

Design Optimization of Improved Fractional-Order Cascaded Frequency Controllers for Electric Vehicles and Electrical Power Grids Utilizing Renewable Energy Sources
 , , ,
, , , 
Abstract
:1. Introduction
Paper Contribution
- 1.
- An improved controller and design optimization method is proposed for frequency regulation in interconnected electrical power grids with high participation levels of RESs in addition to active participation of EVs in regulating frequency. The proposed controller and design methodology can effectively lead to mitigating various existing frequency fluctuations in electrical power grids. The proposed method can be generalized and applied to various electrical power grid systems and components.
- 2.
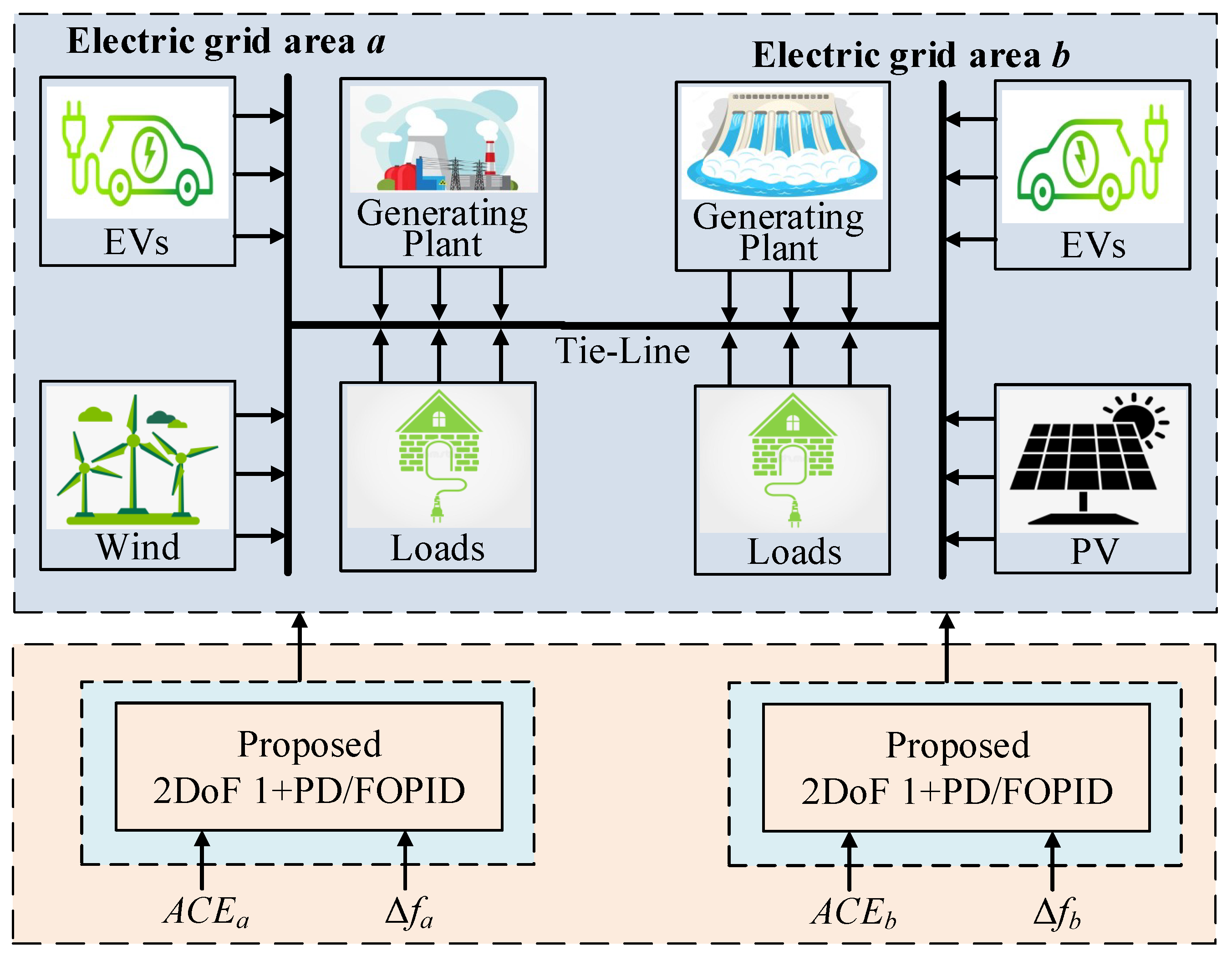
- The proposed frequency regulation control methodology is formed using a cascaded 2DoF 1 + PD/FOPID control method, which utilizes two input signals (namely the frequency deviation in each area, and control error in each area (ACE)). The utilization of two different signals is beneficial for the mitigation process of low- and high-frequency existing disturbances.
- 3.
