1. Introduction
Path planning is a critical technology in the field of mobile robotics, enabling a mobile robot to efficiently navigate from its starting point to a designated target while circumventing obstacles within a given environment. It serves as a fundamental component of autonomous navigation and intelligent decision-making in mobile robot systems [
1,
2,
3]. Meanwhile, Car-Like Mobile Robots (CLMRs) play an important role in the fields of warehousing and logistics, inspection, and distribution, etc. [
4,
5,
6], and their chassis is equipped with a steering mechanism and suspension system [
7], which makes CLMRs have good load capacity, passability, and flexibility. CLMRs are commonly utilized in environments characterized by a combination of large-scale areas and narrow spaces. Examples include neighborhoods with narrow alleys, dynamic manufacturing plants, or wild landscapes with dense vegetation [
8,
9]. These types of scenes impose greater demands on the path planning capabilities of CLMRs, requiring them to efficiently and accurately plan smooth paths.
Recently, path planning methods have emerged as a highly prominent area of research, captivating the attention of scholars worldwide, and researchers have extensively explored and developed innovative techniques across a diverse range of scenarios and for various types of robots [
10,
11,
12]. In general, research on path planning usually focuses on two major aspects: the construction of the robot chassis model and the optimization of path planning methods. Fortunately, the fractional-order method is commonly used for modelling and optimization, which is a mathematical tool dealing with non-integer order calculus [
13,
14,
15,
16]. It extends the traditional integer order calculus by allowing derivatives or integrals of non-integer orders to exist in the model. Fractional-order methods have gained significant attention in capturing the behavior of complex nonlinear systems. These methods offer a more accurate representation of system dynamics by incorporating fractional-order differential equations, which enable the modelling of properties like nonlocal dependence and nonsmooth behavior, allowing fractional-order models to better fit the behavior of real systems and provide more accurate predictions and analyses [
17,
18,
19,
20]. Therefore, this paper aims to utilize the fractional-order approach to extend the conventional path planning method based on an integer-order model, to devise a path planning scheme that is not only smoother but also more efficient.
In terms of robot chassis model construction, it can usually be categorized into kinetic model and kinematic model construction [
21]. In path planning, kinematic model construction is widely used in mobile robot path planning because it is efficient and practical [
22], unless robots involving special loads or structures need to consider kinetic models [
23]. Traditional kinematic model construction assumes that the steering and drive mechanisms of the vehicle are rigid bodies and uses an integer order approach for model construction [
24]. This approach simplifies the modelling and computational process but also poses the problem that once the structure and parameters of the robot chassis have been determined, the angle constraints are fixed. However, for the kinematic modelling of a CLMR, the traditional approach is not applicable because CLMRs are usually equipped with shock-absorbing suspensions on the drive and steering mechanisms to enhance passability and stability [
7]. This leads to changes in the chassis structure when steering or crossing obstacles, which makes the angle constraints in the kinematic model time-varying. Only by more accurately describing the time-varying angle constraints can the CLMR’s ability to move in a narrow space be improved. The accurate description of time-varying systems using fractional-order methods offers a valuable opportunity to enhance the CLMR’s maneuverability in narrow spaces. In this regard, this paper aims to make a significant contribution by incorporating dynamic factors, such as chassis suspension, into the precise construction of the fractional-order kinematic model.
There are many different path planning methods available [
25], mainly including graph-search-based methods (e.g., A* algorithm [
26]), stochastic path planning methods (e.g., Rapidly-Exploring Random Tree, RRT [
27]), and optimization algorithms (e.g., Ant Colony Optimization, ACO [
28], and Genetic Algorithm, GA [
29]). The above path planning methods are usually used for global planning, but for dynamic obstacles, they are combined with local planning in practical applications, such as dynamic window approaches [
30]. Graph-search-based methods utilize a heuristic function to assess the priority of nodes within a graph, enabling the identification of an optimal path by traversing the nodes. This approach is known for its high search efficiency and accuracy, making it particularly suitable for small-scale path planning problems. Besides, stochastic path planning methods employ random sampling and tree expansion techniques to swiftly explore feasible paths and gradually approach the desired goal position. These methods excel in high-dimensional environments and complex terrains but are susceptible to planning failures in narrow scenarios. Alternatively, optimization algorithms iteratively search for either the global optimal solution or a near-optimal solution through an optimization process [
31]. These algorithms aim to find the most optimized path by iteratively refining the solution. With the advantages of a global search ability, complex scene adaptability and learning ability, ACO has a strong solving ability in path planning problems and is widely used in real-world scenarios [
10].
