
Analysis and Experimental Verification of the Sealing Performance of PEM Fuel Cell Based on Fractal Theory
Abstract
:1. Introduction
2. Materials and Methods
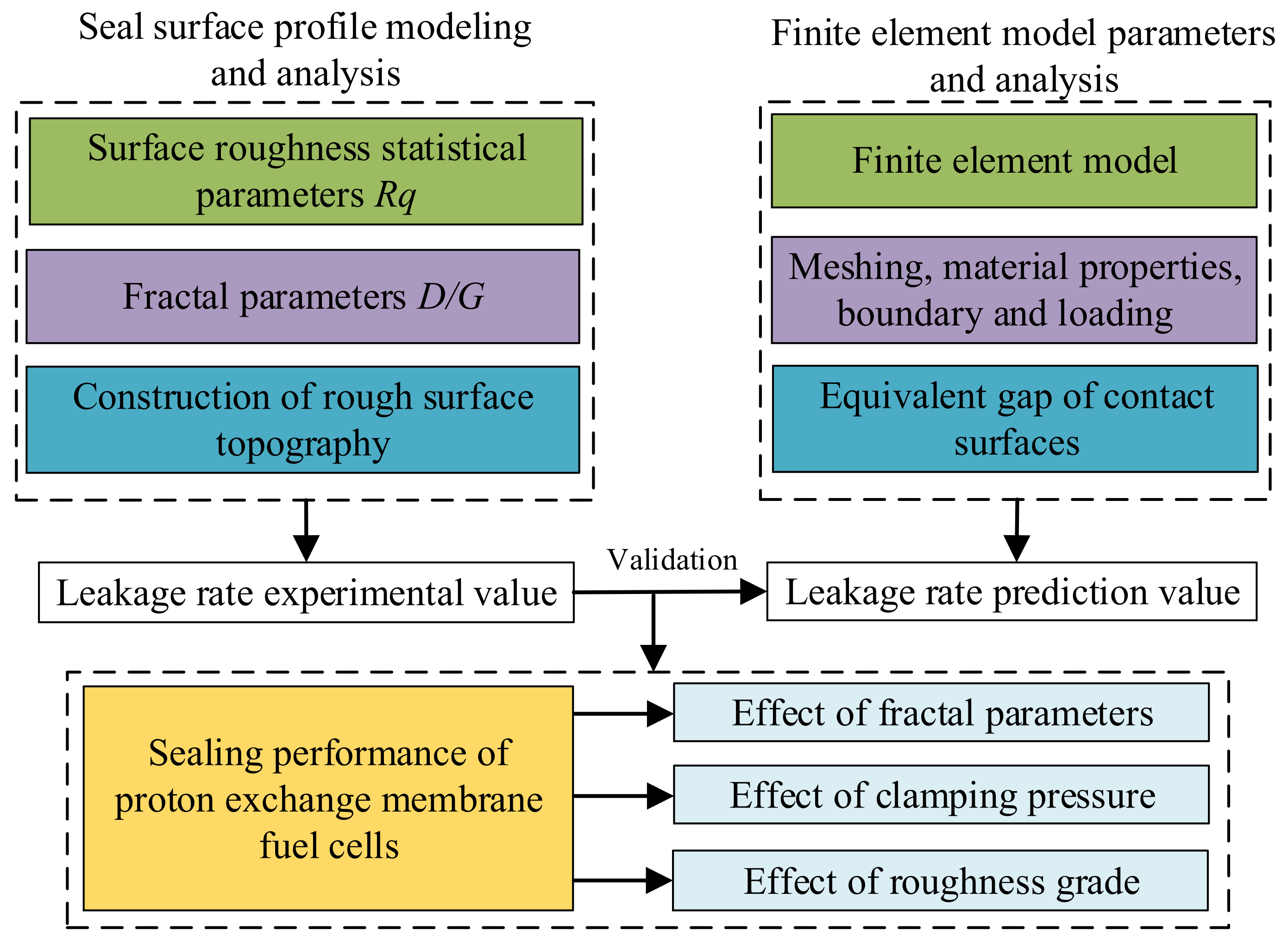
2.1. Model Developments
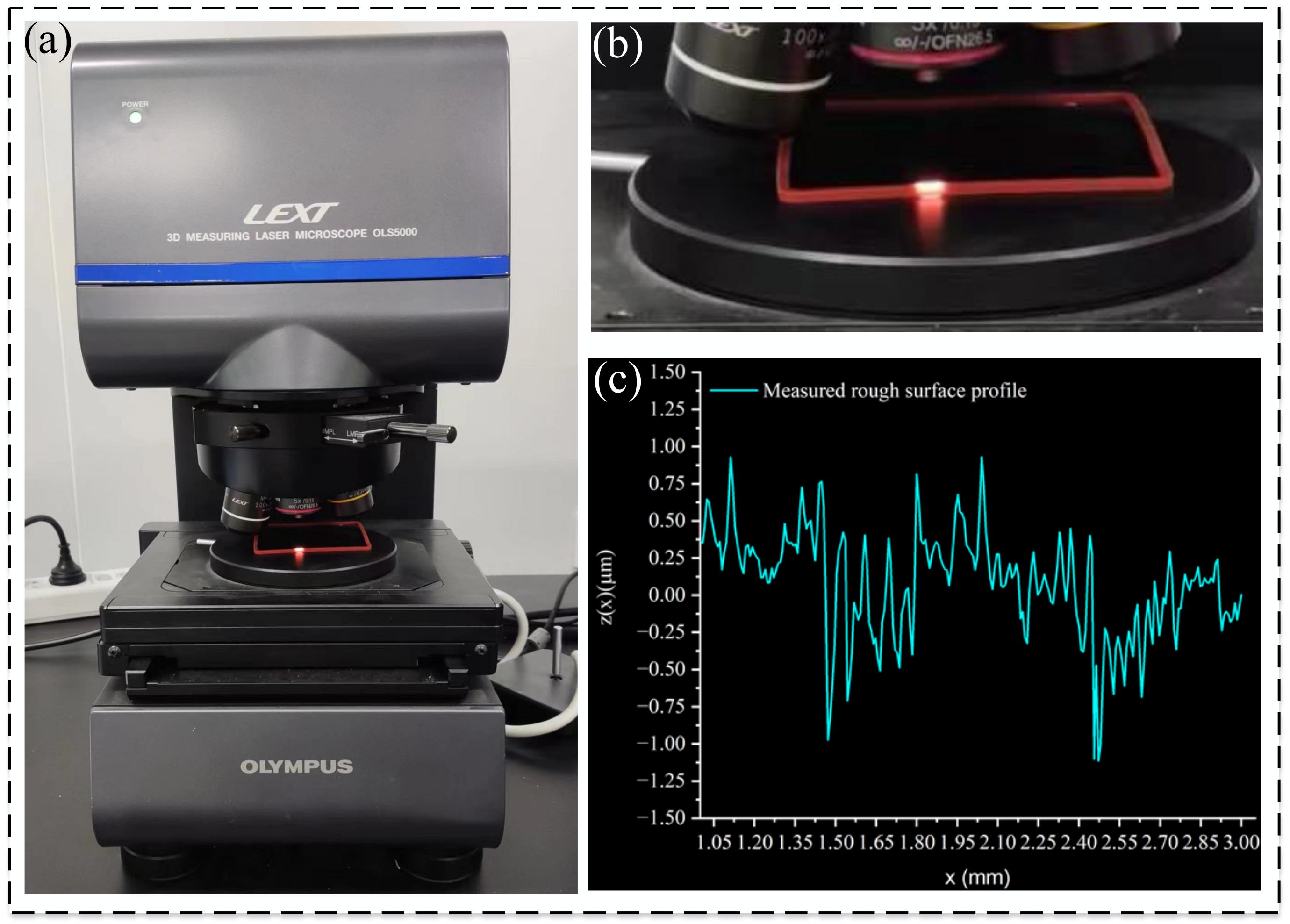
2.2. Dual Characterization Method to Construct Seal Surface Micromorphology
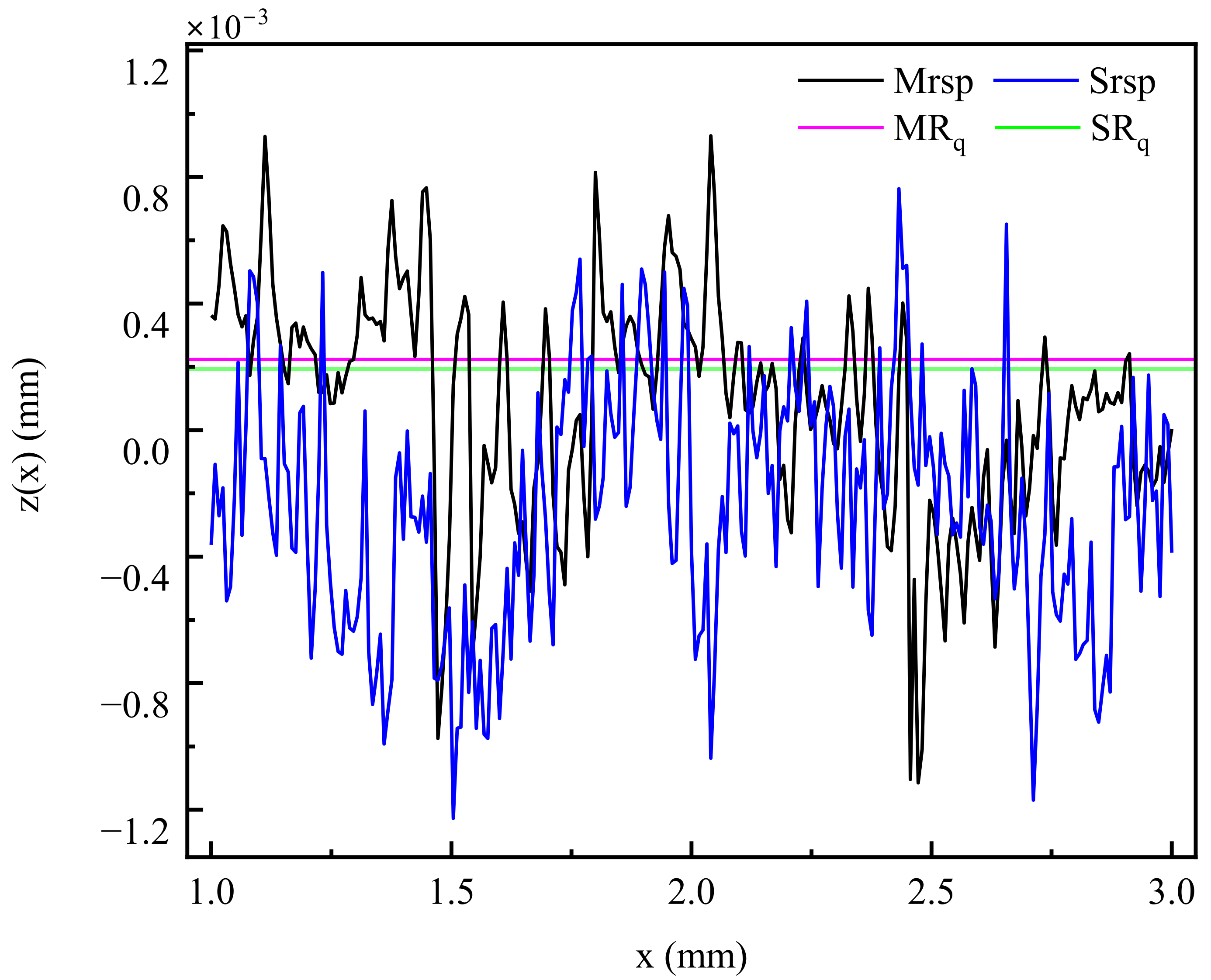
