
Bifurcation Phenomenon and Control Technique in Fractional BAM Neural Network Models Concerning Delays


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Existence and Uniqueness
4. Boundedness
5. Stability Trait and Bifurcation Phenomenon
- (i)
- Relying on (33), we gainConsidering that , we gain ,∀ . In addition, , from which we can understand that Equation (31) admits no real positive root. Using , we can further understand that is not the solution to (24). This ends the proof of (i).
- (ii)
- Clearly, and ; thus, there exist and obeying meaning that Equation (31) admits at least both real positive roots. Therefore, (24) admits at least two pairs of complex roots with zero real roots. This ends the the proof of (ii).
6. Hopf Bifurcation Control via Delayed Feedback Controller
- (i)
- Relying on (57), we gainConsidering that , we gain ,∀ . In addition, ; thus, we can understand that Equations (55) admits no real positive root. Using , we know that is not the solution of (48). This ends the proof of (i).
- (ii)
- Clearly, and ; thus, there exist and obeying meaning that Equation (55) has at least two real positive roots. Therefore, (48) admits at least two pairs of complex roots with zero real parts. This ends the the proof of (ii).
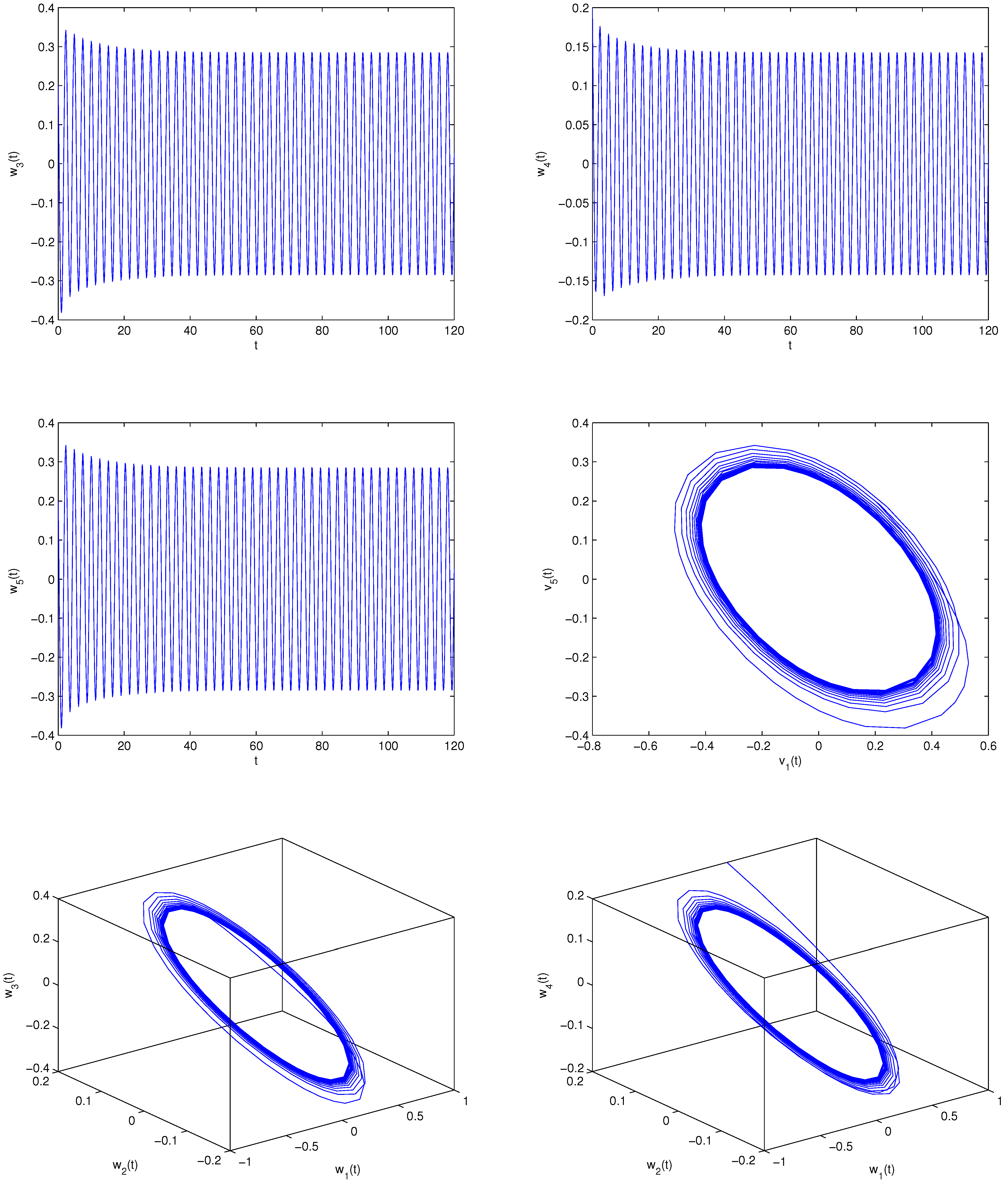
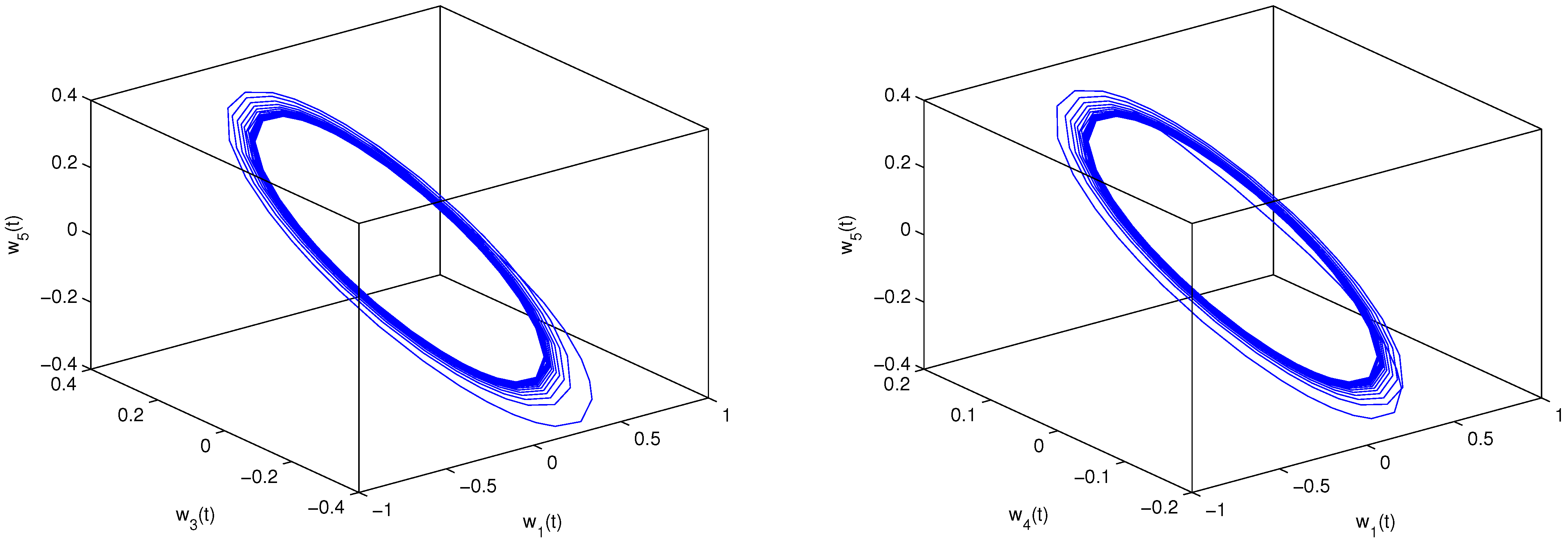
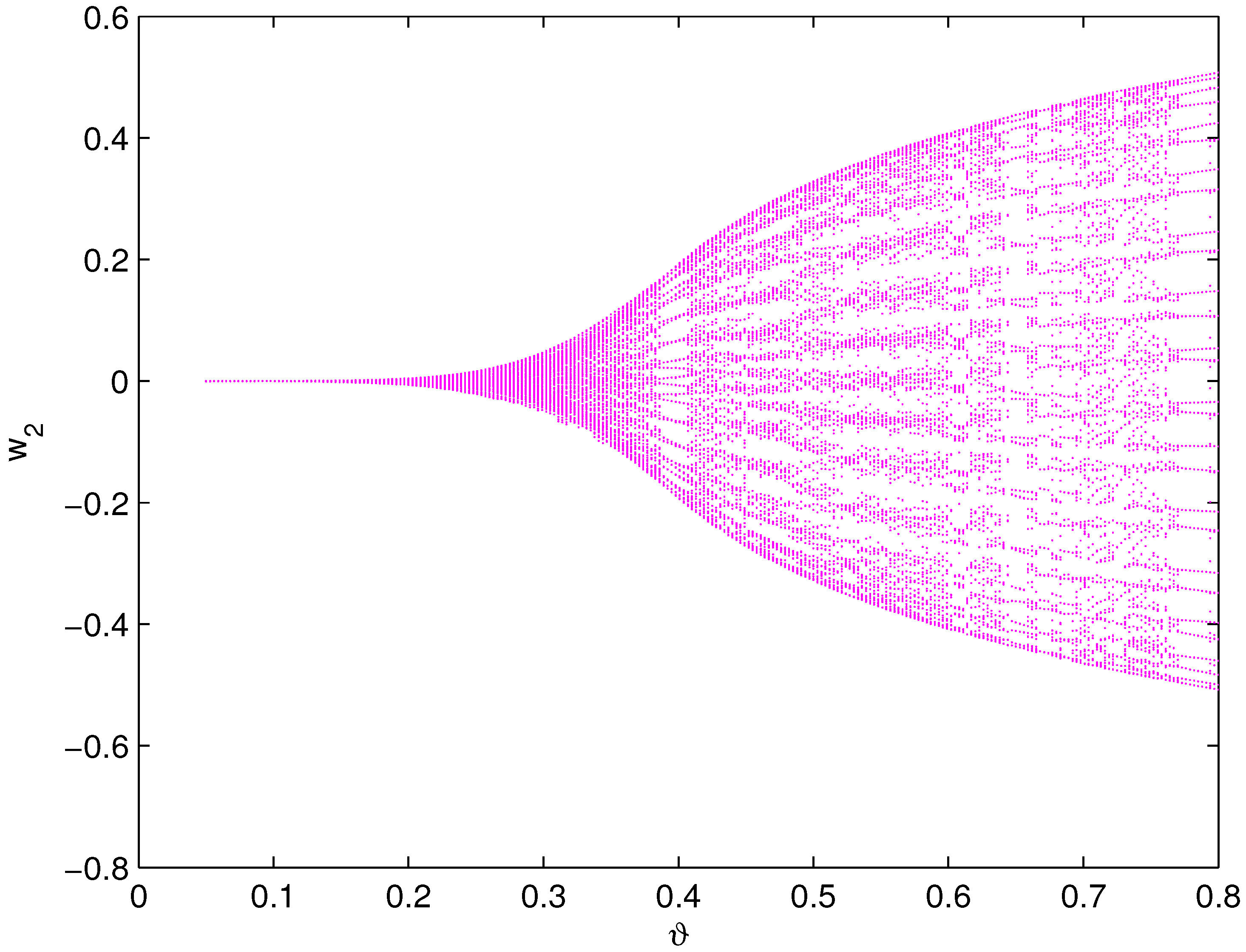
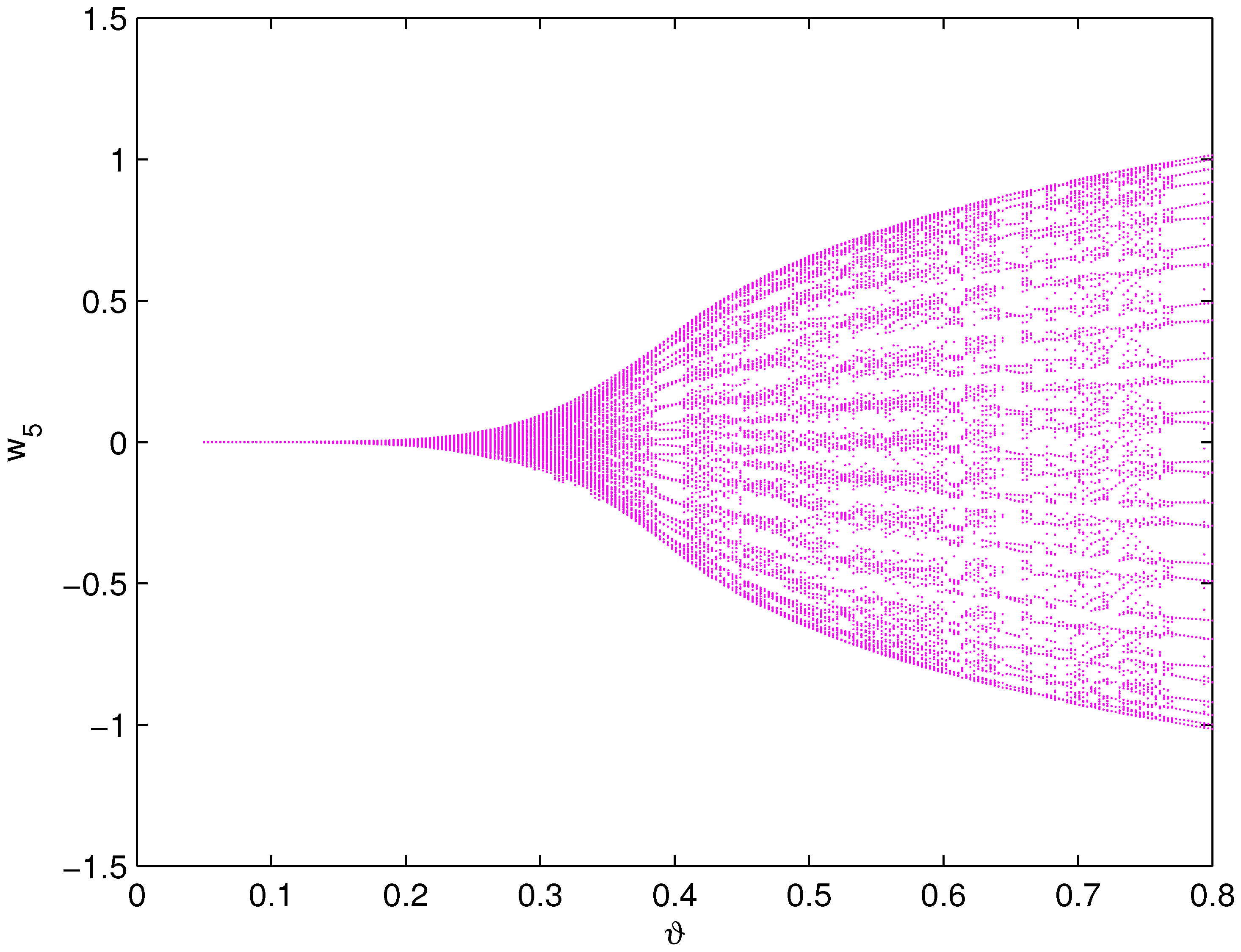
7. Computer Simulations
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, P.; Li, X.C.; Wang, N.; Li, Y.Y.; Shi, K.B.; Lu, J.Q. Almost periodic synchronization of quaternion-valued fuzzy cellular neural networks with leakage delays. Fuzzy Sets Syst. 2022, 426, 46–65. [Google Scholar] [CrossRef]