A lot of good research has been done to use ACOs in a better way, and usually, their efficiency and smoothing are the focus [
32]. The pheromone concentration settings and heuristic mechanisms of ACO are the classical means around the efficiency improvement aspect. Liu et al. propose an enhanced heuristic mechanism for Ant Colony Optimization (ACO) that incorporates adaptive pheromone concentration settings and a heuristic mechanism with directional judgments, which increases the purposefulness of planned paths and reduces turn times [
33]. However, ACO usually realizes real-time planning in a small search space, and its experimental scene is generally less than a 50 × 50 grid map for algorithm verification [
34], which still falls short of the demand for fine path planning in actual large-scale application scenarios. Path smoothing techniques commonly involve incorporating angle or path curvature constraints into the planning method and utilizing spline interpolation to refine the path. For instance, Ali et al. introduce a Markov decision process trajectory evaluation model that considers arc-length parameterization. This model effectively filters and reduces the sharpness of global paths, thereby enhancing path smoothness [
35]. Tight constraints on steering angle or path curvature for the sake of smoothing can limit the robot’s ability to move, especially in narrow spaces. Feng et al. put forward a path planning algorithm based on immune ACO and B-spline interpolation, which introduces a B-spline curve smoothing strategy based on the optimal solution to make the obtained path shorter and smoother [
36]. Nonetheless, in narrow environments, the paths derived using spline interpolation are not necessarily usable, and they may collide with obstacles. In light of large-scale and narrow environments, further investigation of existing ACO algorithms is warranted. To address this, the integration of fractional-order models in path planning holds promise due to their advantages, including flexible and accurate parameter optimization as well as faster convergence. This paper aims to leverage fractional-order models to enhance path planning efficiency and smoothness, which represents a key highlight of the research.
Overall, the path planning performance of CLMRs in large-scale and narrow environments is still limited by inaccurate kinematic models as well as inefficient, insecure, and unsmooth planning methods. To tackle the aforementioned challenges, this paper presents fractional-order enhanced path planning for CLMRs in narrow and large-scale environments, which combines the benefits of fractional-order modelling and optimization techniques to enhance both the kinematic modelling of CLMRs and the ACO algorithm, thereby improving the efficiency of path planning and achieving smoother paths compared to traditional integer-order-based methods. The key contributions of this paper can be summarized as follows:
- (1)
To enhance the accuracy of kinematic model construction for CLMRs equipped with suspension systems, an innovative fractional-order-based kinematic modelling method is proposed. This method takes into account the dynamic adjustment of angle constraints to address the issue caused by the time-varying position of the steering wheel’s virtual center due to suspension changes. By considering these constraints, the proposed method improves the kinematic capabilities of CLMRs, especially in limit steering states, which lays a solid foundation for subsequent efficient and smooth path planning.
- (2)
To address the issue of unsmooth and inefficient planning paths in narrow and large-scale scenes, an improved Ant Colony Optimization (ACO) based path planning method that incorporates fractional-order models is presented, which overcomes the limitations of traditional approaches by establishing a global multifactorial heuristic function, utilizing dynamic angle constraints in fractional-order-based kinematic modelling, incorporating adaptive pheromone adjustment rules, and adopting fractional-order descriptive state-transfer models. These enhancements enable the algorithm to quickly acquire smooth paths and mitigate the problem of the algorithm getting trapped in local optima in narrow spaces, ultimately enhancing the searching speed and success rate of the algorithm in large-scale scenes.
