
Fractional-Order Nonlinear Multi-Agent Systems: A Resilience-Based Approach to Consensus Analysis with Distributed and Input Delays

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The parameters of controllers and multi-agent systems are co-designed based on the model of nonlinear MASs. Compared with published results, the obtained fractional-order controller is resilient to uncertainties.
- (2)
- The majority of the results mentioned in previous related references [24,25,26,27,28] deals with the assumptions that the nonlinear part as . However, the remainder of the nonlinear term in the system dynamics model is not negligible and cannot be completely canceled. Since and in many cases, it should be well addressed in the design of the controller. Furthermore, in the abovementioned references, it is assumed that the controllers derived by these techniques are precise, accurate and exactly implemented, but this is not always appropriate as it is difficult to have exact dynamics of the system. Therefore, in this paper, we consider both the effect of uncertainty in the controller and the nonvanishing nonlinearity in multi-agent dynamic systems to enhance the implementation of the controller.
2. Preliminaries
3. Leader-Following Consensus
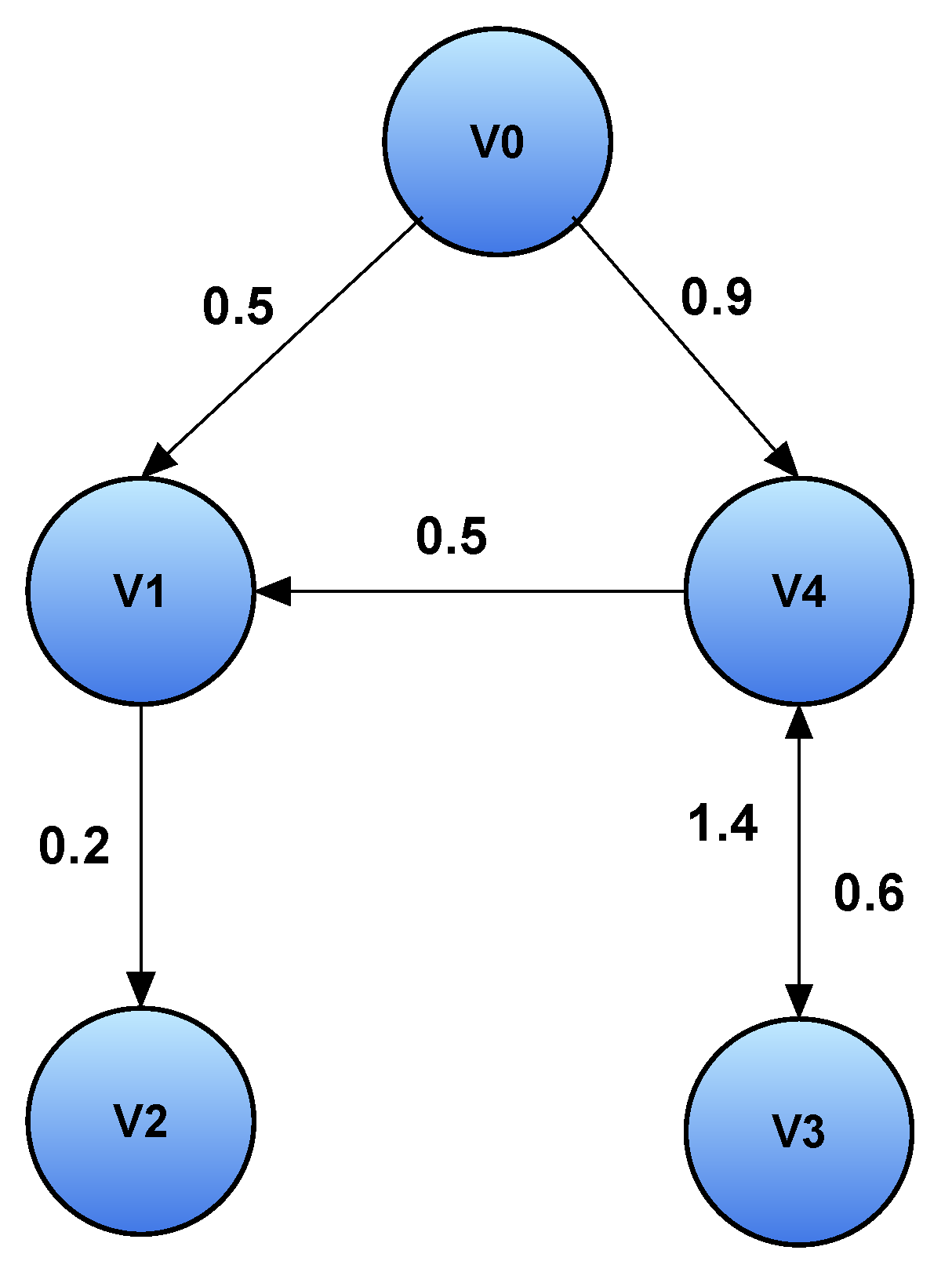
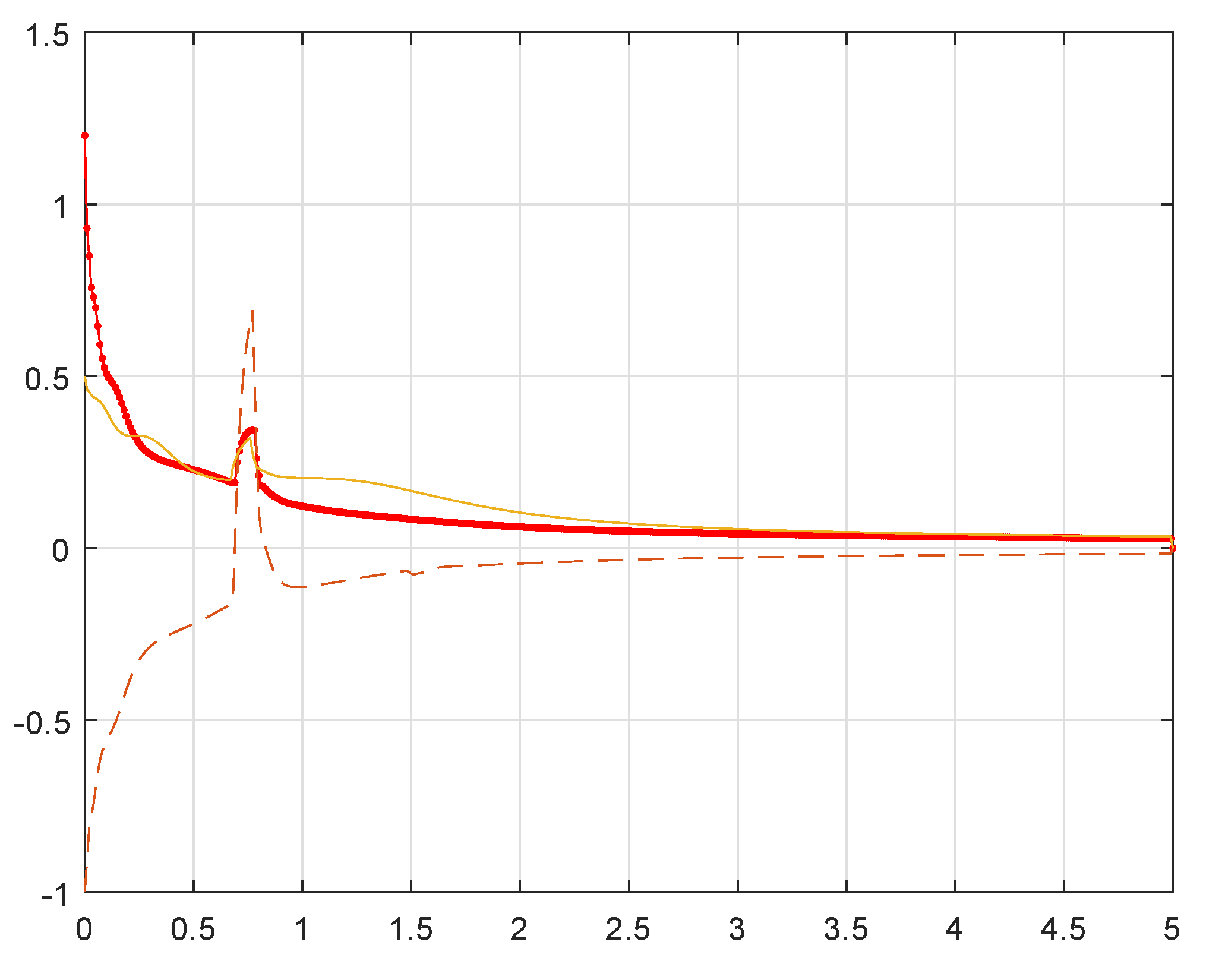
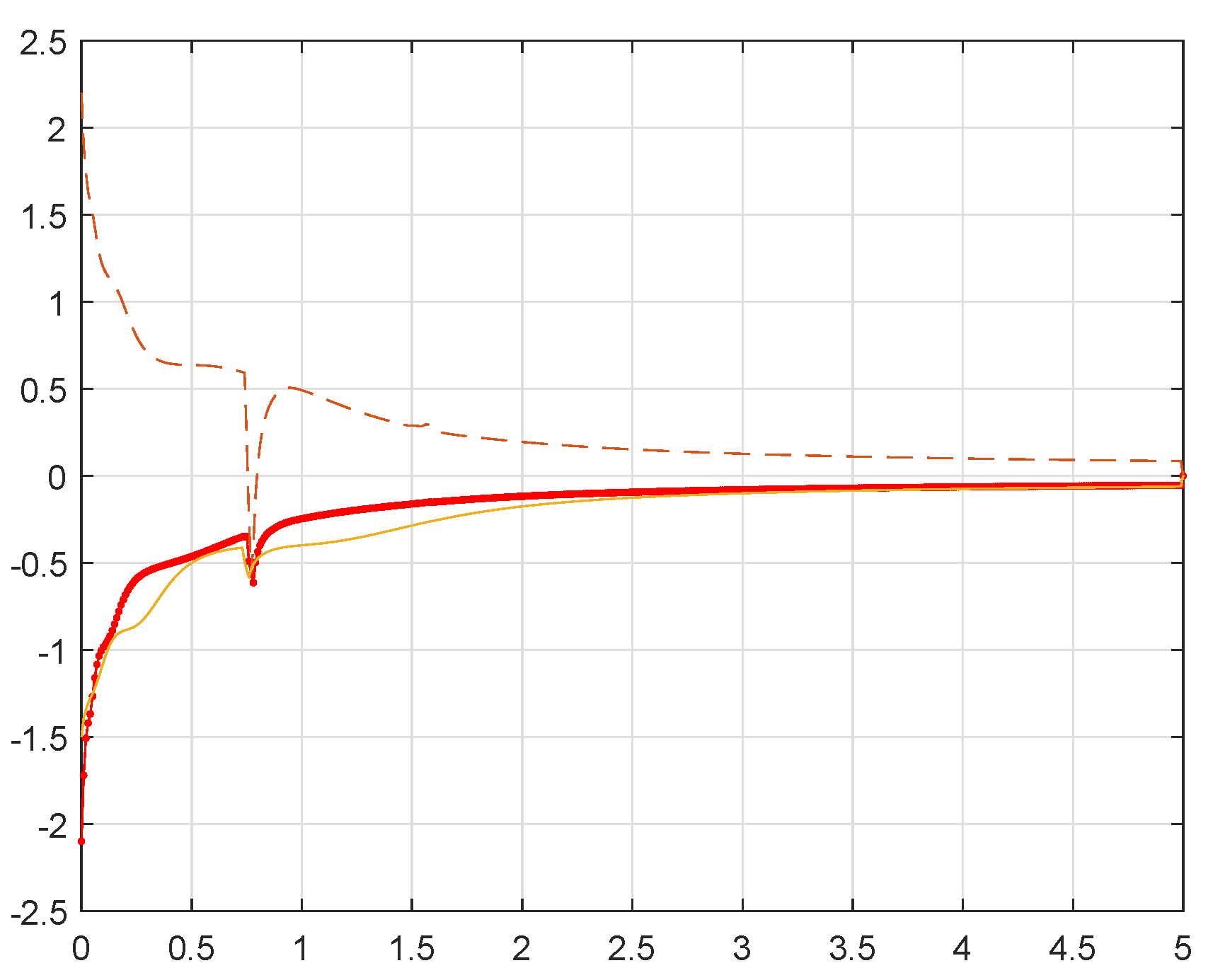
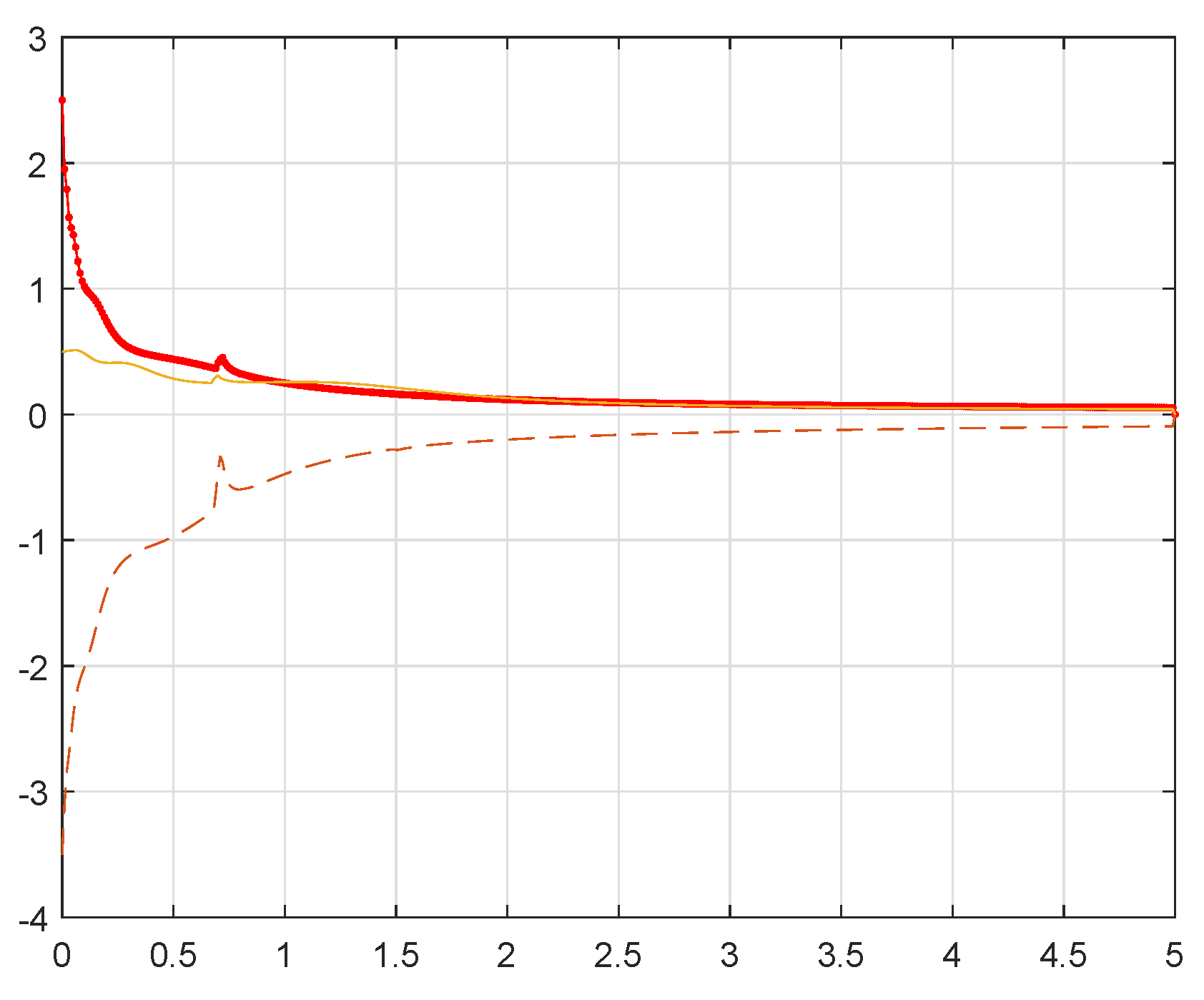
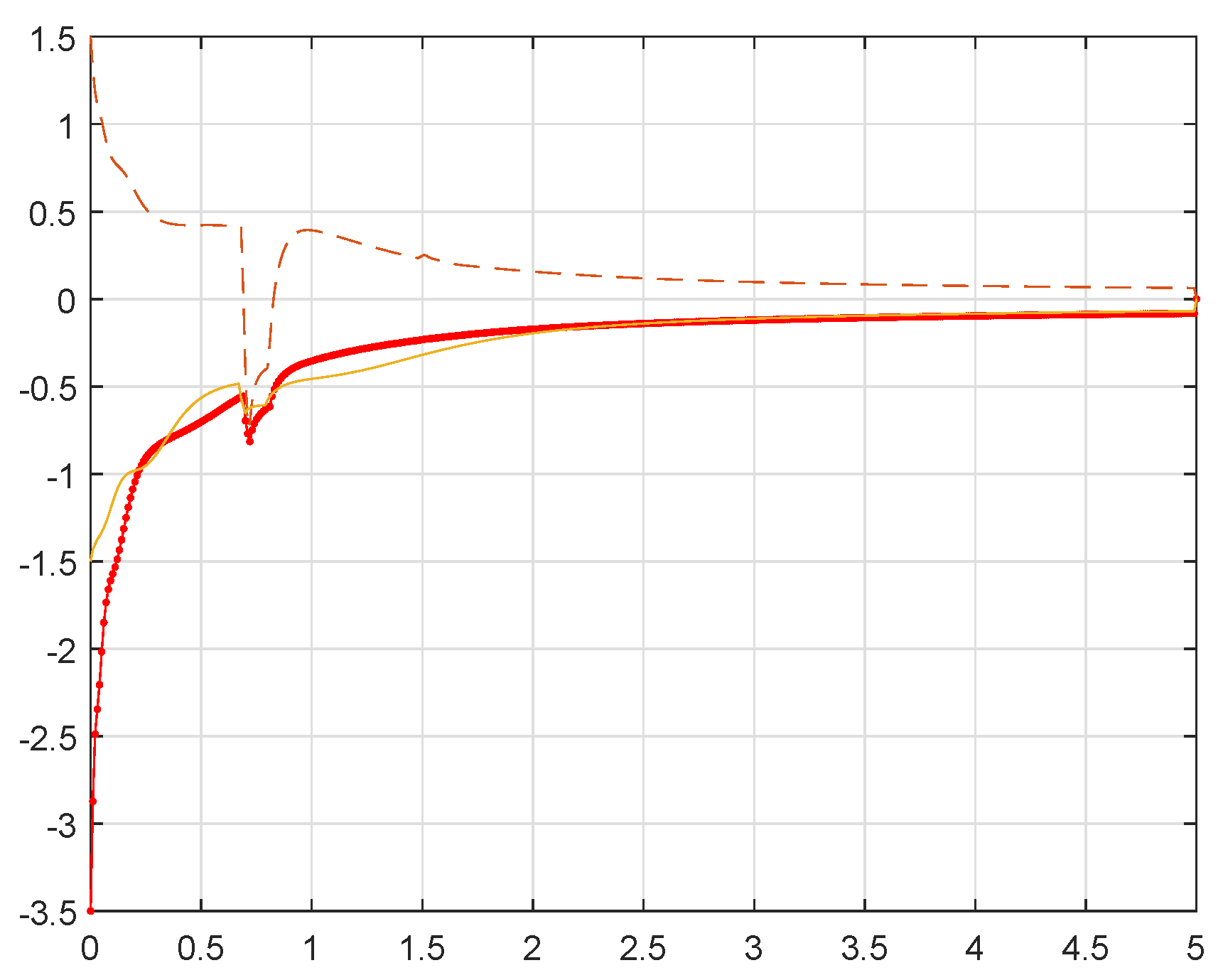
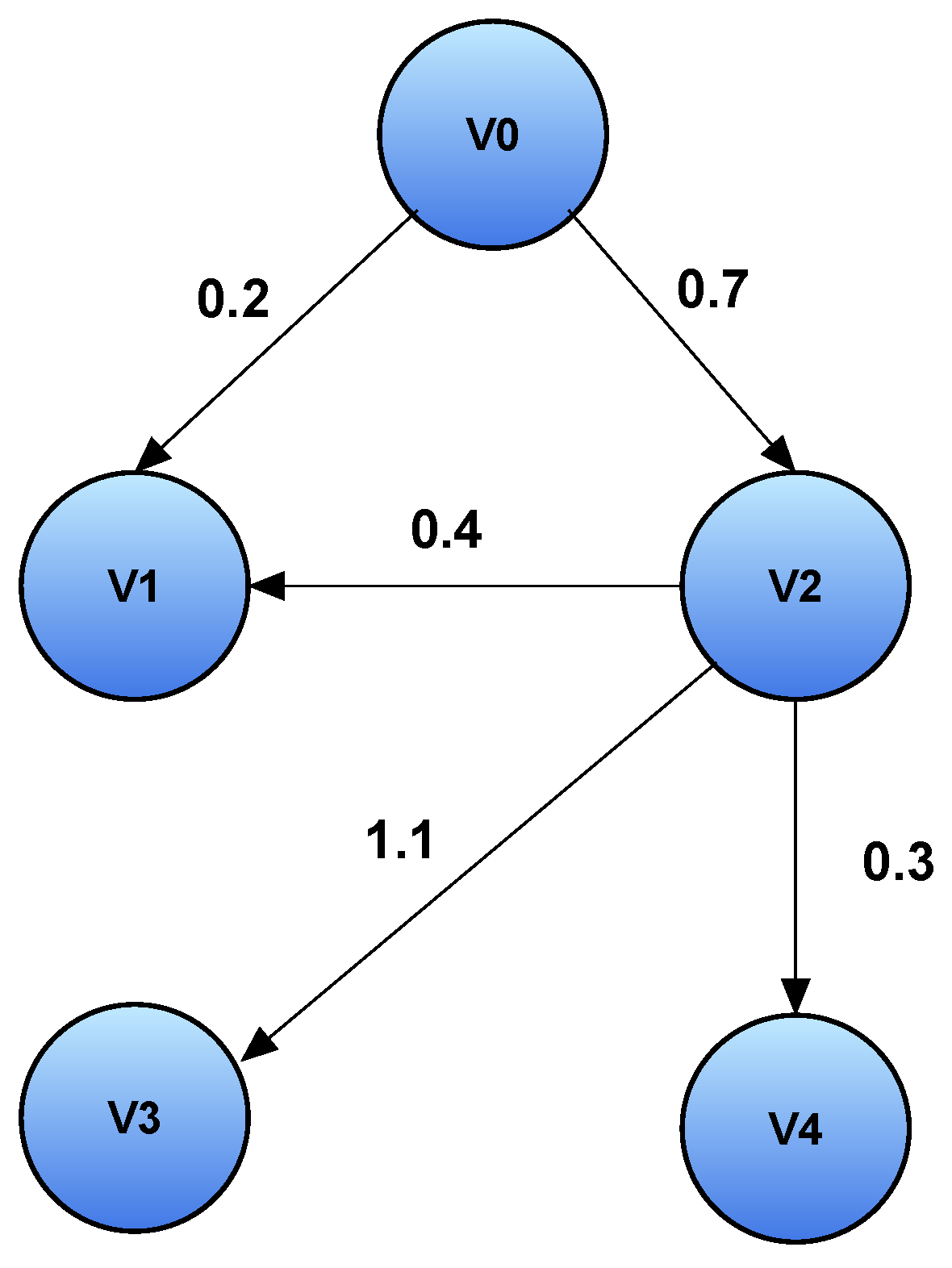
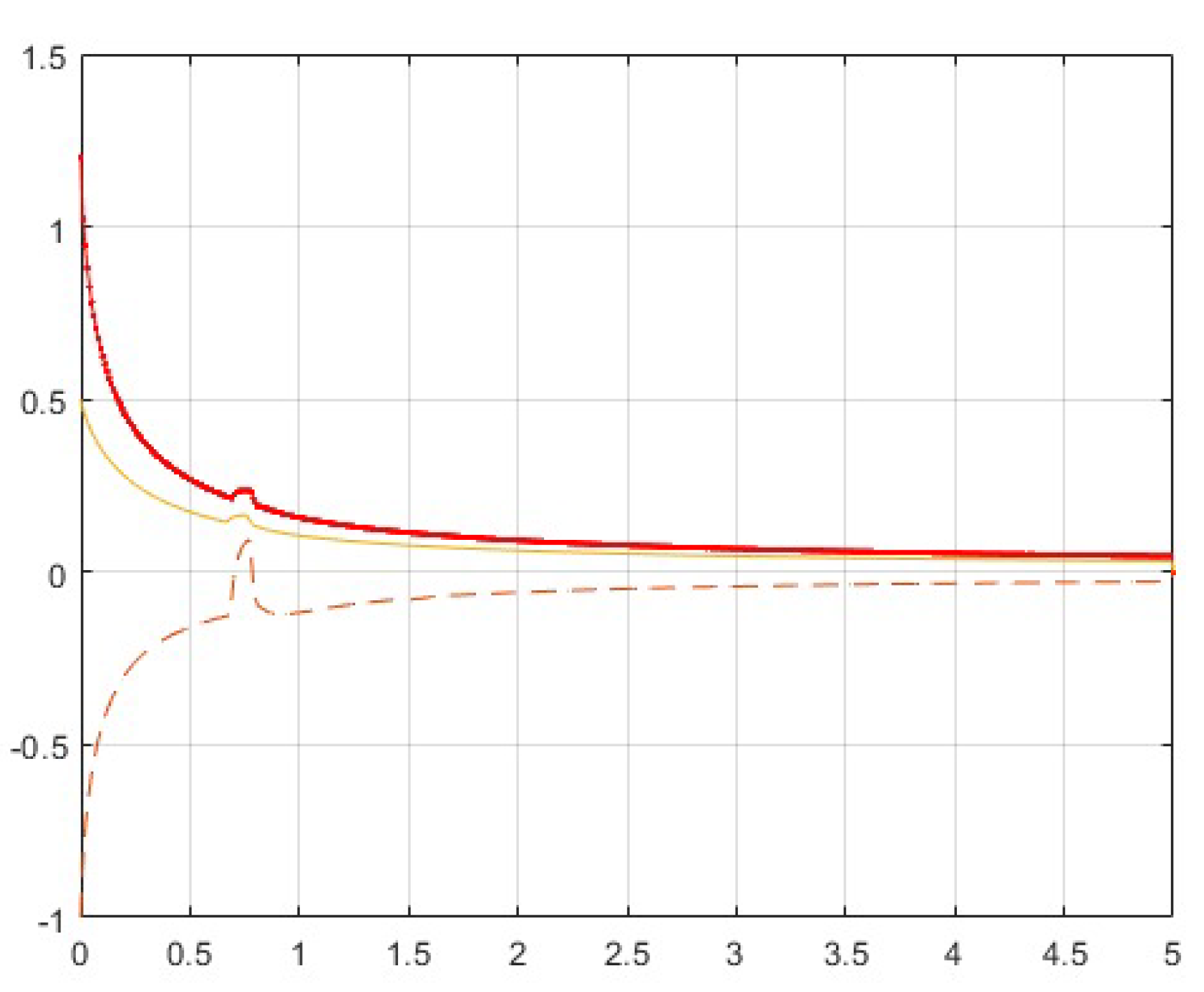
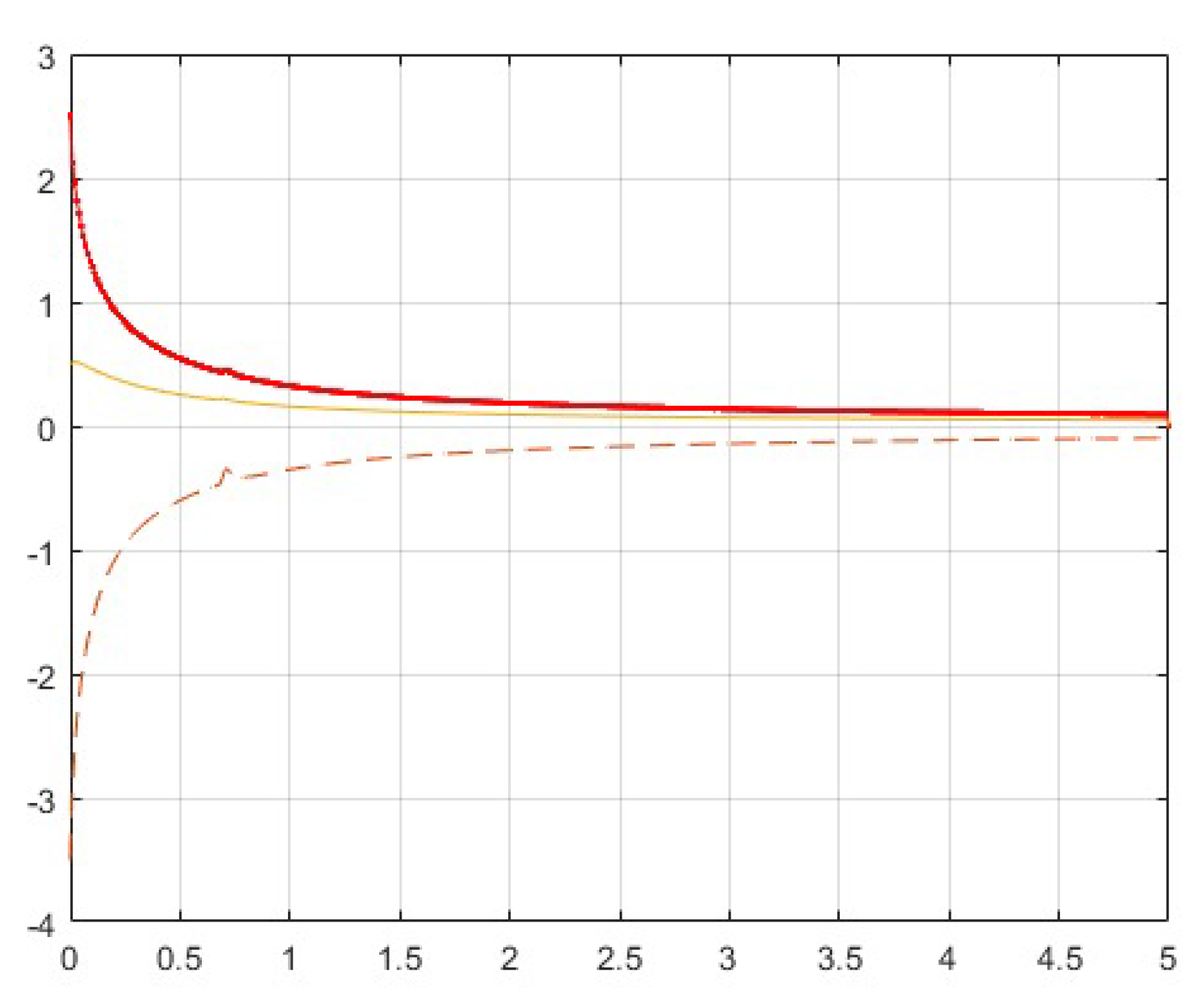
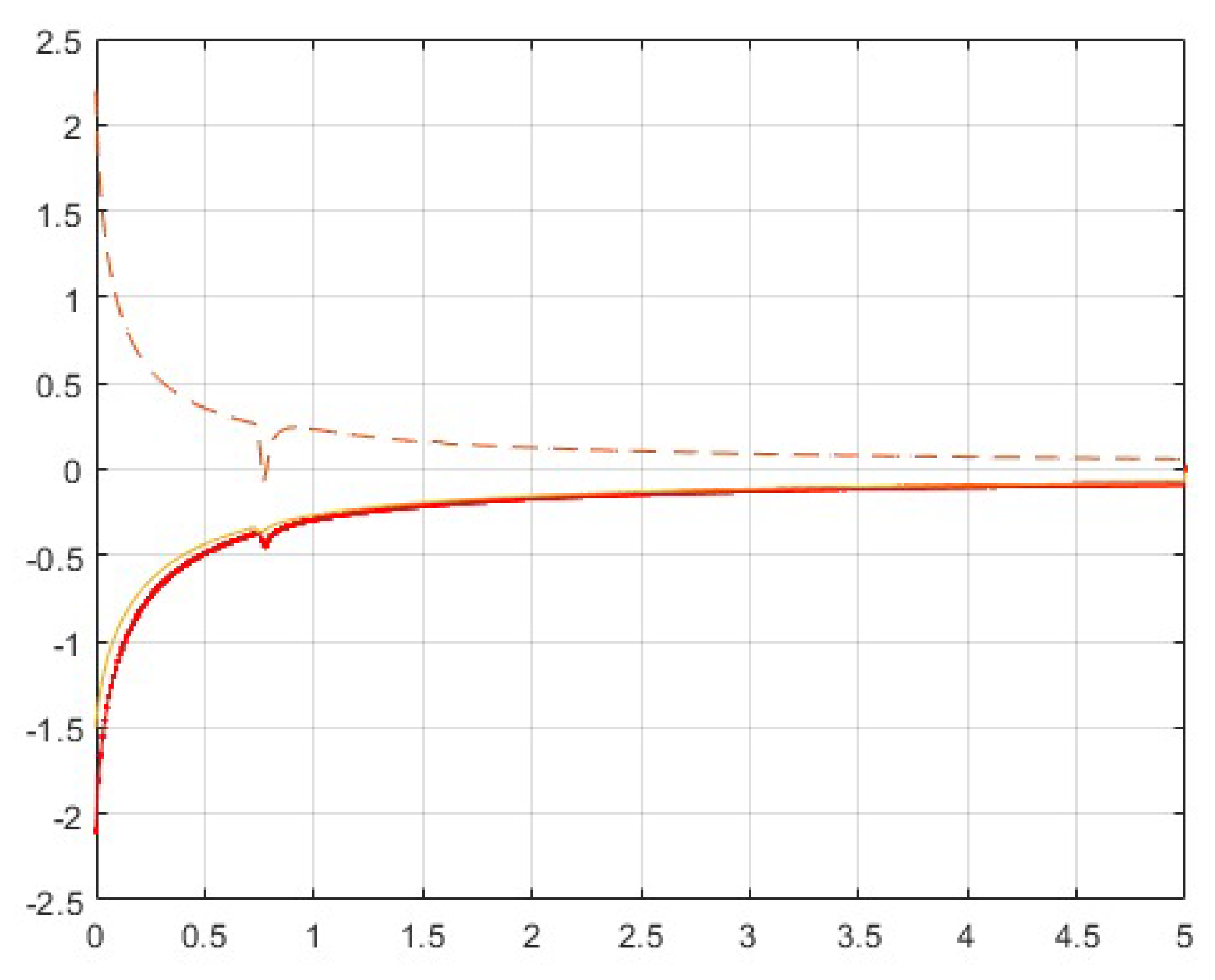
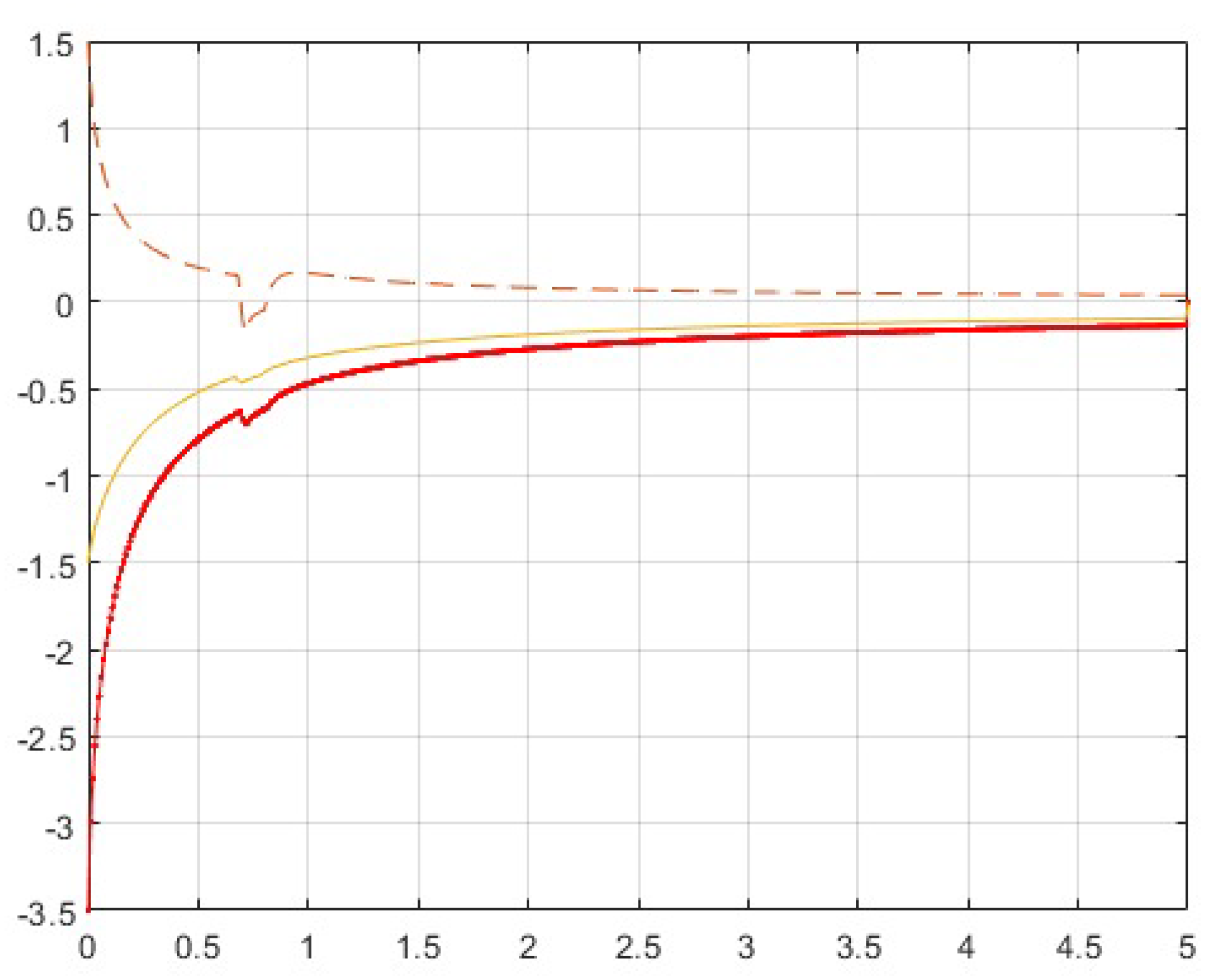
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wei, R.; Beard, R. Distributed Consensus in Multi-Vehicle Cooperative Control: Theory and Applications; Springer: London, UK, 2008. [Google Scholar]
- Carpenter, J. Decentralized control of sattellite formations. Int. J. Robust Nonlinear Control 2002, 12, 141–161. [Google Scholar] [CrossRef]
- Zhu, W.; Jiang, Z.P. Event-based-following consensus of multi-agent systems with input time delay. IEEE Trans. Autom. Control 2015, 60, 1362–1367. [Google Scholar] [CrossRef]
- Liu, L.; Shan, J. Event-triggered consensus of nonlinear multi-agent systems with stochastic switching topology. J. Frankl. Inst. 2017, 354, 5350–5373. [Google Scholar] [CrossRef]
