

Euler Wavelet Method as a Numerical Approach for the Solution of Nonlinear Systems of Fractional Differential Equations
Abstract
:1. Introduction
2. Fundamentals of the Fractional Calculus
3. Euler Wavelets and Derivation of Operational Matrices for Euler Wavelets
3.1. Euler Wavelets
3.2. Function Approximation
3.3. Euler Wavelet Operational Matrix of Fractional Integration
Block Pulse Functions
4. Numerical Examples
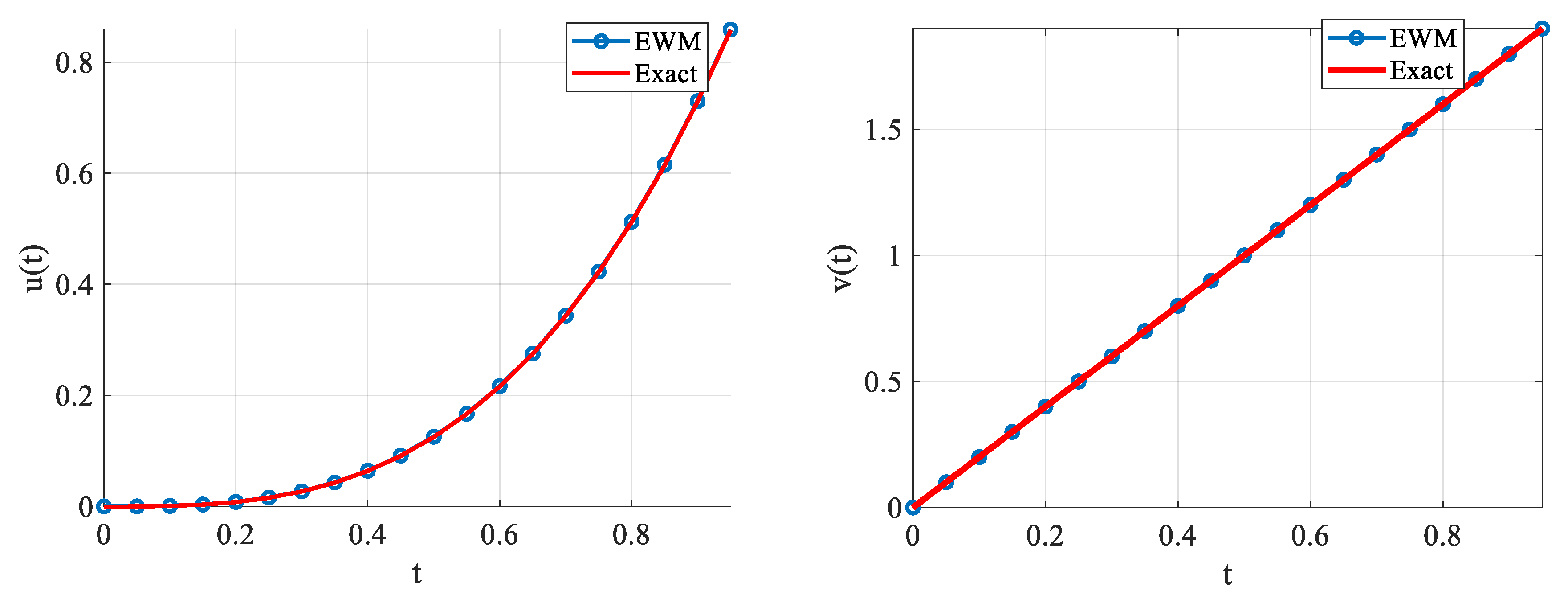
4.1. Example 1
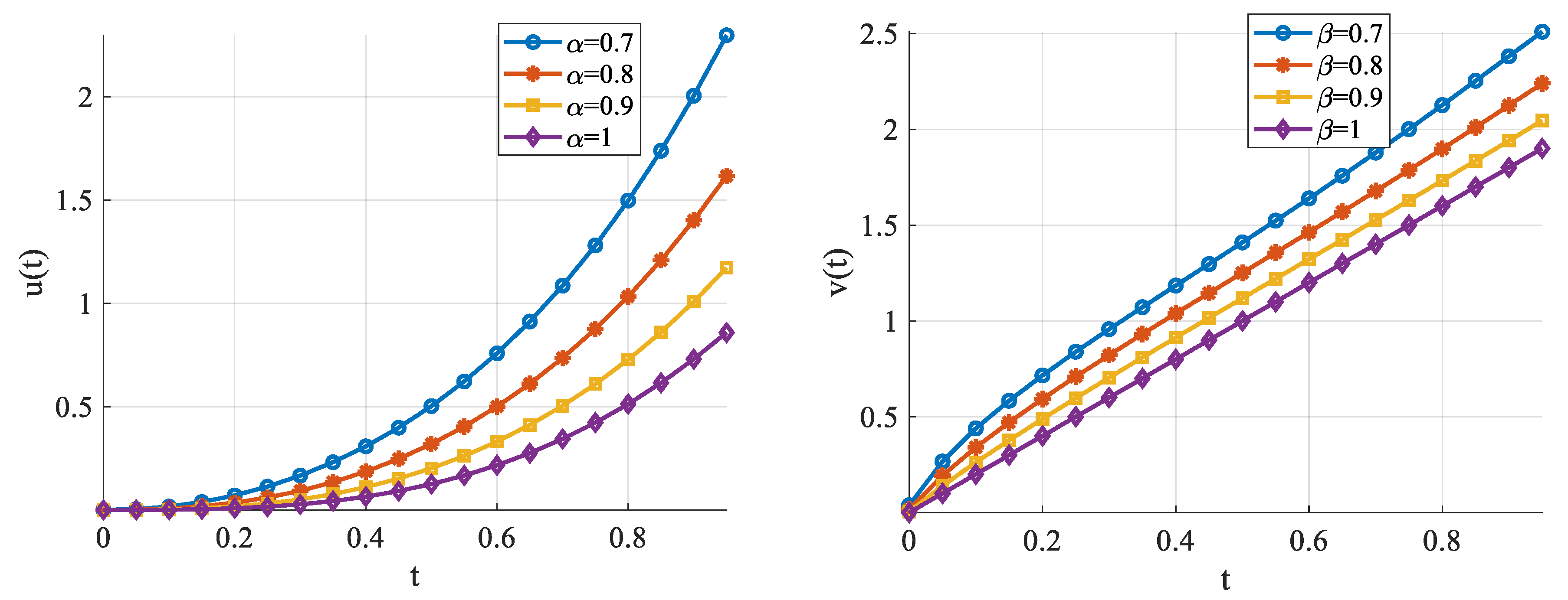
4.2. Example 2
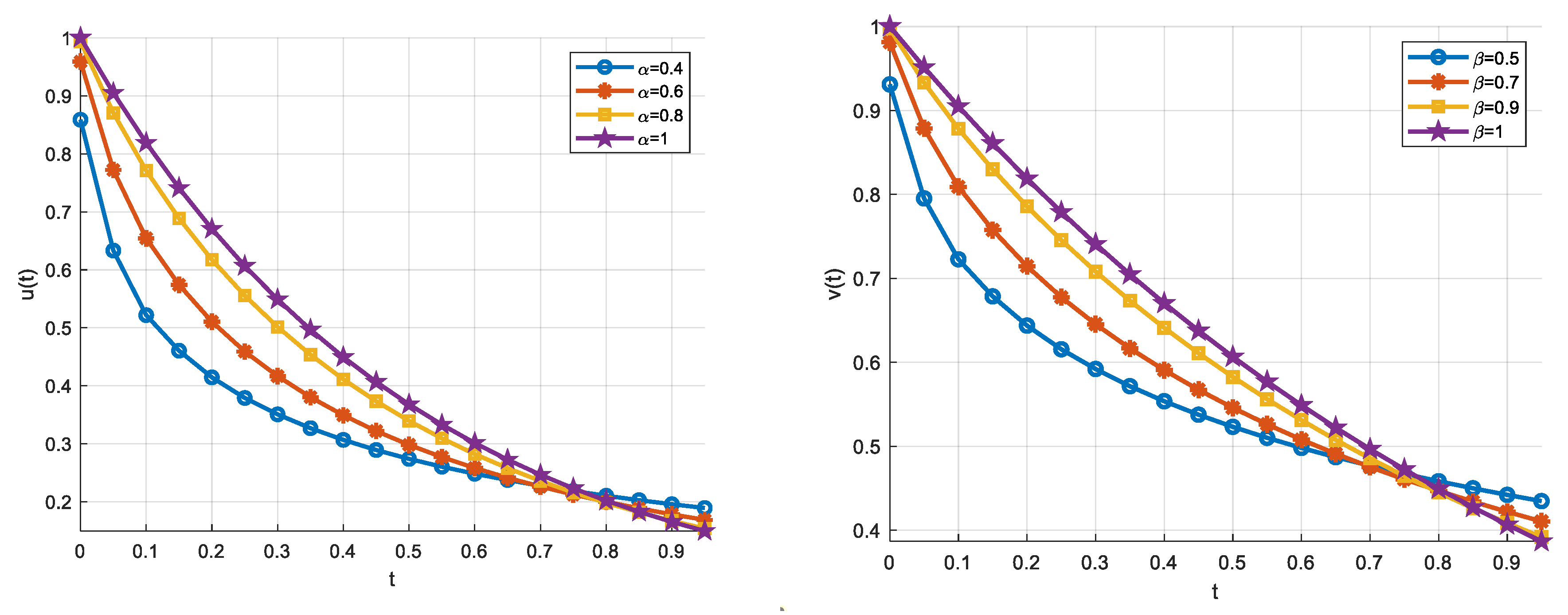
4.3. Example 3
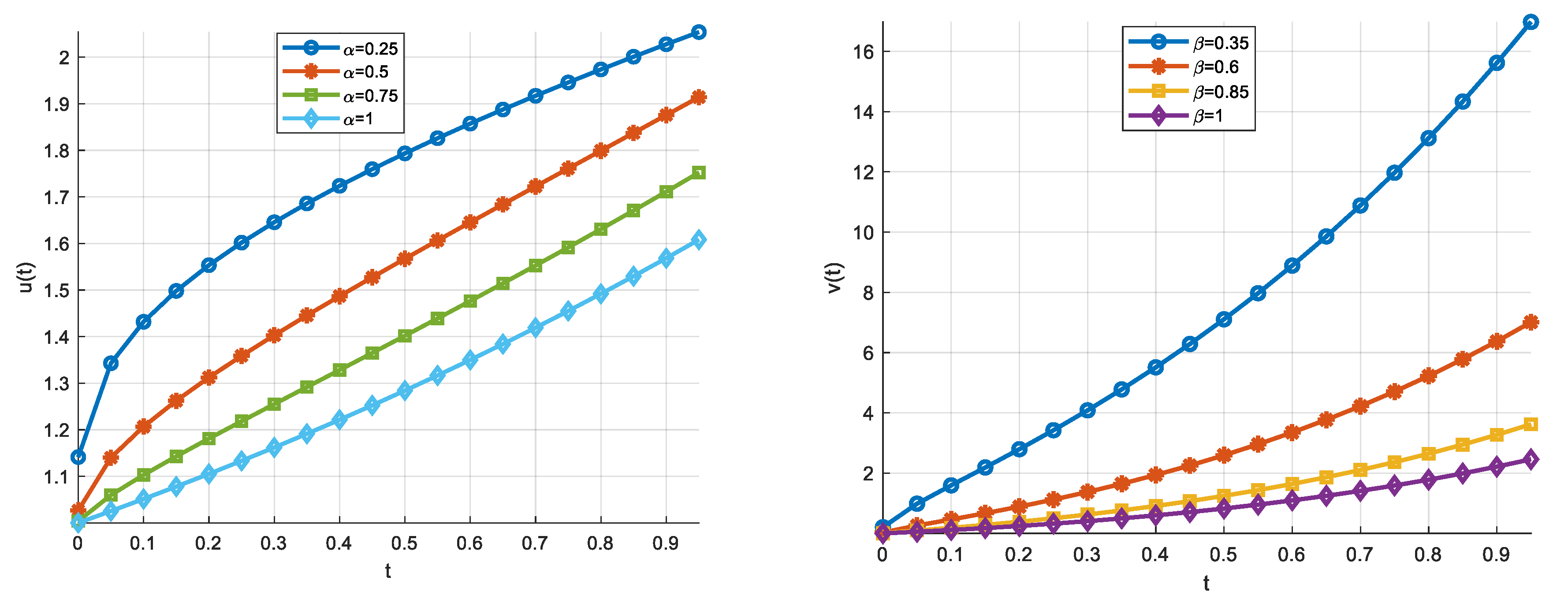
4.4. Example 4
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Beyer, H.; Kempfle, S. Definition of physically consistent damping laws with fractional derivatives. ZAMM J. Appl. Math. Mech. 1995, 75, 623–635. [Google Scholar] [CrossRef]
- Carpinteri, A.; Mainardi, F. (Eds.) Fractals and Fractional Calculus in Continuum Mechanics; Springer: Berlin/Heidelberg, Germany, 2014; Volume 378. [Google Scholar]
- Hilfer, R. (Ed.) Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Magin, R. Fractional calculus in bioengineering, part 1. Crit. Rev. Biomed. Eng. 2004, 32, 1–104. [Google Scholar] [CrossRef] [Green Version]
- Mainardi, F. Fractional Calculus: Some Basic Problems in Continuum and Statistical Mechanics; Springer: Vienna, Austria, 1997; pp. 291–348. [Google Scholar]
- Li, C.; Chen, G. Chaos in the fractional order Chen system and its control. Chaos Solitons Fractals 2004, 22, 549–554. [Google Scholar] [CrossRef]
- Almeida, R.; Bastos, N.R.; Monteiro, M.T.T. Modeling some real phenomena by fractional differential equations. Math. Methods Appl. Sci. 2016, 39, 4846–4855. [Google Scholar] [CrossRef] [Green Version]
