
Practically Robust Fixed-Time Convergent Sliding Mode Control for Underactuated Aerial Flexible JointRobots Manipulators



Abstract
:1. Introduction
- (i)
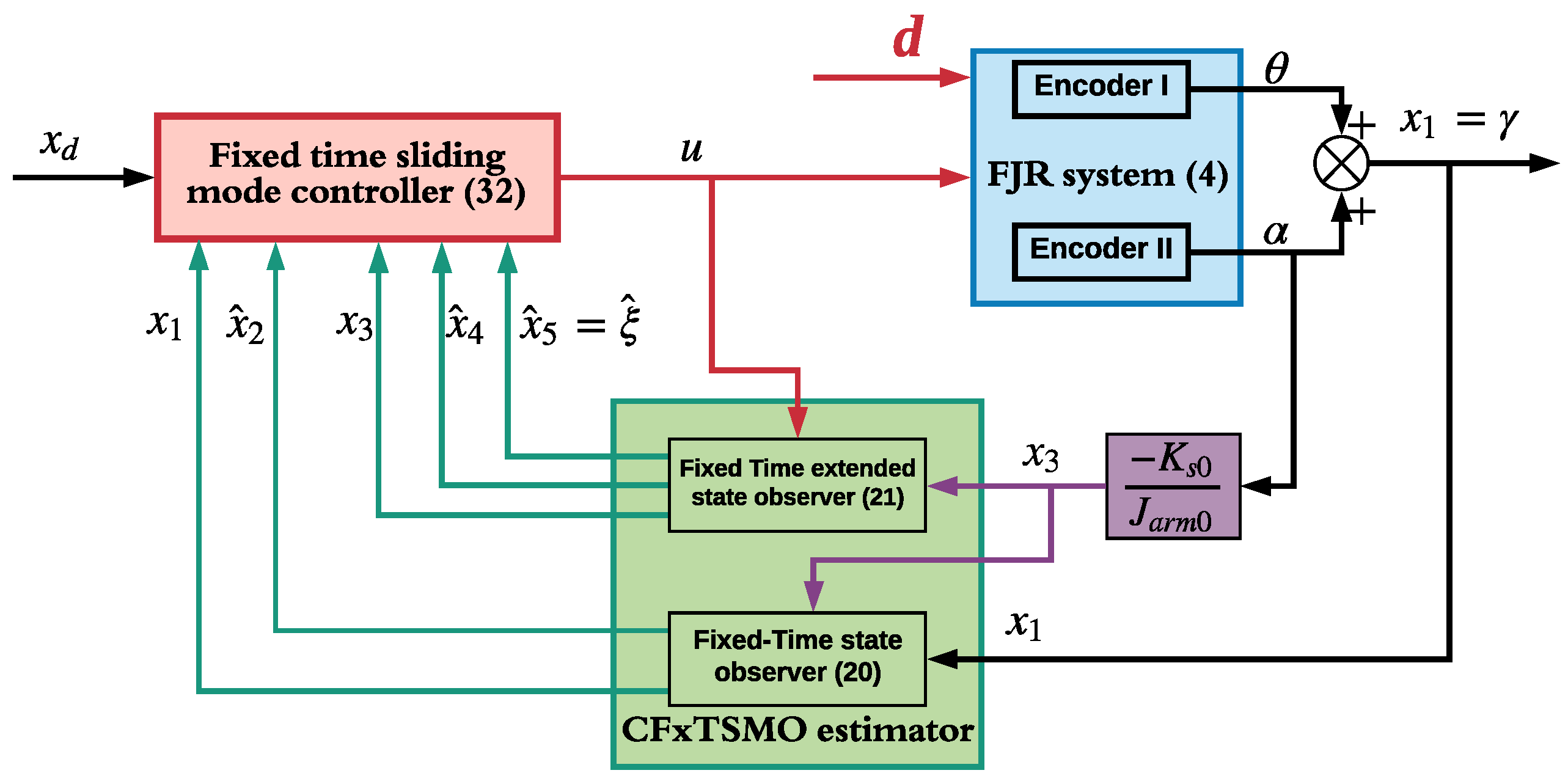
- The integrated dynamic modeling of the underactuated FJR system is well established, and the detailed analysis is also given. By using the Olfati and flatness transformation, the established FJR dynamic model is converted into a canonical representation, which then is cascaded due to two available states. Thus, the coupling issue in the control input of the underactuated FJR system is handled through these transformations. Accordingly, no linearization nor approximation are needed due to the fact that the FJR system in practice has inevitably complex nonlinearities caused by flexibility, friction, and other sources.