- The proposed frequency regulation methodology using a 2DoF 1 + PD/FOPID controller provides better frequency regulation responses compared with the widely utilized PID, FOPID, and PD/FOPID LFCs, providing better disturbances rejections capabilities. The proposed 2DoF 1 + PD/FOPID structure is capable of mitigating various deviations in area frequency and electrical power grid tie-line power as a direct result of employing two cascaded loops with frequency and ACE signals.
- 4.
- Benefiting from EVs’ batteries in the effective participation in frequency regulation is coordinated through the proposed 2DoF 1 + PD/FOPID structure. Therefore, the proposed 2DoF 1 + PD/FOPID structure reduces the frequency regulation complexities due to employing the centralized frequency regulation structure that coordinates the connected EVs’ batteries and LFC regulator.
- 5.
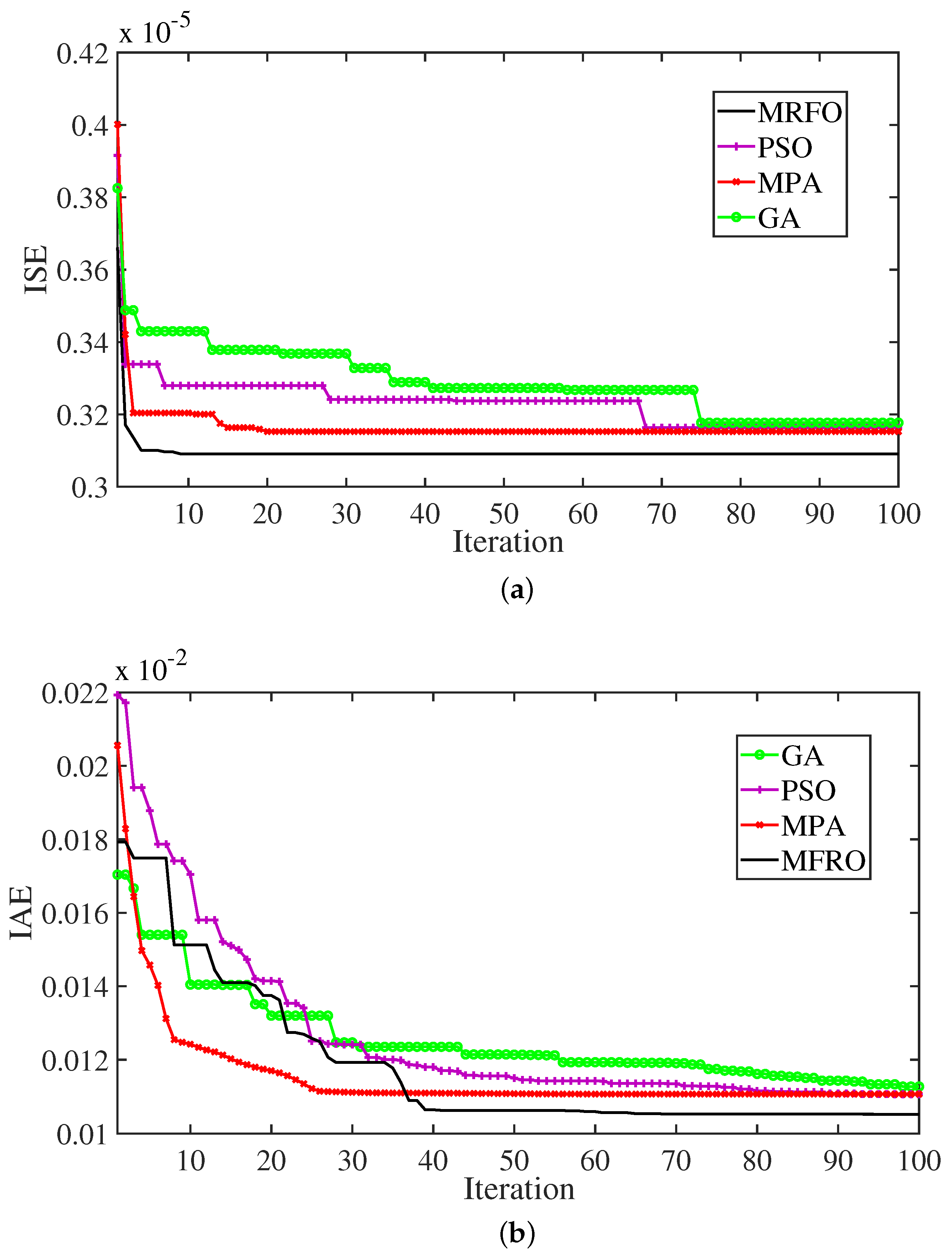
- An improved design optimization methodology using the recent manta ray foraging optimization (MRFO) to determine the best parameters for the proposed 2DoF 1 + PD/FOPID frequency regulation. The optimized values of LFCs in different electrical power grids are simultaneously searched using the MRFO optimizer, thus minimizing the desired objectives.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Category | Control Schemes | Characteristics |
|---|---|---|---|
| [16,17,18,19,20,22] | Conventional IO LFC (single input) | I, PI, PID, PIDF |
|
| [22,39,40,42,43] | Conventional FO LFC (single input) | FOPI, FOPID, FOPIDF |
|
| [24,25,27,28,29,30,32,33] | Cascaded IO LFC (multiple inputs) | PD-PI, PI-PDF, 2DoF-PID, PD-PID, PI-(1 + DD), IPD-(1 + I), FLC-PID |
|
| [44,45,46,47,48,49,51,52] | Cascaded FO LFC (multiple inputs) | Cascaded FOPID, 3DOF TID-FOPID, FOID-FOPIDF, FO-IDF, PI-TDF, ID-T, FOPD-PI |
|
| Proposed | Proposed cascaded FO LFC (multiple inputs) | Proposed cascaded 2DoF 1 + PD/FOPID LFC method |
|
2. Modelling of Interconnected Electrical Power Grids
2.1. Electrical Power Grid Description
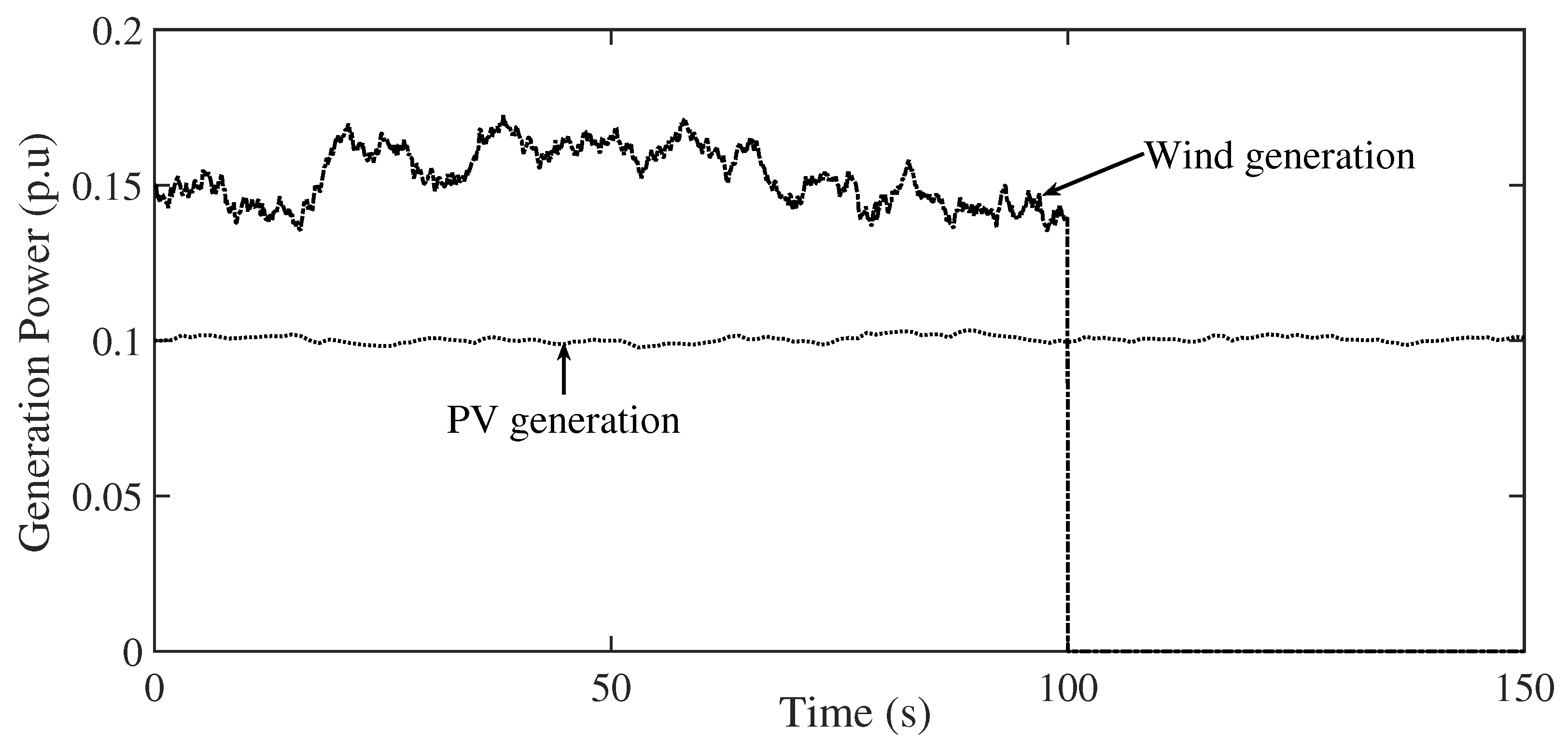
2.2. RES Behaviour Models
2.3. EV Behaviour Model
2.4. System State Space Model
| Symbols | Value | |
|---|---|---|
| Area a | Area b | |
| (MW) | 1200 | 1200 |
| (Hz/MW) | 2.4 | 2.4 |
| (MW/Hz) | 0.4249 | 0.4249 |
| Valve min. limit (p.u.MW) | −0.5 | −0.5 |
| Valve max. limit (p.u.MW) | 0.5 | 0.5 |
| (s) | 0.08 | - |
| (s) | 0.3 | - |
| (s) | - | 41.6 |
| (s) | - | 0.513 |
| (s) | - | 5 |
| (s) | - | 1 |
| (p.u.s) | 0.0833 | 0.0833 |
| (p.u./Hz) | 0.00833 | 0.00833 |
| (s) | - | 1.3 |
| (s) | - | 1 |
| (s) | 1.5 | - |
| (s) | 1 | - |
| EVs Modelling | ||
| Penetration level | 5–10% | 5–10% |
| (V) | 364.8 | 364.8 |
| (Ah) | 66.2 | 66.2 |
| (ohms) | 0.074 | 0.074 |
| (ohms) | 0.047 | 0.047 |
| (farad) | 703.6 | 703.6 |
| 0.02612 | 0.02612 | |
| Minimum EVs SOC % | 10 | 10 |
| Maximum EVs SOC % | 95 | 95 |
| Minimum capacity EVs limit (p.u.MW) | −0.1 | −0.1 |
| Maximum capacity EVs limit (p.u.MW) | +0.1 | +0.1 |
| (kWh) | 24.15 | 24.15 |

3. The Proposed 2Dof 1 + PD/FOPID Frequency Regulation