- Parovik, R. Mathematical modeling of linear fractional oscillators. Mathematics 2020, 8, 1879. [Google Scholar] [CrossRef]
- Rekhviashvili, S.; Pskhu, A.; Agarwal, P.; Jain, S. Application of the fractional oscillator model to describe damped vibrations. Turk. J. Phys. 2019, 43, 236–242. [Google Scholar] [CrossRef]
- Alsaedi, A.; Nieto, J.J.; Venktesh, V. Fractional electrical circuits. Adv. Mech. Eng. 2015, 7, 1687814015618127. [Google Scholar] [CrossRef]
- Pilipovic, S.; Atanackovic, T.M.; Stankovic, B.; Zorica, D. Fractional Calculus with Applications in Mechanics: Vibrations and Diffusion Processes; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Pskhu, A.; Rekhviashvili, S. Fractional Diffusion–Wave Equation with Application in Electrodynamics. Mathematics 2020, 8, 2086. [Google Scholar] [CrossRef]
- Kim, V.; Parovik, R. Mathematical model of fractional duffing oscillator with variable memory. Mathematics 2020, 8, 2063. [Google Scholar] [CrossRef]
- Ghanbari, B. A new model for investigating the transmission of infectious diseases in a prey-predator system using a non-singular fractional derivative. Math. Methods Appl. Sci. 2021, 1–20. [Google Scholar] [CrossRef]
- Sabatier, J.A.T.M.J.; Agrawal, O.P.; Machado, J.T. Advances in Fractional Calculus; Springer: Dordrecht, The Netherlands, 2007; Volume 4. [Google Scholar]
- Majeed, A.; Kamran, M.; Rafique, M. An approximation to the solution of time fractional modified Burgers’ equation using extended cubic B-spline method. Comput. Appl. Math. 2020, 39, 257. [Google Scholar] [CrossRef]
- Pedas, A.; Tamme, E. Spline collocation method for integro-differential equations with weakly singular kernels. J. Comput. Appl. Math. 2006, 197, 253–269. [Google Scholar] [CrossRef] [Green Version]