- (ii)
- The CFxTSMO is constructed based on the cascaded structure to greatly smooth out the measurement noise in the fixed-time estimates of unknown states and disturbances, which makes the FxTSMC scheme feasible for the real FJR system. Via the aid of such smooth estimations, a fixed-time sliding surface is newly designed to ensure a fixed-time convergence, which needs a partial knowledge of the estimation states, including the velocity and jerk signal, whereas a position and an acceleration signal can be measured.
- (iii)
- Unlike the existing finite-time convergent controller works [20,25] for fourth-order systems, the proposed FxTSMC controller for the FJR system with fourth-order practically guarantees not only fixed-time convergence, even in the presence of the initial conditions, but it also ensures a total robustness against disturbances and estimation error.
- (iv)
- The fixed-time stability of the whole closed-loop FJR plant is theoretically proven. Compared with some simulations works of fixed-time SMC schemes [26,27,28,29,30], the proposed control scheme is practically validated on the actual FJR system. Extensive simulations and persuasive experimental results are provided to show its tracking efficiency and robustness performance against disturbances and initial conditions. To the best of our knowledge, the proposed CFxTSMO-based FxTSMC scheme is reported here for the first time in the open literature for the FJR system and underactuated mechanical systems (UMSs). This study presents our controller as a good control candidate for other kinds of UMSs, including drone systems.
2. Dynamic Modeling
2.1. Description of the Single-Link FJR System
2.2. FJR Dynamic Modeling
2.3. State Transformation Procedure of the Underactuated FJR Manipulator
3. Compound Controller Design and Stability Proof
3.1. CFxTSMO Observer Design and Stability Analysis
- (1)
- Gains and of the FxTSO and FxTESO estimators, respectively, are selected asin which the disturbance is assumed to be uniformly bounded for all time by a positive number as . In addition, we postulate that the first derivative of the overall disturbance is bounded by , where is the known Lipschitz constant.
- (2)
- The exponents are small enough and the observer gains and for both estimators are chosen such that the following second- and third-order polynomials, respectively,are Hurwitz, and where and are the bandwidths of the second terms in both estimators.