- Wu, J.; Li, H.; Chen, X. Leader-following consensus of nonlinear discrete-time multi-agent systems with limited communication channel capacity. J. Frankl. Inst. 2017, 354, 4179–4195. [Google Scholar] [CrossRef]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Yang, R.; Liu, S.; Tan, Y.; Zhang, Y.; Jiang, W. Consensus analysis of fractional-order nonlinear multi-agent systems with distributed and input delays. Neurocomputing 2019, 329, 46–52. [Google Scholar] [CrossRef]
- Gong, P. Distributed consensus of nonlinear fractional-order multi-agent systems with directed topologies. IET Control Theory Appl. 2016, 10, 2515–2525. [Google Scholar] [CrossRef]
- Zhu, W.; Li, W.; Zhou, P.; Yang, C. Consensus of fractional-order multi-agent systems with linear models via oberver-type protocol. Neurocomputing 2017, 230, 60–65. [Google Scholar] [CrossRef]
- Ren, G.; Yu, Y. Robust consensus of fractional multi-agent systems with external disturbances. Neurocomputing 2016, 218, 339–345. [Google Scholar] [CrossRef]
- Yu, H.; Xia, X. Adaptive leaderless consensus of agents in jointly connected networks. Neurocomputing 2017, 241, 64–70. [Google Scholar] [CrossRef] [Green Version]