- (3)
Several experiments are conducted in narrow and large-size sceneries, and the effectiveness of the proposed path planning method is proved by comparison with advanced path planning methods.
The rest of this paper is organized as follows. In
Section 2, system modelling and problem formulation are described.
Section 3 gives the accurate fractional-order-based kinematic modeling of a CLMR. Then, improved ACO-based path planning using fractional-order models is introduced in
Section 4. Experimental results are provided in
Section 5, followed by the conclusions and future outlook in
Section 6.
3. Accurate Fractional-Order-Based Kinematic Modeling of CLMR
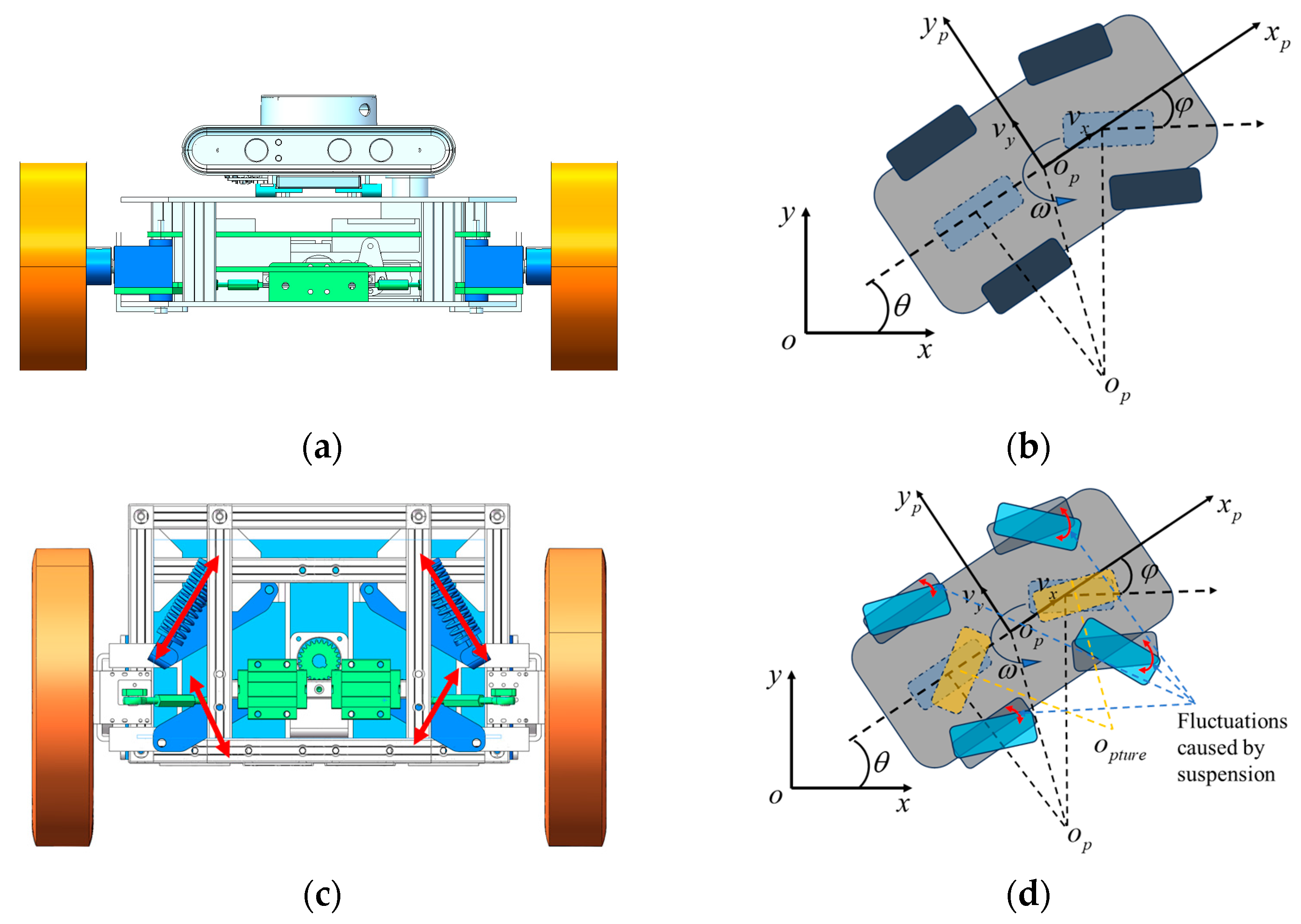
As illustrated in
Figure 1c,d, the CLMRs can dampen the vibration and improve the ability to cross the ditch by installing the suspension, which also leads to the unpredictability of the steering angle during the cornering process. Based on the parameters of the damping and hydraulic cylinders, the current steering angle constraints of the robot can be obtained, which provides the kinematic constraints for path acquisition. The path acquired in this way can satisfy the obstacle avoidance while improving the tracking accuracy. To simplify the calculation process, the steering wheel can be defined as a freewheel, i.e., the wheel can rotate freely around the axle. In the calculation process, a uniform local coordinate system is defined
, with the robot center point as the origin of the local coordinate system and the direction perpendicular to the front of the vehicle as the
x-axis. Then, the velocity of the virtual wheel in the global coordinate system is defined as:
where,
and
are the velocities of the virtual wheel in the global coordinate system in the
and
directions, respectively,
and
denote the coordinates of the virtual wheel in the local coordinate system in the
and
directions, respectively, and
and
are the velocity of the origin of the local coordinate system in the global coordinate system. Further, the acceleration expression can be obtained as:
According to [