- (3)
3.2. FxTSMC Design and Stability Analysis
- (1)
- Finite-Time Convergence of Sliding Function:
- (2)
- Fixed-Time Convergence of System Dynamics Tracking Errors (During the Sliding Motion):
4. Simulation and Experimental Results
4.1. Comparisons of Controllers for Validation
4.2. Simulation Results (Robustness Verification against Initial Conditions)
4.3. Introduction of the Experimental Setup
4.4. Experimental Results (Robustness Verification against FJR System Uncertainties)
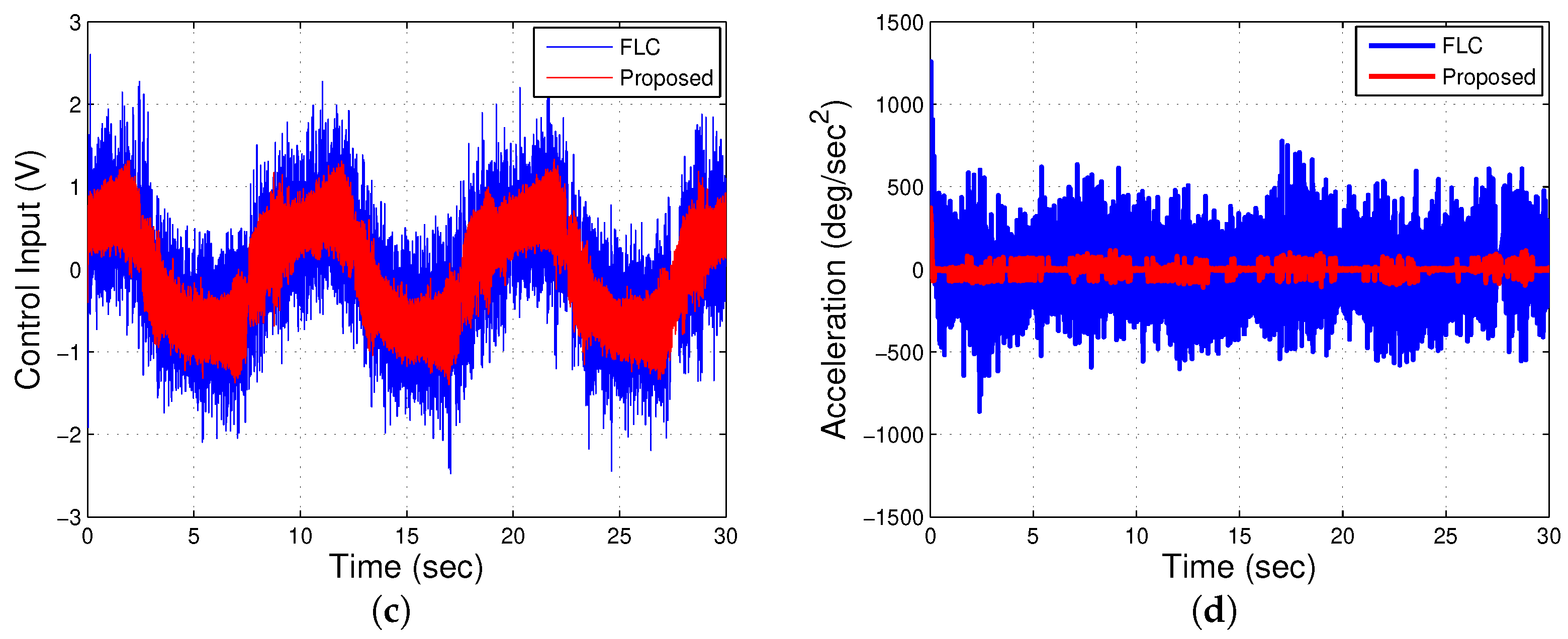
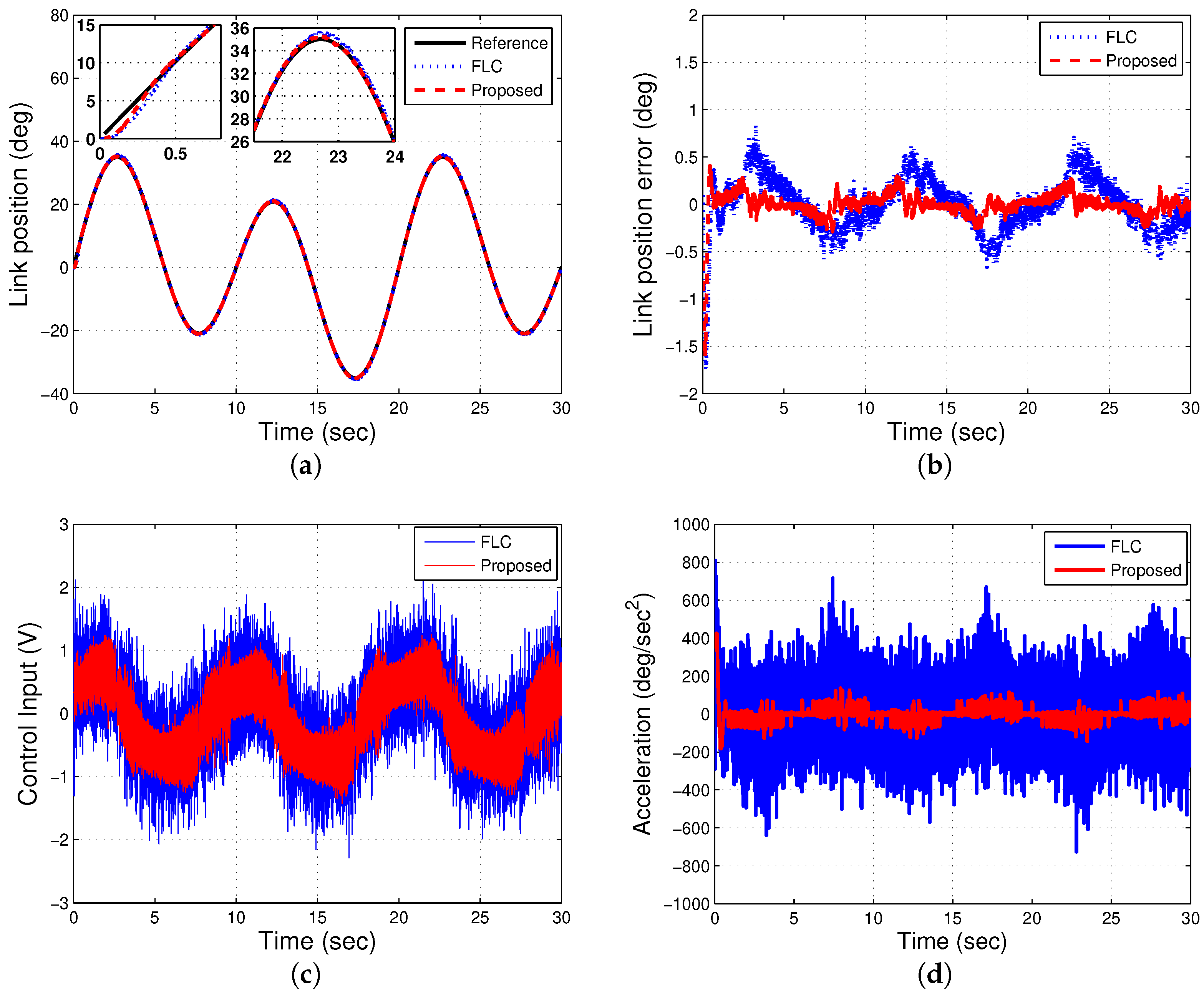
4.4.1. Sinewave Tracking Performance and Robustness (Tests 1 and 2)
4.4.2. Dual Sine Waveform Tracking Performance and Robustness (Tests 3 and 4)
4.4.3. Sudden Load Compensation Capability (Test 5)
4.5. Quantitative Comparison and Summary
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ham, R.V.; Sugar, T.; Vanderborght, B.; Hollander, K.; Lefeber, D. Compliant actuator designs. IEEE Robot Autom Mag. 2009, 3, 81–94. [Google Scholar] [CrossRef]
- Talole, S.E.; Kolhe, J.P.; Phadke, S.B. Extended-state-observer-based control of flexible-joint system with experimental validation. IEEE Trans. Ind. Electron. 2010, 57, 1411–1419. [Google Scholar] [CrossRef]
- Le-Tien, L.; Albu-Schäffer, A. Robust Adaptive Tracking Control Based on State Feedback Controller with Integrator Terms for Elastic Joint Robots with Uncertain Parameters. IEEE Trans. Control Syst. Technol. 2018, 26, 2259–2267. [Google Scholar] [CrossRef]
- Sun, W.; Su, S.F.; Xia, J.; Nguyen, V.T. Adaptive Fuzzy Tracking Control of Flexible-Joint Robots with Full-State Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2201–2209. [Google Scholar] [CrossRef]
- Yunda, Y.; Zhang, C.; Narayan, A.; Yang, J.; Li, S.; Yu, H. Generalized Dynamic Predictive Control for Non-Parametric Uncertain Systems with Application to Series Elastic Actuators. IEEE Trans. Ind. Informat. 2018, 14, 4829–4840. [Google Scholar]
- Pan, Y.; Wang, H.; Li, X.; Yu, H. Adaptive command-filtered backstepping control of robot arms with compliant actuators. IEEE Trans. Control Syst. Technol. 2018, 26, 1149–1156. [Google Scholar] [CrossRef]
- Ginoya, D.; Shendge, P.; Phadke, S. Disturbance observer based sliding mode control of nonlinear mismatched uncertain systems. Commun. Nonlinear Sci. Numer Simulat. 2015, 26, 98–107. [Google Scholar] [CrossRef]
