


Multi-Machine Power System Transient Stability Enhancement Utilizing a Fractional Order-Based Nonlinear Stabilizer

Abstract
:1. Introduction
- ✓
- This paper introduces a novel control scheme founded on the synergetic control approach, tailored specifically for power systems equipped with FACTS devices. This control strategy is meticulously designed to enhance voltage regulation and transient stability within these systems.
- ✓
- This research marks the introduction of FC principles, with a particular emphasis on fractional-order control, into the domain of power system control. This integration endows the controller with the capability to dynamically adjust its coefficients, thereby reinforcing its resilience and adaptability in response to varying operational conditions.
- ✓
- This work presents a distinctive nature-inspired optimization framework known as FOFMO. This framework is employed to optimize the control parameters of the proposed nonlinear stabilizer, resulting in a substantial enhancement of the overall performance of the control scheme.
- ✓
- This research includes a rigorous and comprehensive numerical analysis, which examines the proposed control scheme in both single-machine and multi-machine power systems.
2. Designing the Proposed Controllers
2.1. Ensemble Approach for Synergetic Control
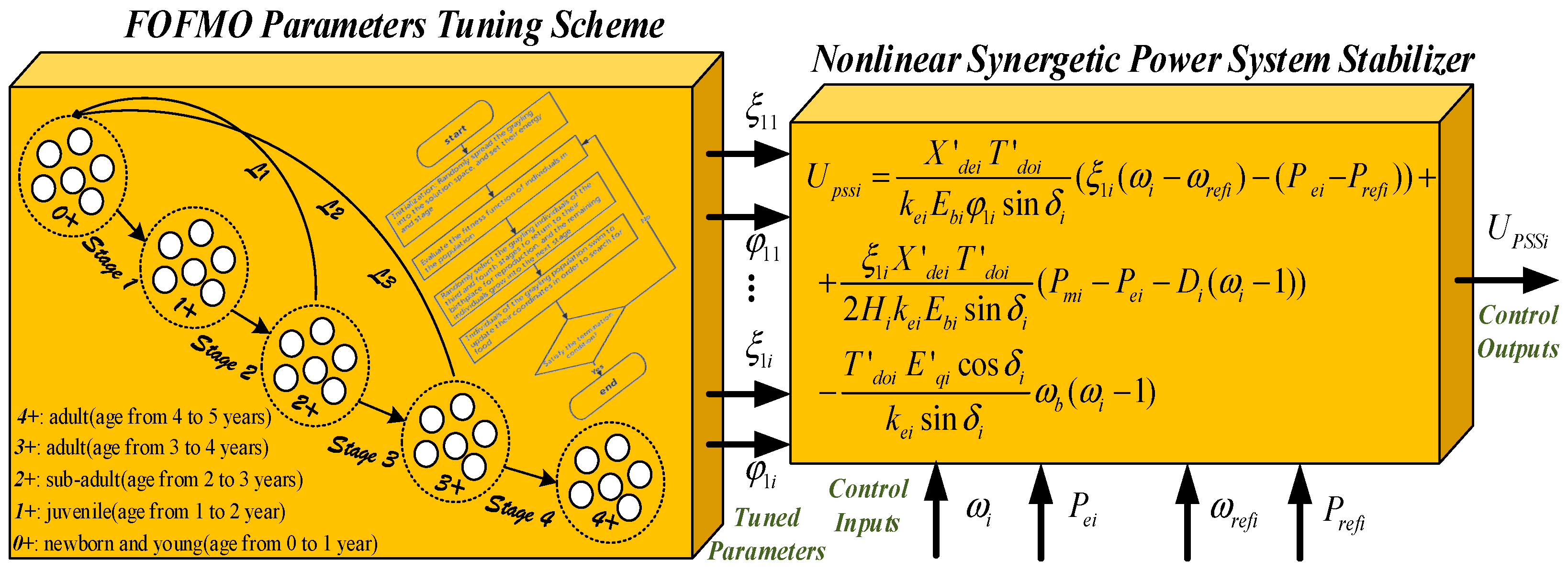
2.2. Fractional-Order Fish Migration Optimization Algorithm
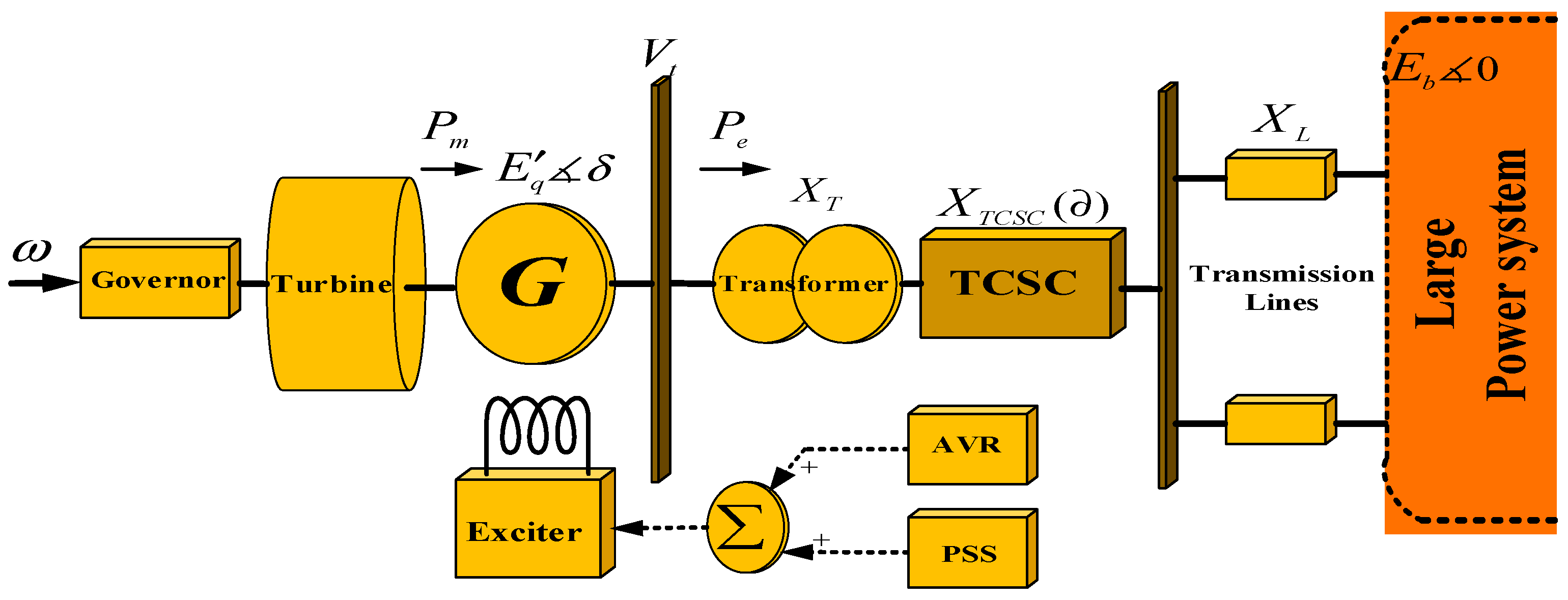
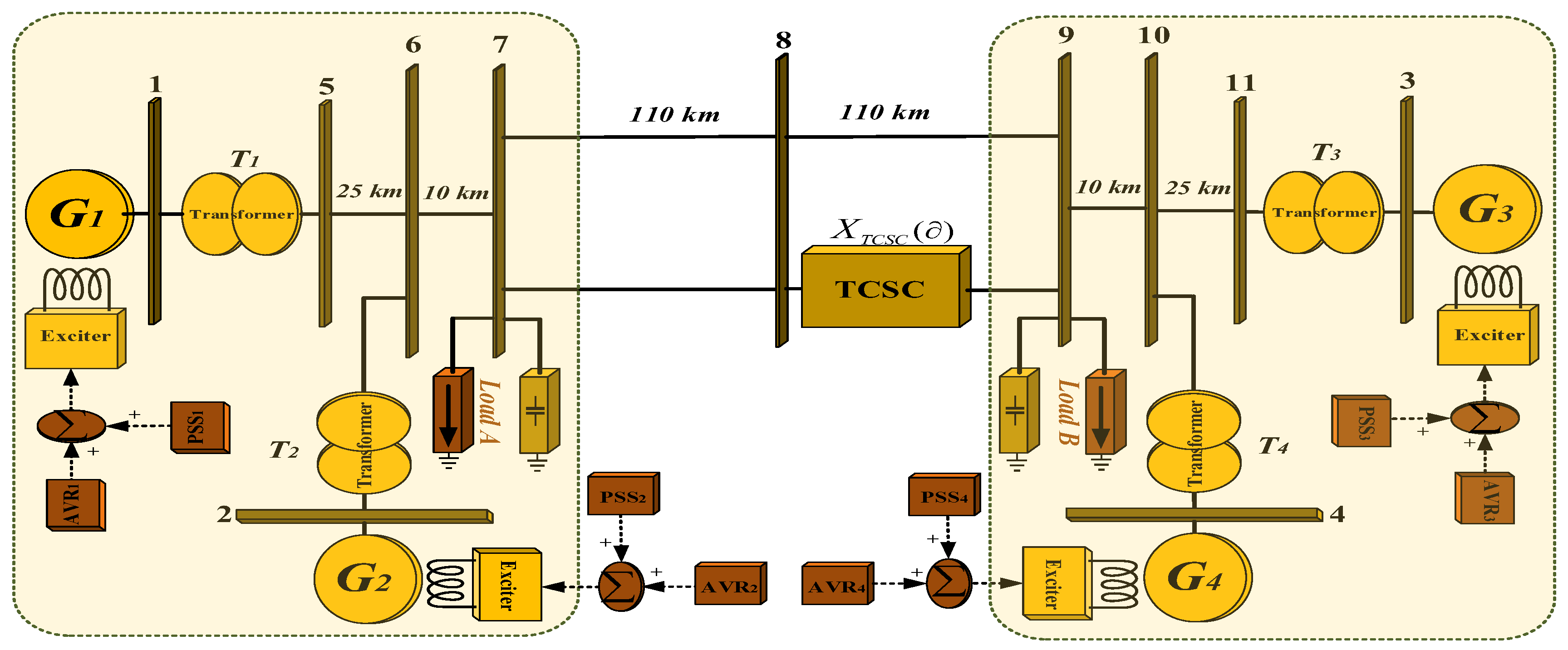
3. Power System Model
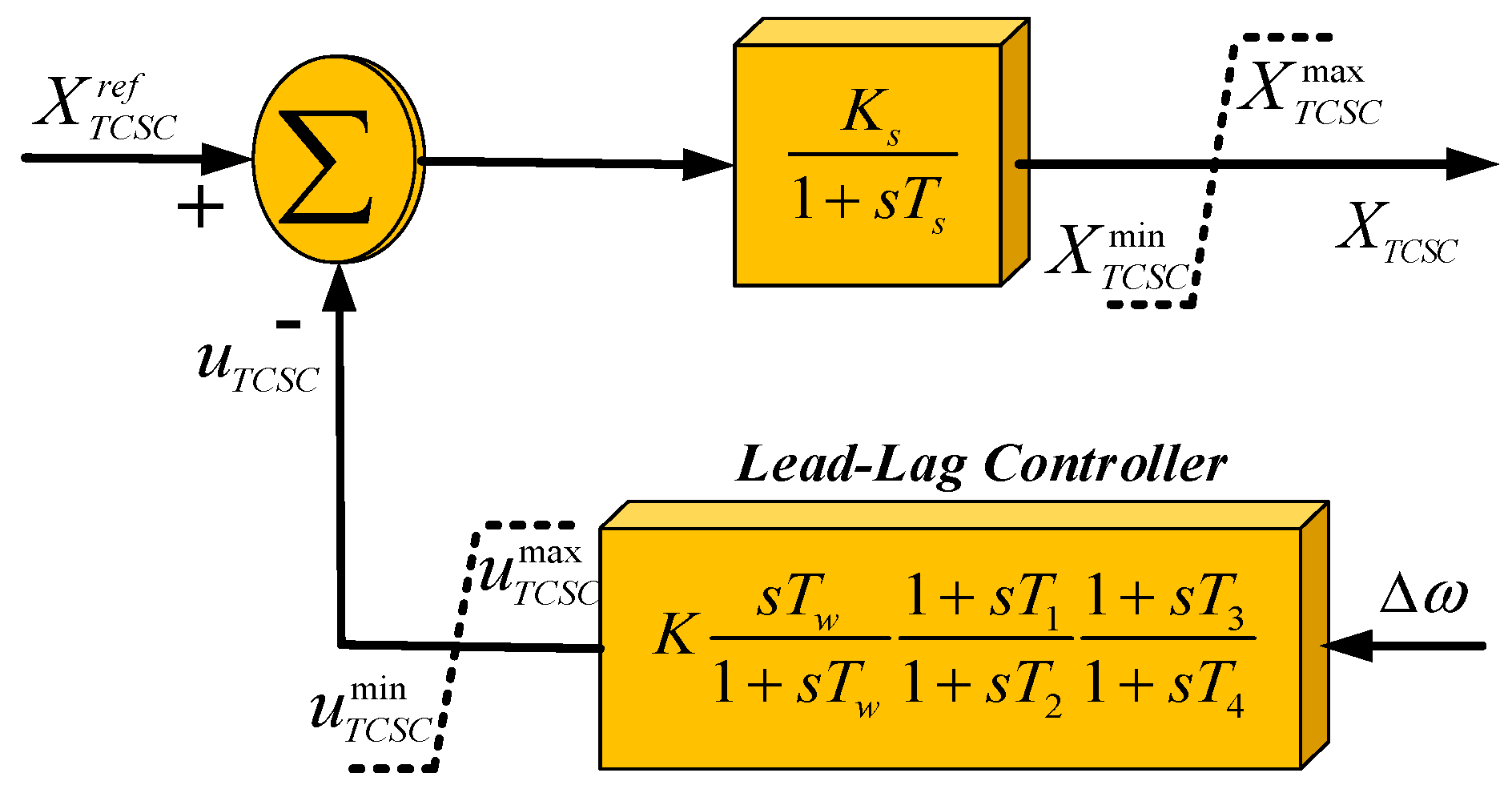
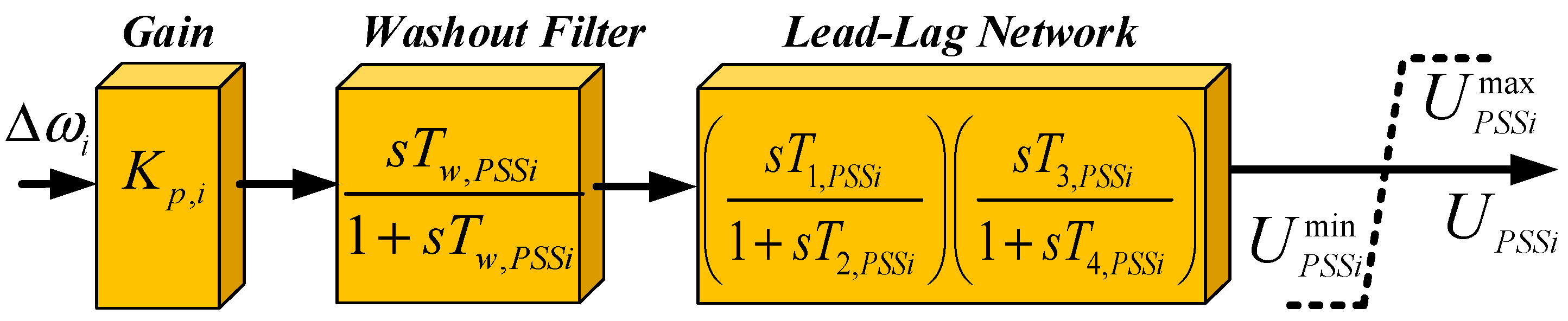
4. Designing the Proposed Nonlinear PSS in a Power System with TCSC
| Algorithm 1: The pseudo-code of the FOFMO parameter tuning scheme. |