- Aouiti1, C.; M’hamdi, M.S.; Touati, A. Pseudo almost automorphic solution of recurrent neural networks with time-varying coefficients and mixed delays. Neural Process. Lett. 2017, 45, 121–140. [Google Scholar] [CrossRef]
- Xu, C.J.; Li, P.L.; Pang, Y.C. Exponential stability of almost periodic solutions for memristor-based neural networks with distributed leakage delays. Neural Comput. 2016, 28, 2726–2756. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.J.; Zhang, Q.M. On anti-periodic solutions for Cohen-Grossberg shunting inhibitory neural networks with time-varying delays and impulses. Neural Comput. 2014, 26, 2328–2349. [Google Scholar] [CrossRef] [PubMed]
- Karnan, A.; Nagamani, G. Non-fragile state estimation for memristive cellular neural networks with proportional delay. Math. Comput. Simul. 2022, 193, 217–231. [Google Scholar] [CrossRef]
- Li, Y.K.; Shen, S.P. Almost automorphic solutions for Clifford-valued neutral-type fuzzy cellular neural networks with leakage delays on time scales. Neurocomputing 2020, 417, 23–35. [Google Scholar] [CrossRef]
- Xu, C.J.; Liao, M.X.; Li, P.L.; Liu, Z.X.; Yuan, S. New results on pseudo almost periodic solutions of quaternion-valued fuzzy cellular neural networks with delays. Fuzzy Sets Syst. 2021, 411, 25–47. [Google Scholar] [CrossRef]
- Cui, W.X.; Wang, Z.J.; Jin, W.B. Fixed-time synchronization of Markovian jump fuzzy cellular neural networks with stochastic disturbance and time-varying delays. Fuzzy Sets Syst. 2021, 411, 68–84. [Google Scholar] [CrossRef]
- Huang, C.X.; Wen, S.G.; Huang, L.H. Dynamics of anti-periodic solutions on shunting inhibitory cellular neural networks with multi-proportional delays. Neurocomputing 2019, 357, 47–52. [Google Scholar] [CrossRef]