2.2.1. Root Mean Square Deviation Method
2.2.2. Weierstrass–Mandelbrot Function
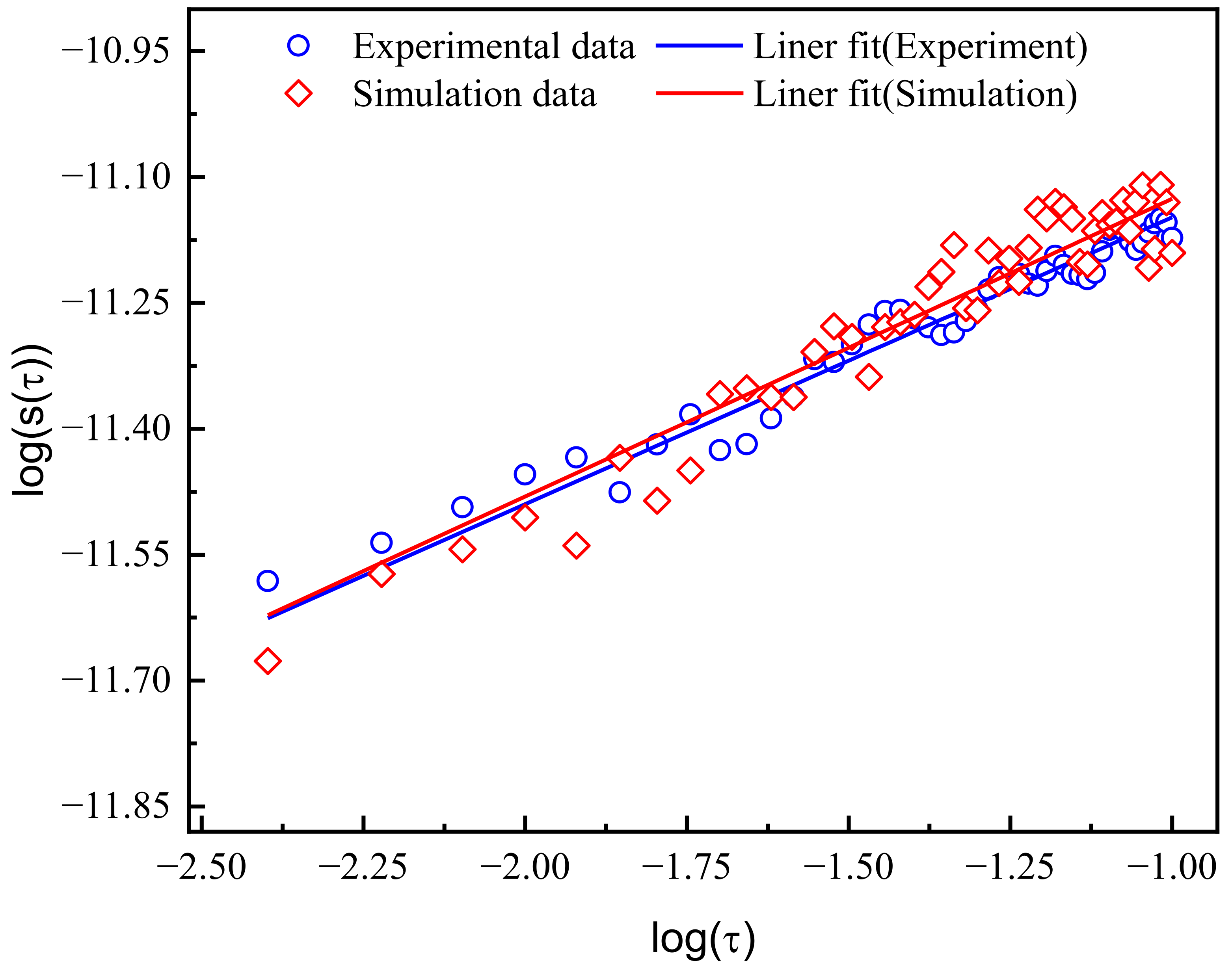
2.2.3. Structure Function Method
2.3. Fuel Cell Model Construction
2.3.1. Model Assumptions
- The single cell is in a steady state.
- The material’s properties are independent of temperature.
- The deformation and swelling of the proton exchange membrane are ignored.