- Kim, J. Two-Time Scale Control of Flexible Joint Robots with an Improved Slow Model. IEEE Trans. Ind. Electron. 2018, 65, 3317–3325. [Google Scholar] [CrossRef]
- Pan, Y.; Li, X.; Yu, H. Efficient PID Tracking Control of Robotic Manipulators Driven by Compliant Actuators. IEEE Trans. Control Syst. Technol. 2019, 27, 915–922. [Google Scholar] [CrossRef]
- Rsetam, K.; Cao, Z.; Man, Z.; Mitrevska, M. Optimal second order integral sliding mode control for a flexible joint robot manipulator. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 3069–3074. [Google Scholar]
- Rsetam, K.; Cao, Z.; Man, Z. Hierarchical non-singular terminal sliding mode controller for a single link flexible joint robot manipulator. In Proceedings of the 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 6677–6682. [Google Scholar]
- Kim, J.; Croft, E.A. Full-state tracking control for flexible joint robots with singular perturbation techniques. IEEE Trans. Control Syst. Technol. 2019, 27, 63–73. [Google Scholar] [CrossRef]
- Qin, Z.C.; Xiong, F.R.; Ding, Q.; Hernández, C.; Fernandez, J.; Schütze, O.; Sun, J.Q. Multi-objective optimal design of sliding mode control with parallel simple cell mapping method. J. Vib. Control 2017, 23, 46–54. [Google Scholar] [CrossRef]
- Ginoya, D.; Shendge, P.; Phadke, S. Sliding mode control for mismatched uncertain systems using an extended disturbance observer. IEEE Trans. Ind. Electron. 2014, 61, 1983–1992. [Google Scholar] [CrossRef]
- Wang, H.; Pan, Y.; Li, S.; Yu, H. Robust Sliding Mode Control for Robots Driven by Compliant Actuators. IEEE Trans. Control Syst. Technol. 2019, 27, 1259–1266. [Google Scholar] [CrossRef]
- Haninger, K.; Tomizuka, M. Robust Passivity and Passivity Relaxation for Impedance Control of Flexible-Joint Robots with Inner-Loop Torque Control. IEEE/ASME Trans. Mechatron. 2018, 23, 2671–2680. [Google Scholar] [CrossRef]
- Jin, H.; Liu, Z.; Zhang, H.; Liu, Y.; Zhao, J. A Dynamic Parameter Identification Method for Flexible Joints Based on Adaptive Control. IEEE/ASME Trans. Mechatron. 2018, 23, 2896–2908. [Google Scholar] [CrossRef]
- Yan, Z.; Lai, X.; Meng, Q.; Wu, M. A novel robust control method for motion control of uncertain single-link flexible-joint manipulator. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1671–1678. [Google Scholar] [CrossRef]