- Yi, M.; Huang, J.; Wei, J. Block pulse operational matrix method for solving fractional partial differential equation. Appl. Math. Comput. 2013, 221, 121–131. [Google Scholar] [CrossRef]
- Gupta, S.; Kumar, D.; Singh, J. Numerical study for systems of fractional differential equations via Laplace transform. J. Egypt. Math. Soc. 2015, 23, 256–262. [Google Scholar] [CrossRef] [Green Version]
- Ibraheem, G.H.; Turkyilmazoglu, M.; Al-Jawary, M.A. Novel approximate solution for fractional differential equations by the optimal variational iteration method. J. Comput. Sci. 2022, 64, 101841. [Google Scholar] [CrossRef]
- Vargas, A.M. Finite difference method for solving fractional differential equations at irregular meshes. Math. Comput. Simul. 2022, 193, 204–216. [Google Scholar] [CrossRef]
- Wanassi, O.K.; Bourguiba, R.; Torres, D.F. Existence and uniqueness of solution for fractional differential equations with integral boundary conditions and the Adomian decomposition method. Math. Methods Appl. Sci. 2022, 1–14. [Google Scholar] [CrossRef]
- Azhar, N.; Iqbal, S. Solution of fuzzy fractional order differential equations by fractional Mellin transform method. J. Comput. Appl. Math. 2022, 400, 113727. [Google Scholar] [CrossRef]
- Nadeem, M.; He, J.H. The homotopy perturbation method for fractional differential equations: Part 2, two-scale transform. Int. J. Numer. Methods Heat Fluid Flow 2022, 32, 559–567. [Google Scholar] [CrossRef]
- Beghami, W.; Maayah, B.; Bushnaq, S.; Abu Arqub, O. The Laplace optimized decomposition method for solving systems of partial differential equations of fractional order. Int. J. Appl. Comput. Math. 2022, 8, 52. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