- The gas diffusion layer consists of an isotropic porous medium.
- The deformation of the component changes mainly in the direction of the clamping force, ignoring the deformation in other directions.
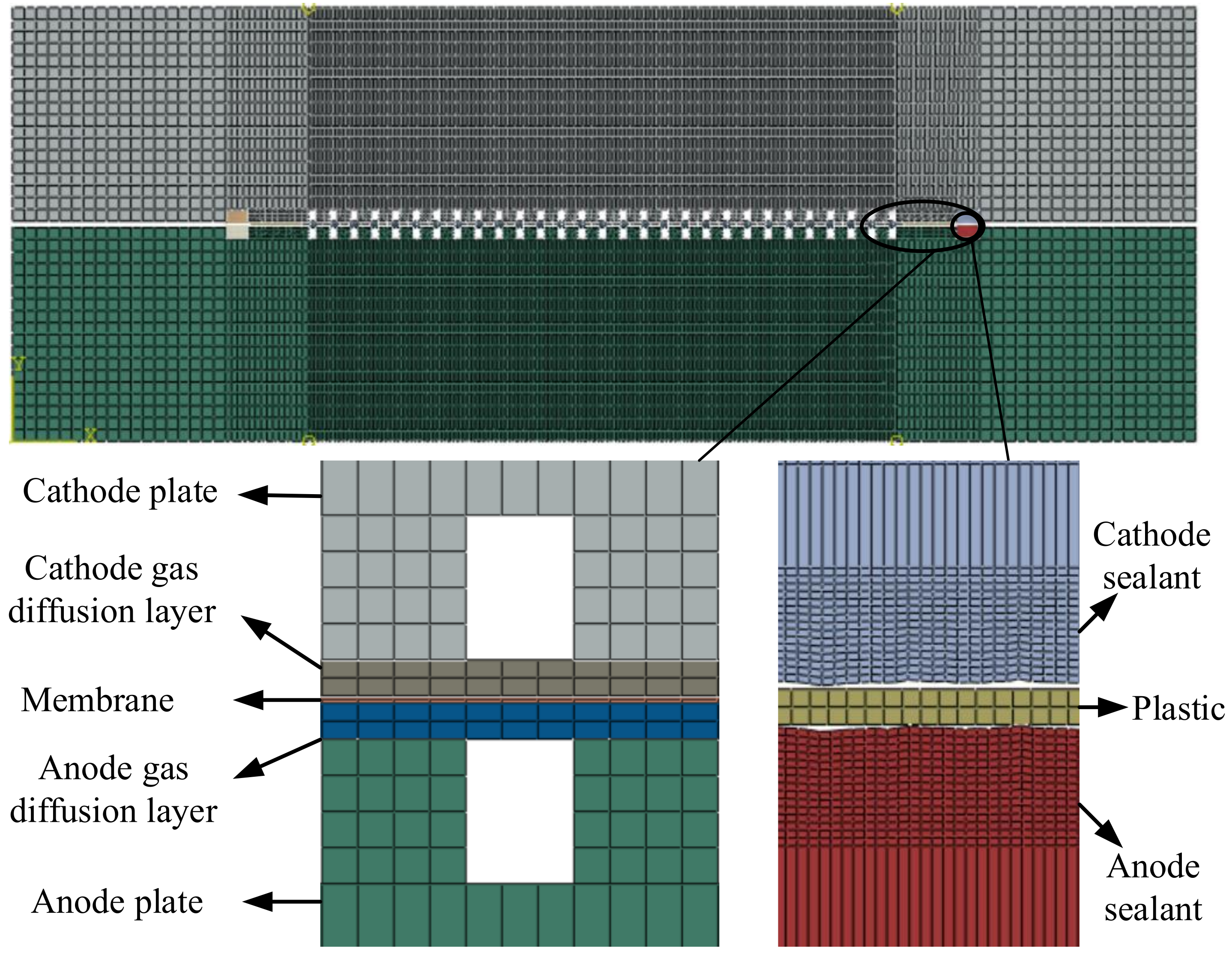
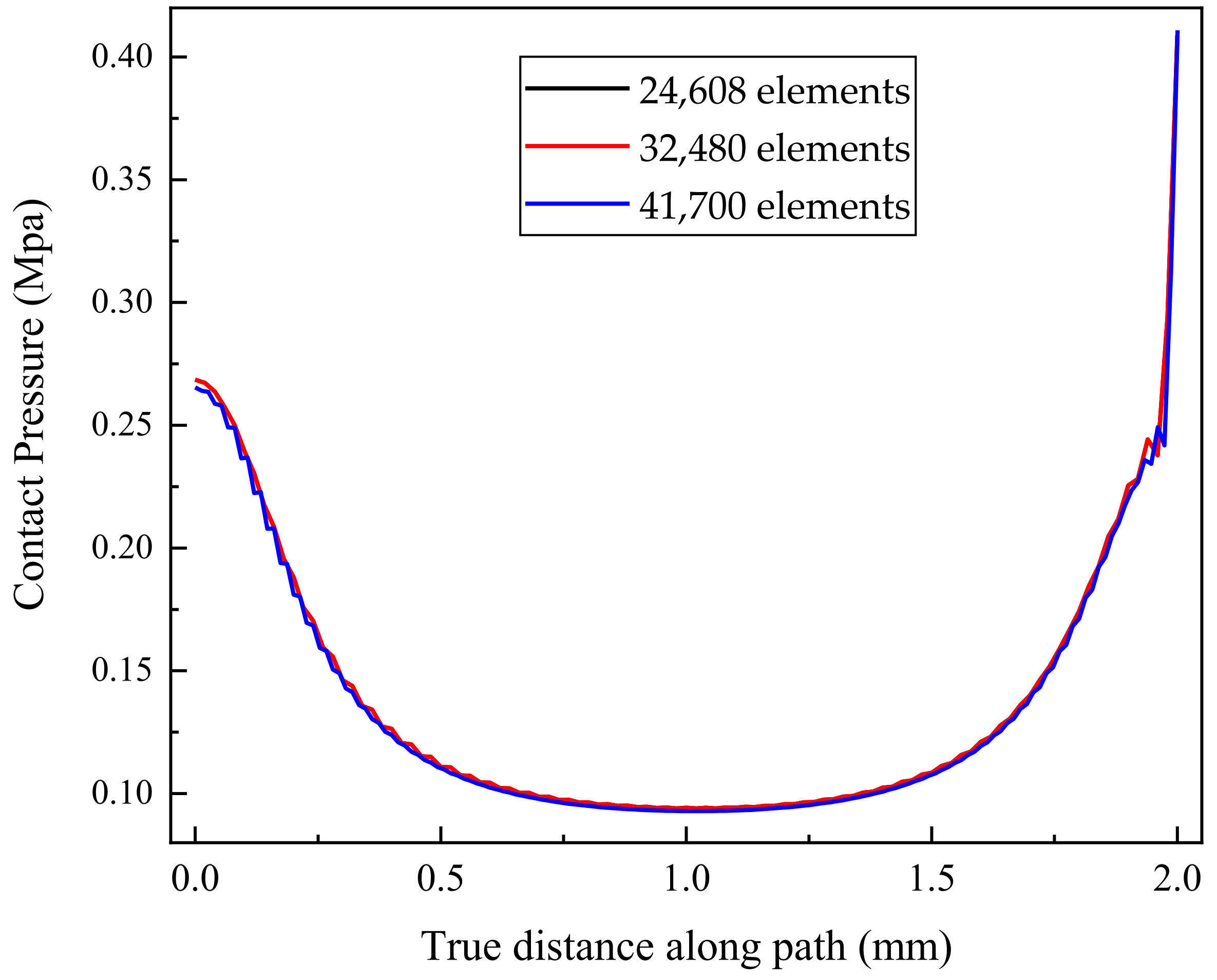
2.3.2. Simulation Model
2.3.3. Boundary Conditions
2.4. Evaluation Method of Sealing Performance
2.4.1. Critical Sealing Pressure
2.4.2. Leakage Rate