- Rsetam, K.; Cao, Z.; Man, Z. Design of Robust Terminal Sliding Mode Control for Underactuated Flexible Joint Robot. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 4272–4285. [Google Scholar] [CrossRef]
- Aghababa, M.P. Stabilization of canonical systems via adaptive chattering free sliding modes with no singularity problems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 1696–1703. [Google Scholar] [CrossRef]
- Rsetam, K.; Cao, Z.; Man, Z. Cascaded-extended-state-observer-based sliding-mode control for underactuated flexible joint robot. IEEE Trans. Ind. Electron. 2019, 67, 10822–10832. [Google Scholar] [CrossRef]
- Mishra, J.P.; Yu, X.; Jalili, M. Arbitrary-Order Continuous Finite-Time Sliding Mode Controller for Fixed-Time Convergence. IEEE Trans. Circuits Syst. II Exp. Briefs. 2018, 65, 1988–1992. [Google Scholar] [CrossRef]
- Song, J.; Hu, Y.; Su, J.; Zhao, M.; Ai, S. Fractional-Order Linear Active Disturbance Rejection Control Design and Optimization Based Improved Sparrow Search Algorithm for Quadrotor UAV with System Uncertainties and External Disturbance. Drones 2022, 6, 229. [Google Scholar] [CrossRef]
- Orozco Soto, S.M.; Cacace, J.; Ruggiero, F.; Lippiello, V. Active Disturbance Rejection Control for the Robust Flight of a Passively Tilted Hexarotor. Drones 2022, 6, 258. [Google Scholar] [CrossRef]
- Tian, B.; Lu, H.; Zuo, Z.; Zong, Q.; Zhang, Y. Multivariable finite-time output feedback trajectory tracking control of quadrotor helicopters. Int. J. Robust Nonlinear Control. 2018, 28, 281–295. [Google Scholar] [CrossRef]
- Basin, M.V.; Ramírez, P.C.R.; Guerra-Avellaneda, F. Continuous fixed-time controller design for mechatronic systems with incomplete measurements. IEEE/ASME Trans. Mechatron. 2017, 23, 57–67. [Google Scholar] [CrossRef]
- Tian, B.; Lu, H.; Zuo, Z.; Yang, W. Fixed-time leader–follower output feedback consensus for second-order multiagent systems. IEEE Trans. Cybern. 2018, 49, 1545–1550. [Google Scholar] [CrossRef] [PubMed]
- Basin, M.; Rodriguez-Ramirez, P.; Ding, S.X.; Daszenies, T.; Shtessel, Y. Continuous fixed-time convergent regulator for dynamic systems with unbounded disturbances. J. Frankl. Inst. 2018, 355, 2762–2778. [Google Scholar] [CrossRef]