- Ghazanfari, B.; Ghazanfari, A.G. Solving system of fractional differential equations by fractional complex transform method. Asian J. Appl. Sci 2012, 5, 438–444. [Google Scholar] [CrossRef]
- Khader, M.M.; El Danaf, T.S.; Hendy, A.S. A computational matrix method for solving systems of high order fractional differential equations. Appl. Math. Model. 2013, 37, 4035–4050. [Google Scholar] [CrossRef]
- Saad, K.M.; Khader, M.M.; Gómez-Aguilar, J.F.; Baleanu, D. Numerical solutions of the fractional Fisher’s type equations with Atangana-Baleanu fractional derivative by using spectral collocation methods. Chaos Interdiscip. J. Nonlinear Sci. 2019, 29, 023116. [Google Scholar] [CrossRef] [PubMed]
- Bhrawy, A.H.; Zaky, M.A.; Baleanu, D. New numerical approximations for space-time fractional Burgers’ equations via a Legendre spectral-collocation method. Rom. Rep. Phys 2015, 67, 340–349. [Google Scholar]
- Huang, J.; Tang, Y.; Vázquez, L. Convergence analysis of a block-by-block method for fractional differential equations. Numer. Math. Theory Methods Appl. 2012, 5, 229–241. [Google Scholar] [CrossRef]
- Izadi, M.; Srivastava, H.M. A discretization approach for the nonlinear fractional logistic equation. Entropy 2020, 22, 1328. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, L. Solving nonlinear Volterra integro-differential equations of fractional order by using Euler wavelet method. Adv. Differ. Equ. 2017, 2017, 27. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Wang, C. Recurrence formulae for Apostol-Bernoulli and Apostol-Euler polynomials. Adv. Differ. Equ. 2012, 2012, 209. [Google Scholar] [CrossRef] [Green Version]
- Kilicman, A.; Al Zhour, Z.A.A. Kronecker operational matrices for fractional calculus and some applications. Appl. Math. Comput. 2007, 187, 250–265. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | ||||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 1.09 × 10−3 | 2.51 × 10−6 | 1.36 × 10−4 | 7.85 × 10−8 | 1.70 × 10−5 | 2.45 × 10−9 | 2.12 × 10−6 | 7.67 × 10−11 |