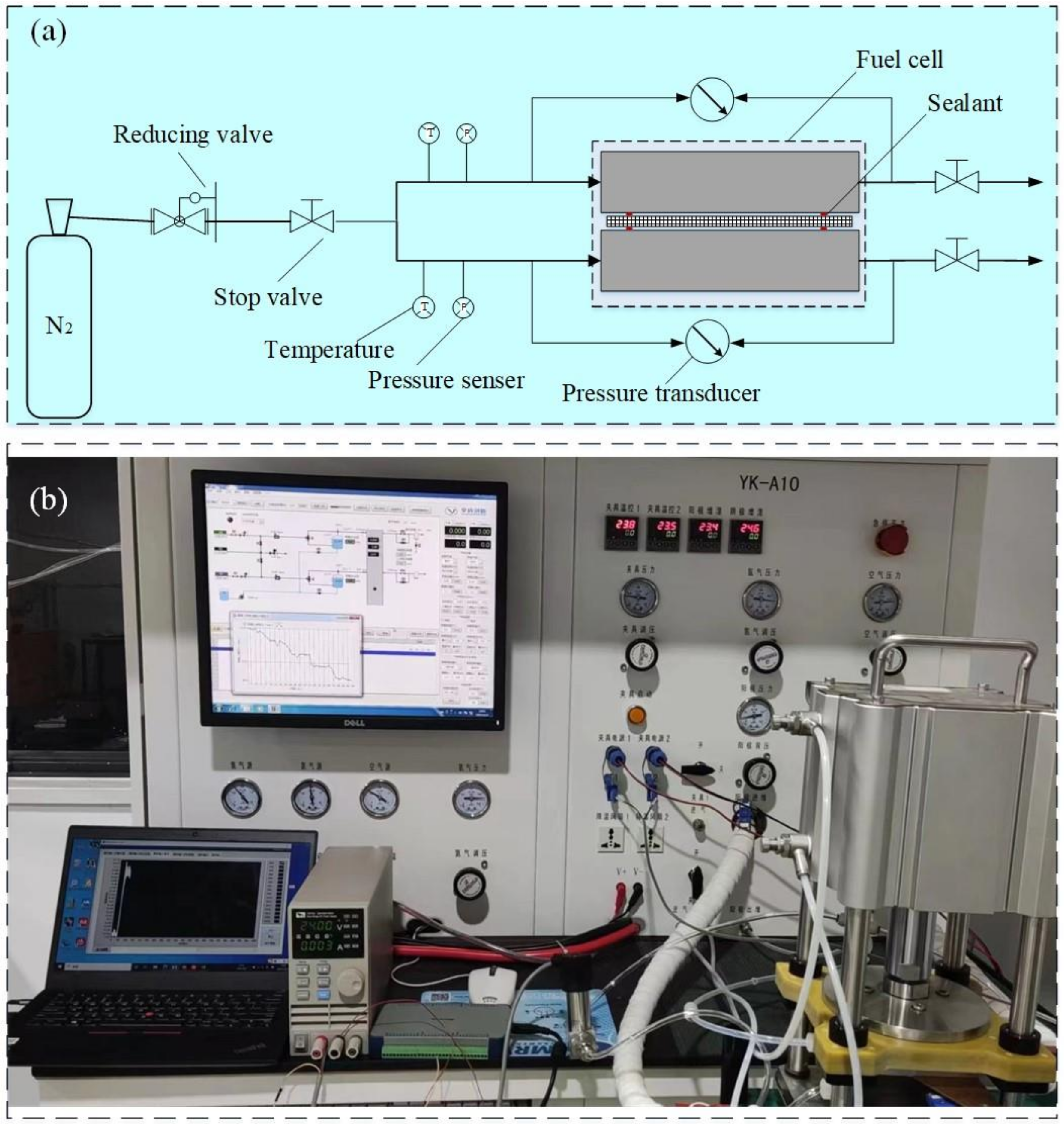
2.5. Model Validation
3. Results and Discussion
3.1. Effect of Fractal Parameters on Surface Roughness
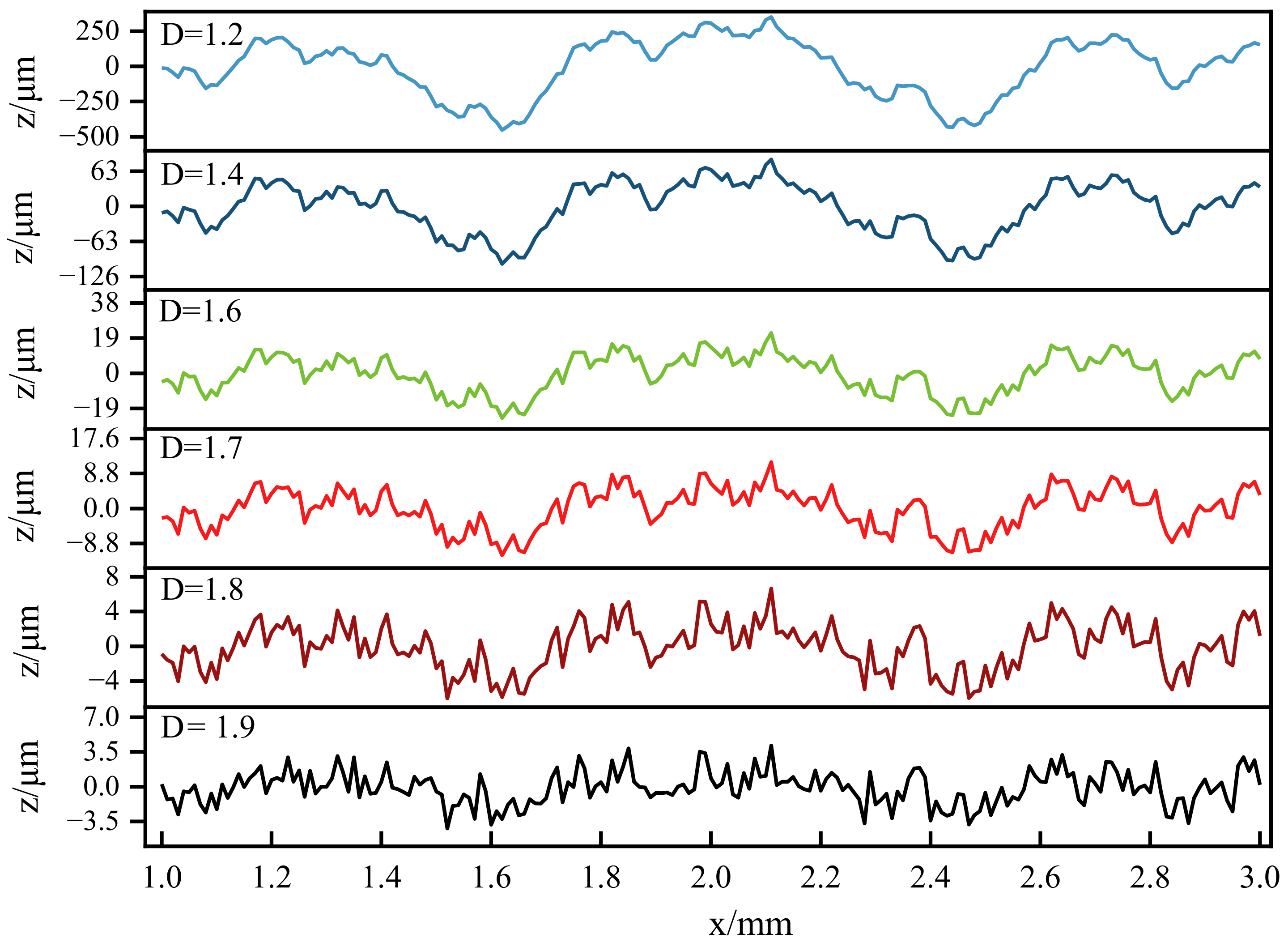
3.1.1. Fractal Dimensions
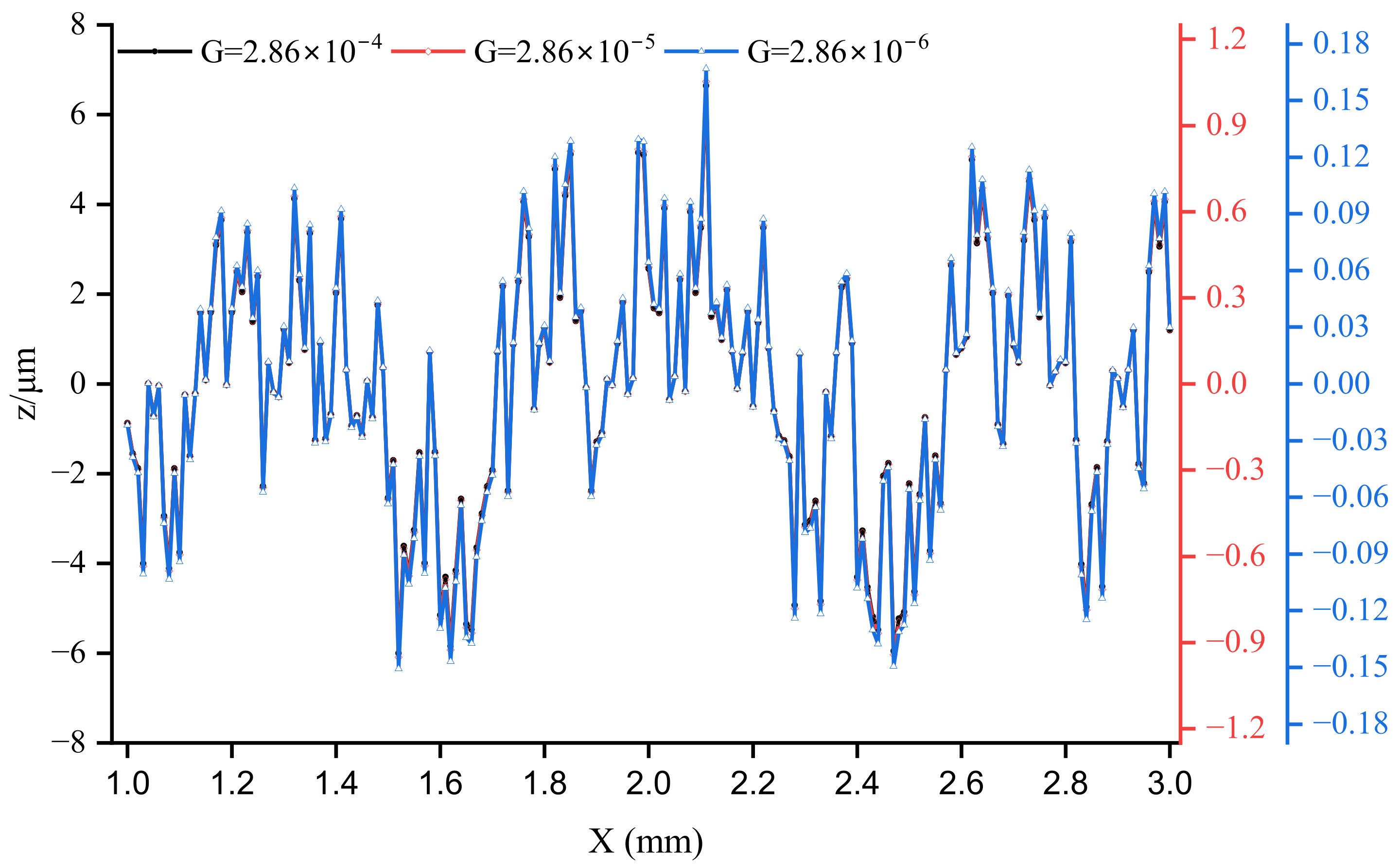
3.1.2. Characteristic Scale Coefficients
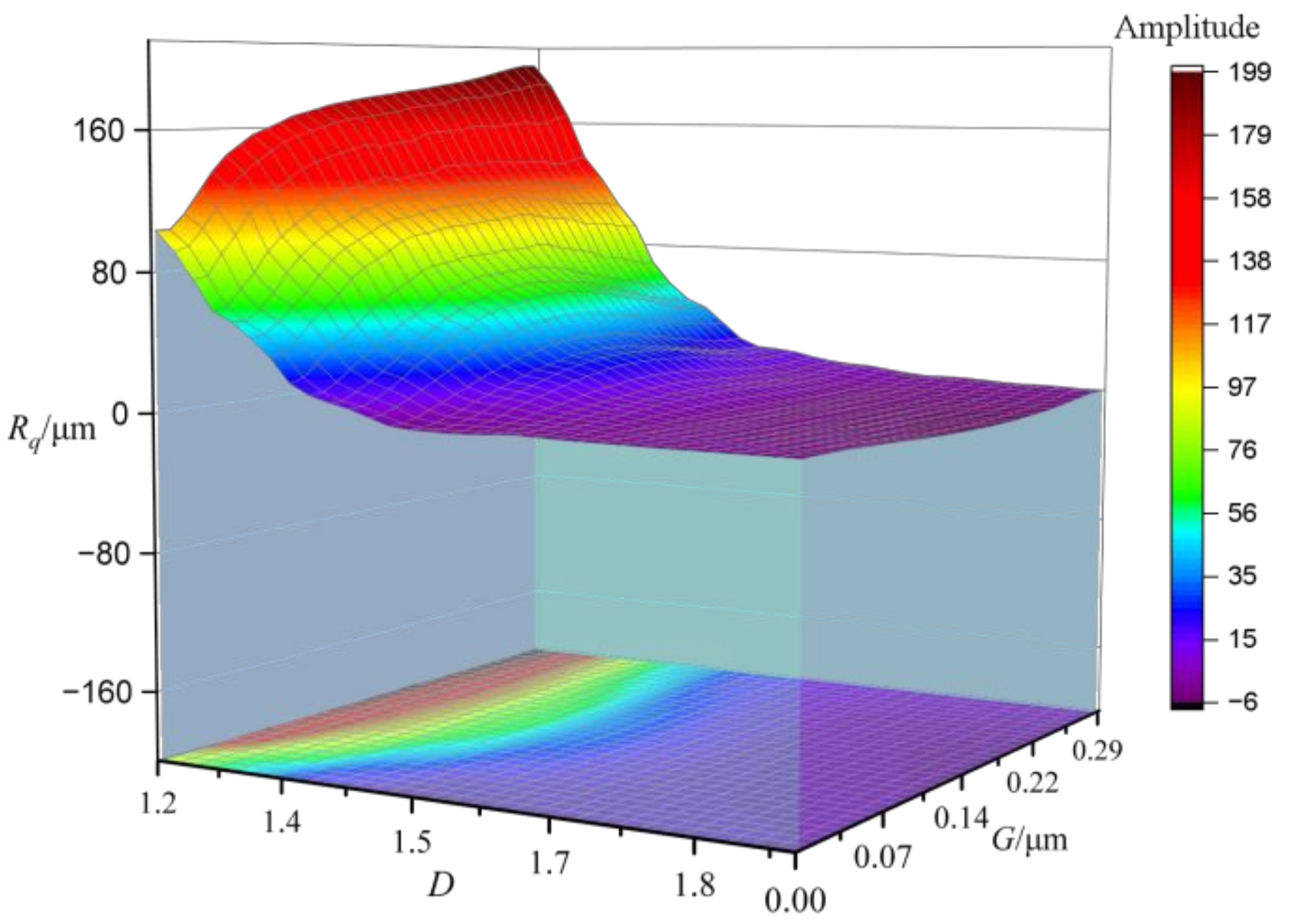
3.1.3. Surface Roughness
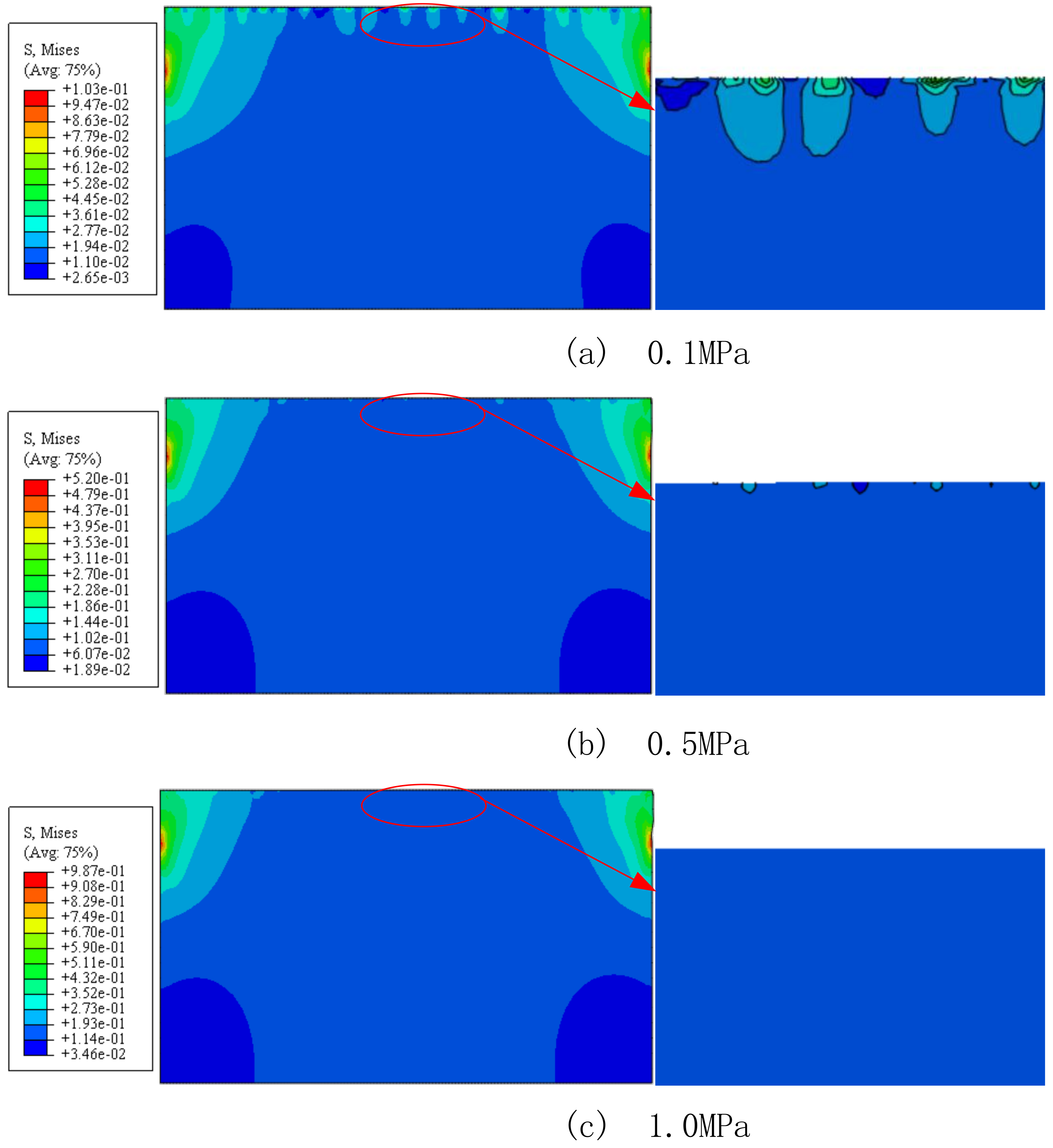