37], it can be known that changes in the steering angle of the wheel system can cause dynamic torque distribution. In non-rigid suspension structures, torque fluctuation can cause wheel system displacement. From the torque distribution law, the deformation of the suspension near the inner side of the arc is greater than that on the outer side of the arc, resulting in a change of angle constraint. Fortunately, onboard sensors can accurately capture the current state information during the CLMR’s movement, allowing real-time constraint information to be calculated. Therefore, the variation of the virtual wheel direction angle
for the CLMR’s movement is calculated as:
Assuming that the posterior axis is fixed and parallel to the y-axis of the defined local coordinate system, there is no change in the point of the posterior axis. Consider that the velocity relation can be represented as:
therefore, it can be concluded that:
This leads to a general equation for the relationship between the CLMR’s attitude angle, velocity, and position, and a general constraint equation for the first-order derivatives. The relationship between the effects of velocity, attitude, and steering angle on path planning should be further clarified considering that the robot moves along a curve at different velocities. The running path (the planned path is obtained in the following section) is defined as:
Next, the slopes at the virtual wheels are calculated and the offset of the wheel system is taken into account. Conventional equations of kinematics do not correctly express the correctness of the system’s kinematic process, and fractional-order models offer the possibility of accurate system modelling. Therefore, we derive the trajectory equations and bring them into the above equation to obtain the following:
where
and
are predefined fractional-order operators.
The steering angle of the CLMR imposes a constraint on the maximum curvature of the planned path, considering the dynamic characteristics of the CLMR’s kinematics. However, directly calculating the curvature constraints proves challenging. From Equation (8),
can be obtained from onboard sensors. Therefore, calculating the real-time rate of
becomes the key to the solution. By combining Equations (11) and (12) we have the following:
and bringing Equation (7) into Equation (8), the corner constraint can be obtained as:
Considering the fluctuation of suspension in different environments, fractional-order-based kinematic modelling provides precise and dynamic angle constraints. This improves the success rate of path planning for a CLMR in narrow and difficult-to-pass scenarios.