3.1. FO-Based Frequency Regulator Representation
3.2. Controllers from the Literature
3.3. Proposed 1 + PD/FOPID Controllers

4. The Proposed Design Optimization
4.1. MRFO Optimizer
4.2. Design Optimization
5. Simulation Results and Performance Verification
- Scenario (1): Impacts of the stepped load perturbations (SLP);
- Scenario (2): Impacts of multiple SLPs on the two interconnected electrical power grids;
- Scenario (3): Impacts of multiple connection/disconnection of RESs;
- Scenario (4): Impacts of randomly varying loads;
- Scenario (5): Joint impacts of RES fluctuations with various load-type variations.
| Controller | Area | Parameters | ||||||
|---|---|---|---|---|---|---|---|---|
| PID | Area a | 1.9062 | ― | 1.8547 | 1.8637 | ― | ― | ― |
| Area b | 0.8808 | ― | 0.2823 | 0.4233 | ― | ― | ― | |
| FOPID | Area a | 1.8184 | ― | 1.567 | 0.9969 | ― | 0.83 | 0.56 |
| Area b | 1.9809 | ― | 1.189 | 1.9497 | ― | 0.89 | 0.73 | |
| PD/FOPID | Area a | 4.3749 | 4.9837 | 1.9231 | 3.1152 | 1.6403 | 0.91 | 0.76 |
| Area b | 2.5839 | 4.7702 | 0.9544 | 0.7011 | 3.3158 | 0.62 | 0.93 | |
| 1 + PD/FOPID | Area a | 4.5281 | 3.2751 | 3.4007 | 4.2212 | 4.9497 | 0.97 | 0.82 |
| Area b | 3.7113 | 0.6361 | 1.6341 | 4.3158 | 2.9466 | 0.77 | 0.91 | |


5.1. Results of Scenario (1)
5.2. Results of Scenario (2)
5.3. Results at Scenario (3)
5.4. Results at Scenario (4)
5.5. Results at Scenario (5)
| Scenario | Controller | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PO | PU | ST (s) | PO | PU | ST (s) | PO | PU | ST (s) | ||
| No. 1 at 0 s | PID | 0.0008 | 0.0101 | 13 | 0.0011 | 0.0071 | 9 | 0.0006 | 0.0027 | 19 |
| FOPID | 0.0015 | 0.0061 | 11 | 0.0014 | 0.0023 | 11 | 0.0001 | 0.0023 | 16 | |
| PD/FOPID | 0.0002 | 0.0044 | 8 | - | 0.0016 | 10 | 0.0004 | 0.0014 | 10 | |
| 1 + PD/FOPID | 0.0001 | 0.0018 | 4 | - | 0.0002 | 3 | - | 3 | ||
| No. 2 at 30 s | PID | 0.0003 | 0.0078 | >20 s | 0.0005 | 0.0103 | >20 s | 0.0035 | 0.0001 | >20 s |
| FOPID | 0.0006 | 0.0051 | 19 | 0.0006 | 0.0081 | >20 s | 0.0031 | 0.0009 | >20 s | |
| PD/FOPID | - | 0.0037 | 22 | 0.0012 | 0.0058 | 19 | 0.0029 | 0.0005 | 20 | |
| 1 + PD/FOPID | - | 0.0005 | 7 | - | 0.0011 | 5 | 0.0003 | - | 6 | |
| No. 3 at 30 s | PID | 0.1202 | 0.0111 | FU | 0.0739 | 0.0209 | FU | 0.0264 | 0.0039 | FU |
| FOPID | 0.0596 | 0.0155 | FU | 0.0236 | 0.0132 | FU | 0.0243 | 0.0058 | FU | |
| PD/FOPID | 0.0456 | 0.0174 | 13 | 0.0205 | 0.0043 | 11 | 0.0194 | 0.0012 | FU | |
| 1 + PD/FOPID | 0.0085 | 0.0021 | 7 | 0.0031 | - | 5 | 0.0015 | - | 5 | |
| No. 4 | PID | 0.0569 | 0.0534 | FU | 0.0537 | 0.0608 | FU | 0.0179 | 0.0192 | FU |
| FOPID | 0.0239 | 0.0272 | FU | 0.0219 | 0.0209 | FU | 0.0139 | 0.0124 | FU | |
| PD/FOPID | 0.0094 | 0.0088 | FU | 0.0076 | 0.0092 | FU | 0.0094 | 0.0089 | FU | |
| 1 + PD/FOPID | 0.0017 | 0.0015 | FU | 0.0012 | 0.0013 | FU | 0.0007 | 0.0006 | FU | |
| No. 5 at 0 s | PID | 0.0927 | 0.0073 | FU | 0.1463 | 0.0127 | FU | 0.0077 | 0.0461 | FU |
| FOPID | 0.0527 | 0.0004 | FU | 0.0879 | 0.0092 | FU | 0.0019 | 0.0285 | FU | |