- Bai, J.; Wen, G.; Rahmani, A.; Yu, Y. Consensus problem with a reference state for fractional-order multi-agent systems. Asian J. Control 2017, 19, 1009–1018. [Google Scholar] [CrossRef]
- Ma, X.; Sun, F.; Li, H.; He, B. The consensus region design and analysis of fractional-order multi-agent systems. Int. J. Syst. Sci. 2017, 48, 629–636. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, R. Modified projective synchronization of fractional-order chaotic systems with different dimensions. Acta Math. Appl. Sin. Engl. Ser. 2020, 36, 527–538. [Google Scholar] [CrossRef]
- Tian, Y.; Xia, Q.; Chai, Y.; Chen, L.; Lopes, A.; Chen, Y. Guaranteed cost leaderless consensus protocol design for fractional-order uncertain multi-agent systems with state and input delays. Fractal Fract. 2021, 5, 141. [Google Scholar] [CrossRef]
- Qin, J.; Gao, H.; Zheng, W.X. Second-order consensus for multi-agent systems with switching topology and communication delay. Syst. Control Lett. 2011, 60, 390–397. [Google Scholar] [CrossRef]
- Liu, H.; Karimi, H.; Du, S.; Xia, W.; Zhong, C. Leader-following consensus of discrete-time multi-agent systems with time-varying delay based on large delay theory. Inf. Sci. 2017, 417, 236–246. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, H.; Song, X.; Zhang, H. Consensus problems for discrete-time agents with communication delay. Int. J. Control Autom. Syst. 2017, 15, 1515–1523. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Yu, Z.; Jiang, H.; Hu, C. Leader-following consensus of fractional-order multi-agent systems under fixed topology. Neurocomputing 2015, 149, 613–620. [Google Scholar] [CrossRef]
- Bia, J.; Wen, G.; Rahmani, A.; Yu, Y. Distributed consensus tracking for the fractional-order multi-agent systems based on the sliding mode control method. Neurocomputing 2017, 235, 210–216. [Google Scholar]
- Xu, Q.; Zhuang, S.; Che, C.; Xia, Y. stabalization of a class of fractional-order nonautonomous systems using quadratic Lyapunov functions. Adv. Differ. Equ. 2018, 2018, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q.; Xu, X.; Zhuang, S.; Xiao, J.; Che, C. New complex projective synchronization strategies for derive -response networks with fractional-complex variable dynamics. Appl. Math. Comput. 2018, 338, 552–566. [Google Scholar]
- Liu, X.; Zhang, Z.; Li, X. Consensus control of fractional-order systems based on delayed state fractional order derivative. Asian J. Control 2017, 19, 2199–2210. [Google Scholar] [CrossRef]