From
Figure 1, the adjustment of the angular constraints mainly relies on the suspension adjustment of the wheel system in two degrees of freedom. However, through the change of the wheel system structure, the maximum constraint angle is also changed. At this point, the circular extension of the steering is not on the rear wheel system, which is of greater relevance to the planning of the path considering the mapping of the direction angle to the path. From Equation (8), it can be seen that the wheel system angle constraint varies with the change of the wheel system angle of rotation and the initial calibration position. For computational convenience, this paper focuses on the summation constraints of the virtual wheel system to improve computational and planning efficiency. With the calculation of the maximum constraint angle and the acquisition of the current steering angle from the sensing module, we can calculate the change in the maximum constraint angle.
4. Improved ACO Based Path Planning Using Fractional-Order Model
The traditional ACO usually uses the path length as the heuristic function term when solving the path planning problem; however, the environment faced during robot operation is more complex. Path planning, as a key module of mobile robot operation, plays a vital role in the safety and smoothness of robot operation. The pseudocode of the proposed ACO method is shown in Algorithm 1. In the algorithm, lines 1 to 3 are the initialization phase of the algorithm, which completes the initialization of the weight factors and pheromones. Lines 4 to 20 are the iterative part of the algorithm. Specifically, line 6 gives the initial position of the ant colony. Lines 8 to 16 are the ant colony search under the current iteration cycle, and the next moment position of the ant is obtained by transferring the probability model, recording the status of the ant colony, and determining the relationship with the target point. After the completion of the current iteration loop, the pheromone values
and path optimums
Lk for the scenario are updated. In Line 21, the optimal values for each loop are compared and the optimal path
Ln is selected.
| Algorithm 1 The pseudocode of the improved ACO. |
| 1 | /*Initialization*/ |
| 2 | Initialize the parameters, including |
| 3 | Calculate initialize pheromone matrix |
| 4 | /*main Loop*/ |
| 5 | While iteration number n does not arrive at the target do: |
| 6 | Place all ants at the start point; |
| 7 | /*inner loop*/ |
| 8 | For k = 1 to K do |
| 9 | Calculate the using Formula (25) and confirm the next node |
| 10 | If Ant k reach the target point do |
| 11 | Goto step 15 |
| 12 | Else |
| 13 | Goto step 9 |
| 14 | End if |
| 15 | Select the optimal ant path for this round according to Equation (15) |
| 16 | End for |
| 17 | Update the by Formulas (23)–(25) |
| 18 | n = n + 1, k = 0 |
| 19 | Select the optimal path Ln |
| 20 | End while |
| 21 | Return final optimal path Lk |
To obtain a safe and feasible path, the safety, smoothness, and path distance of the path need to be considered comprehensively, so the improved multi-factor heuristic function is as follows:
where
is the path planning heuristic function,
refers to the heuristic function that ensures the safe operation of the CLMR,
and
denote the weighting factors, respectively,
refers to the curvature smoothing factor,
is the modified path heuristic function, and
implies the standard path heuristic function, which is required by the planning method to obtain the minimum value of the cost function.
