSS)-based location information sharing. The LPWA is an emerging wireless network technology designed for communication ability among low-power, especially battery-powered, devices over large geographical areas [
23]. Since the AFCCS sensors and end devices in the UAS are mainly battery-based and power-limited communication devices, LPWA works as the solution to optimize the energy consumption of the end devices in the network [
24,
25]. In addition, because the wireless technology adopted in the proposed system does not need cellular infrastructures, it can work under some tough conditions without good infrastructure such as countryside circumstances or places suffering severe disasters.
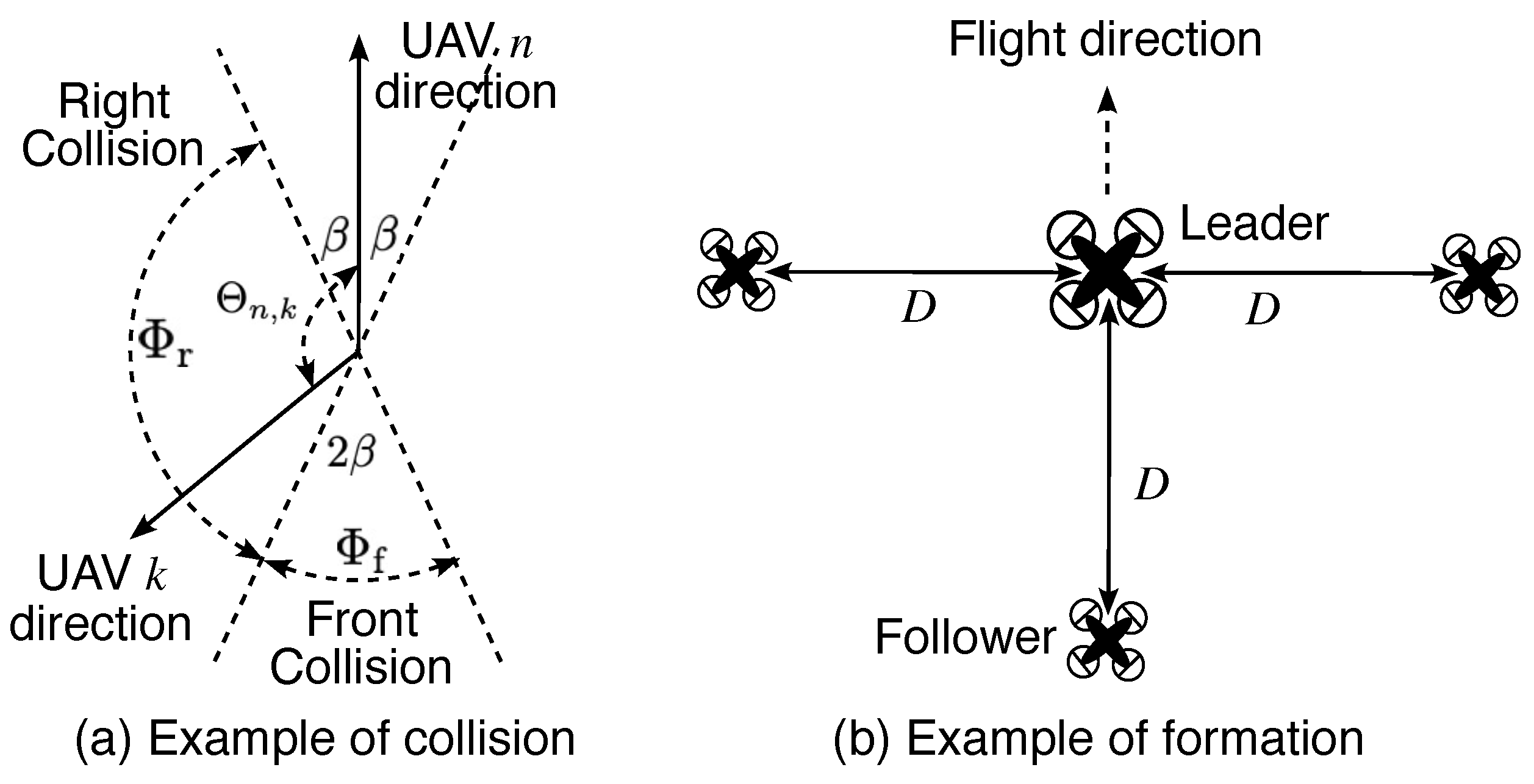
Furthermore, building upon Drone Mapper, we also develop an autonomous flight coordination control system (AFCCS) to enhance UAV safety operations. The AFCCS provides two essential functionalities for multiple UAV applications: UAV collision avoidance and UAV formation flying. To assess the effectiveness of our proposed method, we conduct field experiments specifically targeting these functionalities, and the experiments are designed to thoroughly evaluate the performance of our developed system and its associated methods.