- Liu, J.; Qin, K.; Chen, W.; Li, P.; Shi, M. Consensus of fractional-order multi-agent systems with nonuniform time delays. Math. Probl. Eng. 2018, 2018, 2850757. [Google Scholar]
- Shen, J.; Cao, J.; Lu, J. Consensus of fractional-order systems with non-nuniform input and communication delays. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2012, 226, 271–283. [Google Scholar] [CrossRef]
- Shen, J.; Cao, J. Necessary and sufficient conditions for consensus of delayed fractional-order systems. Asian J. Control 2012, 14, 1690–1697. [Google Scholar] [CrossRef]
- Liu, S.; Wu, X.; Zhou, X.; Jiang, W. Asymptotical stability of Riemann-Liouville fractional nonlinear systems. Nonlinear Dyn. 2016, 86, 65–71. [Google Scholar] [CrossRef]
- Liu, S.; Zhou, X.; Li, X.; Jiang, W. Asymptotical stability of Riemann-Liouville fractional singular systems with multiple time-varying delays. Appl. Math. Lett. 2017, 65, 32–39. [Google Scholar] [CrossRef]
- Liu, S.; Wu, X.; Zhang, Y.; Yang, R. Asymptotical stability of Riemann-Liouville fractional neutral systems. Appl. Math. Lett. 2017, 69, 168–173. [Google Scholar] [CrossRef]