- Ali, M.S.; Yogambigai, J.; Saravanan, S.; Elakkia, S. Stochastic stability of neutral-type Markovian-jumping BAM neural networks with time varying delays. J. Comput. Appl. Math. 2019, 349, 142–156. [Google Scholar] [CrossRef]
- Sowmiya, C.; Raja, R.; Zhu, Q.X.; Rajchakit, G. Further mean-square asymptotic stability of impulsive discrete-time stochastic BAM neural networks with Markovian jumping and multiple time-varying delays. J. Frankl. Inst. 2019, 356, 561–591. [Google Scholar] [CrossRef]
- Oliveira, J.J. Global stability criteria for nonlinear differential systems with infinite delay and applications to BAM neural networks. Chaos Solitons Fractals 2022, 164, 112676. [Google Scholar] [CrossRef]
- Zhang, T.W.; Li, Y.K. Global exponential stability of discrete-time almost automorphic Caputo-Fabrizio BAM fuzzy neural networks via exponential Euler technique. Knowl.-Based Syst. 2022, 246, 108675. [Google Scholar] [CrossRef]
- Thoiyab, N.M.; Muruganantham, P.; Zhu, Q.X.; Gunasekaran, N. Novel results on global stability analysis for multiple time-delayed BAM neural networks under parameter uncertainties. Chaos Solitons Fractals 2021, 152, 111441. [Google Scholar] [CrossRef]
- Xu, C.J.; Liao, M.X.; Li, P.L.; Guo, Y.; Liu, Z.X. Bifurcation properties for fractional order delayed BAM neural networks. Cogn. Comput. 2021, 13, 322–356. [Google Scholar] [CrossRef]
- Du, W.T.; Xiao, M.; Ding, J.; Yao, Y.; Wang, Z.X.; Yang, X.S. Fractional-order PD control at Hopf bifurcation in a delayed predator-prey system with trans-species infectious diseases. Math. Comput. Simul. 2023, 205, 414–438. [Google Scholar] [CrossRef]
- Xu, C.J.; Zhang, W.; Liu, Z.X.; Yao, L.Y. Delay-induced periodic oscillation for fractional-order neural networks with mixed delays. Neurocomputing 2022, 488, 681–693. [Google Scholar] [CrossRef]