4.1. Factorization of the Cost Function with Fractional-Order Model
4.1.1. Safety Functions with Local Region Preprocessing
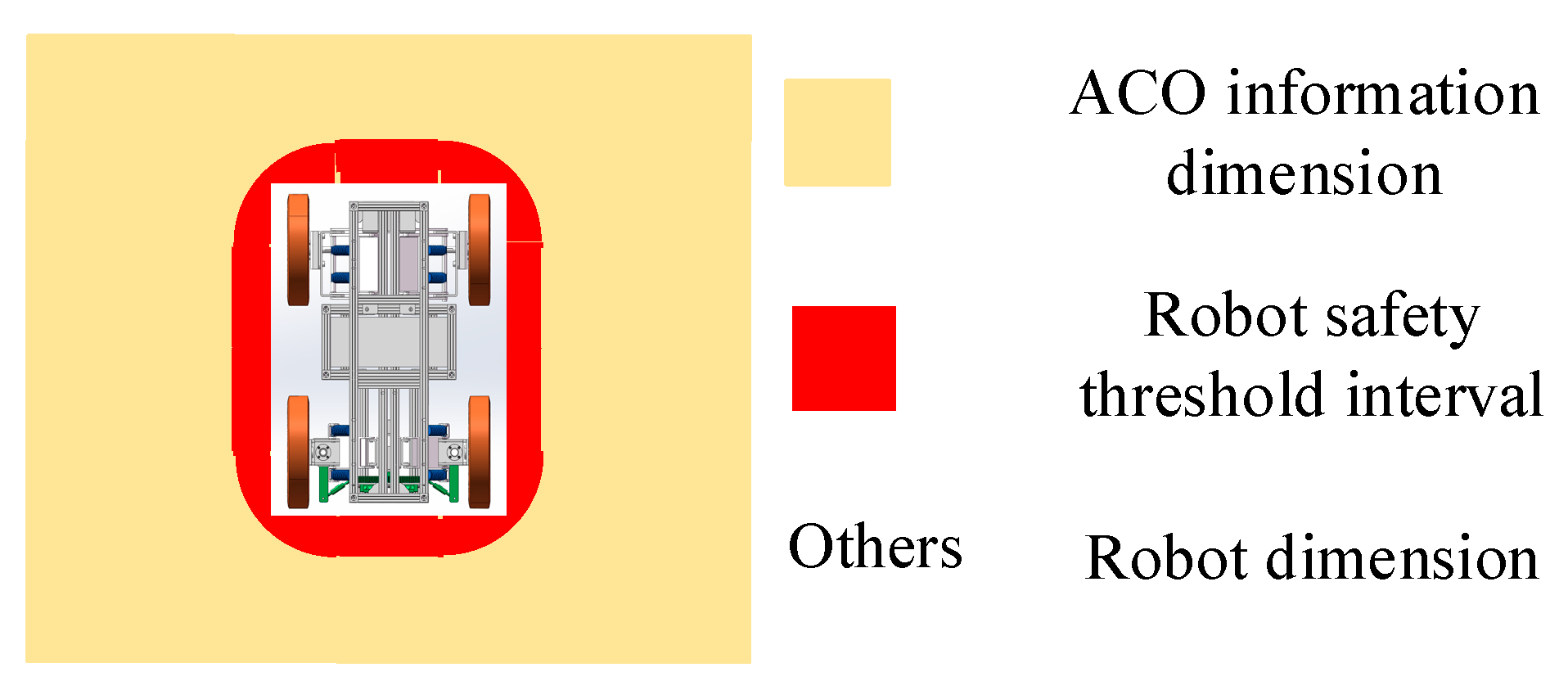
The operational safety of the mobile robot is the first factor to be considered for path planning. As shown in
Figure 2, considering the existence of tracking errors, the planning module needs to leave enough redundant space. To facilitate the process, a common approach is to uniformly inflate the static map with the CLMR’s radius; however, in large-scale or highly dynamic scenarios, the optimal or relatively optimal paths are difficult to obtain and the length of the planned paths increases dramatically. Treating robots as a fixed matrix reduces the passability of a CLMR and leads to lower search efficiency. For this reason, this paper proposes a safety factor function based on ACO storage information, defined as follows:
where
where
is the safety threshold constant,
denotes the intermediate function,
refers to the map expansion function,
implies the map information stored by the ACO in the map information,
is expressed as the information dimension matrix,
denotes the length of the map pixel point,
refers to the residual function,
is the searching direction raster labelling,
stands for the CLMR’s matrix under the CLMR’s coordinate system,
denotes the robot’s matrix dimensions,
is the coordinate system transfer matrix, and
refers to the robot direction angle in global coordinates.