| PD/FOPID | 0.0471 | 0.0141 | FU | 0.0711 | 0.0065 | FU | 0.0022 | 0.0221 | FU | |
| 1 + PD/FOPID | 0.0334 | - | 15 | 0.0191 | - | 19 | - | 0.0026 | 23 | |
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1
Appendix A.2
Appendix A.3
References
- Blaabjerg, F.; Yang, Y.; Kim, K.A.; Rodriguez, J. Power Electronics Technology for Large-Scale Renewable Energy Generation. Proc. IEEE 2023, 111, 335–355. [Google Scholar] [CrossRef]
- Biswas, S.; Mahata, S.; Roy, P.K.; Chatterjee, K. Application of Empirical Bode Analysis for Delay-Margin Evaluation of Fractional-Order PI Controller in a Renewable Distributed Hybrid System. Fractal Fract. 2023, 7, 119. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Khan, L.; Al-Durra, A.; Ro, J.S. Integer and Fractional-Order Sliding Mode Control Schemes in Wind Energy Conversion Systems: Comprehensive Review, Comparison, and Technical Insight. Fractal Fract. 2022, 6, 447. [Google Scholar] [CrossRef]
- Salama, H.S.; Said, S.M.; Aly, M.; Vokony, I.; Hartmann, B. Studying Impacts of Electric Vehicle Functionalities in Wind Energy-Powered Utility Grids With Energy Storage Device. IEEE Access 2021, 9, 45754–45769. [Google Scholar] [CrossRef]
- Alilou, M.; Azami, H.; Oshnoei, A.; Mohammadi-Ivatloo, B.; Teodorescu, R. Fractional-Order Control Techniques for Renewable Energy and Energy-Storage-Integrated Power Systems: A Review. Fractal Fract. 2023, 7, 391. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Basit, A.; Aslam, S.; Zhang, G. Modified FOPID Controller for Frequency Regulation of a Hybrid Interconnected System of Conventional and Renewable Energy Sources. Fractal Fract. 2023, 7, 89. [Google Scholar] [CrossRef]
- Fayek, H.H. 5G Poor and Rich Novel Control Scheme Based Load Frequency Regulation of a Two-Area System with 100% Renewables in Africa. Fractal Fract. 2020, 5, 2. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Selim, A.; Aly, M.; Alsadi, A.; Alhosaini, W.; Alnuman, H.; Ramadan, H.A. Improving load frequency control performance in interconnected power systems with a new optimal high degree of freedom cascaded FOTPID-TIDF controller. Ain Shams Eng. J. 2023, 14, 102207. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Aly, M.; Elmelegi, A.; Ahmed, E.M.; Watanabe, M.; Said, S.M. Enhancement the Frequency Stability and Protection of Interconnected Microgrid Systems Using Advanced Hybrid Fractional Order Controller. IEEE Access 2022, 10, 111936–111961. [Google Scholar] [CrossRef]
- Kavikumar, R.; Kwon, O.M.; Lee, S.H.; Sakthivel, R. Input-output finite-time IT2 fuzzy dynamic sliding mode control for fractional-order nonlinear systems. Nonlinear Dyn. 2022, 108, 3745–3760. [Google Scholar] [CrossRef]