| 0.1 | 1.89 × 10−4 | 2.75 × 10−6 | 9.92 × 10−5 | 6.36 × 10−7 | 2.42 × 10−5 | 1.48 × 10−7 | 5.23 × 10−6 | 3.64 × 10−8 |
| 0.2 | 7.94 × 10−4 | 2.03 × 10−5 | 1.93 × 10−4 | 4.74 × 10−6 | 4.19 × 10−5 | 1.16 × 10−6 | 1.05 × 10−5 | 2.90 × 10−7 |
| 0.3 | 9.47 × 10−4 | 6.46 × 10−5 | 2.42 × 10−4 | 1.57 × 10−5 | 6.69 × 10−5 | 3.91 × 10−6 | 1.66 × 10−5 | 9.75 × 10−7 |
| 0.4 | 1.56 × 10−3 | 1.51 × 10−4 | 3.38 × 10−4 | 3.70 × 10−5 | 8.52 × 10−5 | 9.21 × 10−6 | 2.21 × 10−5 | 2.30 × 10−6 |
| 0.5 | 2.87 × 10−3 | 2.89 × 10−4 | 5.81 × 10−4 | 7.14 × 10−5 | 1.28 × 10−4 | 1.78 × 10−5 | 2.99 × 10−5 | 4.45 × 10−6 |
| 0.6 | 2.04 × 10−3 | 4.88 × 10−4 | 5.60 × 10−4 | 1.21 × 10−4 | 1.39 × 10−4 | 3.03 × 10−5 | 3.40 × 10−5 | 7.56 × 10−6 |
| 0.7 | 2.76 × 10−3 | 7.52 × 10−4 | 6.84 × 10−4 | 1.87 × 10−4 | 1.64 × 10−4 | 4.67 × 10−5 | 4.12 × 10−5 | 1.17 × 10−5 |
| 0.8 | 3.12 × 10−3 | 1.08 × 10−3 | 7.83 × 10−4 | 2.68 × 10−4 | 2.02 × 10−4 | 6.69 × 10−5 | 5.04 × 10−5 | 1.67 × 10−5 |
| 0.9 | 4.05 × 10−3 | 1.44 × 10−3 | 9.57 × 10−4 | 3.60 × 10−4 | 2.40 × 10−4 | 8.99 × 10−5 | 6.07 × 10−5 | 2.25 × 10−5 |
| t | ||||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 6.71 × 10−4 | 7.06 × 10−4 | 3.35 × 10−4 | 1.96 × 10−4 | 1.17 × 10−4 | 5.16 × 10−5 | 3.70 × 10−5 | 1.32 × 10−5 |
| 0.1 | 1.46 × 10−3 | 7.59 × 10−4 | 3.27 × 10−4 | 1.82 × 10−4 | 8.40 × 10−5 | 4.55 × 10−5 | 2.08 × 10−5 | 1.15 × 10−5 |
| 0.2 | 9.32 × 10−4 | 6.03 × 10−4 | 2.45 × 10−4 | 1.52 × 10−4 | 6.32 × 10−5 | 3.88 × 10−5 | 1.60 × 10−5 | 9.68 × 10−6 |
| 0.3 | 8.05 × 10−4 | 5.27 × 10−4 | 1.97 × 10−4 | 1.31 × 10−4 | 4.68 × 10−5 | 3.20 × 10−5 | 1.17 × 10−5 | 8.01 × 10−6 |