| I: set the population size and dimension () II: set the searching space S, iter = 1 III: set the position matrix , and historical position matrix IV: set energy of particles V: set number of iteration (numofiter) VI: set grows condition VII: calculate fitness function values VIII: while (iter < numofiter) do IX: for j = 1: do X: for κ = 1: do XI: calculate energy ()& fractional-order positions () XII: update the historical positions (Equation (13)) XIV: end for XVI: compute the fitness value of new positions () XV: if then XVII: , and = XVIII: increase energy by XIX: end if XX: consuming energy by XXI: if then XXII: , the grayling died. XXIII: end if XXIV: if then XXV: XXIV: else if then XXV: if then XXVI: create and immigrate offspring (Equation (14)), and set XXVII: else XXVIII: set XXIX: end if XXX: else if then XXXI: create and immigrate offspring (Equation (14)), and set XXXII: end if XXXIII: end for XXXIV: iter = iter + 1 XXXV: end while |
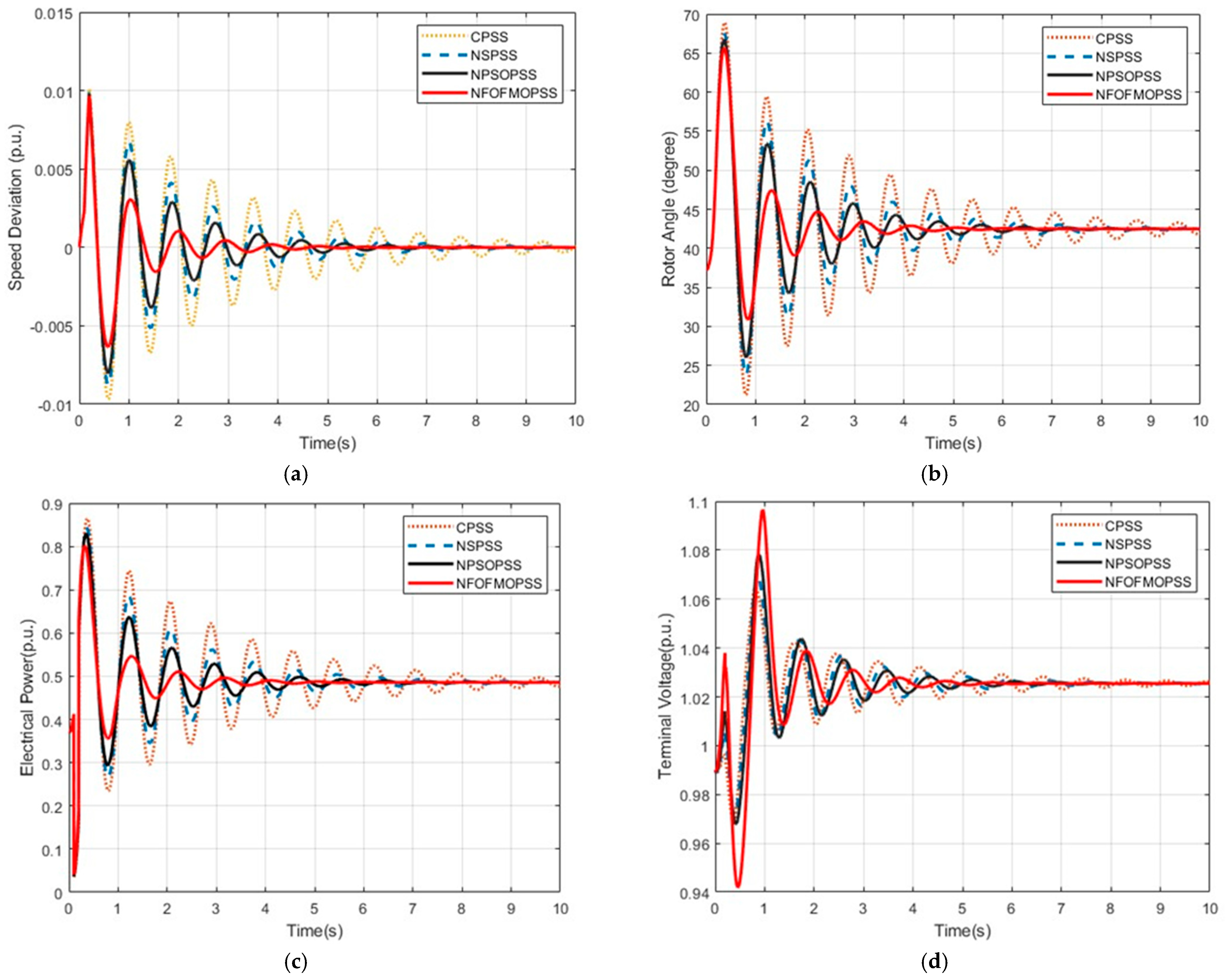
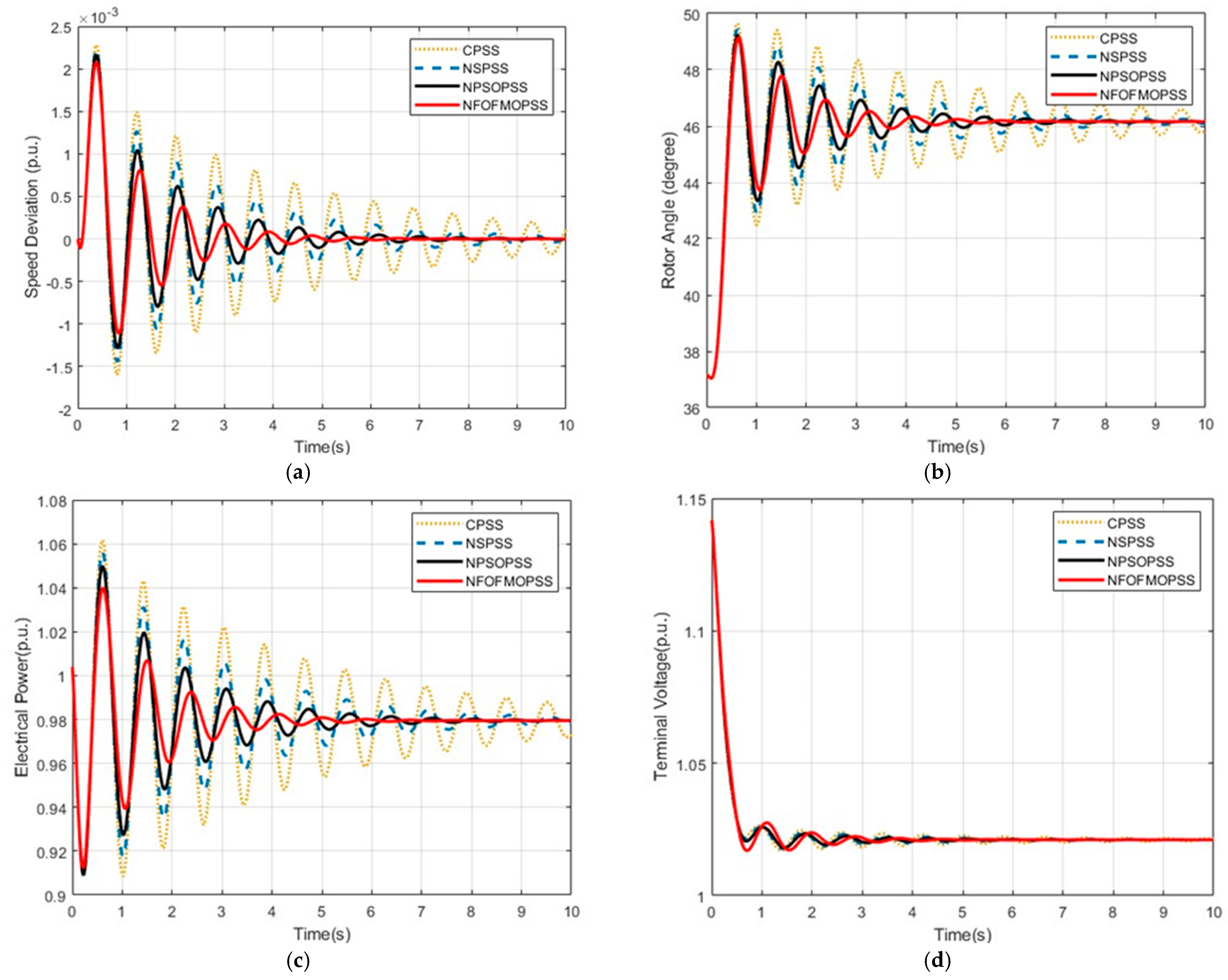
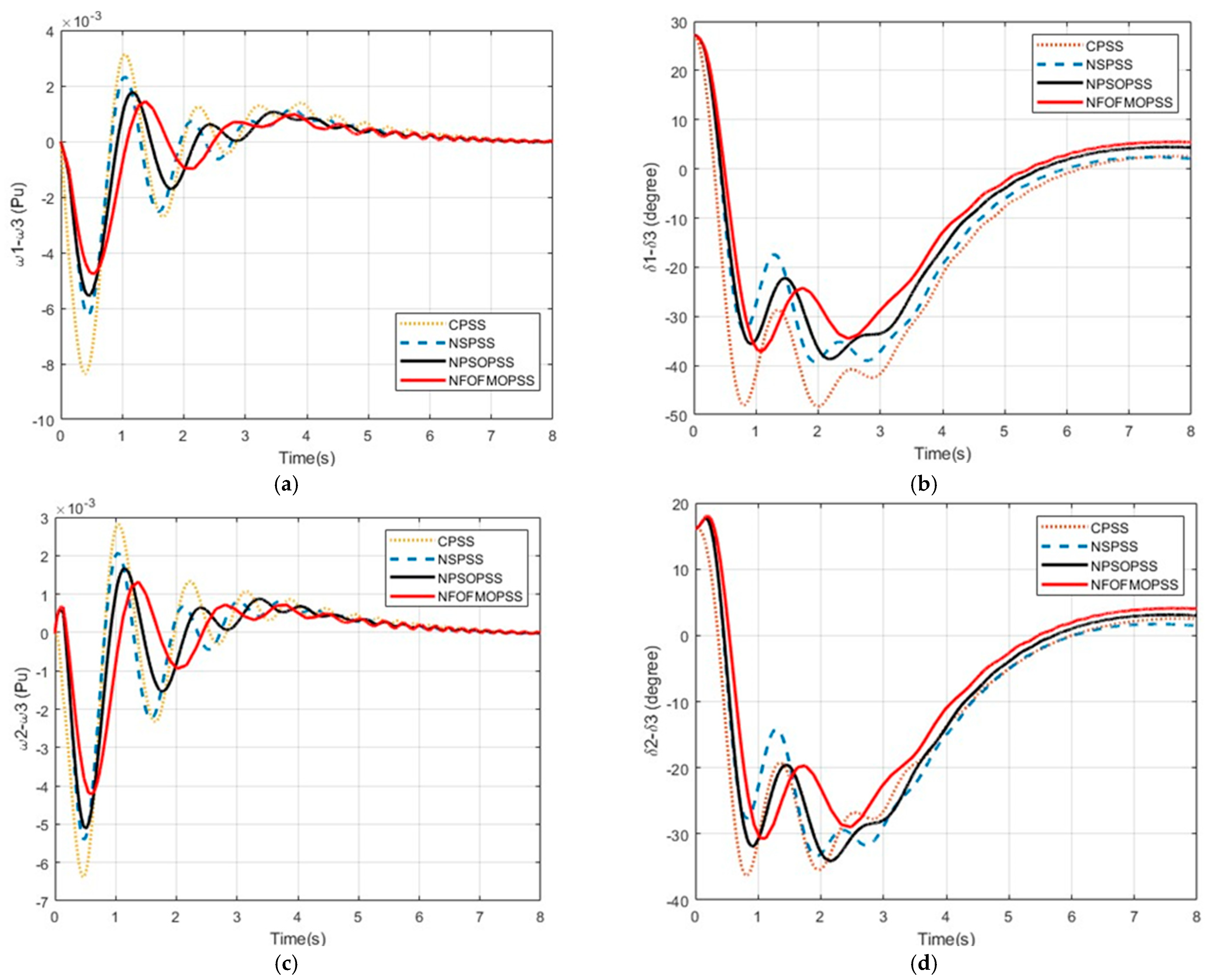
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sioshansi, R.; Denholm, P.; Arteaga, J.; Awara, S.; Bhattacharjee, S.; Botterud, A.; Cole, W.; Cortés, A.; Queiroz, A.d.; DeCarolis, J.; et al. Energy-Storage Modeling: State-of-the-Art and Future Research Directions. IEEE Trans. Power Syst. 2022, 37, 860–875. [Google Scholar] [CrossRef]
- Fathollahi, A.; Gheisarnejad, M.; Boudjadar, J.; Homayounzadeh, M.; Khooban, M.H. Optimal Design of Wireless Charging Electric Buses-Based Machine Learning: A Case Study of Nguyen-Dupuis Network. IEEE Trans. Veh. Technol. 2023, 72, 8449–8458. [Google Scholar] [CrossRef]
- Fathollahi, A.; Gheisarnejad, M.; Andresen, B.; Farsizadeh, H.; Khooban, M.H. Robust Artificial Intelligence Controller for Stabilization of Full-Bridge Converters Feeding Constant Power Loads. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 3504–3508. [Google Scholar] [CrossRef]