The rest of this paper is organized as follows. The system description for this study is provided in
Section 2. The proposed methods for flight coordination control are introduced in
Section 3. Then, we conduct field experiments to evaluate the proposed methods and system in
Section 4. Finally, we provide some concluding remarks in
Section 5.
2. System Description
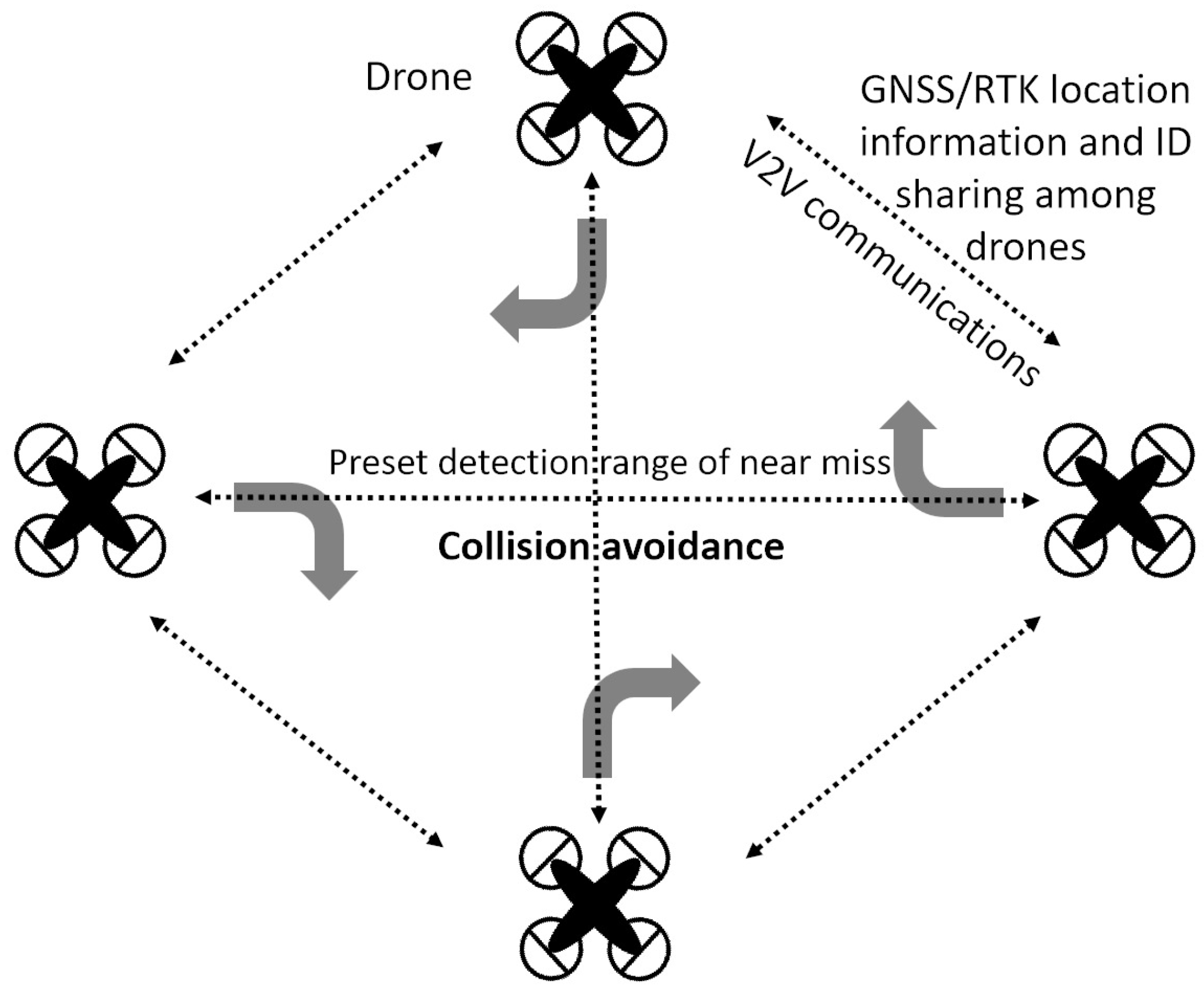
In the proposed system, there are two essential functions for UAV location awareness and sharing, which are the acquisition of UAV location using GNSS and information sharing via communication among the flying vehicles. According to the concept shown in
Figure 1, the system can be set up in UAVs and manned flying vehicles to communicate with each other. Furthermore, there is a ground station that optionally works for monitoring the flying vehicles if this functionality is required. With this system, all the location information of the flying vehicles can be measured, shared, and managed.