4.1.2. Smoothing Function Based on Dynamic Angle Constraints
The ACO iterates towards the final heuristic function during the planning process, while the smoothness and feasibility of the paths are not given much attention. However, the angle constraints of the robot impose new requirements on the planning of paths, while excessive corners reduce the feasibility of paths. Improving the smoothness of the path and eliminating excessive corners will help reduce the travelling time and improve the smoothness of the path. To address these issues, considering the dynamic characteristics of the dynamic angle constraints in fractional-order-based kinematic modelling, a dynamic smoothing factor is introduced to reduce the integrated angle probability and improve the comprehensive performance of the algorithm, and the corner smoothing function is:
where
denotes the computed wheel system corner constraint,
is the planning corner at point
to point
,
denotes the path angle adjustment factor,
represents the robot straight travelling function,
stands for the maximum number of iterations, and
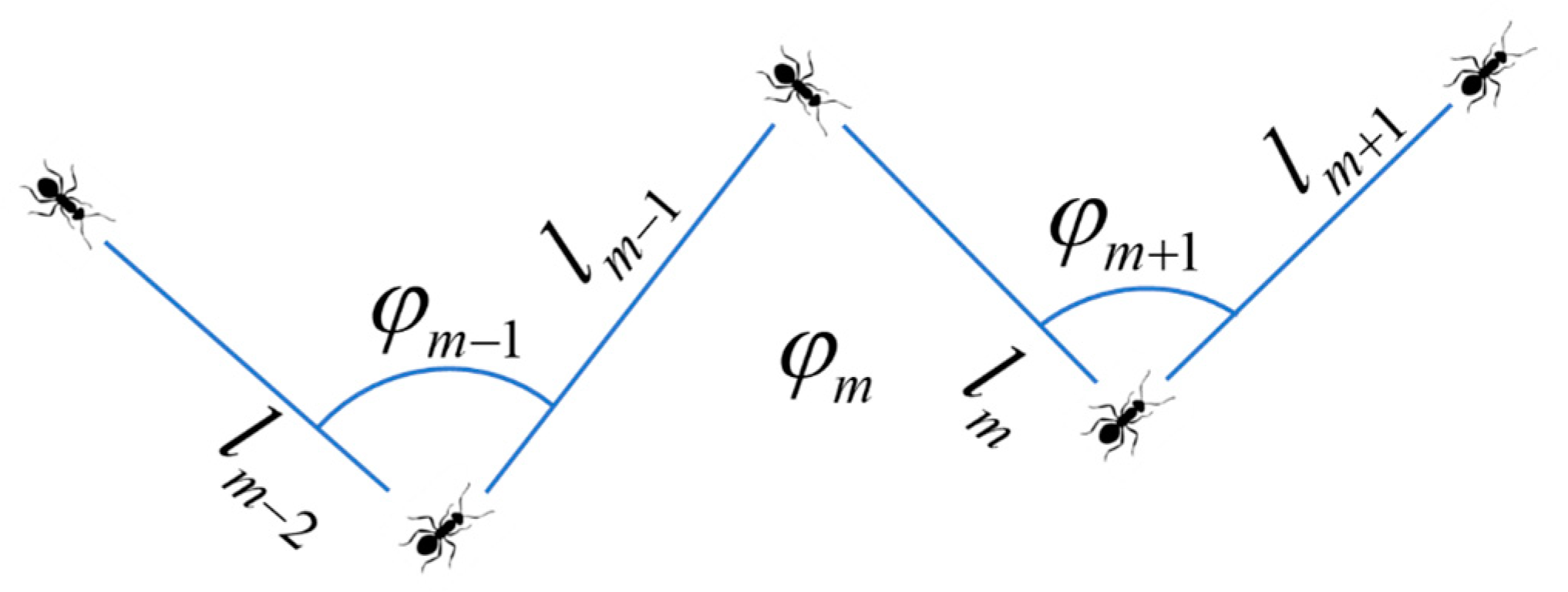
refers to the current number of iterations. Further, as shown in
Figure 3, the robot straight line function is expressed as:
where
,
,
and
are the four consecutive trajectories planned by the colony at the current point, and
and
represent the three consecutive corners consisting of these four trajectories.