- Zuo, Z.; Han, Q.L.; Ning, B. An Explicit Estimate for the Upper Bound of the Settling Time in Fixed-Time Leader-Following Consensus of High-Order Multivariable Multiagent Systems. IEEE Trans. Ind. Electron. 2018, 66, 6250–6259. [Google Scholar] [CrossRef]
- Basin, M.; Avellaneda, F.G. Continuous Fixed-Time Controller Design for Dynamic Systems with Unmeasurable States Subject to Unbounded Disturbances. Asian J. Control. 2019, 21, 194–207. [Google Scholar] [CrossRef] [Green Version]
- Olfati-Saber, R. Normal forms for underactuated mechanical systems with symmetry. IEEE Trans. Autom. Control. 2002, 47, 305–308. [Google Scholar] [CrossRef] [Green Version]
- Fliess, M.; Lévine, J.; Martin, P.; Rouchon, P. Flatness and defect of non-linear systems: Introductory theory and examples. Int. J. Control. 1995, 61, 1327–1361. [Google Scholar] [CrossRef] [Green Version]
- Angulo, M.T.; Moreno, J.A.; Fridman, L. Robust exact uniformly convergent arbitrary order differentiator. Automatica 2013, 49, 2489–2495. [Google Scholar] [CrossRef]
- Donaire, A.; Romero, J.G.; Ortega, R.; Siciliano, B.; Crespo, M. Robust IDA-PBC for underactuated mechanical systems subject to matched disturbances. Int. J. Robust Nonlinear Control. 2017, 27, 1000–1016. [Google Scholar] [CrossRef]
- Wu, X.; He, X. Nonlinear energy-based regulation control of three-dimensional overhead cranes. IEEE Trans. Autom. Sci. Eng. 2016, 14, 1297–1308. [Google Scholar] [CrossRef]
- Li, J.W. Robust Tracking Control and Stabilization of Underactuated Ships. Asian J. Control. 2018, 20, 2143–2153. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H.; Wu, Y.; Lu, B. Nonlinear antiswing control of offshore cranes with unknown parameters and persistent ship-induced perturbations: Theoretical design and hardware experiments. IEEE Trans. Ind. Electron. 2017, 65, 2629–2641. [Google Scholar] [CrossRef]
- Sun, N.; Yang, T.; Fang, Y.; Lu, B.; Qian, Y. Nonlinear motion control of underactuated three-dimensional boom cranes with hardware experiments. IEEE Trans. Ind. Electron. 2017, 14, 887–897. [Google Scholar] [CrossRef]