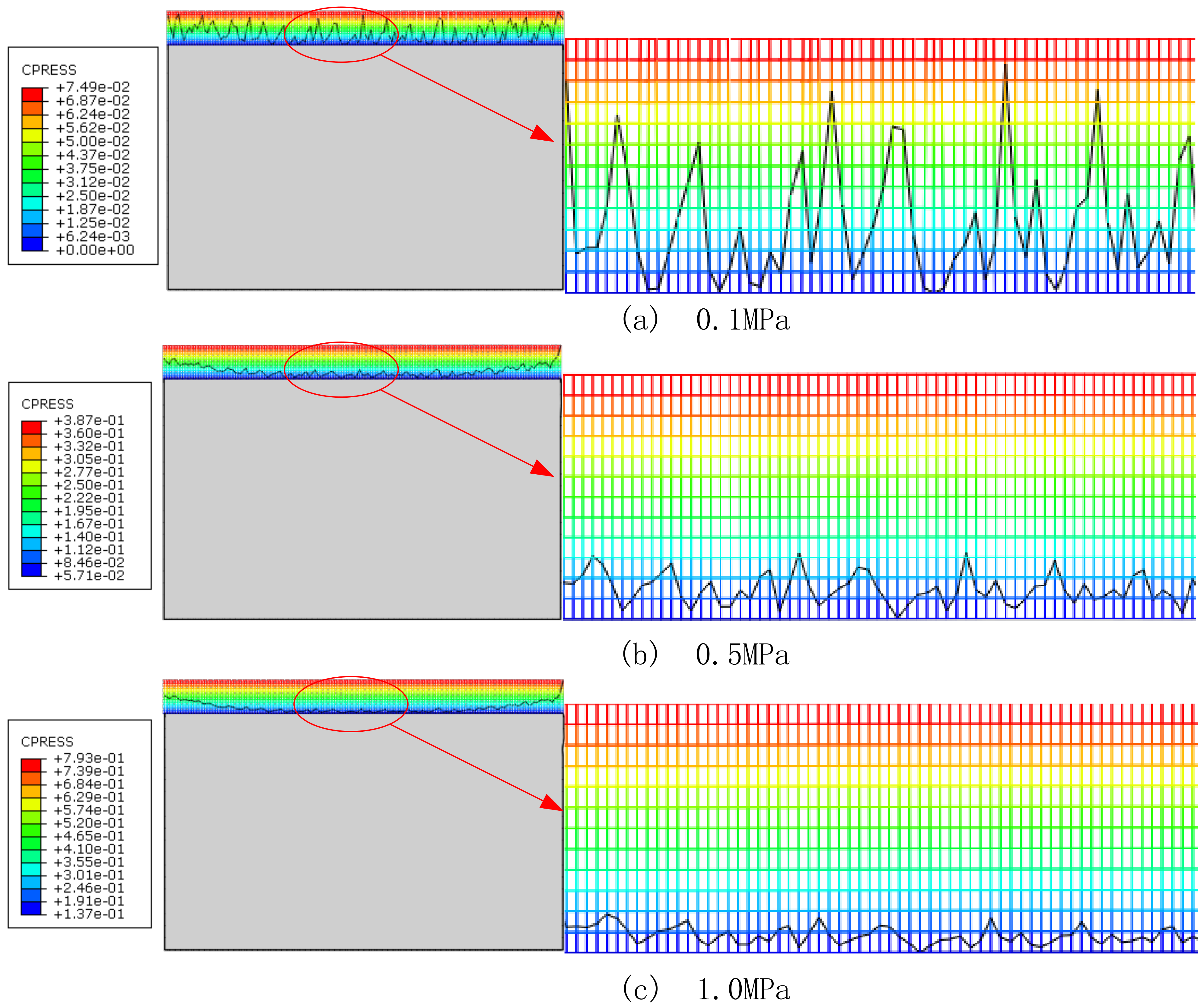
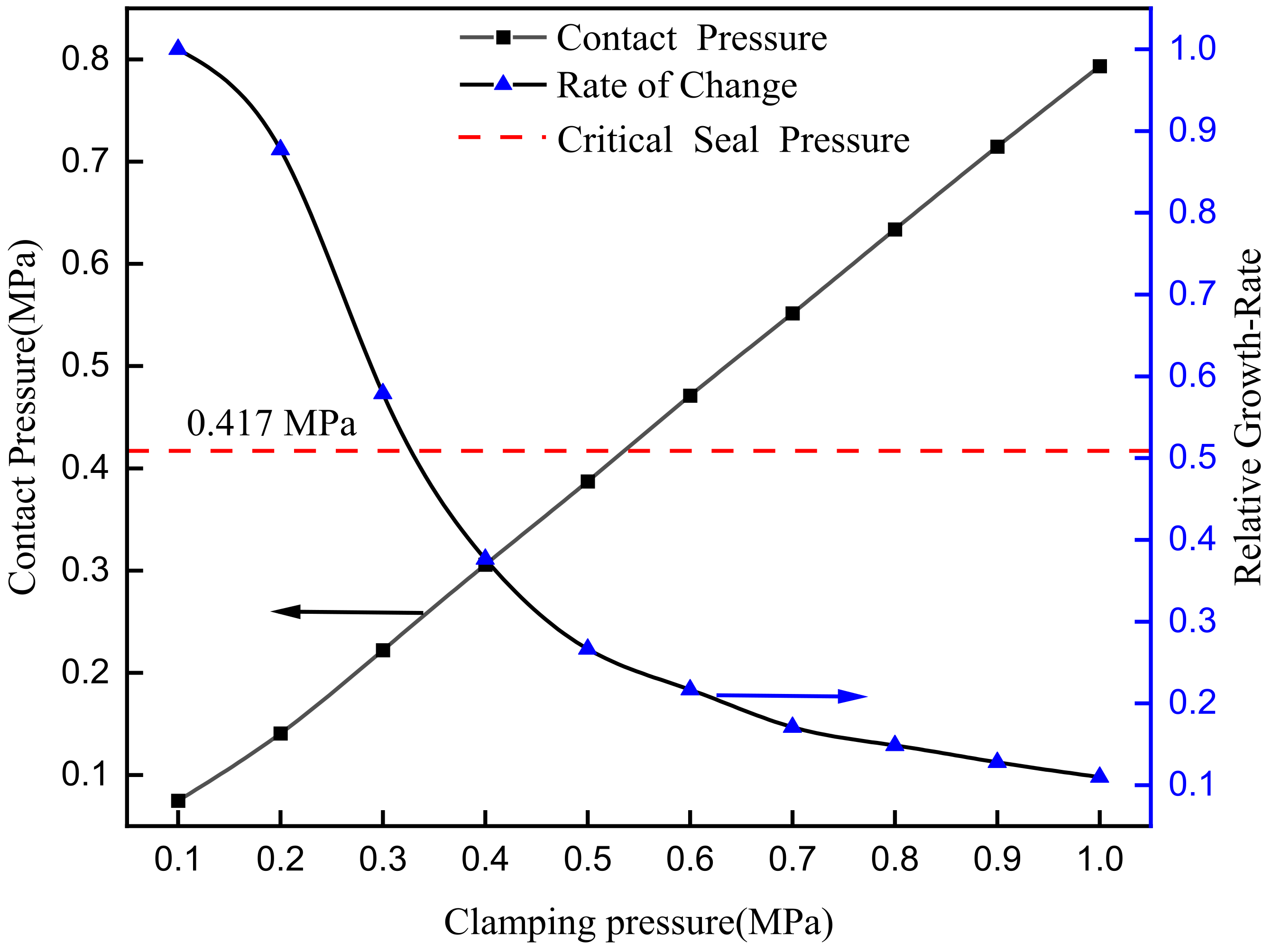
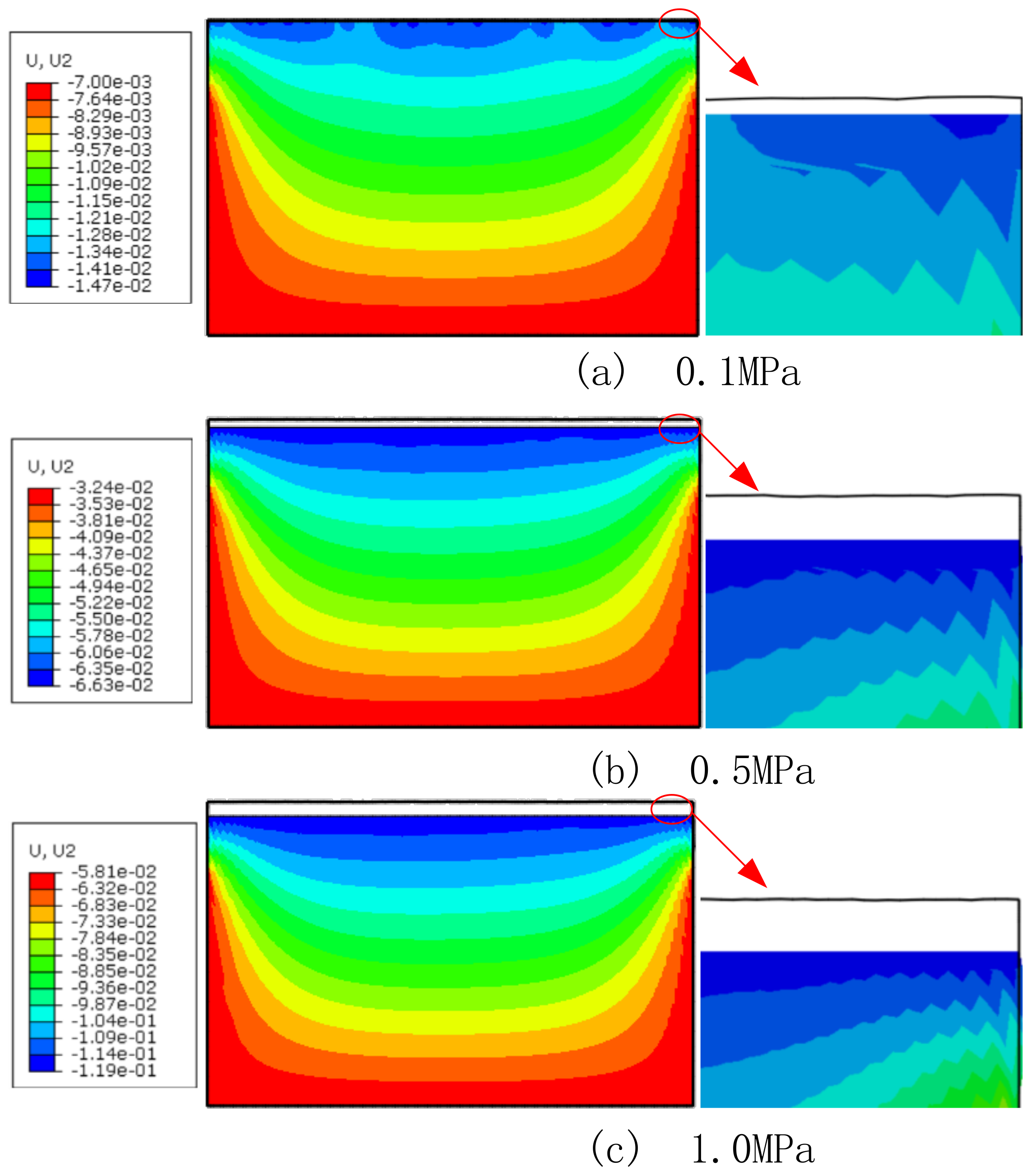
3.2. Effect of Clamping Pressure on Sealing Performance
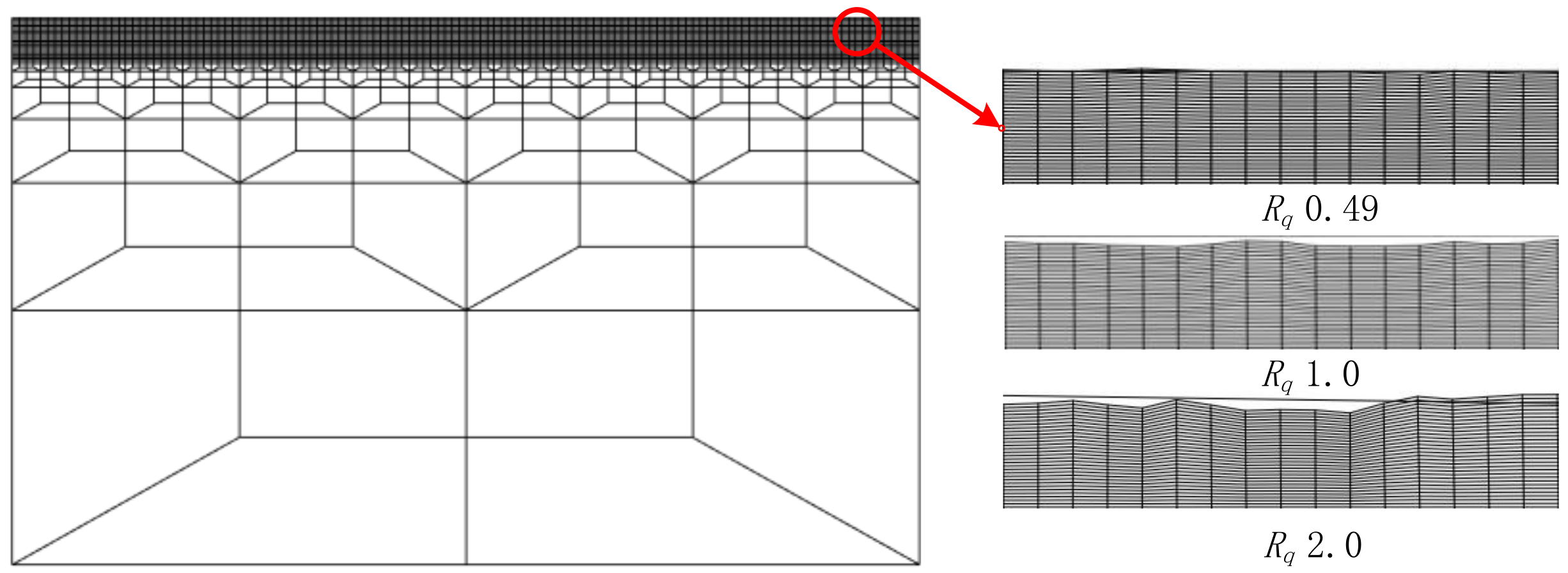
3.3. Effect of Surface Topography
4. Conclusions
- The fractal dimension D and the characteristic scale coefficient G have contrary impacts on the surface topography. The