- Rezaei, M.A.; Fathollahi, A.; Rezaei, S.; Hu, J.; Gheisarnejad, M.; Teimouri, A.R.; Rituraj, R.; Mosavi, A.H.; Khooban, M.H. Adaptation of a Real-Time Deep Learning Approach With an Analog Fault Detection Technique for Reliability Forecasting of Capacitor Banks Used in Mobile Vehicles. IEEE Access 2022, 10, 132271–132287. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Jiang, Q. Sustained Oscillation Analysis of VSC Considering High-Order Oscillation Components. IEEE Trans. Power Syst. 2022, 37, 2471–2474. [Google Scholar] [CrossRef]
- Yildirim, B.; Razmi, P.; Fathollahi, A.; Gheisarnejad, M.; Khooban, M.H. Neuromorphic deep learning frequency regulation in stand-alone microgrids. Appl. Soft Comput. 2023, 144, 110418. [Google Scholar] [CrossRef]
- Øyvang, T.; Nøland, J.K.; Sharma, R.; Hegglid, G.J.; Lie, B. Enhanced Power Capability of Generator Units for Increased Operational Security Using NMPC. IEEE Trans. Power Syst. 2020, 35, 1562–1571. [Google Scholar] [CrossRef]
- Li, C.; Yang, Y.; Li, Y.; Cao, Y.; Murashov, I.; Xu, J.; Aleshina, A.; Blaabjerg, F. Generalized Stabilizer-Oriented Design for GFVSG Integrated Into Weak-Stiffness Power Networks. IEEE Trans. Power Syst. 2022, 37, 4958–4961. [Google Scholar] [CrossRef]
- Shahgholian, G.; Fattollahi, A. Improving power system stability using transfer function: A comparative analysis. Eng. Technol. Appl. Sci. Res. 2017, 7, 1946–1952. [Google Scholar] [CrossRef]
- Jankee, P.; Oyedokun, D.T.; Chisepo, H.K. Dynamic response of power systems with real GICs: Impact on generator excitation control. IEEE Trans. Power Deliv. 2022, 37, 4911–4922. [Google Scholar] [CrossRef]
- Sabo, A.; Wahab, N.I.A.; Othman, M.L.; Jaffar, M.Z.A.B.M.; Acikgoz, H.; Nafisi, H.; Shahinzadeh, H. Artificial Intelligence-Based Power System Stabilizers for Frequency Stability Enhancement in Multi-Machine Power Systems. IEEE Access 2021, 9, 166095–166116. [Google Scholar] [CrossRef]