- Dai, S.L.; He, S.; Lin, H. Transverse function control with prescribed performance guarantees for underactuated marine surface vehicles. Int. J. Robust Nonlinear Control. 2019, 29, 1577–1596. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Zhang, Y.; Shi, B.; Jiang, D.; Peng, H. A unified symplectic pseudospectral method for motion planning and tracking control of 3D underactuated overhead cranes. Int. J. Robust Nonlinear Control. 2019, 29, 2236–2253. [Google Scholar] [CrossRef]
- Zhang, A.; She, J.; Qiu, J.; Yang, C.; Alsaadi, F. Design of motion trajectory and tracking control for underactuated cart-pendulum system. Int. J. Robust Nonlinear Control. 2019, 29, 2458–2470. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, N.; Fang, Y.; Liang, D. An increased nonlinear coupling motion controller for underactuated multi-TORA systems: Theoretical design and hardware experimentation. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 1186–1193. [Google Scholar] [CrossRef]
- Bingol, O.; Guzey, H.M. Finite-Time Neuro-Sliding-Mode Controller Design for Quadrotor UAVs Carrying Suspended Payload. Drones 2022, 6, 311. [Google Scholar] [CrossRef]
- Shen, Z.; Tsuchiya, T. Singular Zone in Quadrotor Yaw–Position Feedback Linearization. Drones 2022, 6, 84. [Google Scholar] [CrossRef]
- Zuo, Z.; Han, Q.L.; Ning, B.; Ge, X.; Zhang, X.M. An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Trans. Ind. Informat. 2018, 14, 2322–2334. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Test 1 | Test 2 | Test 3 | Test 4 |
|---|---|---|---|---|
| Proposed | 0.0709 | 0.1414 | 0.1115 | 0.1453 |
| FLC | 0.2878 | 0.3723 | 0.2835 | 0.3289 |
| Improvement (%) | 75.4 | 62 | 60.6 | 55.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rsetam, K.; Cao, Z.; Wang, L.; Al-Rawi, M.; Man, Z. Practically Robust Fixed-Time Convergent Sliding Mode Control for Underactuated Aerial Flexible JointRobots Manipulators. Drones 2022, 6, 428. https://doi.org/10.3390/drones6120428
Rsetam K, Cao Z, Wang L, Al-Rawi M, Man Z. Practically Robust Fixed-Time Convergent Sliding Mode Control for Underactuated Aerial Flexible JointRobots Manipulators. Drones. 2022; 6(12):428. https://doi.org/10.3390/drones6120428
Chicago/Turabian StyleRsetam, Kamal, Zhenwei Cao, Lulu Wang, Mohammad Al-Rawi, and Zhihong Man. 2022. "Practically Robust Fixed-Time Convergent Sliding Mode Control for Underactuated Aerial Flexible JointRobots Manipulators" Drones 6, no. 12: 428. https://doi.org/10.3390/drones6120428