- Xu, C.J.; Liu, Z.X.; Liao, M.X.; Yao, L.Y. Theoretical analysis and computer simulations of a fractional order bank data model incorporating two unequal time delays. Expert Syst. Appl. 2022, 199, 116859. [Google Scholar] [CrossRef]
- Xu, C.J.; Mu, D.; Liu, Z.X.; Pang, Y.C.; Liao, M.X.; Yao, P.L.L.L.Y.; Qin, Q.W. Comparative exploration on bifurcation behavior for integer-order and fractional-order delayed BAM neural networks. Nonlinear Anal. Model. Control 2022. [Google Scholar] [CrossRef]
- Huang, C.D.; Wang, J.; Chen, X.P.; Cao, J.D. Bifurcations in a fractional-order BAM neural network with four different delays. Neural Netw. 2021, 141, 344–354. [Google Scholar] [CrossRef]
- Bentout, S.; Djilali, S.; Kumar, S. Mathematical analysis of the influence of prey escaping from prey herd on three species fractional predator-prey interaction model. Phys. A Stat. Mech. Appl. 2021, 572, 125840. [Google Scholar] [CrossRef]
- Deshpande, A.S.; Daftardar-Gejji, V.; Sukale, Y.V. On Hopf bifurcation in fractional dynamical systems. Chaos Solitons Fractals 2017, 98, 189–198. [Google Scholar] [CrossRef]
- Vivek, D.; Kanagarajan, K.; Elsayed, E.M. Some existence and stability results for Hilfer-fractional implicit differential equations with nonlocal conditions. Mediterr. J. Math. 2018, 15, 1–21. [Google Scholar] [CrossRef]
- Harikrishnan, S.; Kanagarajan, K.; Elsayed, E.M. Existence and stability results for differential equations with complex order involving Hilfer fractional derivative. TWMS J. Pure Appl. Math. 2019, 10, 94–101. [Google Scholar]
- Ci, J.X.; Guo, Z.Y.; Long, H.; Wen, S.P.; Huang, T.W. Multiple asymptotical ω-periodicity of fractional-order delayed neural networks under state-dependent switching. Neural Netw. 2023, 157, 11–25. [Google Scholar] [CrossRef]