surface roughness Rq is determined by the interaction of both D and G.
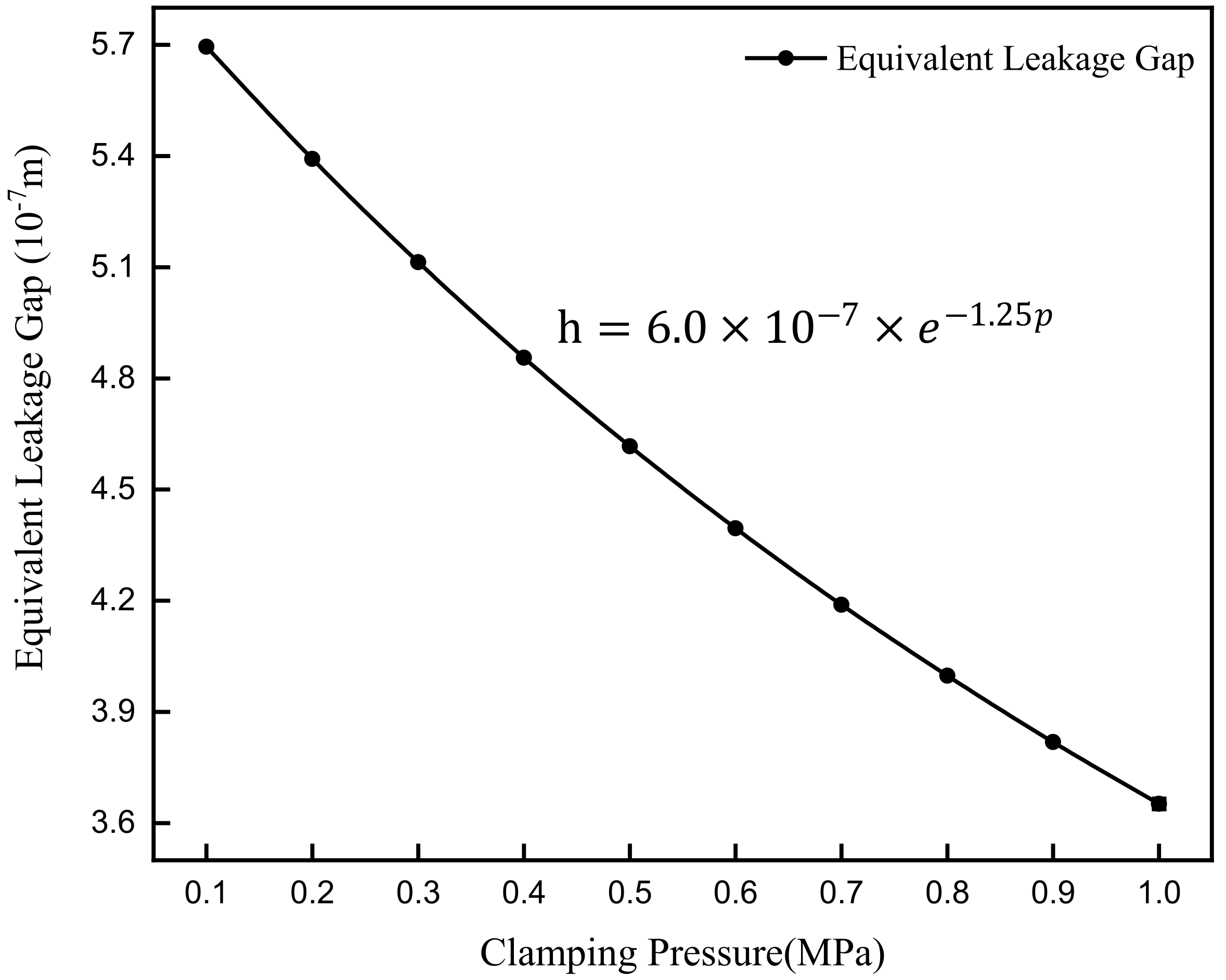
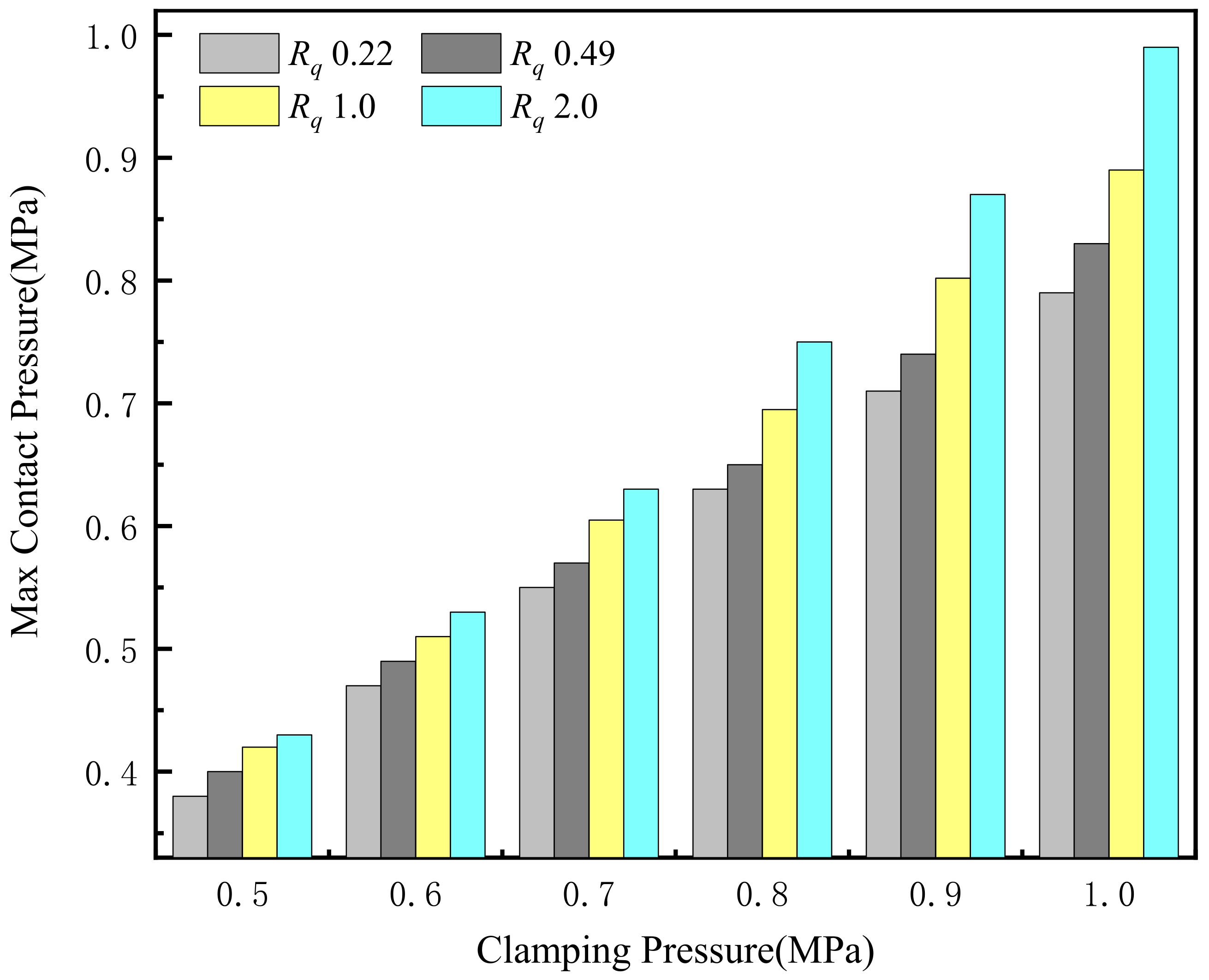
- Increasing the clamping pressure improves the sealing performance of the system due to the increase in the contact pressure and strain displacement on the surface of the sealing accompanied by the exponential decrease in the equivalent leakage gap.