- Kavikumar, R.; Sakthivel, R.; Kwon, O.M.; Selvaraj, P. Robust tracking control design for fractional-order interval type-2 fuzzy systems. Nonlinear Dyn. 2022, 107, 3611–3628. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H.; Dragicevic, T. The Future 5G Network-Based Secondary Load Frequency Control in Shipboard Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 836–844. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Karimaghaie, P.; Boudjadar, J.; Khooban, M.H. Real-Time Cellular Wireless Sensor Testbed for Frequency Regulation in Smart Grids. IEEE Sens. J. 2019, 19, 11656–11665. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Selim, A.; Alnuman, H.; Alhosaini, W.; Aly, M.; Mohamed, E.A. Modified Frequency Regulator Based on TIλ-TDμFF Controller for Interconnected Microgrids with Incorporating Hybrid Renewable Energy Sources. Mathematics 2022, 11, 28. [Google Scholar] [CrossRef]
- Aly, M.; Mohamed, E.A.; Noman, A.M.; Ahmed, E.M.; El-Sousy, F.F.M.; Watanabe, M. Optimized Non-Integer Load Frequency Control Scheme for Interconnected Microgrids in Remote Areas with High Renewable Energy and Electric Vehicle Penetrations. Mathematics 2023, 11, 2080. [Google Scholar] [CrossRef]
- Dahab, Y.A.; Abubakr, H.; Mohamed, T.H. Adaptive Load Frequency Control of Power Systems Using Electro-Search Optimization Supported by the Balloon Effect. IEEE Access 2020, 8, 7408–7422. [Google Scholar] [CrossRef]
- Ewais, A.M.; Elnoby, A.M.; Mohamed, T.H.; Mahmoud, M.M.; Qudaih, Y.; Hassan, A.M. Adaptive frequency control in smart microgrid using controlled loads supported by real-time implementation. PLoS ONE 2023, 18, e0283561. [Google Scholar] [CrossRef]
- Arora, K.; Kumar, A.; Kamboj, V.K.; Prashar, D.; Shrestha, B.; Joshi, G.P. Impact of Renewable Energy Sources into Multi Area Multi-Source Load Frequency Control of Interrelated Power System. Mathematics 2021, 9, 186. [Google Scholar] [CrossRef]
- Gupta, D.K.; Soni, A.K.; Jha, A.V.; Mishra, S.K.; Appasani, B.; Srinivasulu, A.; Bizon, N.; Thounthong, P. Hybrid Gravitational–Firefly Algorithm-Based Load Frequency Control for Hydrothermal Two-Area System. Mathematics 2021, 9, 712. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Fathy, A. Recent methodology based Harris Hawks optimizer for designing load frequency control incorporated in multi-interconnected renewable energy plants. Sustain. Energy Grids Netw. 2020, 22, 100352. [Google Scholar] [CrossRef]
- Salama, H.S.; Magdy, G.; Bakeer, A.; Vokony, I. Adaptive coordination control strategy of renewable energy sources, hydrogen production unit, and fuel cell for frequency regulation of a hybrid distributed power system. Prot. Control Mod. Power Syst. 2022, 7, 34. [Google Scholar] [CrossRef]
- Shabani, H.; Vahidi, B.; Ebrahimpour, M. A robust PID controller based on imperialist competitive algorithm for load-frequency control of power systems. ISA Trans. 2013, 52, 88–95. [Google Scholar] [CrossRef] [PubMed]
- Youssef, A.R.; Mallah, M.; Ali, A.; Shaaban, M.F.; Mohamed, E.E.M. Enhancement of Microgrid Frequency Stability Based on the Combined Power-to-Hydrogen-to-Power Technology under High Penetration Renewable Units. Energies 2023, 16, 3377. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Rout, U.K.; Sahoo, D.K. Teaching learning based optimization algorithm for automatic generation control of power system using 2-DOF PID controller. Int. J. Electr. Power Energy Syst. 2016, 77, 287–301. [Google Scholar] [CrossRef]