- Boukarim, G.E.; Shaopeng, W.; Chow, J.H.; Taranto, G.N.; Martins, N. A comparison of classical, robust, and decentralized control designs for multiple power system stabilizers. IEEE Trans. Power Syst. 2000, 15, 1287–1292. [Google Scholar] [CrossRef]
- Saleem, B.; Badar, R.; Manzoor, A.; Judge, M.A.; Boudjadar, J.; Islam, S.U. Fully Adaptive Recurrent Neuro-Fuzzy Control for Power System Stability Enhancement in Multi Machine System. IEEE Access 2022, 10, 36464–36476. [Google Scholar] [CrossRef]
- Lala, J.A.O.; Gallardo, C.F. Adaptive Tuning of Power System Stabilizer Using a Damping Control Strategy Considering Stochastic Time Delay. IEEE Access 2020, 8, 124254–124264. [Google Scholar] [CrossRef]
- Fathollahi, A.; Kargar, A.; Yaser Derakhshandeh, S. Enhancement of power system transient stability and voltage regulation performance with decentralized synergetic TCSC controller. Int. J. Electr. Power Energy Syst. 2022, 135, 107533. [Google Scholar] [CrossRef]
- Sreedivya, K.M.; Aruna Jeyanthy, P.; Devaraj, D. Improved Design of Interval Type-2 Fuzzy based Wide Area Power System Stabilizer for Inter-area Oscillation Damping. Microprocess. Microsyst. 2021, 83, 103957. [Google Scholar] [CrossRef]
- Fattollahi, A.; Dehghani, M.; Yousefi, M.R. Analysis and Simulation Dynamic Behavior of Power System Equipped with PSS and Excitation System Stabilizer. Signal Process. Renew. Energy 2022, 6, 99–111. [Google Scholar]
- Guo, K.; Qi, Y.; Yu, J.; Frey, D.; Tang, Y. A Converter-Based Power System Stabilizer for Stability Enhancement of Droop-Controlled Islanded Microgrids. IEEE Trans. Smart Grid 2021, 12, 4616–4626. [Google Scholar] [CrossRef]
- Shahgholian, G.; Mardani, E.; Fattollahi, A. Impact of PSS and STATCOM devices to the dynamic performance of a multi-machine power system. Eng. Technol. Appl. Sci. Res. 2017, 7, 2113–2117. [Google Scholar] [CrossRef]