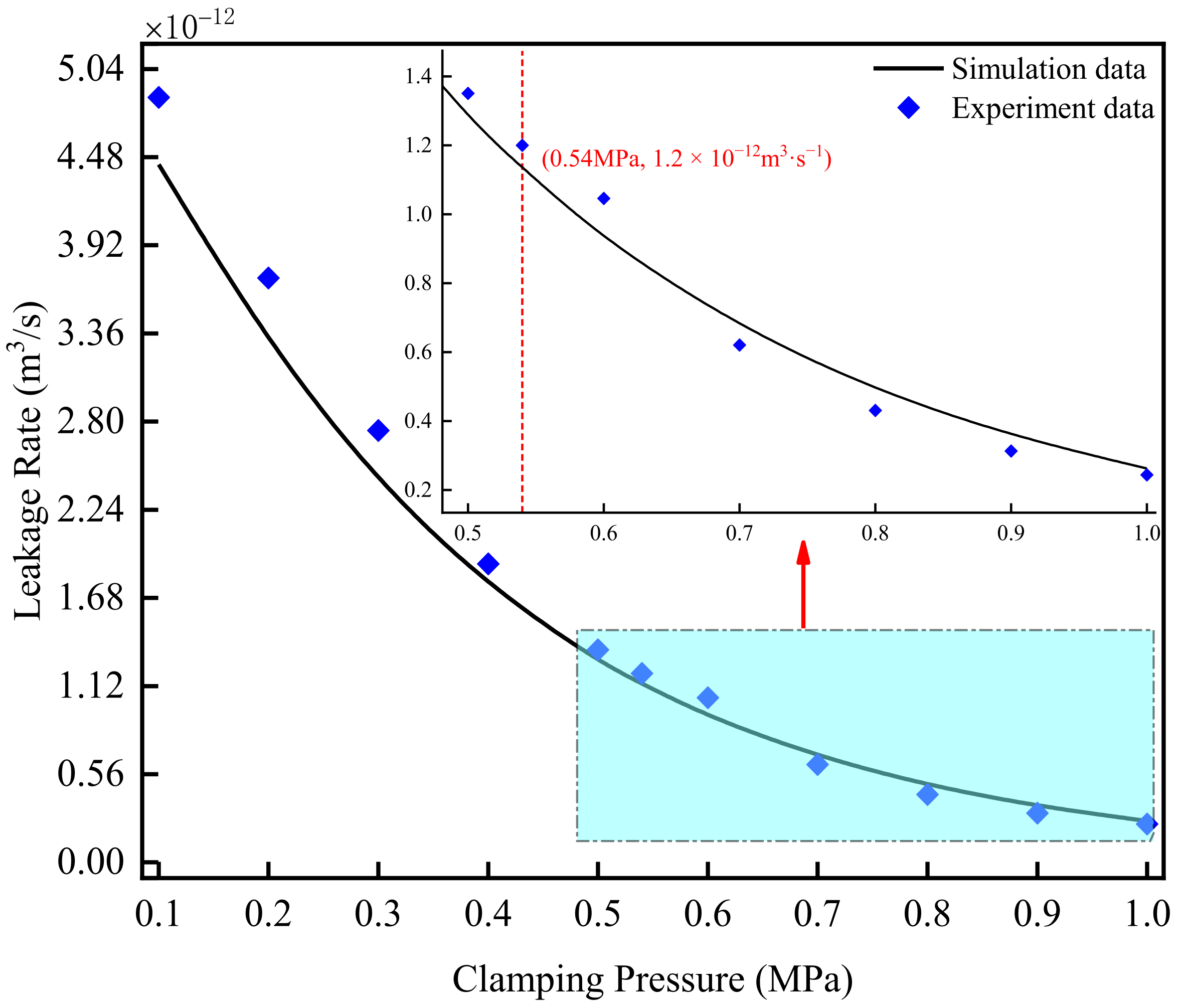
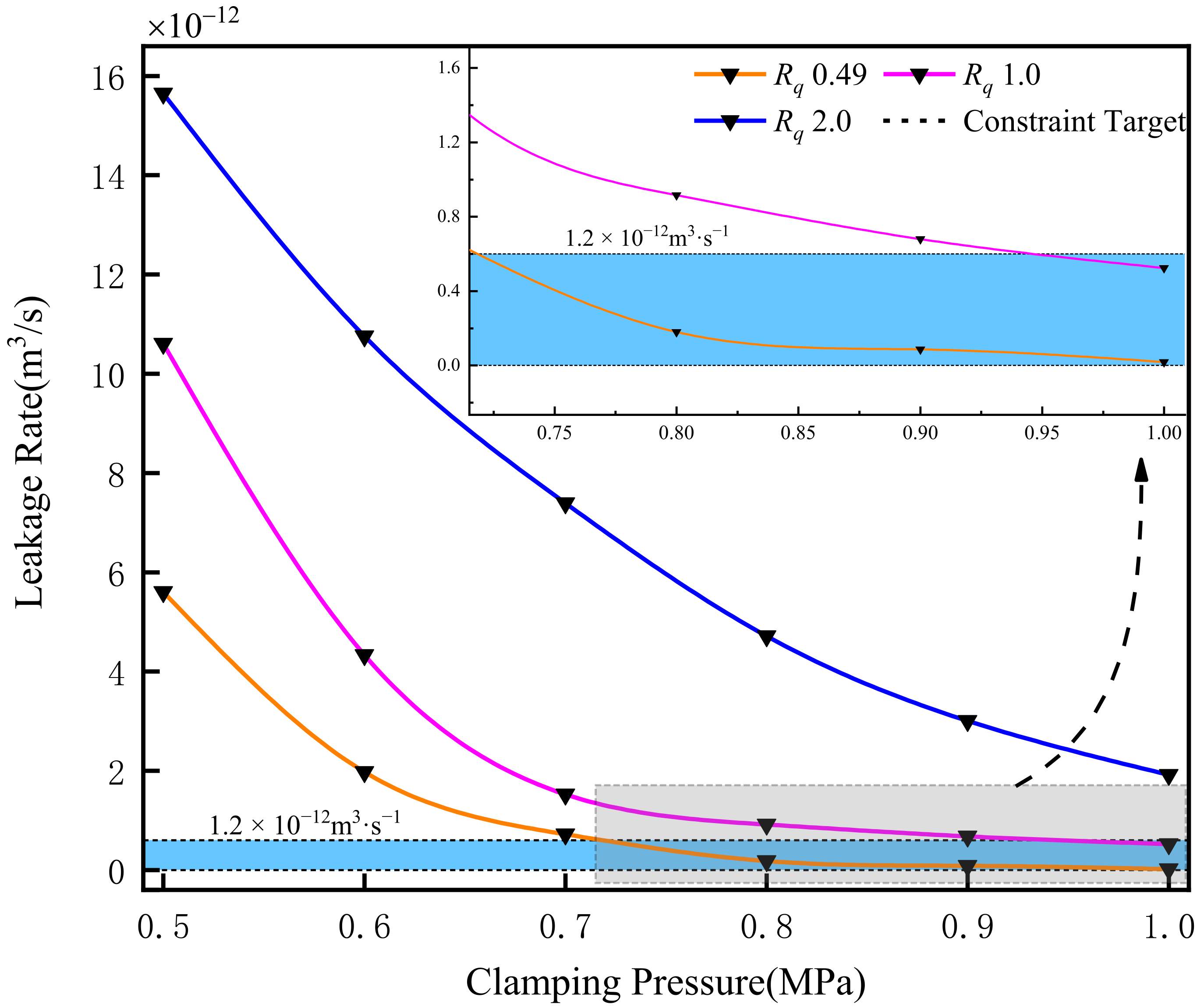
- When the surface roughness is Rq 0.22, the required clamping pressure is 0.54 MPa and the corresponding leakage rate is 1.2 × 10−12m3·s−1; they are consistent with the experimental data, verifying the feasibility of the model in simulating parameter variations.