The feasibility of the path is improved by the smoothing function with angle constraints. In the function, the smoothing factor of the angle is added to ensure the smoothness of the planned path, which is more favorable to the operation of the CLMR.
4.1.3. Path Functions by Adding Adjusting Factor
In actual operation, the length of the path is still an important factor to be considered, which is closely related to the CLMR’s work efficiency and energy utilization. For the traditional ACO, at the beginning of the iteration, the very small distance difference easily causes search confusion. At the late stage of convergence, there is a certain probability of falling into a local minimum. For this reason, we need to amplify the very small factor of fluctuation in the early stage in the distance factor to accelerate the convergence speed. In the later stages of iteration, we need to reduce the influence brought by the path, so that the path obtained is comprehensively optimal. The modified path factor function is:
where
is the path coefficient,
denotes the longest path from the current point
to the target point
planned by the ACO,
denotes the shortest path from the current point
to the target point
, and
refers to the Euclidean distance from the current point
to the target point
.
4.2. Adaptive Pheromone Update Rules
Traditional ACO algorithms are usually set to a constant C in the initial stage, which leads to a blind search mainly relying on the heuristic function at the initial stage, and it is very easily falls into a local minimum in large scene maps. To solve this problem and improve the search efficiency, the initial pheromone is redistributed in the initial stage of the map with the help of the convergence method of the initial A* algorithm to speed up the subsequent path replanning in large scenes. The initial pheromone is recorded as:
In the actual operation of the CLMR, path planning is influenced by multiple factors, and the goal is to find an optimal path that considers all of these conditions collectively. Currently, efforts are focused on improving the amount of pheromone changes at different points along the path. The specific follow-up rules are as follows:
where
is the dynamic volatilization factor of pheromone,
denotes the pheromone matrix at the current moment,
represents the pheromone concentration,
and
refer to the conditioning factors,
implies the mean squared deviation value of the walking angle, and
denotes the cumulative path length from the starting point to the target point.
The iterative values of are also dynamically adjusted through the changes of angle and distance values . By setting the magnitude of the values of weight coefficients and , the acquisition of effective paths that are more compatible with the scene is facilitated.
The dynamic pheromone volatilization factor is designed as:
where
and
are self-defined constants, and
can be adjusted adaptively with the search.
From Equation (24), it can be seen that the pheromone volatilization function reaches the maximum value in the pre-search period of the ACO which is in the period of the fastest change of the pheromone volatilization value. This increases the uncertainty factor in the early stage of the algorithm during the optimization process, which is more conducive to obtaining the globally optimal feasible solution. As the number of iterations increases, the pheromone volatility function tends to stabilize, and the local search process is more frequent, which helps to improve the quality of the path. Therefore, the iterative process accomplishes the adaptive regulation of pheromone concentration, which facilitates the realization of rapid path planning and optimization.
4.3. Fractional-Order Transfer Probability Rules
To obtain the feasible path faster and ensure the quality of the path, this paper improves the transfer probability of the algorithm. It makes the target probability increase the angle factor and distance factor. It is expected to obtain the shortest path under the premise of ensuring a smooth path. The improved state transfer probability is:
where
,
, and
denote the heuristic term factor, respectively, and
and
are defined as follows:
The fractional reciprocal of the angle factor and the distance factor is calculated to improve the sensitivity of the transition probability to its change, to ensure the timeliness of the path change and to improve the passability of the path.
A fractional-order state-transfer model can more accurately adjust the exploration probability of ant colonies in unexplored areas, which is beneficial for ant colony algorithms to jump out of the current local optimal solution and search for the global optimal solution with a greater probability, thereby improving the success rate of the search in large-scale scenarios. At the same time, due to the high dependence of the pheromone concentration on the optimal path, the modification of the transfer model increases the search breadth and the search probability of the optimal path, avoiding the acquisition of the optimal path, accelerating the search process around the optimal path, and thus improving the convergence speed.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}