- Rahmatian, M.; Seyedtabaii, S. Multi-machine optimal power system stabilizers design based on system stability and nonlinearity indices using Hyper-Spherical Search method. Int. J. Electr. Power Energy Syst. 2019, 105, 729–740. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, X.; Fu, L.; Edrah, M. Stability and Dynamic Analysis of the PMSG-Based WECS With Torsional Oscillation and Power Oscillation Damping Capabilities. IEEE Trans. Sustain. Energy 2022, 13, 2196–2210. [Google Scholar] [CrossRef]
- Oshnoei, S.; Aghamohammadi, M.R.; Oshnoei, S.; Sahoo, S.; Fathollahi, A.; Khooban, M.H. A novel virtual inertia control strategy for frequency regulation of islanded microgrid using two-layer multiple model predictive control. Appl. Energy 2023, 343, 121233. [Google Scholar] [CrossRef]
- Mosayebi, M.; Fathollahi, A.; Gheisarnejad, M.; Farsizadeh, H.; Khooban, M.H. Smart emergency EV-to-EV portable battery charger. Inventions 2022, 7, 45. [Google Scholar] [CrossRef]
- Bouchama, Z.; Essounbouli, N.; Harmas, M.N.; Hamzaoui, A.; Saoudi, K. Reaching phase free adaptive fuzzy synergetic power system stabilizer. Int. J. Electr. Power Energy Syst. 2016, 77, 43–49. [Google Scholar] [CrossRef]
- Wang, J.; Liu, L.; Liu, C.; Liu, J. Fixed-Time Synergetic Control for a Seven-Dimensional Chaotic Power System Model. Int. J. Bifurc. Chaos 2019, 29, 1950130. [Google Scholar] [CrossRef]
- Anderson, J.A.; Haider, M.; Bortis, D.; Kolar, J.W.; Kasper, M.; Deboy, G. New Synergetic Control of a 20 kW Isolated VIENNA Rectifier Front-End EV Battery Charger. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 17–20 June 2019; pp. 1–8. [Google Scholar]
- Djennoune, S.; Bettayeb, M. Optimal synergetic control for fractional-order systems. Automatica 2013, 49, 2243–2249. [Google Scholar] [CrossRef]