| 0.4 | 5.01 × 10−4 | 4.10 × 10−4 | 1.44 × 10−4 | 1.08 × 10−4 | 3.70 × 10−5 | 2.70 × 10−5 | 8.81 × 10−6 | 6.65 × 10−6 |
| 0.5 | 8.53 × 10−5 | 2.51 × 10−4 | 6.64 × 10−5 | 7.47 × 10−5 | 1.89 × 10−5 | 2.03 × 10−5 | 5.62 × 10−6 | 5.28 × 10−6 |
| 0.6 | 3.51 × 10−4 | 3.00 × 10−4 | 7.60 × 10−5 | 7.03 × 10−5 | 1.86 × 10−5 | 1.76 × 10−5 | 4.96 × 10−6 | 4.49 × 10−6 |
| 0.7 | 2.08 × 10−4 | 2.21 × 10−4 | 5.39 × 10−5 | 5.58 × 10−5 | 1.47 × 10−5 | 1.45 × 10−5 | 3.66 × 10−6 | 3.62 × 10−6 |
| 0.8 | 1.70 × 10−4 | 1.89 × 10−4 | 4.34 × 10−5 | 4.70 × 10−5 | 9.75 × 10−6 | 1.13 × 10−5 | 2.46 × 10−6 | 2.82 × 10−6 |
| 0.9 | 9.89 × 10−5 | 1.30 × 10−4 | 2.94 × 10−5 | 3.61 × 10−5 | 7.67 × 10−6 | 8.98 × 10−6 | 1.74 × 10−6 | 2.19 × 10−6 |
| t | Exact Solution | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1.0000 | 0.0000 | 1.0001 | 0.0005 | 1.0000 | 0.0001 | 1.0000 | 0.0000 | 1.0000 | 0.0000 |
| 0.1 | 1.0513 | 0.1105 | 1.0513 | 0.1111 | 1.0513 | 0.1107 | 1.0513 | 0.1106 | 1.0513 | 0.1105 |
| 0.2 | 1.1052 | 0.2443 | 1.1052 | 0.2450 | 1.1052 | 0.2444 | 1.1052 | 0.2443 | 1.1052 | 0.2443 |
| 0.3 | 1.1618 | 0.4050 | 1.1619 | 0.4058 | 1.1619 | 0.4052 | 1.1618 | 0.4050 | 1.1618 | 0.4050 |
| 0.4 | 1.2214 | 0.5967 | 1.2215 | 0.5977 | 1.2214 | 0.5970 | 1.2214 | 0.5968 | 1.2214 | 0.5967 |
| 0.5 | 1.2840 | 0.8244 | 1.2841 | 0.8257 | 1.2840 | 0.8247 | 1.2840 | 0.8244 | 1.2840 | 0.8244 |
| 0.6 | 1.3499 | 1.0933 | 1.3499 | 1.0947 | 1.3499 | 1.0936 | 1.3499 | 1.0934 | 1.3499 | 1.0933 |
| 0.7 | 1.4191 | 1.4096 | 1.4192 | 1.4114 | 1.4191 | 1.4101 | 1.4191 | 1.4097 | 1.4191 | 1.4097 |
| 0.8 | 1.4918 | 1.7804 | 1.4919 | 1.7825 | 1.4919 | 1.7810 | 1.4918 | 1.7806 | 1.4918 | 1.7805 |
| 0.9 | 1.5683 | 2.2136 | 1.5684 | 2.2161 | 1.5683 | 2.2143 | 1.5683 | 2.2138 | 1.5683 | 2.2137 |