- Kouba, N.E.Y.; Menaa, M.; Hasni, M.; Boudour, M. Optimal load frequency control based on artificial bee colony optimization applied to single, two and multi-area interconnected power systems. In Proceedings of the 2015 3rd International Conference on Control, Engineering Information Technology (CEIT), Tlemcen, Algeria, 25–27 May 2015. [Google Scholar] [CrossRef]
- Abid, S.; El-Rifaie, A.M.; Elshahed, M.; Ginidi, A.R.; Shaheen, A.M.; Moustafa, G.; Tolba, M.A. Development of Slime Mold Optimizer with Application for Tuning Cascaded PD-PI Controller to Enhance Frequency Stability in Power Systems. Mathematics 2023, 11, 1796. [Google Scholar] [CrossRef]
- Zhang, G.; Daraz, A.; Khan, I.A.; Basit, A.; Khan, M.I.; Ullah, M. Driver Training Based Optimized Fractional Order PI-PDF Controller for Frequency Stabilization of Diverse Hybrid Power System. Fractal Fract. 2023, 7, 315. [Google Scholar] [CrossRef]
- Singh, B.; Slowik, A.; Bishnoi, S.K.; Sharma, M. Frequency Regulation Strategy of Two-Area Microgrid System with Electric Vehicle Support Using Novel Fuzzy-Based Dual-Stage Controller and Modified Dragonfly Algorithm. Energies 2023, 16, 3407. [Google Scholar] [CrossRef]
- Mohanty, B.; Panda, S.; Hota, P. Controller parameters tuning of differential evolution algorithm and its application to load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2014, 54, 77–85. [Google Scholar] [CrossRef]
- Dash, P.; Saikia, L.C.; Sinha, N. Automatic generation control of multi area thermal system using Bat algorithm optimized PD–PID cascade controller. Int. J. Electr. Power Energy Syst. 2015, 68, 364–372. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Automatic generation control of a multi-area system using ant lion optimizer algorithm based PID plus second order derivative controller. Int. J. Electr. Power Energy Syst. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimization of Two-Stage IPD-(1I) Controllers for Frequency Regulation of Sustainable Energy Based Hybrid Microgrid Network. Electronics 2021, 10, 919. [Google Scholar] [CrossRef]
- Gheisarnejad, M. An effective hybrid harmony search and cuckoo optimization algorithm based fuzzy PID controller for load frequency control. Appl. Soft Comput. 2018, 65, 121–138. [Google Scholar] [CrossRef]
- Prakash, S.; Sinha, S. Simulation based neuro-fuzzy hybrid intelligent PI control approach in four-area load frequency control of interconnected power system. Appl. Soft Comput. 2014, 23, 152–164. [Google Scholar] [CrossRef]
- Latif, A.; Paul, M.; Das, D.C.; Hussain, S.M.S.; Ustun, T.S. Price Based Demand Response for Optimal Frequency Stabilization in ORC Solar Thermal Based Isolated Hybrid Microgrid under Salp Swarm Technique. Electronics 2020, 9, 2209. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Latif, A.; Sinha, N.; Hussain, S.S.; Ustun, T.S. Active power control of autonomous hybrid power system using two degree of freedom PID controller. Energy Rep. 2022, 8, 973–981. [Google Scholar] [CrossRef]