For the transmissions among UAVs, LPWA technology with 920 MHz is adopted in our developed system. Although there are some other possible candidates for V2V communications, such as Bluetooth or Wi-Fi in the 2.4 GHz band, these technologies work within a very short communication distance in some countries and may be affected by the existing wireless systems. Therefore, these technologies are not proper for communicating with manned aircraft. In this system, we use Frequency Shift Keying (FSK) modulation and LoRa (long-range) modulation with 920 MHz for transmissions. LoRa is widely used in LPWA technologies that can robustly transmit the shared information among UAVs in a very power-saving fashion.
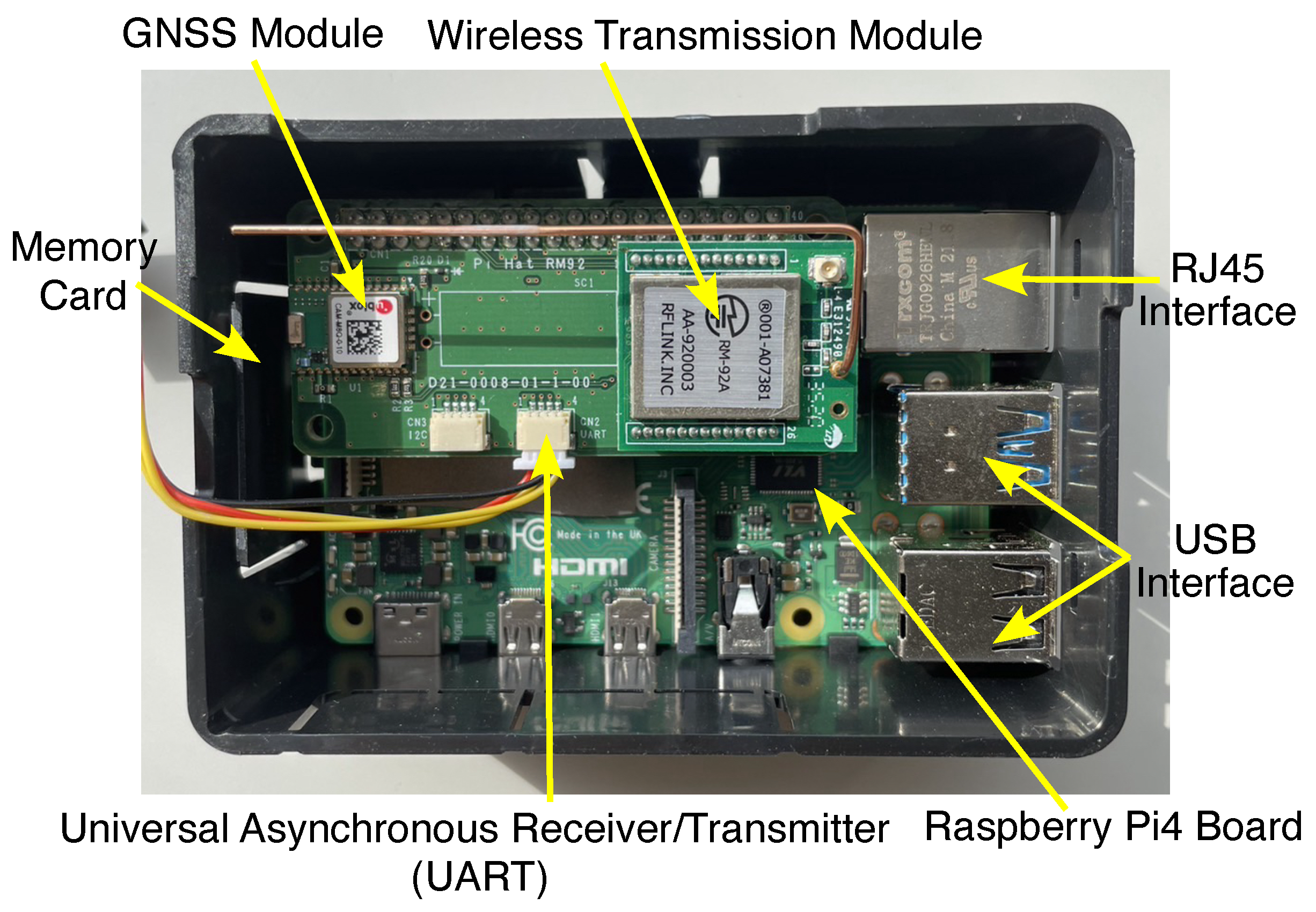
Based on the above V2V communication system, we develop an AFCCS that can be equipped in each UAV to expand its functionality. The AFCCS primarily consists of three key components: a wireless data collection and transmission device [
21], a flight coordination control device developed based on Raspberry Pi (a series of small, low-cost, single-board computers designed and developed by the Raspberry Pi Foundation, a UK-based charity organization), and a flight controller. An illustration of the AFCCS device implementation is shown in
Figure 2. In the following subsections, more detailed explanations about these components are provided.