- Constrained by the leakage rate, when the surface roughness is less than 1 μm, the clamping pressure needs to be increased by 31% with every doubling of the roughness value; when the surface roughness is greater than 1 μm, the clamping pressure needs to be increased by 50%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Singh, S.; Jain, S.; Ps, V.; Tiwari, A.K.; Nouni, M.R.; Pandey, J.K.; Goel, S. Hydrogen: A sustainable fuel for future of the transport sector. Renew. Sustain. Energy Rev. 2015, 51, 623–633. [Google Scholar] [CrossRef]
- Sharma, S.; Ghoshal, S.K. Hydrogen the future transportation fuel: From production to applications. Renew. Sustain. Energy Rev. 2015, 43, 1151–1158. [Google Scholar] [CrossRef]
- Chakraborty, U. Fuel crossover and internal current in proton exchange membrane fuel cell modeling. Appl. Energy 2016, 163, 60–62. [Google Scholar] [CrossRef]
- Cui, T.; Chao, Y.J.; Van Zee, J.W. Stress relaxation behavior of EPDM seals in polymer electrolyte membrane fuel cell environment. Int. J. Hydrogen Energy 2012, 37, 13478–13483. [Google Scholar] [CrossRef]
- Qiu, D.; Liang, P.; Peng, L.; Yi, P.; Lai, X.; Ni, J. Material behavior of rubber sealing for proton exchange membrane fuel cells. Int. J. Hydrogen Energy 2020, 45, 5465–5473. [Google Scholar] [CrossRef]
- Kim, M.; Lee, D.G. Development of the anode bipolar plate/membrane assembly unit for air breathing PEMFC stack using silicone adhesive bonding. J. Power Sources 2016, 315, 86–95. [Google Scholar] [CrossRef]
- Fernandes, V.A.; De Focatiis, D.S.A. The role of deformation history on stress relaxation and stress memory of filled rubber. Polym. Test. 2014, 40, 124–132. [Google Scholar] [CrossRef]
- Cui, T.; Chao, Y.J.; Van Zee, J.W. Sealing force prediction of elastomeric seal material for PEM fuel cell under temperature cycling. Int. J. Hydrogen Energy 2014, 39, 1430–1438. [Google Scholar] [CrossRef]
- Zhou, C.; Zheng, J.; Gu, C.; Zhao, Y.; Liu, P. Sealing performance analysis of rubber O-ring in high-pressure gaseous hydrogen based on finite element method. Int. J. Hydrogen Energy 2017, 42, 11996–12004. [Google Scholar] [CrossRef]
- Shao, Y.; Yin, Y.; Du, S.; Xia, T.; Xi, L. Leakage monitoring in static sealing interface based on three dimensional surface topography indicator. J. Manuf. Sci. Eng. Trans. ASME 2018, 140, 101003. [Google Scholar] [CrossRef]
- Irfan, M.S.; Gill, Y.Q.; Hashmi, M.; Ullah, S.; Saeed, F.; Qaiser, A.A. Long-term stress relaxation behavior of Polyaniline-EPDM blends using the time-temperature-strain superposition method. Mater. Res. Express 2019, 6, 025318. [Google Scholar] [CrossRef]
- Li, C.; Ding, Y.; Yang, Z.; Yuan, Z.; Ye, L. Compressive stress-thermo oxidative ageing behaviour and mechanism of EPDM rubber gaskets for sealing resilience assessment. Polym. Test. 2020, 84, 106366. [Google Scholar] [CrossRef]
- Hu, G.; Ji, C.; Xia, Y.; Suo, Y.; Wu, X.; Zhang, Z. Assembly mechanics and its effect on performance of proton exchange membrane fuel cell. Int. J. Electrochem. Sci. 2019, 14, 1358–1371. [Google Scholar] [CrossRef]
- Persson, B.N.J.; Yang, C. Theory of the leak-rate of seals. J. Phys. Condens. Matter 2008, 20, 315011. [Google Scholar] [CrossRef]
- Persson, B.N.J.; Albohr, O.; Creton, C.; Peveri, V. Contact area between a viscoelastic solid and a hard, randomly rough, substrate. J. Chem. Phys. 2004, 120, 8779–8793. [Google Scholar] [CrossRef]
- Lorenz, B.; Persson, B.N.J. Leak rate of seals: Comparison of theory with experiment. Europhys. Lett. 2009, 86, 44006. [Google Scholar] [CrossRef]
- Lorenz, B.; Persson, B.N.J. Leak rate of seals: Effective-medium theory and comparison with experiment. Eur. Phys. J. E 2010, 31, 159–167. [Google Scholar] [CrossRef]
- Bottiglione, F.; Carbone, G.; Mantriota, G. Fluid leakage in seals: An approach based on percolation theory. Tribol. Int. 2009, 42, 731–737. [Google Scholar] [CrossRef]
- Marie, C.; Lasseux, D. Experimental leak-rate measurement through a static metal seal. J. Fluids Eng. Trans. ASME 2007, 129, 799–805. [Google Scholar] [CrossRef]
- Gan, L.; Yuan, Y.; Liu, K.; Cheng, Y.; Zhang, J. Mechanical model of elastic-plastic contact between fractal rough surfaces. Yingyong Lixue Xuebao/Chin. J. Appl. Mech. 2016, 33, 738–743. [Google Scholar]
- Liu, Y.; An, Q.; Huang, M.; Shang, D.; Bai, L. A Novel Modeling Method of Micro-Topography for Grinding Surface Based on Ubiquitiform Theory. Fractal Fract. 2022, 6, 341. [Google Scholar] [CrossRef]
- Putignano, C.; Afferrante, L.; Carbone, G.; Demelio, G. A new efficient numerical method for contact mechanics of rough surfaces. Int. J. Solids Struct. 2012, 49, 338–343. [Google Scholar] [CrossRef]
- Yang, Y.; Cheng, H.; Du, K.; Liang, B.; Hu, W.; Luo, B.; Zhang, K. Microscale damage modeling of bolt-hole contact interface during the bolt installation process of composite structure. Compos. Struct. 2022, 291, 115561. [Google Scholar] [CrossRef]
- Bora, C.K.; Plesha, M.E.; Carpick, R.W. A Numerical Contact Model Based on Real Surface Topography. Tribol. Lett. 2013, 50, 331–347. [Google Scholar] [CrossRef]
- Song, H.; Vakis, A.I.; Liu, X.; Van der Giessen, E. Statistical model of rough surface contact accounting for size-dependent plasticity and asperity interaction. J. Mech. Phys. Solids 2017, 106, 1–14. [Google Scholar] [CrossRef]
- Xiao, H.; Sun, Y. On the normal contact stiffness and contact resonance frequency of rough surface contact based on asperity micro-contact statistical models. Eur. J. Mech. A Solids 2019, 75, 450–460. [Google Scholar] [CrossRef]
- Xu, K.; Yuan, Y.; Zhang, L. A normal contact stiffness model of joint surface based on fractal theory. Comput. Model. Eng. Sci. 2019, 119, 459–480. [Google Scholar] [CrossRef]
- Jamshidi, H.; Ahmadian, H. A modified rough interface model considering shear and normal elastic deformation couplings. Int. J. Solids Struct. 2020, 203, 57–72. [Google Scholar] [CrossRef]
- Zenyuk, I.V.; Parkinson, D.Y.; Hwang, G.; Weber, A.Z. Probing water distribution in compressed fuel-cell gas-diffusion layers using X-ray computed tomography. Electrochem. Commun. 2015, 53, 24–28. [Google Scholar] [CrossRef]
- Tötzke, C.; Gaiselmann, G.; Osenberg, M.; Arlt, T.; Markötter, H.; Hilger, A.; Kupsch, A.; Müller, B.; Schmidt, V.; Lehnert, W.; et al. Influence of hydrophobic treatment on the structure of compressed gas diffusion layers. J. Power Sources 2016, 324, 625–636. [Google Scholar] [CrossRef]
- Molaeimanesh, G.R.; Nazemian, M. Investigation of GDL compression effects on the performance of a PEM fuel cell cathode by lattice Boltzmann method. J. Power Sources 2017, 359, 494–506. [Google Scholar] [CrossRef]
- Wen, C.Y.; Lin, Y.S.; Lu, C.H. Experimental study of clamping effects on the performances of a single proton exchange membrane fuel cell and a 10-cell stack. J. Power Sources 2009, 192, 475–485. [Google Scholar] [CrossRef]
- Taymaz, I.; Benli, M. Numerical study of assembly pressure effect on the performance of proton exchange membrane fuel cell. Energy 2010, 35, 2134–2140. [Google Scholar] [CrossRef]
- Alizadeh, E.; Barzegari, M.M.; Momenifar, M.; Ghadimi, M.; Saadat, S.H.M. Investigation of contact pressure distribution over the active area of PEM fuel cell stack. Int. J. Hydrogen Energy 2016, 41, 3062–3071. [Google Scholar] [CrossRef]
- Irmscher, P.; Qui, D.; Janßen, H.; Lehnert, W.; Stolten, D. Impact of gas diffusion layer mechanics on PEM fuel cell performance. Int. J. Hydrogen Energy 2019, 44, 23406–23415. [Google Scholar] [CrossRef]
- Hu, G. Finite element analysis of PEMFC assembling based on Ansys. Int. J. Electrochem. Sci. 2018, 13, 2080–2089. [Google Scholar] [CrossRef]
- Wenling, X. Performance Analysis and Optimization Design of Fuel Cell Sealing Structure. Master’s Thesis, Dalian University Technology, Dalian, China, 2020; pp. 20–60. (In Chinese). [Google Scholar]
- Chen, Z.; Liu, Y.; Zhou, P. A comparative study of fractal dimension calculation methods for rough surface profiles. Chaos Solitons Fractals 2018, 112, 24–30. [Google Scholar] [CrossRef]
- Lin, J.; Wu, P.; Dai, H.; Qiu, Y.; Zhang, J. Intelligent optimization of clamping design of PEM fuel cell stack for high consistency and uniformity of contact pressure. Int. J. Green Energy 2022, 19, 95–108. [Google Scholar] [CrossRef]
- Huang, X.; Liu, S.; Yu, X.; Liu, Y.; Zhang, Y.; Xu, G. A mechanism leakage model of metal-bipolar-plate PEMFC seal structures with stress relaxation effects. Int. J. Hydrogen Energy 2022, 47, 2594–2607. [Google Scholar] [CrossRef]
- Li, X.; Yang, Z.; Xu, J.; Chen, R.; Yang, H. The fractal leakage model of contact mechanical seals considering wear and thermal deformation. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 521. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameters | Definition | Values |
|---|---|---|---|
| BPP | TBPP | Thickness (mm) | 18 |
| LBPP | Length (mm) | 100 | |
| WCN | Width of the channel (mm) | 0.75 | |
| DCN | Depth of the channel (mm) | 1.0 | |
| WRIB | Width of the rib (mm) | 1.0 | |
| GDL | TGDL | Thickness (mm) | 0.2 |
| LGDL | Length (mm) | 50 | |
| MEA | TMEA | Thickness (mm) | 0.05 |
| LMEA | Length (mm) | 50 | |
| GASKET | TGASKET | Thickness (mm) | Rough surface |
| LGASKET | Length (mm) | 2 |
| Component | Material | Young’s Modulus (MPa) | Poisson’s Ratio |
|---|---|---|---|
| BPP | Graphite | 134,100 | 0.25 |
| GDL | Carbon | 11.67 | 0.01 |
| MEA | —— | 116 | 0.48 |
| GASKET | PTFE | 2.65 | 0.48 |
| PEN | Polyethylene naphthalate | 1184 | 0.3 |
| Parameters | Experimental Value | Simulation Value | Relative Error |
|---|---|---|---|
| Rq/(mm) | 2.24 × 10−4 | 2.09 × 10−4 | 6.7% |
| D | 1.829 | 1.801 | 1.53% |
| G | 2.98 × 10−7 | 2.83 × 10−7 | 5.03% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, B.; Han, K.; Wang, Y.; Li, X. Analysis and Experimental Verification of the Sealing Performance of PEM Fuel Cell Based on Fractal Theory. Fractal Fract. 2023, 7, 401. https://doi.org/10.3390/fractalfract7050401
Lv B, Han K, Wang Y, Li X. Analysis and Experimental Verification of the Sealing Performance of PEM Fuel Cell Based on Fractal Theory. Fractal and Fractional. 2023; 7(5):401. https://doi.org/10.3390/fractalfract7050401
Chicago/Turabian StyleLv, Bao, Kai Han, Yongzhen Wang, and Xiaolong Li. 2023. "Analysis and Experimental Verification of the Sealing Performance of PEM Fuel Cell Based on Fractal Theory" Fractal and Fractional 7, no. 5: 401. https://doi.org/10.3390/fractalfract7050401