- Bakeer, A.; Magdy, G.; Chub, A.; Jurado, F.; Rihan, M. Optimal Ultra-Local Model Control Integrated with Load Frequency Control of Renewable Energy Sources Based Microgrids. Energies 2022, 15, 9177. [Google Scholar] [CrossRef]
- Yakout, A.H.; AboRas, K.M.; Kotb, H.; Alharbi, M.; Shouran, M.; Samad, B.A. A Novel Ultra Local Based-Fuzzy PIDF Controller for Frequency Regulation of a Hybrid Microgrid System with High Renewable Energy Penetration and Storage Devices. Processes 2023, 11, 1093. [Google Scholar] [CrossRef]
- Ayas, M.S.; Sahin, E. FOPID controller with fractional filter for an automatic voltage regulator. Comput. Electr. Eng. 2021, 90, 106895. [Google Scholar] [CrossRef]
- Fathy, A.; Alharbi, A.G. Recent Approach Based Movable Damped Wave Algorithm for Designing Fractional-Order PID Load Frequency Control Installed in Multi-Interconnected Plants With Renewable Energy. IEEE Access 2021, 9, 71072–71089. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.S.; Das, D.C.; Ustun, T.S.; Iqbal, A. A review on fractional order (FO) controllers’ optimization for load frequency stabilization in power networks. Energy Rep. 2021, 7, 4009–4021. [Google Scholar] [CrossRef]
- Singh, K.; Amir, M.; Ahmad, F.; Refaat, S.S. Enhancement of Frequency Control for Stand-Alone Multi-Microgrids. IEEE Access 2021, 9, 79128–79142. [Google Scholar] [CrossRef]
- Zaheeruddin; Singh, K. Load frequency regulation by de-loaded tidal turbine power plant units using fractional fuzzy based PID droop controller. Appl. Soft Comput. 2020, 92, 106338. [Google Scholar] [CrossRef]
- Oshnoei, S.; Aghamohammadi, M.; Oshnoei, S.; Oshnoei, A.; Mohammadi-Ivatloo, B. Provision of Frequency Stability of an Islanded Microgrid Using a Novel Virtual Inertia Control and a Fractional Order Cascade Controller. Energies 2021, 14, 4152. [Google Scholar] [CrossRef]
- Peddakapu, K.; Srinivasarao, P.; Mohamed, M.; Arya, Y.; Kishore, D.K. Stabilization of frequency in Multi-Microgrid system using barnacle mating Optimizer-based cascade controllers. Sustain. Energy Technol. Assess. 2022, 54, 102823. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N.; Dahiya, P.; Sharma, G.; Çelik, E.; Dhundhara, S.; Sharma, M. Cascade-I ΛDμN controller design for AGC of thermal and hydro-thermal power systems integrated with renewable energy sources. IET Renew. Power Gener. 2021, 15, 504–520. [Google Scholar] [CrossRef]
- Malik, S.; Suhag, S. A Novel SSA Tuned PI-TDF Control Scheme for Mitigation of Frequency Excursions in Hybrid Power System. Smart Sci. 2020, 8, 202–218. [Google Scholar] [CrossRef]
- Priyadarshani, S.; Subhashini, K.R.; Satapathy, J.K. Pathfinder algorithm optimized fractional order tilt-integral-derivative (FOTID) controller for automatic generation control of multi-source power system. Microsyst. Technol. 2020, 27, 23–35. [Google Scholar] [CrossRef]