2.1. Data Collection and Transmission Unit (Drone Mapper Device)
A system block diagram and a hardware photograph of our developed Drone Mapper device are shown in
Figure 3 and
Figure 4, respectively. The Drone Mapper device we developed can provide broadcast-based location information sharing between UAVs and the operators, as well as information sharing among UAVs and manned aircraft flying in the surrounding airspace, to realize safe operation for flying vehicles. This device includes the following features. First of all, the UAV communication system is based on a simple V2V broadcasting protocol without the need for network infrastructure such as a base station (BS) or access point (AP), so that it can be implemented with high flexibility. Moreover, the system uses the license-free 920 MHz band for telemetry, telecommand, and data transmission radio equipment following the Association of Radio Industries and Businesses (ARIB) standard of Japan [
26]. In addition, the system can cover beyond visual line of sight (BVLOS) UAV communications with multi-hop relay communication, which contains up to two hops. Finally, the system can operate a remote information sharing system via the network by sending UAV information to UTM internet services.
Regarding the detailed information of the Drone Mapper device, in
Figure 3, we show the concept of designing the UAV location and ID information-sharing system. From this figure, it can be seen that there are three types of data to be collected, which are environment data obtained with sensors or a calculator, location data obtained using GNSS, and aircraft information. The three types of data are stored in the Drone Mapper’s memory and can be exchanged among the helicopter, UAV, and ground monitoring station via the license-free 920 MHz band with LoRa communication. Note that the Drone Mapper device is capable of transmitting and receiving signals via a single communication antenna when it is implemented.
In the current version of the Drone Mapper device, we select LoRa and FSK modulation techniques for wireless data transmission. LoRa modulation is adopted mainly because of the smaller transmission power and longer transmission distance, while its transmission rate is up to max 37.5 kbps. On the contrary, FSK modulation is adopted for achieving higher transmission rates (max. 300 kbps) than the LoRa and thus improve the efficiency of data exchange. The related specifications for the developed Drone Mapper device are summarized in
Table 1.
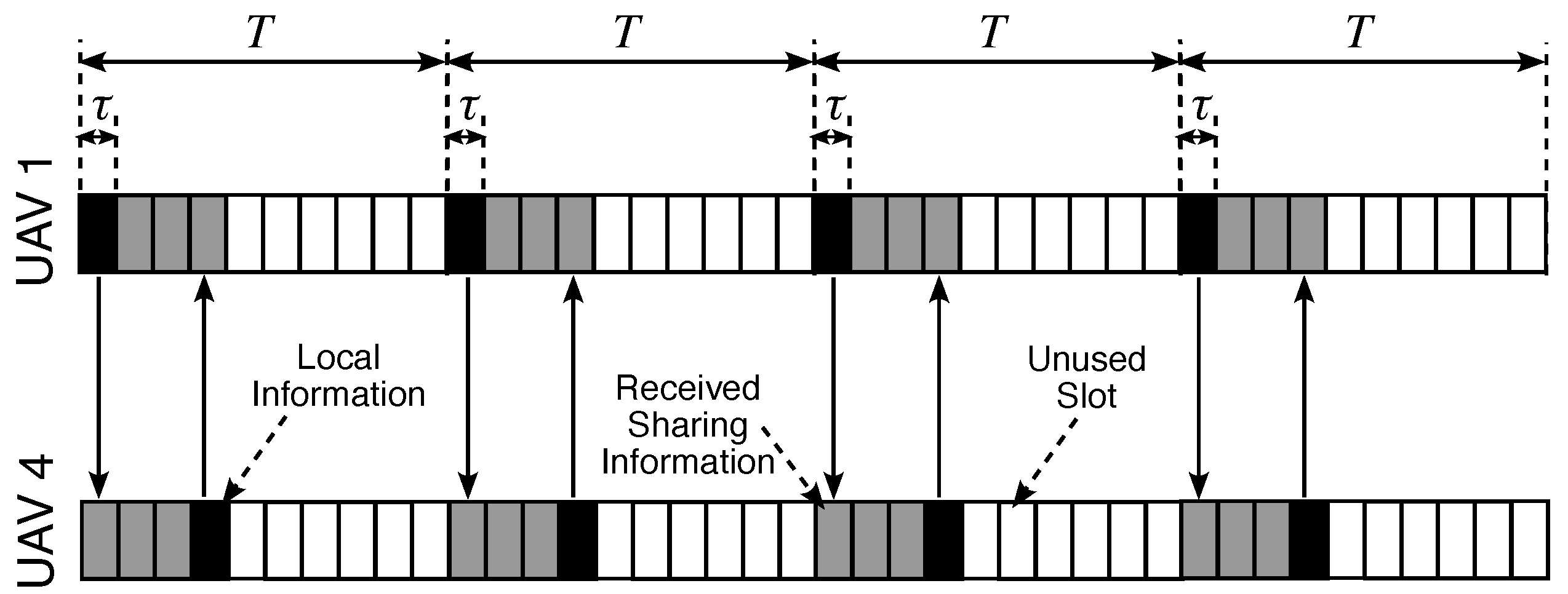
In the considered system, the local and shared information of the UAVs is transmitted and received using wireless transmission modules. In
Figure 5, we provide an illustration of the frame structure for the V2V communication protocol. To deal with interference issues, we adopt the time division multiple access (TDMA) method for the frame structure design. Specifically, we divide a frame equally into
N time slots
and let
.
occupies the time slot
to transmit its local information, including position, velocity, etc. Other time slots except
are not used by
during the flight process. As a result, each UAV shares its local information with a duration