- Xu, Q.; Zhuang, S.; Liu, S.; Xiao, J. Decentralized adaptive coupling synchronization of fractional-order complex-variable dynamical networks. Neurocomputing 2016, 186, 119–216. [Google Scholar] [CrossRef]
- Wang, F.; Yang, Y. Leader-following exponential consensus of fractional-order nonlinear multi-agents system with hybrid time-varying delay: A heterogenous impulsive method. Phys. A 2017, 482, 158–172. [Google Scholar] [CrossRef]
- Zhu, W.; Chen, B.; Yang, J. Consensus of fractional-order multi-agent systems with input time delay. Fract. Calc. Appl. Anal. 2017, 20, 52–70. [Google Scholar] [CrossRef]
- Yu, W.; Wen, G.; Chen, G.; Cao, J. Distributed Cooperative Control of Multi-Agent Systems; Higher Education Press: Beijing, China, 2016. [Google Scholar]
- DeLellis, P.; di Bernardo, M.; Russo, G. On QUAD, Lipschitz, and contracting vector fields for consensus and synchronization of networks. IEEE Trans. Circuits Syst. I 2011, 58, 576–583. [Google Scholar] [CrossRef]
- Gu, K.; Kharitonov, V.; Chen, J. Stability of Time-Delay Systems; Birkhauser: Boston, MA, USA, 2022. [Google Scholar]