| t | ||||||
|---|---|---|---|---|---|---|
| 0 | 5.72 × 10−5 | 2.41 × 10−4 | 5.70 × 10−4 | 1.39 × 10−5 | 5.71 × 10−5 | 1.32 × 10−4 |
| 0.1 | 6.44 × 10−5 | 2.78 × 10−4 | 7.14 × 10−4 | 1.60 × 10−5 | 6.82 × 10−5 | 1.74 × 10−4 |
| 0.2 | 7.48 × 10−5 | 3.42 × 10−4 | 9.76 × 10−4 | 1.87 × 10−5 | 8.57 × 10−5 | 2.45 × 10−4 |
| 0.3 | 8.82 × 10−5 | 4.39 × 10−4 | 1.40 × 10−3 | 2.20 × 10−5 | 1.09 × 10−4 | 3.50 × 10−4 |
| 0.4 | 1.02 × 10−4 | 5.40 × 10−4 | 1.90 × 10−3 | 2.57 × 10−5 | 1.37 × 10−4 | 4.86 × 10−4 |
| 0.5 | 1.24 × 10−4 | 7.53 × 10−4 | 3.05 × 10−3 | 3.04 × 10−5 | 1.80 × 10−4 | 7.15 × 10−4 |
| 0.6 | 1.39 × 10−4 | 8.76 × 10−4 | 3.78 × 10−3 | 3.45 × 10−5 | 2.15 × 10−4 | 9.23 × 10−4 |
| 0.7 | 1.60 × 10−4 | 1.08 × 10−3 | 5.07 × 10−3 | 4.00 × 10−5 | 2.70 × 10−4 | 1.27 × 10−3 |
| 0.8 | 1.86 × 10−4 | 1.37 × 10−3 | 7.14 × 10−3 | 4.64 × 10−5 | 3.42 × 10−4 | 1.78 × 10−3 |
| 0.9 | 2.13 × 10−4 | 1.69 × 10−3 | 9.56 × 10−3 | 5.35 × 10−5 | 4.28 × 10−4 | 2.44 × 10−3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tural Polat, S.N.; Turan Dincel, A. Euler Wavelet Method as a Numerical Approach for the Solution of Nonlinear Systems of Fractional Differential Equations. Fractal Fract. 2023, 7, 246. https://doi.org/10.3390/fractalfract7030246
Tural Polat SN, Turan Dincel A. Euler Wavelet Method as a Numerical Approach for the Solution of Nonlinear Systems of Fractional Differential Equations. Fractal and Fractional. 2023; 7(3):246. https://doi.org/10.3390/fractalfract7030246
Chicago/Turabian StyleTural Polat, Sadiye Nergis, and Arzu Turan Dincel. 2023. "Euler Wavelet Method as a Numerical Approach for the Solution of Nonlinear Systems of Fractional Differential Equations" Fractal and Fractional 7, no. 3: 246. https://doi.org/10.3390/fractalfract7030246