, and interference among UAVs can be ignored under the assumption of no channel delay and perfect transmitting synchronization. Certainly, interference among slots generally occurs and results in packet loss, which reduces the reliability of information sharing among UAVs. Fortunately, in general cases, UAVs operate under good channel conditions, and the interference would not be a severe issue.
2.2. Flight Coordination Control Unit
For the flight coordination control unit, there are two main tasks: calculation and conversion tasks. The calculation task includes operating different algorithms and using data from the Drone Mapper device to calculate the basic parameters required for the UAV to perform its flight missions. The parameters include the flight speed, flight direction, destination coordinates, etc. The conversion task operates conversion of the data parameter output from the previous step into commands that can be recognized and executed by the UAV, and then these commands are sent to the flight controller. Different algorithms need to be designed and implemented for different flight missions in this unit. This is a highly creative and customized process.
In general, a multiple input–output (I/O) algorithm implemented in this unit can be mathematically expressed by
where
presents the designed algorithm performed by
for the flight operations, including but not limited to collision avoidance and flight formation.
for
denotes the received shared information sent from
to
, and includes longitude, latitude, etc. In the present systems,
can be further expressed by
where
and
t denote the identification and flight time.
x,
y, and
z are defined as the longitude, latitude, and altitude of the UAV.
v and
represent the flight speed relative to the ground and the flight direction.
r is the alert radius of the UAV. An example of the shared information format sent from the Drone Mapper device described in
Section 2.1 is listed in
Table 2. The output parameters
for
can be the UAV’s flight speed, flight direction, destination coordinates, etc. The number of algorithm outputs
M and definitions
are decided by flight missions for each UAV. Actually, the algorithm output
cannot be recognized and directly used by the UAVs. Hence, we implement a conversion function in the flight coordination control unit to translate
into commands that the UAV can recognize. A functional block diagram and a hardware photograph of the developed flight coordination control unit are shown in
Figure 6 and
Figure 7, respectively.
2.3. Flight Controller
The main task of the flight controller is to control the UAV according to the commands received from the flight coordination control unit. To implement this functionality, we use a product called Pixhawk2, which is an open-source flight control system designed for UAVs and other robotic systems. The flight controller operates an autopilot software stack and provides the ability to control various flight parameters of the UAV, such as altitude, speed, and direction. More details about the core of the flight controller can be found on the Pixhawk2 product website.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}