- Duarte-Mermoud, M.; Aguila-Camacho, N.; Gallegos, J. Castro-Linares, Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Wen, Y.; Zhou, X.; Zhang, Z.; Liu, S. Lyapunov method for nonlinear fractional differential systems with delay. Nonlinear Dyn. 2015, 82, 1015–1025. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Lu, Q.; Leng, G. Concise Tutorial of Matrix Theory; Science Press: Beijing, China, 2001. (In Chinese) [Google Scholar]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, A.; Niazi, A.U.K.; Abbasi, W.; Awan, F.; Khan, A. Fractional-Order Nonlinear Multi-Agent Systems: A Resilience-Based Approach to Consensus Analysis with Distributed and Input Delays. Fractal Fract. 2023, 7, 322. https://doi.org/10.3390/fractalfract7040322
Khan A, Niazi AUK, Abbasi W, Awan F, Khan A. Fractional-Order Nonlinear Multi-Agent Systems: A Resilience-Based Approach to Consensus Analysis with Distributed and Input Delays. Fractal and Fractional. 2023; 7(4):322. https://doi.org/10.3390/fractalfract7040322
Chicago/Turabian StyleKhan, Asad, Azmat Ullah Khan Niazi, Waseem Abbasi, Faryal Awan, and Anam Khan. 2023. "Fractional-Order Nonlinear Multi-Agent Systems: A Resilience-Based Approach to Consensus Analysis with Distributed and Input Delays" Fractal and Fractional 7, no. 4: 322. https://doi.org/10.3390/fractalfract7040322