- Lin, Y.T.; Wang, J.L.; Liu, C.G. Output synchronization analysis and PD control for coupled fractional-order neural networks with multiple weights. Neurocomputing 2023, 519, 17–25. [Google Scholar] [CrossRef]
- Xiao, J.; Wu, L.; Wu, A.L.; Zeng, Z.G.; Zhang, Z. Novel controller design for finite-time synchronization of fractional-order memristive neural networks. Neurocomputing 2022, 512, 494–502. [Google Scholar] [CrossRef]
- Zhang, X.L.; Li, H.L.; Kao, Y.G.; Zhang, L.; Jiang, H.J. Global Mittag-Leffler synchronization of discrete-time fractional-order neural networks with time delays. Appl. Math. Comput. 2022, 433, 127417. [Google Scholar] [CrossRef]
- Qiu, H.L.; Cao, J.D.; Liu, H. Passivity of fractional-order coupled neural networks with interval uncertainties. Math. Comput. Simul. 2023, 205, 845–860. [Google Scholar] [CrossRef]
- Ali, M.S.; Narayanan, G.; Sevgen, S.; Shekher, V.; Arik, S. Global stability analysis of fractional-order fuzzy BAM neural networks with time delay and impulsive effects. Commun. Nonlinear Sci. Numer. Simul. 2019, 78, 104853. [Google Scholar]
- Popa, C.A. Mittag–CLeffler stability and synchronization of neutral-type fractional-order neural networks with leakage delay and mixed delays. J. Frankl. Inst. 2022. [Google Scholar] [CrossRef]
- Shafiya, M.; Nagamani, G. New finite-time passivity criteria for delayed fractional-order neural networks based on Lyapunov function approach. Chaos Solitons Fractals 2022, 158, 112005. [Google Scholar] [CrossRef]
- Huang, C.D.; Nie, X.B.; Zhao, X.; Song, Q.K.; Tu, Z.W.; Xiao, M.; Cao, J.D. Novel bifurcation results for a delayed fractional-order quaternion-valued neural network. Neural Netw. 2019, 117, 67–93. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.J.; Mu, D.; Pan, Y.L.; Aouiti, C.; Pang, Y.C.; Yao, L.Y. Probing into bifurcation for fractional-order BAM neural networks concerning multiple time delays. J. Comput. Sci. 2022, 62, 101701. [Google Scholar] [CrossRef]