- Mokhliss, H.; El-Amiri, A.; Rais, K. Estimation of five parameters of photovoltaic modules using a synergetic control theory approach. J. Comput. Electron. 2019, 18, 241–250. [Google Scholar] [CrossRef]
- Zhao, P.; Yao, W.; Wen, J.; Jiang, L.; Wang, S.; Cheng, S. Improved synergetic excitation control for transient stability enhancement and voltage regulation of power systems. Int. J. Electr. Power Energy Syst. 2015, 68, 44–51. [Google Scholar] [CrossRef]
- Kolesnikov, A.A. Introduction of Synergetic Control. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 3013–3016. [Google Scholar]
- Bezuglov, A.; Kolesnikov, A.; Kondratiev, I.; Juan, V. Synergetic Control Theory Approach for Solving Systems of Nonlinear Equations. In Proceedings of the WMSCI 2005-The 9th World Multi-Conference on Systemics, Cybernetics and Informatics, Proceedings, Orlando, FL, USA, 10–13 July 2005; pp. 121–126. [Google Scholar]
- Lu, Q.; Sun, Y.; Mei, S. Nonlinear Control Systems and Power System Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001; Volume 10. [Google Scholar]
- Chatterjee, K.; Samanta, S.; Chaudhuri, N.R. Insights Into Dissipating Energy-Based Source/Sink Characterization of TCSC and STATCOM for Low-Frequency Oscillations. IEEE Trans. Power Deliv. 2022, 38, 1426–1439. [Google Scholar] [CrossRef]
- Das, S.; Panigrahi, B.K.; Jaiswal, P.K. Qualitative Assessment of Power Swing for Enhancing Security of Distance Relay in a TCSC-Compensated Line. IEEE Trans. Power Deliv. 2021, 36, 223–234. [Google Scholar] [CrossRef]
- Prakash, A.; Kumar, K.; Parida, S.K. A Modal Transformation Approach to Design Reduced Order Functional Observer-Based WADC for Low-Frequency Oscillations. IEEE Trans. Power Syst. 2022, 38, 3593–3604. [Google Scholar] [CrossRef]
- Abrazeh, S.; Mohseni, S.R.; Zeitouni, M.J.; Parvaresh, A.; Fathollahi, A.; Gheisarnejad, M.; Khooban, M.H. Virtual Hardware-in-the-Loop FMU Co-Simulation Based Digital Twins for Heating, Ventilation, and Air-Conditioning (HVAC) Systems. IEEE Trans. Emerg. Top. Comput. Intell. 2023, 7, 65–75. [Google Scholar] [CrossRef]