- Oshnoei, A.; Khezri, R.; Muyeen, S.M.; Oshnoei, S.; Blaabjerg, F. Automatic Generation Control Incorporating Electric Vehicles. Electr. Power Compon. Syst. 2019, 47, 720–732. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Biswal, A.; Sekhar, G.C. Design and analysis of tilt integral derivative controller with filter for load frequency control of multi-area interconnected power systems. ISA Trans. 2016, 61, 251–264. [Google Scholar] [CrossRef]
- Elkasem, A.H.; Khamies, M.; Hassan, M.H.; Nasrat, L.; Kamel, S. Utilizing controlled plug-in electric vehicles to improve hybrid power grid frequency regulation considering high renewable energy penetration. Int. J. Electr. Power Energy Syst. 2023, 152, 109251. [Google Scholar] [CrossRef]
- Ahmed, M.; Magdy, G.; Khamies, M.; Kamel, S. Modified TID controller for load frequency control of a two-area interconnected diverse-unit power system. Int. J. Electr. Power Energy Syst. 2022, 135, 107528. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Parmar, K.P.S. A Robust Cascade Controller for Load Frequency Control of a Standalone Microgrid Incorporating Electric Vehicles. Electr. Power Compon. Syst. 2020, 48, 711–726. [Google Scholar] [CrossRef]
- Das, D.C.; Roy, A.; Sinha, N. GA based frequency controller for solar thermal–diesel–wind hybrid energy generation/energy storage system. Int. J. Electr. Power Energy Syst. 2012, 43, 262–279. [Google Scholar] [CrossRef]
- Ray, P.K.; Mohanty, S.R.; Kishor, N. Proportional–integral controller based small-signal analysis of hybrid distributed generation systems. Energy Convers. Manag. 2011, 52, 1943–1954. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Elmelegi, A.; Aly, M.; Elbaksawi, O. Optimum Modified Fractional Order Controller for Future Electric Vehicles and Renewable Energy-Based Interconnected Power Systems. IEEE Access 2021, 9, 29993–30010. [Google Scholar] [CrossRef]
- Micev, M.; Ćalasan, M.; Oliva, D. Fractional Order PID Controller Design for an AVR System Using Chaotic Yellow Saddle Goatfish Algorithm. Mathematics 2020, 8, 1182. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]


















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Sousy, F.F.M.; Alqahtani, M.H.; Aljumah, A.S.; Aly, M.; Almutairi, S.Z.; Mohamed, E.A. Design Optimization of Improved Fractional-Order Cascaded Frequency Controllers for Electric Vehicles and Electrical Power Grids Utilizing Renewable Energy Sources. Fractal Fract. 2023, 7, 603. https://doi.org/10.3390/fractalfract7080603
El-Sousy FFM, Alqahtani MH, Aljumah AS, Aly M, Almutairi SZ, Mohamed EA. Design Optimization of Improved Fractional-Order Cascaded Frequency Controllers for Electric Vehicles and Electrical Power Grids Utilizing Renewable Energy Sources. Fractal and Fractional. 2023; 7(8):603. https://doi.org/10.3390/fractalfract7080603
Chicago/Turabian StyleEl-Sousy, Fayez F. M., Mohammed H. Alqahtani, Ali S. Aljumah, Mokhtar Aly, Sulaiman Z. Almutairi, and Emad A. Mohamed. 2023. "Design Optimization of Improved Fractional-Order Cascaded Frequency Controllers for Electric Vehicles and Electrical Power Grids Utilizing Renewable Energy Sources" Fractal and Fractional 7, no. 8: 603. https://doi.org/10.3390/fractalfract7080603