- Huang, C.D.; Meng, Y.J.; Cao, J.D.; Alsaedi, A.; Alsaadi, F.E. New bifurcation results for fractional BAM neural network with leakage delay. Chaos Solitons Fractals 2017, 100, 31–44. [Google Scholar] [CrossRef]
- Kaslik, E.; Rădulescu, I.R. Stability and bifurcations in fractional-order gene regulatory networks. Appl. Math. Comput. 2022, 421, 126916. [Google Scholar] [CrossRef]
- Xu, C.J.; Liu, Z.X.; Aouiti, C.; Li, P.L.; Yao, L.Y.; Yan, J.L. New exploration on bifurcation for fractional-order quaternion-valued neural networks involving leakage delays. Cogn. Neurodyn. 2022, 16, 1233–1248. [Google Scholar] [CrossRef]
- Wang, Y.L.; Cao, J.D.; Huang, C.D. Exploration of bifurcation for a fractional-order BAM neural network with n+2 neurons and mixed time delays. Chaos Solitons Fractals 2022, 159, 112117. [Google Scholar] [CrossRef]
- Li, S.; Huang, C.D.; Yuan, S.L. Hopf bifurcation of a fractional-order double-ring structured neural network model with multiple communication delays. Nonlinear Dyn. 2022, 108, 379–396. [Google Scholar] [CrossRef]
- Mo, S.S.; Huang, C.D.; Cao, J.D.; Alsaedi, A. Dynamical bifurcations in a fractional-order neural network with nonidentical communication delays. Cogn. Comput. 2022. [Google Scholar] [CrossRef]
- Yang, Y.; Ye, J. Stability and bifurcation in a simplified five-neuron BAM neural networks with delays. Chaos Solitons Fractals 2009, 42, 2357–2363. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Bandyopadhyay, B.; Kamal, S. Stabliization and Control of Fractional Order Systems: A Sliding Mode Approach; Springer: Heidelberg, Germany, 2015; Volume 317. [Google Scholar]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 2009, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Li, H.L.; Zhang, L.; Hu, C.; Jiang, Y.L.; Teng, Z.D. Dynamical analysis of a fractional-order predator-prey model incorporating a prey refuge. J. Appl. Math. Comput. 2017, 54, 435–449. [Google Scholar] [CrossRef]
- Matignon, D. Stability results for fractional differential equations with applications to control processing. Comput. Eng. Syst. Appl. 1996, 2, 963–968. [Google Scholar]
- Wang, X.H.; Wang, Z.; Xia, J.W. Stability and bifurcation control of a delayed fractional-order eco-epidemiological model with incommensurate orders. J. Frankl. Inst. 2019, 356, 8278–8295. [Google Scholar] [CrossRef]
- Deng, W.H.; Li, C.P.; Lü, J.H. Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 2007, 48, 409–416. [Google Scholar] [CrossRef]
- Yu, P.; Chen, G.R. Hopf bifurcation control using nonlinear feedback with polynomial functions. Int. J. Bifurc. Chaos 2004, 14, 1683–1704. [Google Scholar] [CrossRef]






























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Lu, Y.; Xu, C.; Ren, J. Bifurcation Phenomenon and Control Technique in Fractional BAM Neural Network Models Concerning Delays. Fractal Fract. 2023, 7, 7. https://doi.org/10.3390/fractalfract7010007
Li P, Lu Y, Xu C, Ren J. Bifurcation Phenomenon and Control Technique in Fractional BAM Neural Network Models Concerning Delays. Fractal and Fractional. 2023; 7(1):7. https://doi.org/10.3390/fractalfract7010007
Chicago/Turabian StyleLi, Peiluan, Yuejing Lu, Changjin Xu, and Jing Ren. 2023. "Bifurcation Phenomenon and Control Technique in Fractional BAM Neural Network Models Concerning Delays" Fractal and Fractional 7, no. 1: 7. https://doi.org/10.3390/fractalfract7010007