- Chai, Q.-W.; Chu, S.-C.; Pan, J.-S.; Zheng, W.-M. Applying Adaptive and Self Assessment Fish Migration Optimization on Localization of Wireless Sensor Network on 3-D Te rrain. J. Inf. Hiding Multim. Signal Process. 2020, 11, 90–102. [Google Scholar]
- Pan, J.-S.; Tsai, P.-W.; Liao, Y.-B. Fish Migration Optimization Based on the Fishy Biology. In Proceedings of the 2010 Fourth International Conference on Genetic and Evolutionary Computing, Shenzhen, China, 13–15 December 2010; pp. 783–786. [Google Scholar]
- Povstenko, Y. Thermoelasticity that uses fractional heat conduction equation. J. Math. Sci. 2009, 162, 296–305. [Google Scholar] [CrossRef]
- Boudjemaa, R.; Oliva, D.; Ouaar, F. Fractional Lévy flight bat algorithm for global optimisation. Int. J. Bio Inspired Comput. 2020, 15, 100–112. [Google Scholar] [CrossRef]
- Couceiro, M.S.; Rocha, R.P.; Ferreira, N.; Machado, J. Introducing the fractional-order Darwinian PSO. Signal Image Video Process. 2012, 6, 343–350. [Google Scholar] [CrossRef]
- Yousri, D.; Mirjalili, S. Fractional-order cuckoo search algorithm for parameter identification of the fractional-order chaotic, chaotic with noise and hyper-chaotic financial systems. Eng. Appl. Artif. Intell. 2020, 92, 103662. [Google Scholar] [CrossRef]
- Mousavi, Y.; Alfi, A.; Kucukdemiral, I.B. Enhanced fractional chaotic whale optimization algorithm for parameter identification of isolated wind-diesel power systems. IEEE Access 2020, 8, 140862–140875. [Google Scholar] [CrossRef]
- Pan, J.-S.; Hu, P.; Chu, S.-C. Binary fish migration optimization for solving unit commitment. Energy 2021, 226, 120329. [Google Scholar] [CrossRef]
- Guo, B.; Zhuang, Z.; Pan, J.S.; Chu, S.C. Optimal Design and Simulation for PID Controller Using Fractional-Order Fish Migration Optimization Algorithm. IEEE Access 2021, 9, 8808–8819. [Google Scholar] [CrossRef]
- Chiranjeevi, T.; Biswas, R.K. Computational Method Based on Reflection Operator for Solving a Class of Fractional Optimal Control Problem. Procedia Comput. Sci. 2020, 171, 2030–2039. [Google Scholar] [CrossRef]
- Antivachis, M.; Anderson, J.A.; Bortis, D.; Kolar, J.W. Analysis of a synergetically controlled two-stage three-phase DC/AC buck-boost converter. CPSS Trans. Power Electron. Appl. 2020, 5, 34–53. [Google Scholar] [CrossRef]
- Das, T.K.; Venayagamoorthy, G.K.; Aliyu, U.O. Bio-inspired algorithms for the design of multiple optimal power system stabilizers: SPPSO and BFA. IEEE Trans. Ind. Appl. 2008, 44, 1445–1457. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | G1 | G2 | G3 | G4 |
|---|---|---|---|---|
| NPSOPSS | ξ11 = 207.1 | ξ11 = 182.2 | ξ11 = 214.8 | ξ11 = 238.4 |
| φ11 = 0.021 s | φ11 = 0.020 s | φ11 = 0.0191 s | φ11 = 0.020 s | |
| NFOFMOPSS | ξ11 = 273.2 | ξ11 = 238.8 | ξ11 = 227.6 | ξ11 = 237.1 |
| φ11 = 0.011 s | φ11 = 0.012 s | φ11 = 0.015 s | φ11 = 0.012 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fathollahi, A.; Andresen, B. Multi-Machine Power System Transient Stability Enhancement Utilizing a Fractional Order-Based Nonlinear Stabilizer. Fractal Fract. 2023, 7, 808. https://doi.org/10.3390/fractalfract7110808
Fathollahi A, Andresen B. Multi-Machine Power System Transient Stability Enhancement Utilizing a Fractional Order-Based Nonlinear Stabilizer. Fractal and Fractional. 2023; 7(11):808. https://doi.org/10.3390/fractalfract7110808
Chicago/Turabian StyleFathollahi, Arman, and Björn Andresen. 2023. "Multi-Machine Power System Transient Stability Enhancement Utilizing a Fractional Order-Based Nonlinear Stabilizer" Fractal and Fractional 7, no. 11: 808. https://doi.org/10.3390/fractalfract7110808